
A Weakly Nonlinear System for Waves and Sheared Currents over Variable Bathymetry


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Weakly Nonlinear Coupled-Mode System
2.1. Decomposition of the Perturbative Field in a Local-Mode Series
2.2. Momentum Equations
2.3. A Weakly Nonlinear Coupled-Mode System
3. Nonlinear Solutions of Steady Traveling Waves and Sheared Currents in Constant Depth
3.1. Solution Based on Fourier Modal Expansion Method
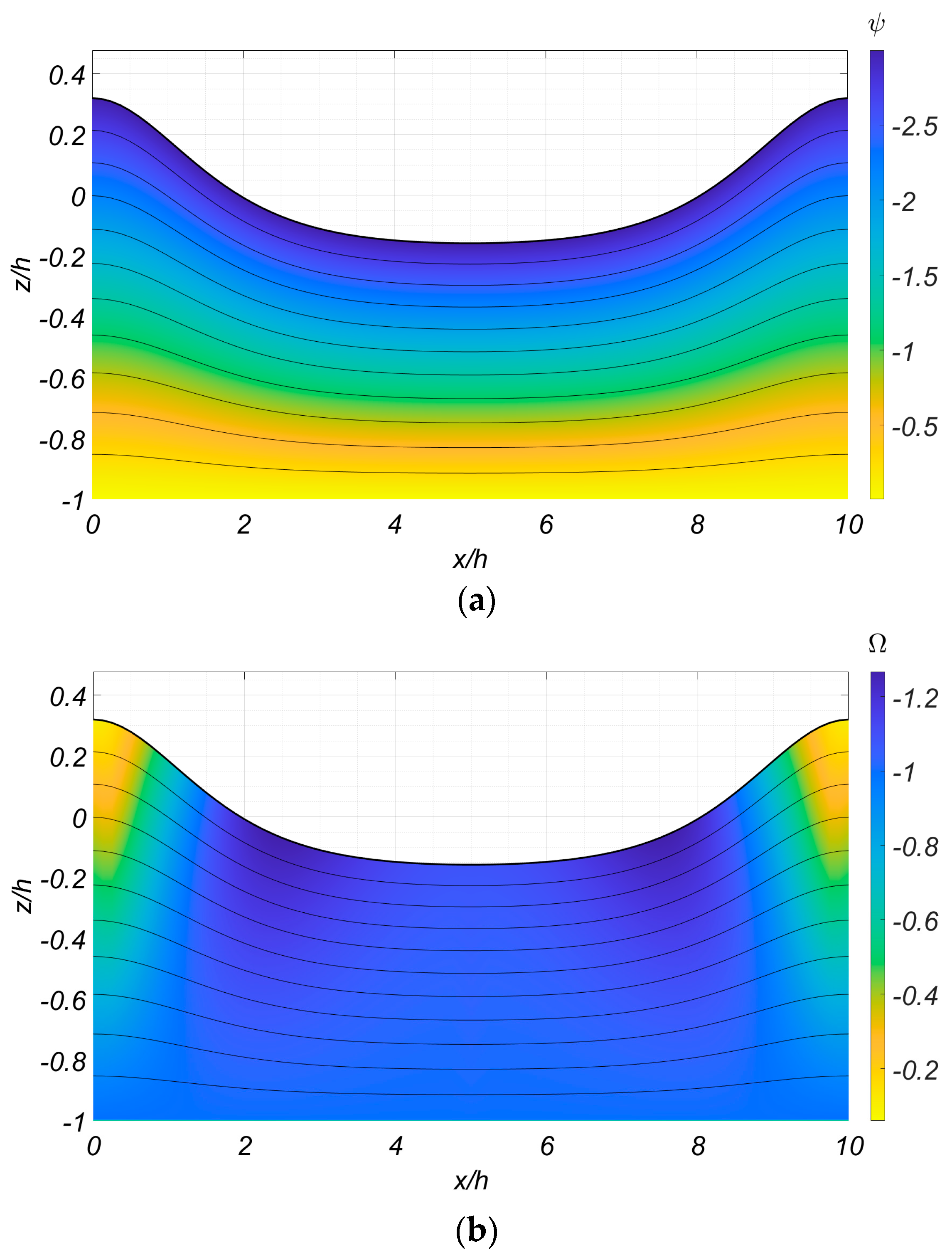
3.2. Examples of Fields and Dispersion Relation Characteristics
3.3. Projection of the Fully Nonlinear Solution on a CMS Basis
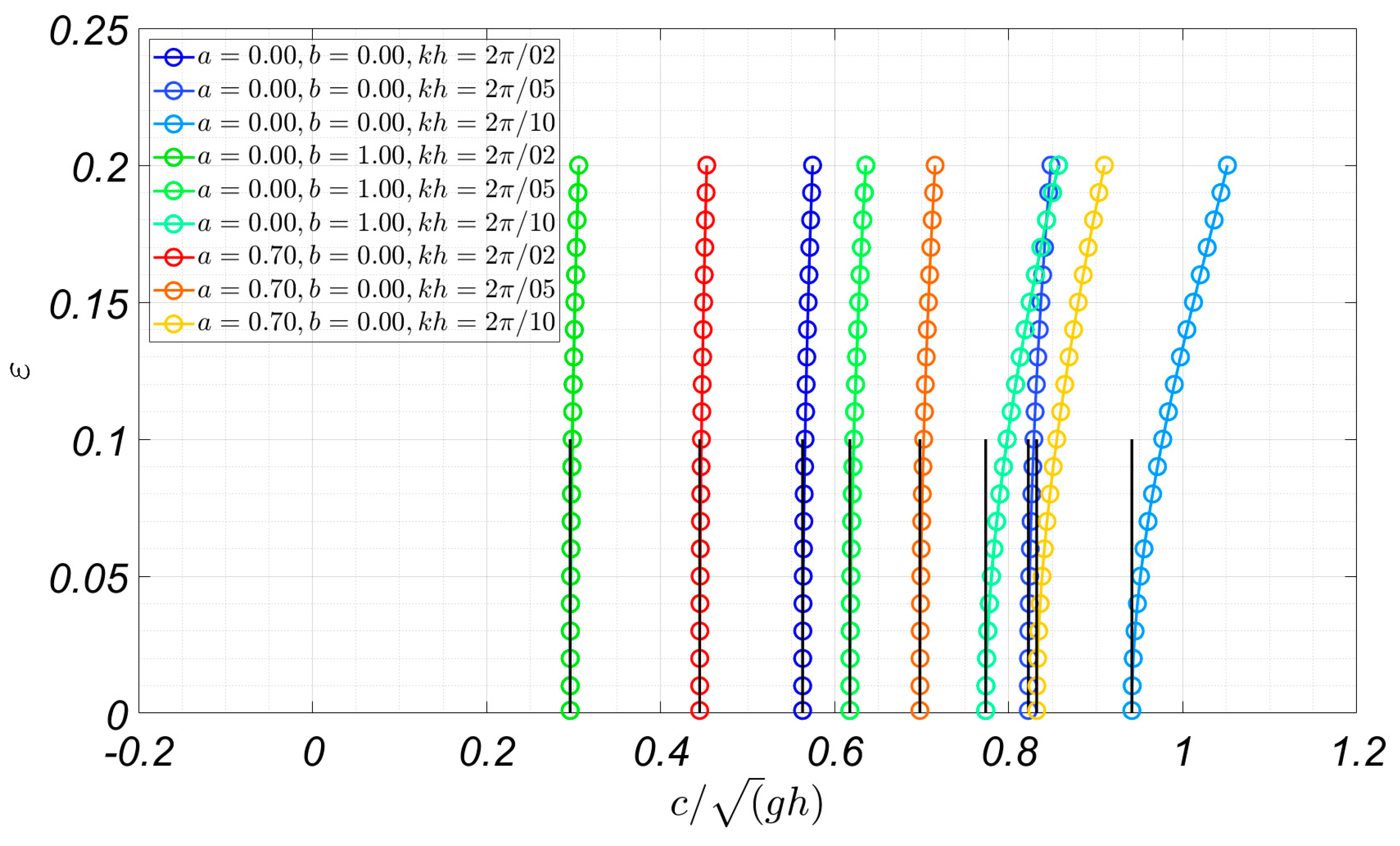
3.4. Phase Velocity of the Nonlinear Waves
4. Weakly Nonlinear Propagation over Varying Depth and Currents
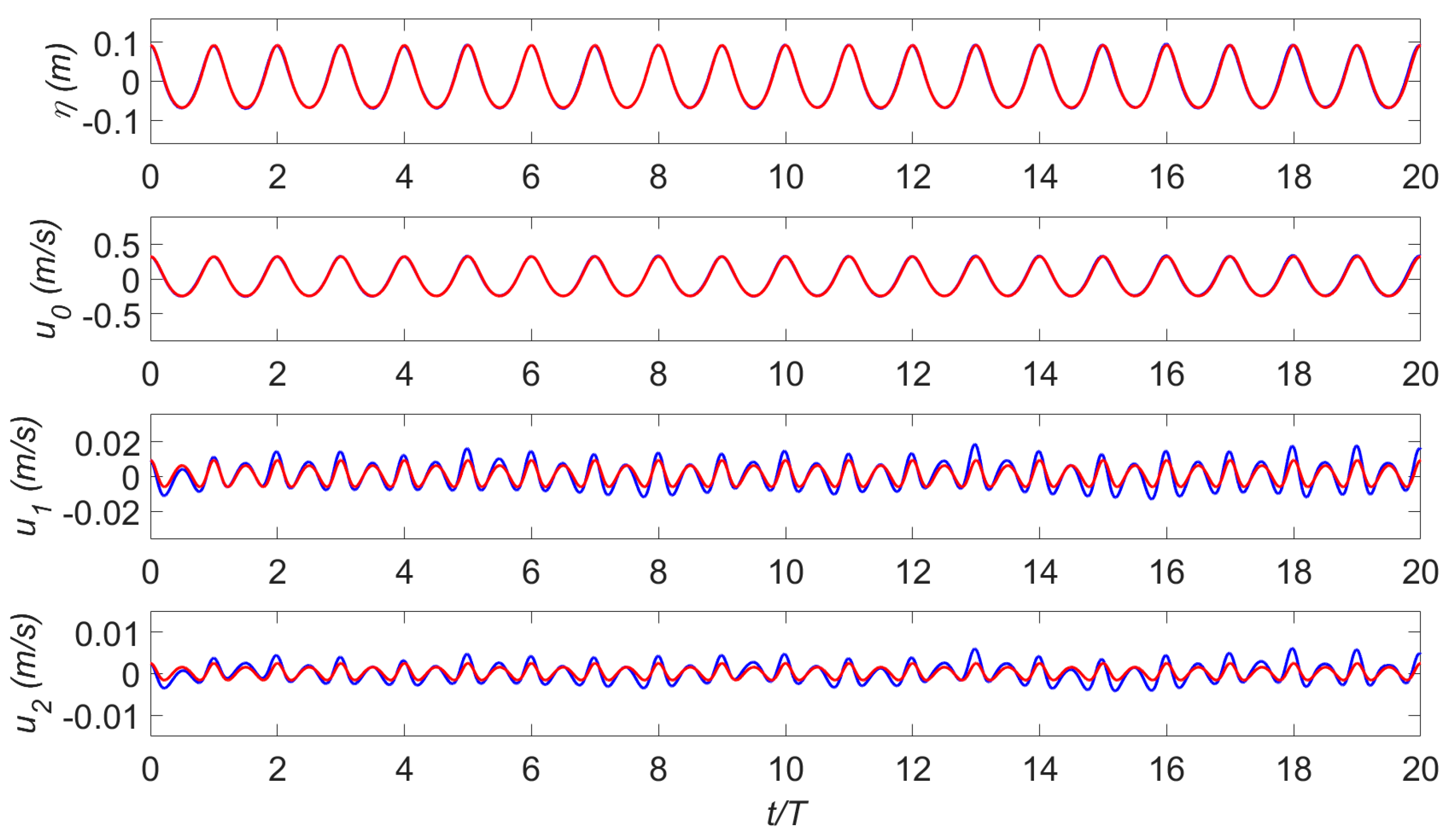
4.1. Initialization of the CMS and Comparison with the Fully Nonlinear Method
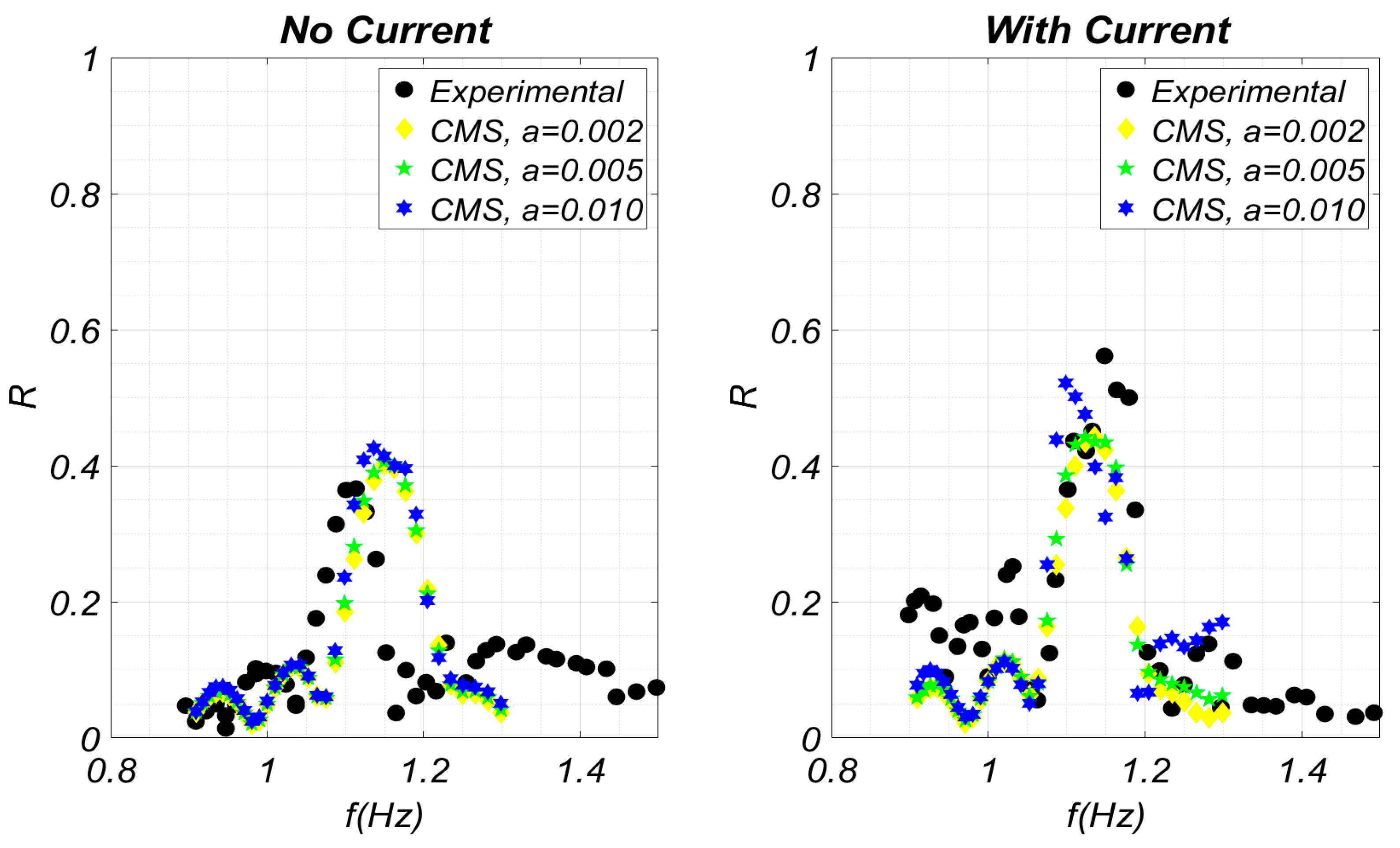
4.2. Wave Propagation over Rippled Bed in the Presence of Shear Current
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Expansion of the Momentum Equations on the Basis
Appendix B. Detailed Expression of the Coefficients
References
- Rey, V.; Charland, J.; Touboul, J. Wave—Current interaction in the presence of a 3D bathymetry: Deep water wave focusing in opposite current conditions. Phys. Fluids 2014, 26, 096601. [Google Scholar] [CrossRef]
- Haas, K.A.; Svendsen, I.A. Laboratory measurements of the vertical structure of rip currents. J. Geophys. Res. 2002, 107, 15-1–15-19. [Google Scholar] [CrossRef]
- Furgerot, L.; Sentchev, A.; Bailly-du-bois, P.; Lopez, G.; Morillon, M.; Poizot, E.; Méar, Y.; Bennis, A.C. One year of measurements in Alderney Race: Preliminary results from database analysis. Phil. Trans. R. Soc. A 2020, 378, 20190625. [Google Scholar] [CrossRef] [PubMed]
- Kharif, C.; Abid, M. Miles theory revisited with constant vorticity in water of infinite depth. J. Mar. Sci. Eng. 2020, 8, 623. [Google Scholar] [CrossRef]
- Zhang, X.; Simons, R.; Zheng, J.; Zhang, C. A review of the state of research on wave-current interaction in nearshore areas. Ocean Eng. 2022, 243, 110202. [Google Scholar] [CrossRef]
- Nwogu, O.G. Interaction of finite-amplitude waves with vertically sheared current fields. J. Fluid Mech. 2009, 627, 179–213. [Google Scholar] [CrossRef]
- Zhang, J.S.; Zhang, Y.; Jeng, D.S.; Liu, P.L.F.; Zhang, C. Numerical simulation of wave–current interaction using a RANS solver. Ocean Eng. 2014, 75, 157–164. [Google Scholar] [CrossRef]
- Gao, J.; Zhou, X.; Zhou, L.; Zang, J.; Chen, H. Numerical investigation on effects of fringing reefs on low-frequency oscillations within a harbor. Ocean Eng. 2019, 172, 86–95. [Google Scholar] [CrossRef]
- Marino, M.; Faraci, C.; Musumeci, R.E. Shoaling waves interacting with an orthogonal current. J. Mar. Sci. Eng. 2020, 8, 281. [Google Scholar] [CrossRef]
- Kang, A.; Zhu, B.; Lin, P.; Ju, J.; Zhang, J.; Zhang, D. Experimental and numerical study of wave-current interactions with a dumbbell-shaped bridge cofferdam. Ocean Eng. 2020, 210, 107433. [Google Scholar] [CrossRef]
- Yang, Z.; Huang, B.; Kang, A.; Zhu, B.; Han, J.; Yin, R.; Li, X. Experimental study on the solitary wave-current inter action and the combined forces on a vertical cylinder. Ocean Eng. 2021, 236, 109569. [Google Scholar] [CrossRef]
- Faraci, C.; Musumeci, R.; Marino, M.; Ruggeri, A.; Carlo, L.; Jensen, B.; Foti, E.; Barbaro, G.; Elsaßer, B. Wave- and current-dominated combined orthogonal flows over fixed rough beds. Cont. Shelf Res. 2021, 220, 104403. [Google Scholar] [CrossRef]
- Massel, S. Extended refraction-diffraction equations for surface waves. Coast. Eng. 1993, 19, 97–126. [Google Scholar] [CrossRef]
- Chamberlain, P.G.; Porter, D. The modified mild-slope equation. J. Fluid Mech. 1995, 291, 393–407. [Google Scholar] [CrossRef]
- Raoult, C.; Benoit, M.; Yates, M. Validation of a fully nonlinear and dispersive wave model with laboratory non-breaking experiments. Coast. Eng. 2016, 114, 194–207. [Google Scholar] [CrossRef]
- Belibassakis, K.A.; Athanassoulis, G.A. A coupled-mode system with application to nonlinear water waves propagating in finite water depth and in variable bathymetry regions. Coast. Eng. 2011, 58, 337–350. [Google Scholar] [CrossRef]
- Booij, N. Gravity Waves on Water with Non-Uniform Depth and Current. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1981. [Google Scholar]
- Liu, P.L.F. Wave–current interactions on a slowly varying topography. J. Geophys. Res. 1983, 88, 4421–4426. [Google Scholar] [CrossRef]
- Kirby, J.T. A note on linear surface wave–current interaction over slowly varying topography. J. Geophys. Res. 1984, 89, 745–747. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, P. Depth-integrated wave–current models. Part 1. Two-dimensional formulation and applications. J. Fluid Mech. 2020, 883, A4. [Google Scholar] [CrossRef]
- Duan, W.Y.; Wang, Z.; Zhao, B.B.; Ertekin, R.C.; Yang, W.Q. Steady solution of solitary wave and linear shear current interaction. Appl. Math. Model. 2018, 60, 354–369. [Google Scholar] [CrossRef]
- Touboul, J.; Charland, J.; Rey, V.; Belibassakis, K. Extended Mild-Slope equation for surface waves interacting with a vertically sheared current. Coast. Eng. 2016, 116, 77–88. [Google Scholar] [CrossRef]
- Belibassakis, K.; Touboul, J.; Laffitte, E.; Rey, V. A Mild-Slope System for Bragg Scattering of Water Waves by Sinusoidal Bathymetry in the Presence of Vertically Sheared Currents. J. Mar. Sci. Eng. 2019, 7, 9. [Google Scholar] [CrossRef]
- Belibassakis, K.; Touboul, J. A Nonlinear Coupled-Mode Model for Waves Propagating in Vertically Sheared Currents in Variable Bathymetry—Collinear Waves and Currents. Fluids 2019, 4, 61. [Google Scholar] [CrossRef]
- Rienecker, M.; Fenton, J. A Fourier approximation method for steady water waves. J. Fluid Mech. 1981, 104, 119–137. [Google Scholar] [CrossRef]
- Francius, M.; Kharif, C. Two-dimensional stability of finite-amplitude gravity waves on water of finite depth with constant vorticity. J. Fluid Mech. 2017, 830, 631–659. [Google Scholar] [CrossRef]
- Coddington, E.A.; Levinson, N. Theory of Ordinary Differential Equations; McGraw Hill: New York, NY, USA, 1955. [Google Scholar]
- Boyd, J. Chebyshev and Fourier Spectral Methods; Dover Publications: New York, NY, USA, 2001. [Google Scholar]
- Dingemans, M. Water Wave Propagation over Uneven Bottoms; World Scientific: Singapore, 1997. [Google Scholar]
- Okamoto, H.; Shõji, M. The Mathematical Theory of Permanent Progressive Water-Waves; Advanced Series in Nonlinear Dynamics; World Scientific: Singapore, 2001. [Google Scholar]
- Li, Y.; Ellingsen, S. A Framework for Modeling Linear Surface Waves on Shear Currents in Slowly Varying Waters. J. Geophys. Res. 2019, 124, 2527–2545. [Google Scholar] [CrossRef]
- Domermuth, D.G. The initialization of nonlinear waves using an adjustment scheme. Wave Motion 2000, 32, 307–317. [Google Scholar] [CrossRef]
- Mei, C.-C. Resonant reflection of surface water waves by periodic sandbars. J. Fluid Mech. 1985, 152, 315–335. [Google Scholar] [CrossRef]
- Tang, H.-J.; Huang, C.-C. Bragg reflection in a fully nonlinear numerical wave tank based on boundary integral equation method. Ocean Eng. 2008, 35, 1800–1810. [Google Scholar] [CrossRef]
- Peng, J.; Tao, A.-F.; Fan, J.; Zheng, J.-H.; Liu, Y.-M. On the Downshift of Wave Frequency for Bragg Resonance. China Ocean Eng. 2022, 36, 76–85. [Google Scholar] [CrossRef]
- Gao, J.; Ma, X.; Dong, G.; Chen, H.; Liu, Q.; Zang, J. Investigation on the effects of Bragg reflection on harbor oscillations. Coast. Eng. 2021, 170, 103977. [Google Scholar] [CrossRef]
- Gao, J.; Shi, H.; Jun Zang, J.; Liu, Y. Mechanism analysis on the mitigation of harbor resonance by periodic undulating topography. Ocean Eng. 2023, 281, 114923. [Google Scholar] [CrossRef]
- Raj, R.; Guha, A. On Bragg resonances and wave triad interactions in two-layered shear flows. J. Fluid Mech. 2019, 867, 482–515. [Google Scholar] [CrossRef]
- Laffitte, E.; Rey, V.; Touboul, J.; Belibassakis, K. Water wave scattering by sinusoidal bed in the presence of vertically sheared current. Appl. Ocean Res. 2021, 108, 102549. [Google Scholar] [CrossRef]
- Chen, H.; Zou, Q. Effects of following and opposing vertical current shear on nonlinear wave interactions. Appl. Ocean Res. 2019, 89, 23–35. [Google Scholar] [CrossRef]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Touboul, J.; Morales-Marquez, V.; Belibassakis, K. A Weakly Nonlinear System for Waves and Sheared Currents over Variable Bathymetry. J. Mar. Sci. Eng. 2024, 12, 509. https://doi.org/10.3390/jmse12030509
Touboul J, Morales-Marquez V, Belibassakis K. A Weakly Nonlinear System for Waves and Sheared Currents over Variable Bathymetry. Journal of Marine Science and Engineering. 2024; 12(3):509. https://doi.org/10.3390/jmse12030509
Chicago/Turabian StyleTouboul, Julien, Veronica Morales-Marquez, and Kostas Belibassakis. 2024. "A Weakly Nonlinear System for Waves and Sheared Currents over Variable Bathymetry" Journal of Marine Science and Engineering 12, no. 3: 509. https://doi.org/10.3390/jmse12030509