1. Introduction
As intelligent technology continues to advance, unmanned surface vessels (USVs) are increasingly being utilized across various domains [
1]. Vessels, typically equipped with various devices, find extensive applications in areas such as environmental protection, scientific research, maritime rescue, resource exploration, mine sweeping, and anti-submarine warfare, presenting vast prospects for their utilization [
2]. However, vessels operate in complex and dynamic maritime environments, subject to strong external factors such as wind, waves, and currents, while the number of vessels at sea continues to rise, leading to increasingly congested waterways. Additionally, vessel motion exhibits significant inertia, nonlinearity, uncertainty, and underactuation, further heightening the risk of potential collision accidents [
3].
According to the Annual Overview of Maritime Casualties and Incidents for 2022 released by the European Maritime Safety Agency, from 2016 to 2021, over half of the reported maritime accidents occurred in the “Internal Waters” region, followed by the “Territorial Seas” and the “Open Seas”. Among these, the “Internal Waters-Port Area” subcategory was the region with the highest frequency of accidents. Detailed accident occurrences in each region are shown in
Figure 1. The graph shows that in 2021, maritime accidents within the Internal Waters region accounted for 55.7% of the total, with the Internal Waters-Port Area subcategory constituting 39.7% of this total. Meanwhile, the Open Seas and Territorial Seas accounted for 23.1% and 18.9% of the total incidents, respectively. Incidents occurring within port areas have the potential to cause fuel or cargo spills, thus triggering port pollution and causing substantial economic and environmental damage. Recognizing the significant losses that can result from ship accidents, port authorities worldwide are committed to reducing the incidence of maritime accidents within ports [
4]. In this regard, the examination of autonomous berthing for vessels has high research significance.
In recent years, numerous researchers have delved into the study of automated berthing, yielding a plethora of research outcomes. The prevailing approach in this field currently involves decomposing the problem of automated berthing into the planning of berthing trajectories and the design of tracking controllers. In terms of berthing trajectory planning, researchers often build upon various intelligent algorithmic frameworks such as A* algorithm, optimal control algorithm, artificial potential field method, and dynamic window approach. Given the complexity of berthing tasks, these intelligent algorithms are typically refined and adapted to suit berthing scenarios effectively. In 2021, R. Sawada [
5] utilized third-order Bezier curves to fit the berthing trajectory of ships from departure points to docks, yielding a smooth and traversable berthing path. Similarly, in 2021, Yuan [
6] proposed an A* algorithm based on Bezier curves to devise smooth berth trajectories. To ensure the USV velocity converged to zero at the berth, an interpolation method was introduced to densify the route points at the end of the berth trajectory. Moreover, to enhance computational efficiency during USV berthing, an Event-Triggered Adaptive Horizon Model Predictive Control method was introduced. In 2019, Liu [
7] analyzed hazardous factors affecting vessel berthing processes, such as port environmental interference, economic demands, collision avoidance requirements, channel separation rules, and vessel maneuverability constraints. They developed a risk model for these factors and improved the traditional A* algorithm to consider not only the shortest path but also to avoid high-risk areas when generating paths. In 2020, Miyauchi [
8] introduced a collision avoidance algorithm based on ship domains to address obstacles within ports for the berthing and departing operations of USVs. The algorithm dynamically adjusts the size of the ship domain to accommodate changes in ship velocity, thus integrating spatial constraints into the optimization process. Additionally, they accounted for the influence of wind disturbances on trajectory planning to ensure the feasibility of generated trajectories within actuator capacity limits. Through testing in two existing ports, the effectiveness of the proposed method was verified, achieving commendable performance in both berthing and departing scenarios. This approach successfully optimized control inputs and trajectories while adeptly avoiding collisions with complex obstacles. Maki [
9] proposed an offline berthing maneuver calculation method, wherein the optimal control problem was formulated as a minimum-time problem, with due consideration given to the collision risk with the berth. Furthermore, an attempt was made to utilize the covariance matrix adaptation evolution strategy (CMA-ES) to address the optimal control berthing problem. In 2021, Han [
10] proposed an Extended Dynamic Window Approach for automated berthing motion planning. This method established a pre-selected force window instead of a velocity window within the Dynamic Window Approach, predicting trajectories that the vessel could achieve in constant force and deceleration stages through the USV’s dynamic model. Subsequently, these trajectories were evaluated using an objective function, with the optimal solution selected as the tracking object. In 2020, Martinsen [
11], considering dynamic and obstacle constraints during vessel berthing, transformed the berthing problem into a nonlinear optimal control problem. While ensuring the vessel’s berthing path adhered to kinematic characteristics, they achieved safe obstacle avoidance during berthing. They also developed an ensemble generation method, integrating port maps with distance sensors such as LIDAR to calculate the position of safe areas in real-time, thus addressing the issue of port maps and actual environment mismatch. Han [
12] proposed a potential field-based Extended Dynamic Window Approach (EDWA) to tackle the challenge of real-time trajectory planning in automatic berthing. This approach incorporates a nonuniform Theta* (NT*) for global path search, effectively avoiding local minima while considering obstacle risk. Within EDWA, three distinct potential fields are established: an attractive field guides the Unmanned Surface Vehicle (USV) along its path, a repulsive field ensures the USV stays clear of shores, and a COLREGs-compliant field prevents collisions with other USVs. By accounting for dynamic constraints, EDWA generates predicted trajectories and optimally selects them based on the established potential fields.
On the other hand, various intelligent algorithms such as fuzzy logic proportion–integration–differentiation, optimal control theory, and neural networks have been applied in the design of berthing controllers to achieve precise berthing operations. In 2018, Im [
13] introduced a pioneering Artificial Neural Network (ANN) controller that employs a head-up coordinate system. This innovative approach integrates relative bearing and distance from the ship to the berth, effectively addressing the limitation of traditional ANN controllers confined to specific ports. Consequently, the necessity for retraining upon a ship’s arrival at a new port is mitigated. In 2019, Nguyen [
14] proposed a ship automatic berthing support system using fuzzy logic theory. This system employed three fuzzy controllers to accomplish the automatic berthing process, including longitudinal movement, stabilization of relative orientation error, and final dock guidance. In 2019, Zhang [
15] proposed an adaptive neural network control scheme suitable for the automated berthing process. This approach utilized an adaptive neural network method based on Navigation Dynamic Recurrent Information to reconstruct the overall uncertainty caused by unknown ship dynamics and external disturbances. Simultaneously, Dynamic Surface Control and Minimum Learning Parameter techniques were employed to alleviate the computational burden of the neural network. In 2020, Li [
16] proposed a method based on Nonlinear Model Predictive Control (NMPC) to address underactuated ships, aiming to automate the berthing process by providing optimal rudder angles and propeller speeds. At each sampling instant, a finite-time optimal control problem was formulated based on the nonlinear ship maneuvering model. In the design of the NMPC controller, a lexicographic multi-objective optimization strategy was introduced, reducing the workload of control parameter tuning. In 2021, Xiong [
17] employed a feedback-based direct motion control approach utilizing data on the ship’s relative distance and attitude to the berth coastline collected by microwave radar, achieving automated berthing of ships. Also, in 2021, Liu [
18] successfully implemented autonomous berthing of ships using a heuristic dynamic programming-based virtual navigation control strategy. In this method, the introduction of a virtual navigation ship enabled continuous alignment towards the destination, converting the berthing task into a ship tracking problem. Subsequently, the ship tracking problem was further transformed into an optimal control problem, and the heuristic dynamic programming method was introduced to solve this optimal control problem.
During ship navigation, significant variations occur in hydrodynamic coefficients, rendering the mathematical models highly uncertain and challenging to obtain real-time, accurate mathematical models [
19]. This challenge renders it difficult to achieve optimal algorithms requiring precise ship kinematic models in the aforementioned intelligent algorithms. Moreover, in berth path planning algorithms where the model is unknown, there is a lack of appropriate design for berthing velocity. Additionally, existing studies only guide the vessel to the berth without considering downstream and upstream berthing scenarios in actual berthing situations. These issues hinder the practical application of many intelligent berthing algorithms in real ship berthing processes. Therefore, addressing the design problem of downstream and upstream berthing paths in practical berthing scenarios, as well as planning the vessel’s speed during berthing to achieve safe and smooth berthing, this study proposes the Flow Matching Double Section Bezier Berth Method (FM-DSB) and Berthing Path Velocity Matching Method (BPVM). The main contributions of this paper are as follows:
- (1)
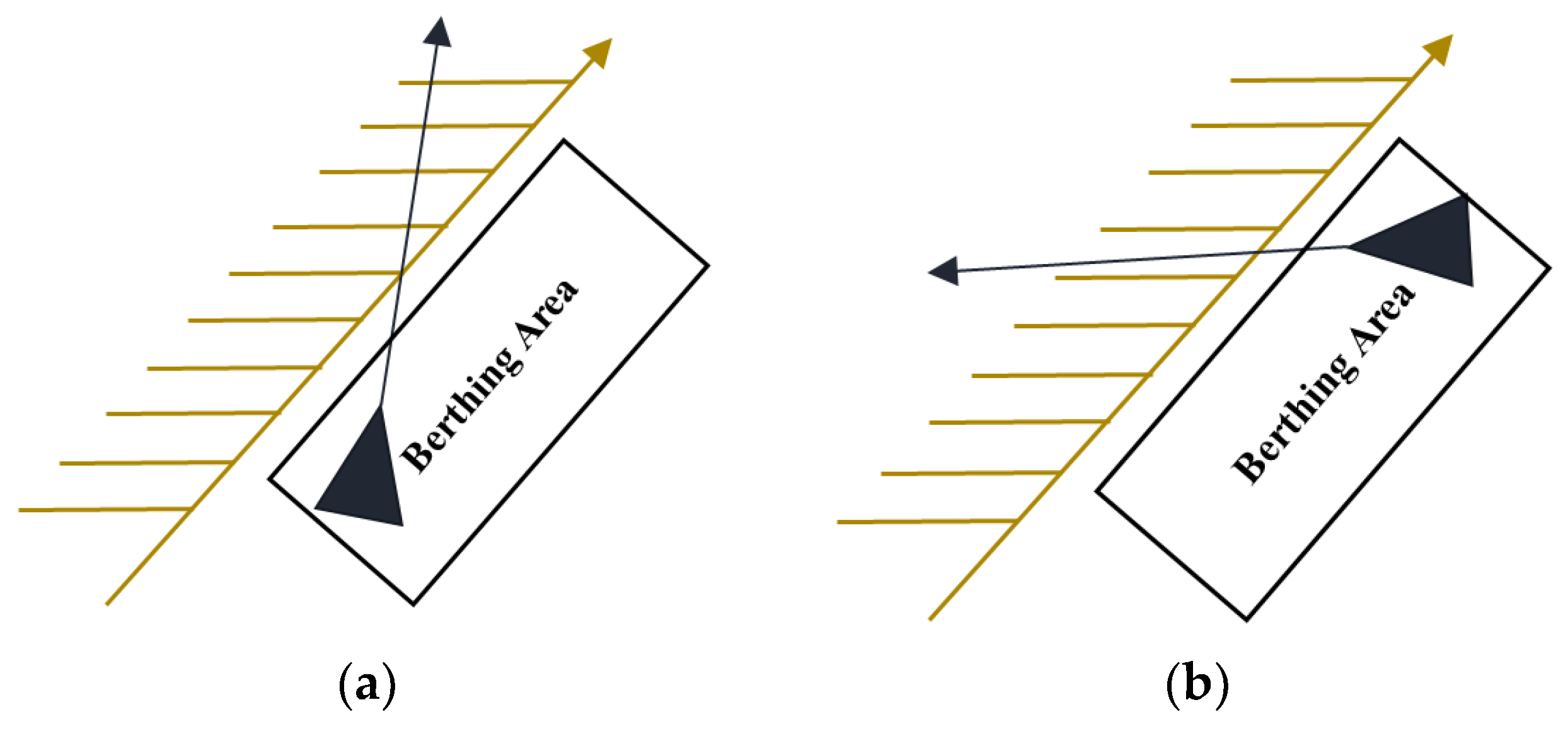
Considering the impact of vessel selection between downstream and upstream berthing modes on berthing route planning, the FM-DSB is proposed. This approach analyzes the relationship between water flow direction and berth position, combined with the berthing mode, to determine how the vessel enters the berth. Finally, the berthing path is planned using a two-stage Bezier curve. By splicing the two-stage Bezier curves, the vessel’s control system can better track the berthing path, while aligning the berthing operation more closely with practical operational habits.
- (2)
Based on the response of the vessel to rudder angle and propeller rotation speed, the vessel model is initially identified. With the model identification results as a reference, the acceleration and deceleration characteristics of the vessel are analyzed. The process of vessel speed variation is then compared with the berthing distance, facilitating velocity matching of the berthing path to achieve temporal coupling.
- (3)
Designing a dual-loop path tracking control system for ships using a sliding mode controller with strong adaptability to uncertainties in system structural parameters. This control system decomposes path tracking into a major-loop path-tracking controller and a minor-loop speed-heading tracking controller. Finally, based on the results of path planning, the feasibility and effectiveness of the berthing path are validated using the dual-loop path tracker.
The remainder of this paper is organized as follows: In
Section 2, the influence of downstream and upstream berthing selection on berthing path planning is analyzed. Combining with Bezier curves, the FM-DSB is proposed.
Section 3 focuses on model identification of vessels in a maritime simulator, obtaining vessel responses to the propeller and rudder inputs, thereby introducing the BPVM. In
Section 4, a dual-loop path tracking control system for vessel berthing process is implemented using sliding mode control and PID control.
4. Dual-Loop Path Tracking Control System
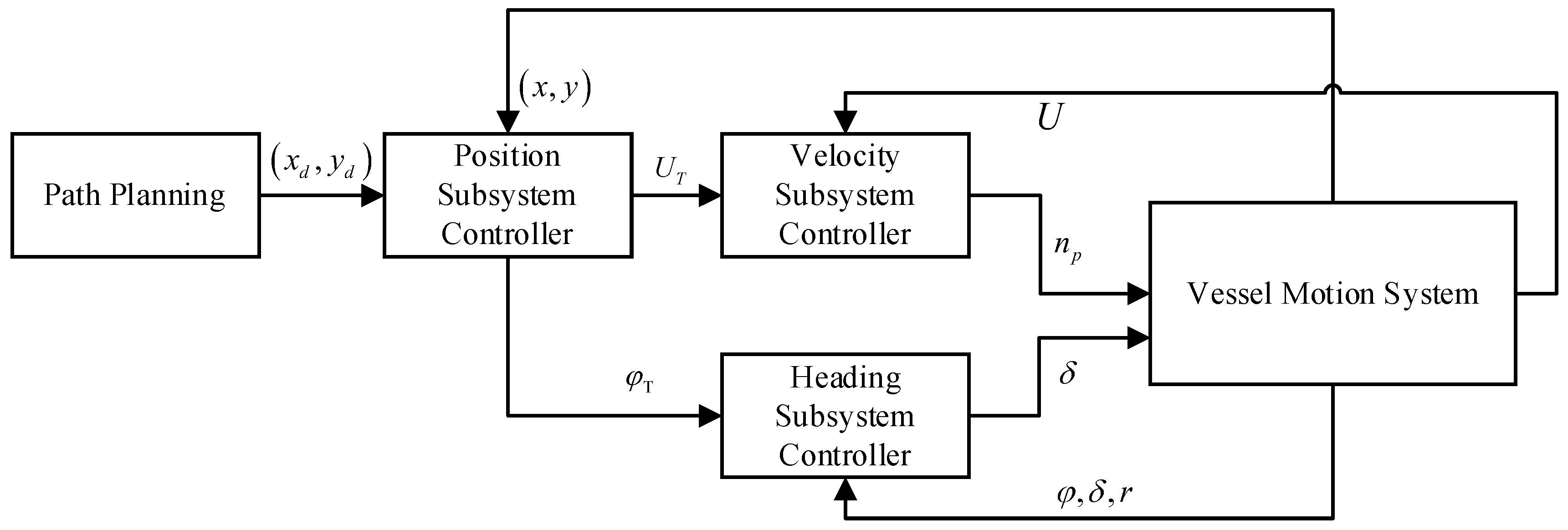
This paper presents a dual-loop path-tracking control system for tracking the position, velocity, and heading of a vessel. The control system diagram is shown in
Figure 9. The outer loop consists of the position tracking subsystem, while the inner loop consists of the velocity and heading tracking subsystems. The outer loop obtains the desired position
from the path planning module and generates intermediate command targets for velocity
and heading
. After the heading tracking subsystem in the inner loop obtains the target heading
, it generates the rudder angle change control command
using the sliding mode control to track the heading. After the velocity tracking subsystem in the inner loop obtains the desired velocity
, it generates propeller control commands
through PD control to track and control the velocity
.
The kinematic model of the vessel can be derived from Equations (6), (7), (10) and (11).
4.1. Position Tracking Control Subsystem
The position tracking control subsystem achieves the tracking of to solely by obtaining the desired position and designing a sliding mode control law. Equation (16) can be simplified to Equation (11):
The tracking error equations are given by Equation (18):
The sliding surfaces
and
are designed as shown in Equation (19):
Then, from Equations (18) and (19):
The control laws
and
are designed as shown in Equation (20):
Convergence analysis of the sliding surfaces
and
: Define a Lyapunov candidate function as shown in Equation (22):
Taking the derivative of Equation (22):
From Equations (20) and (21):
Substituting Equation (24) into Equation (23):
Therefore, the sliding surface converges to 0. Similarly, it can be proven that also converges to 0, which leads to the convergence of to .
When the control laws in the ideal trajectory control law of Equation (21) can be achieved, the values of
and
in Equation (17) correspond to the desired values of
and
for the ideal trajectory, and thus expressions for
and
can be derived as shown in Equation (26):
4.2. Heading Tracking Control Subsystem
The heading tracking control subsystem reduces the error between the heading angle and the target heading angle by designing a sliding mode controller to control the rate of change of the rudder angle .
The variables are defined as follows:
Taking the derivative of Equation (27):
The error equations are defined as:
The sliding surface is defined as:
The sliding mode reaching law is defined as:
Combining Equations (30) and (31), the sliding mode control law is derived as:
where
,
.
Convergence analysis of the sliding surface
: Define a Lyapunov candidate function as:
Taking the derivative of Equation (33):
From Equations (33) and (34):
Therefore, the sliding surface converges to 0, which leads to the convergence of to .
4.3. Velocity Tracking Control Subsystem
The task of the velocity tracking control system is to track the desired velocity quickly and accurately. In this paper, a PD controller is chosen for velocity tracking control.
The velocity tracking error is defined as:
Then, the desired velocity tracking PD control law is given by:
where
is the proportional coefficient and
is the derivative coefficient.
5. Results and Discussion
In this chapter, experiments were conducted on both long-distance and short-distance berthing to validate the effectiveness of the path-planning algorithm based on FM-DSB and BPVM. Based on the planning results, the feasibility and effectiveness of the berthing path were verified using a dual-loop path tracker.
The vessel parameters utilized in the simulation experiments are shown in
Table 2. The identified vessel motion model is depicted by Equation (38), with the parameters therein listed in
Table 3.
In the experiment, the range of vessel motion parameters was restricted. These motion state parameters are described by Equation (39), while the control parameters are defined by Equation (40).
In the experiment, when the vessel’s state simultaneously meets the following three conditions, it is considered that the vessel has completed the berthing task.
- (1)
The vessel sails into the rectangular berth area centered around the endpoint (EP), satisfying the positional parameter requirements specified by Equation (41).
- (2)
The vessel’s hull aligns approximately parallel to the berth while maintaining stability, indicating that the heading angle and yaw velocity
meet the requirements specified by Equation (42), where
represents the berth angle.
- (3)
The vessel’s speed meets the berthing conditions, meaning that the vessel’s speed satisfies the requirements specified by Equation (43).
The experiment is conducted using MATLAB R2023b on a desktop with a 48 GB DDR4 RAM, an AMD Ryzen 7 5800X 3.80 GHz CPU (Sunnyvale, CA, USA), a GeForce RTX 3080 GPU (NVIDIA, Santa Clara, CA, USA), and a 1 TB SSD hard drive.
5.1. Long-Distance Berthing Experiment
In this experimental section, the simulation environment is configured for a long-distance scenario. By designing the scene parameters, the berthing process of the vessel conforms to the motion process of “Acceleration-Constant Speed-Deceleration”. The start point is
and the berth end point is
. The initial heading is
. The direction of water flow is
. Based on the water flow direction, the BPVM method can calculate the direction of the coastline as
. The control point for the in-bound stage of the Bezier curve is set to
, and the control point for the in-moor stage is set to
. The expression for the control points is shown in Equation (44). Among these points, point
represents the start point, point
is a point extended along the initial heading by three times the ship’s length, point
is the berthing endpoint, point
is determined by extending the berthing stopping heading backwards by four times the ship’s length from the endpoint, and point
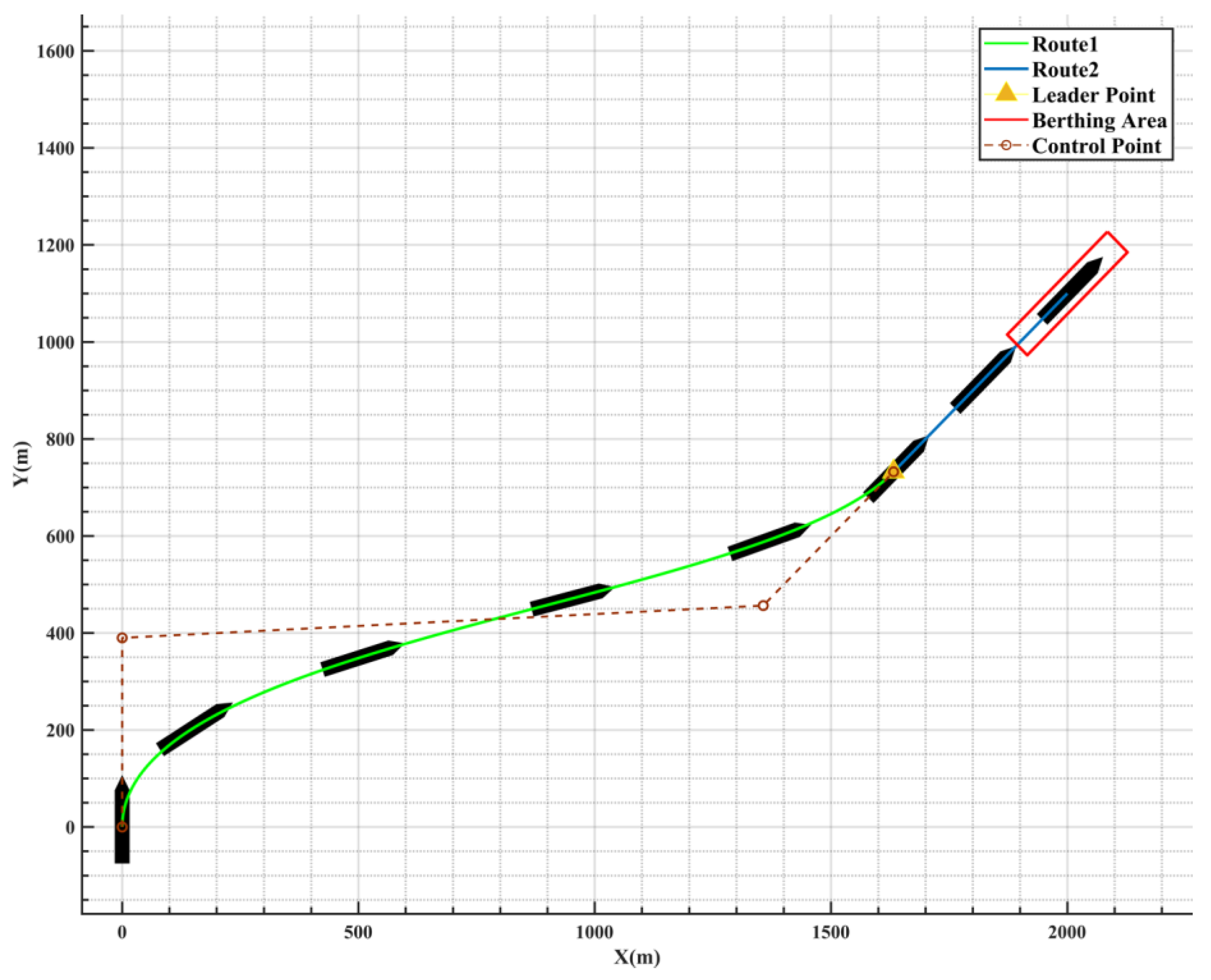
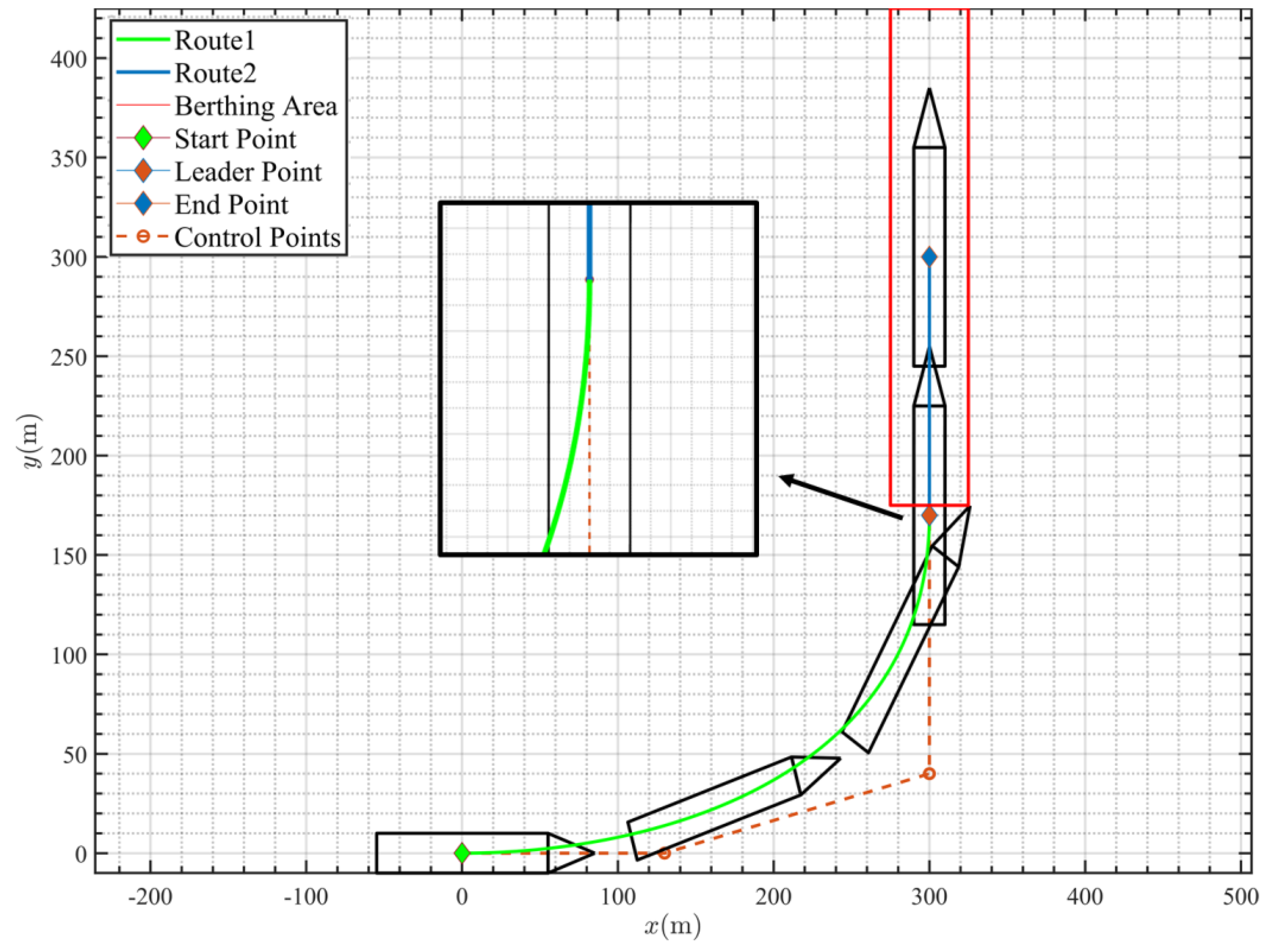
is determined by extending the berthing stopping heading backwards by seven times the ship’s length from the endpoint. The upstream berthing path is depicted in
Figure 10, while the downstream berthing path is shown in
Figure 11. The green curve (Route1) represents the in-bound stage berthing curve fitted with a third-order Bezier curve, while the red curve (Route2) represents the in-moor stage berthing curve fitted with a first-order Bezier curve. The red diamond marks the junction between the two Bezier segments, the green diamond represents the starting point, the blue diamond indicates the berthing endpoint, and the red dashed line represents the control points connecting the in-bound stage Bezier berthing curve. Since the slopes at the endpoints of third-order Bezier curves are equal to the slopes of the lines connecting the most adjacent control points, ensuring smoothness at the intersection of two Bezier curves can be achieved by adjusting the control point slopes of the third-order Bezier curve. The junction in
Figure 10 and
Figure 11 is magnified to facilitate the observation of the smoothness of the connection points of the two-segment Bezier curves. BPVM method is utilized to perform velocity matching on the berthing path. The matched results are shown in
Figure 12. The blue curve and the green curve represent the velocity change curves for downstream berthing and upstream berthing, respectively, while the pink and orange dashed lines depict the corresponding propeller rotation speed curves for the berthing processes. According to
Figure 12, the acceleration process of downstream berthing and upstream berthing is the same. At
, they reach the maximum speed
. However, due to the longer distance for upstream berthing, the duration of the constant phase is longer. At
, upstream berthing enters the deceleration stage. At this moment, the propeller rotation speed is adjusted to
, and the berthing task concludes at
. Meanwhile, downstream berthing adjusts the propeller rotation speed to
at
and enters the deceleration stage, ultimately concluding the berthing task at
.
After obtaining the berthing path and matching velocity, the dual-loop path control system is utilized to track the desired path. The control system parameters are shown in
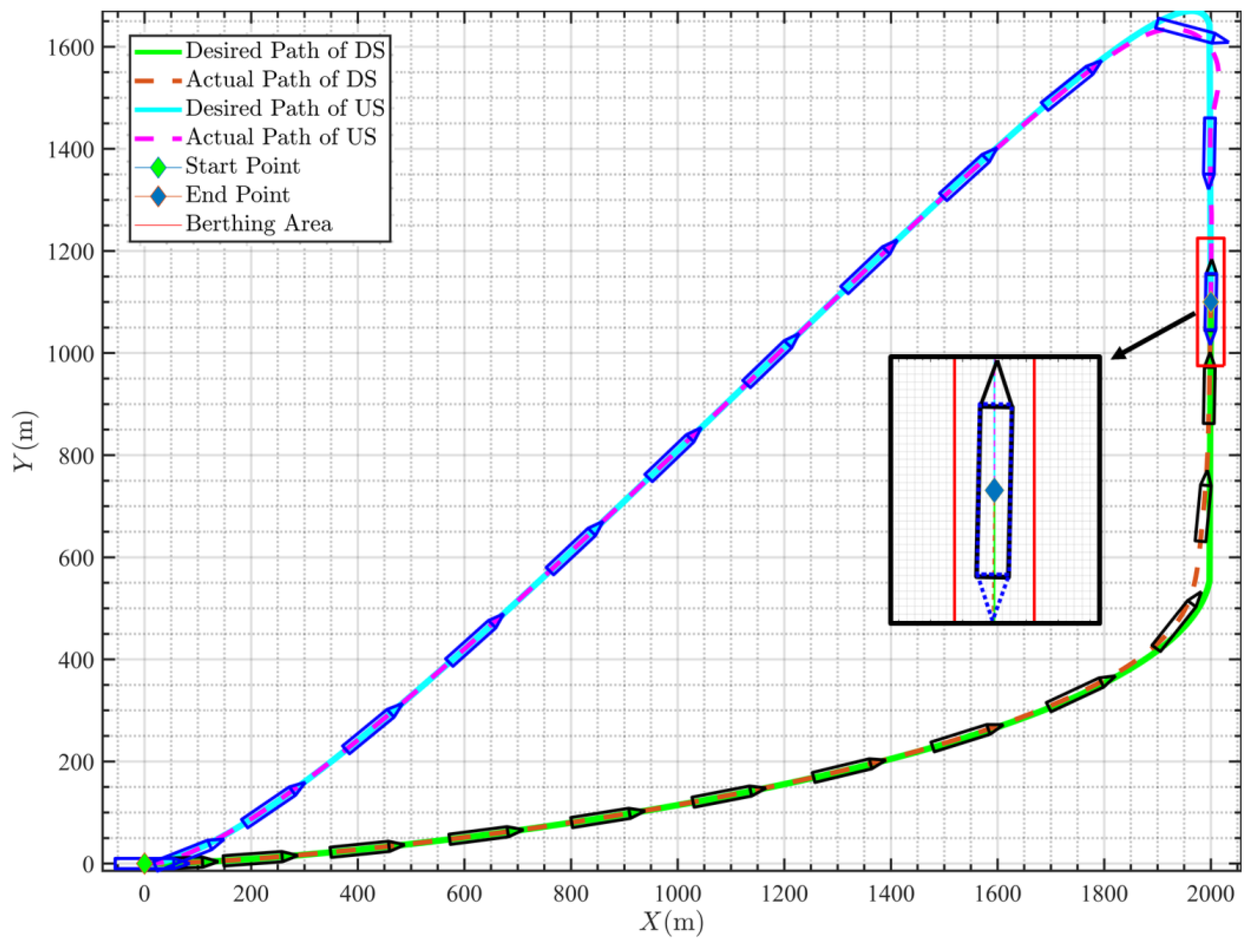
Table 4. The path-tracking performance is shown in
Figure 13. The solid green and cyan lines, respectively, represent the desired paths
for downstream and upstream berthing, while the dashed red and pink lines depict the actual berthing curve
obtained from the simulation. Comparing the two curves, it can be observed that the dual-loop path tracking control system effectively tracked the target path and successfully completed the berthing task. To clearly observe the vessel’s attitude at the end of berthing, the endpoint position is magnified, as shown in
Figure 13. From the magnified section, it can be observed that at the termination of the berthing task, the ship’s hull is nearly parallel to the berth, with the ship’s center positioned near the endpoint. For a clearer observation of the tracking effectiveness of the dual-loop tracking control system,
Figure 14 displays the temporal tracking graph of the position, it can be observed from the graph that despite some temporal delay in position tracking, at the conclusion of the berthing task, the vessel’s position
closely aligns with the desired position
.
The tracking performance of the vessel’s velocity is illustrated in
Figure 15. The green and pink dashed lines, respectively, represent the desired velocity
output by the BPVM method for downstream and upstream berthing. The red and blue solid lines represent the target velocity output by the position tracking subsystem. The cyan and black solid lines represent the actual vessel’s velocity curves. The yellow and purple solid lines represent the propeller rotation speed during the downstream and upstream berthing processes, respectively. From the graph, it can be observed that despite some oscillation in propeller rotation speed during the acceleration and deceleration phases, the velocity variation curve remains smooth. However, during the constant velocity phase, there exists a certain static deviation between the actual velocity
and desired velocity
. This is attributed to the absence of an integral component in the design of the velocity controller, preventing error accumulation and resulting in a static speed deviation. Nonetheless, this is intentional within this study, as maintaining the desired position (
Xd,
Yd) ahead of the vessel’s position
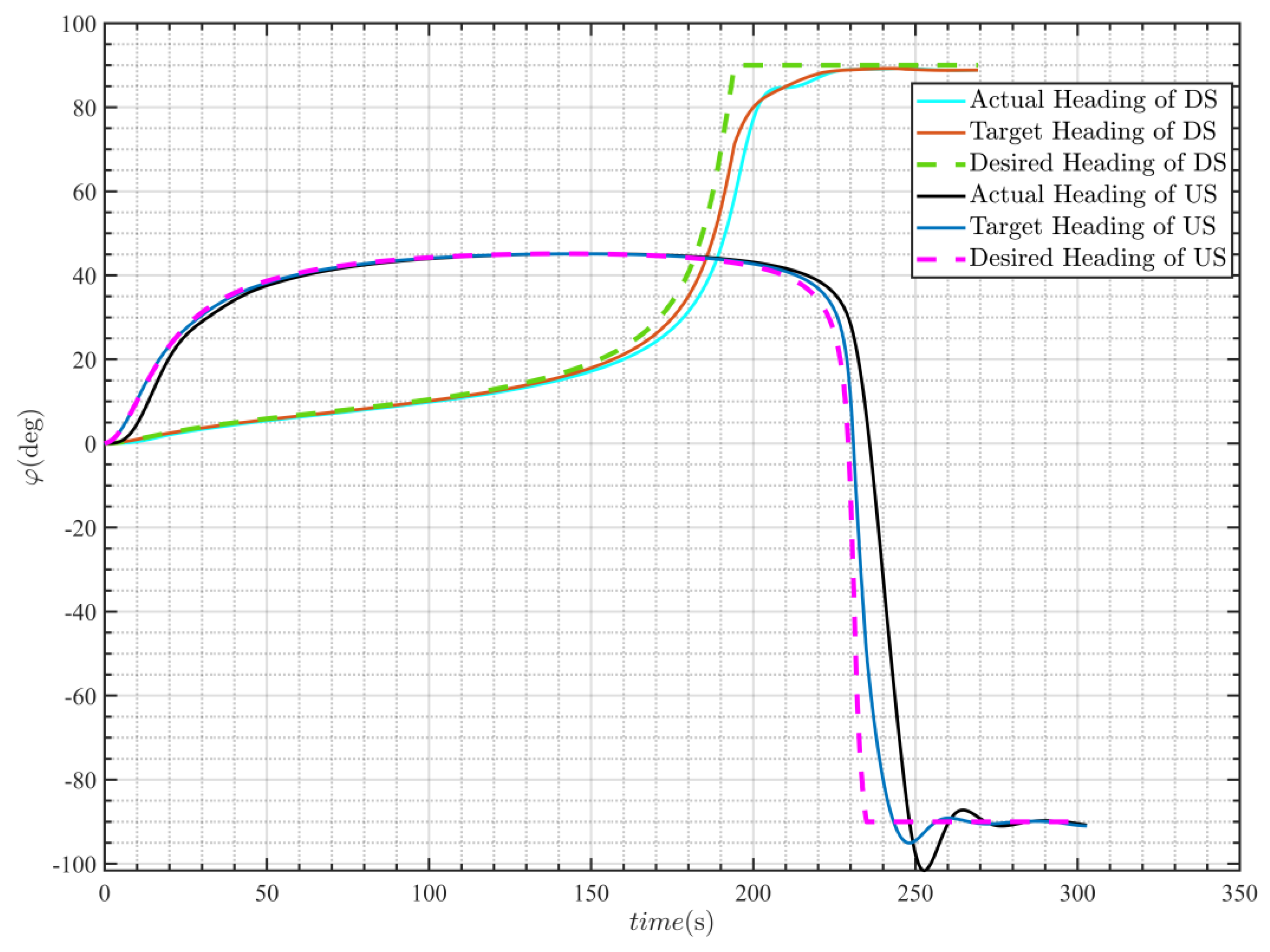
throughout the berthing task is advantageous for the stability of the control system. Similarly, the comparison between the desired heading
, target heading
, and actual heading
is illustrated in
Figure 16. The temporal variation curves of rudder angle
and yaw velocity
for downstream and upstream berthing are shown in
Figure 17. From
Figure 16 and
Figure 17, it can be inferred that upon completing the final berthing task, the vessel’s heading aligns closely with the berth, with the rudder angle and yaw velocity essentially at 0. This indicates that immediately after the conclusion of the berthing task, the vessel’s heading remains relatively stable without significant changes.
5.2. Short-Distance Berthing Experiment
In this experimental section, the simulation environment was configured for a short-distance scenario. By designing the scenario parameters, the berthing process of the vessel conforms to an “Acceleration-Deceleration” motion sequence. The starting point coordinates were set as , and the berth endpoint coordinates were defined as . The water flow direction was set as . Based on this flow direction, the BPVM algorithm determined the coastline direction as . During downstream berthing, the heading of the vessel entering the berth was set as , while during upstream berthing, the heading of the vessel entering the berth should be .
In a short-distance scenario, where the starting point and the endpoint are relatively close, adjustments were made to the initial headings and Bezier curve control points for downstream and upstream berthing experiments to ensure the smooth completion of the berthing task. This was performed to avoid potential challenges arising from the physical limitations of unmanned vessels, which may hinder effective tracking of the desired trajectory when curvature becomes excessive. In the upstream berthing scenario, as depicted in
Figure 18, the vessel’s initial heading is set to
, with the control point equation given by Equation (45). Conversely, in the downstream berthing scenario, illustrated in
Figure 19, the vessel’s initial heading is
, and the control point equation remains consistent with Equation (46). Similar to the method used for setting control points in the previous section, the control points for short-distance berthing in this section are also determined based on the initial and final headings, with a certain distance equivalent to the ship’s length. Additionally, the junction in
Figure 18 and
Figure 19 has also been magnified in the figures to facilitate the observation of the smoothness of the connection points of the two-segment Bezier curves.
Similar to the long-distance berthing experiment, the velocity profile after matching is illustrated in
Figure 20. In downstream berthing, the vessel accelerates at a propeller rotation speed of
until
, after which the propeller rotation speed is adjusted to
to initiate the deceleration phase. The downstream berthing task concludes at
In upstream berthing, the vessel accelerates at a propeller rotation speed of
until
, following which the propeller rotation speed is adjusted to
. Finally, the upstream berthing task concludes at
.
Similar to the previous section, after obtaining the berthing path and matched velocities for short distances, the dual-loop path tracking control system was utilized to track the desired trajectory. The parameters of the control system are outlined in
Table 5. The path-tracking performance for close-range berthing is illustrated in
Figure 21. From the graph, it can be observed that even in short-distance berthing scenarios, the dual-loop path control system is capable of effectively tracking the desired position
. Even in locations with smaller turning radii, the system manages to guide the vessel along the expected path, and at the conclusion of the berthing task, the vessel’s heading is essentially parallel to the berth.
Figure 22 depicts the temporal tracking graph of the vessel’s position, while
Figure 23 presents the temporal tracking graph of the vessel’s heading.
Figure 24 showcases the tracking performance of the vessel’s speed and the control input of the propeller rotation speed during the berthing process. From the graph, it is evident that there remains a certain static deviation between the actual velocity
and the desired velocity
. Additionally, during the deceleration phase, the propeller rotation velocity does not maintain a constant
but gradually transitions from around
to
. This results in a longer duration for the vessel to decelerate in the actual scenario. Finally,
Figure 25 displays the temporal variation curves of the rudder angle and yaw velocity.
5.3. Discussion
In the first two sections of this chapter, experiments were conducted on both short-distance and long-distance berthing experiments. The experimental findings demonstrate that, concerning path planning, analysis of the vessel’s adherence to the desired trajectory in
Figure 13 and
Figure 21 reveals the effectiveness of the FM-DSB algorithm proposed herein, not only in facilitating berth path planning but also in ensuring the smooth and traceable nature of the paths. In terms of velocity planning during the berthing process, examination of the vessel’s propeller and speed response curves in
Figure 15 and
Figure 24 reveals that the BPVM algorithm proposed in this paper can effectively plan the vessel’s velocity, enabling it to accomplish the berthing task quickly and efficiently. In contrast to velocity planning algorithms based on empirical [
5,
23] or residual distance [
1,
6] methods, the proposed BPVM algorithm in this paper is tailored to better align with the acceleration and deceleration traits of vessels. The ability to adjust the propeller to negative thrust facilitates quicker berthing. Additionally, the devised berthing algorithm BPVM and FM-DSB demonstrate exceptional real-time performance. As shown in
Table 6, this study conducted ten berthing simulation experiments for both short-distance and long-distance upstream and downstream berthing scenarios. The time consumed by the BPVM and FM-DSB algorithm to compute the berthing path was recorded. From
Table 6, it can be observed that the time required for all scenarios’ simulation experiments is concentrated around 0.04 s. Such low computational overhead is attributed to the utilization of Bezier curves and velocity-matching techniques, which avoid intricate error estimation or iterative computations.
5.4. Limitations and Future Works
In port environments, despite the presence of structures like breakwaters to mitigate the impact of waves and currents, ships performing berthing maneuvers within harbors often operate at low speeds, rendering them more susceptible to environmental disturbances such as wind and waves. Therefore, when studying berthing tasks, it is essential to consider environmental disturbances. However, in this research, the consideration of environmental disturbances affecting ships has been limited. Although the dual-loop control system constructed in this study employs robust sliding mode control, for comprehensive consideration of environmental disturbances affecting ships, further research is warranted to investigate the dynamics of ship models.
Additionally, in this study, the distinct responses of vessels to propeller forward and reverse rotations are taken into consideration, necessitating the adjustment of system models during simulations based on the propeller’s rotation status. However, instantaneous model switches in MATLAB/Simulink R2023bsimulations may cause integration calculation errors within the software. To facilitate smooth transitions between propeller response models during simulations, a delay module is introduced between the speed controller submodule and the vessel model submodule in this paper. Because this module introduces a delay in obtaining vessel state information for the controller, it leads to oscillations in the generated control quantities. Moreover, the oscillation problem is exacerbated during model switches, particularly during the deceleration phase.
Based on the aforementioned considerations, we anticipate making progress in the following three areas in the future:
- (a)
Studying the response of ships to disturbances caused by wind, waves, and currents during operations within harbors, and devising algorithms to mitigate the effects of environmental disturbances on berthing tasks.
- (b)
Conducting research on ship dynamics models, applying the algorithm proposed in this paper to the MMG model, and thoroughly considering the interplay between the ship’s propellers, rudder, and hull to accurately depict ship motion.
- (c)
Migrating the simulation environment of the algorithm from MATLAB/Simulink to the C++ environment to mitigate issues related to switching ship models, and to prepare for real ship experiments.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}