3.2. Cavity Size Estimate
A challenging task when dealing with cavitating flows is to reliably assess the cavity size. This not only relates to the extension of the vapor cavity, but also to its stability over time. In this section, we demonstrate how the chosen methodology allows for a reliable estimate of the three-dimensional extension of the cavitating flow regions. We recall that, when the LDV measurement volume is inside a solid body, such as the propeller or a vapor-filled region, no data samples are collected. The absence of the Doppler signal is due to the lack of seeding particles in the vapor-filled regions, as well as to the misalignment of the LDV laser beams when crossing the water–vapor interface due to refraction.
By comparing the LDV results between the non-cavitation and cavitation cases, it is possible to assess the cavity extension. This principle is schematized in
Figure 7, where the number
S, defined as the average number of samples per slot, is shown versus the angular position
for the three tested
values. These data were obtained at the radial position
and downstream location
(corresponding to plane 3) and serve as an example of the methodology approach applicable at any measurement point.
Given the three-blade geometry of the propeller, the samples’ trend features a periodic pattern along the entire angle range. An interval, approximately between and , is characterized by a drop of S down to a null value, with the extension of the drop depending on . At the lower end of the interval, as depicted in the left inset, the steep decrease from the average level of samples (i.e., ) to null occurs regardless of the cavitation number, indicating that the drop is caused by the measurement volume intersecting the propeller blade, specifically the blade pressure side. Since the number of collected samples is directly related to the flow speed within the measurement volume, the steep drop, covering approximately a two-degree span, is associated with the boundary layer over the blade surface. At the higher end of the interval, the behavior varies depending on , as better highlighted in the right inset. For non-cavitating conditions, the rise in the number of acquired samples indicates that the acquisition volume is leaving the back of the blade. On the other hand, the recovery from in the case of occurs 19° later than the higher cases. This indicates that the measurement volume is crossing the cavity along an interval spanning 19°, based on the data resolution. Furthermore, since no valid sample was acquired for these points over the measurement time, it follows that the cavity is quite stable, and a reliable assessment of its size may be directly obtained.
Since the probe volume has a finite size, we point out that it could intersect partially the propeller/cavity, resulting in a decrease in the number of recorded samples. The accuracy on the identification of the cavity border is then strictly related to the size of the measurement probe volume and to the chosen slot size. In
Figure 8, similar plots are shown for all six planes along the
X coordinate.
We note that, at an
radius, a steady cavity develops in plane 3 for
and steadily increases its angular span along
X. The data in plane 6 reveal that, at
, a drop in the number of acquired samples takes place within the range 100° <
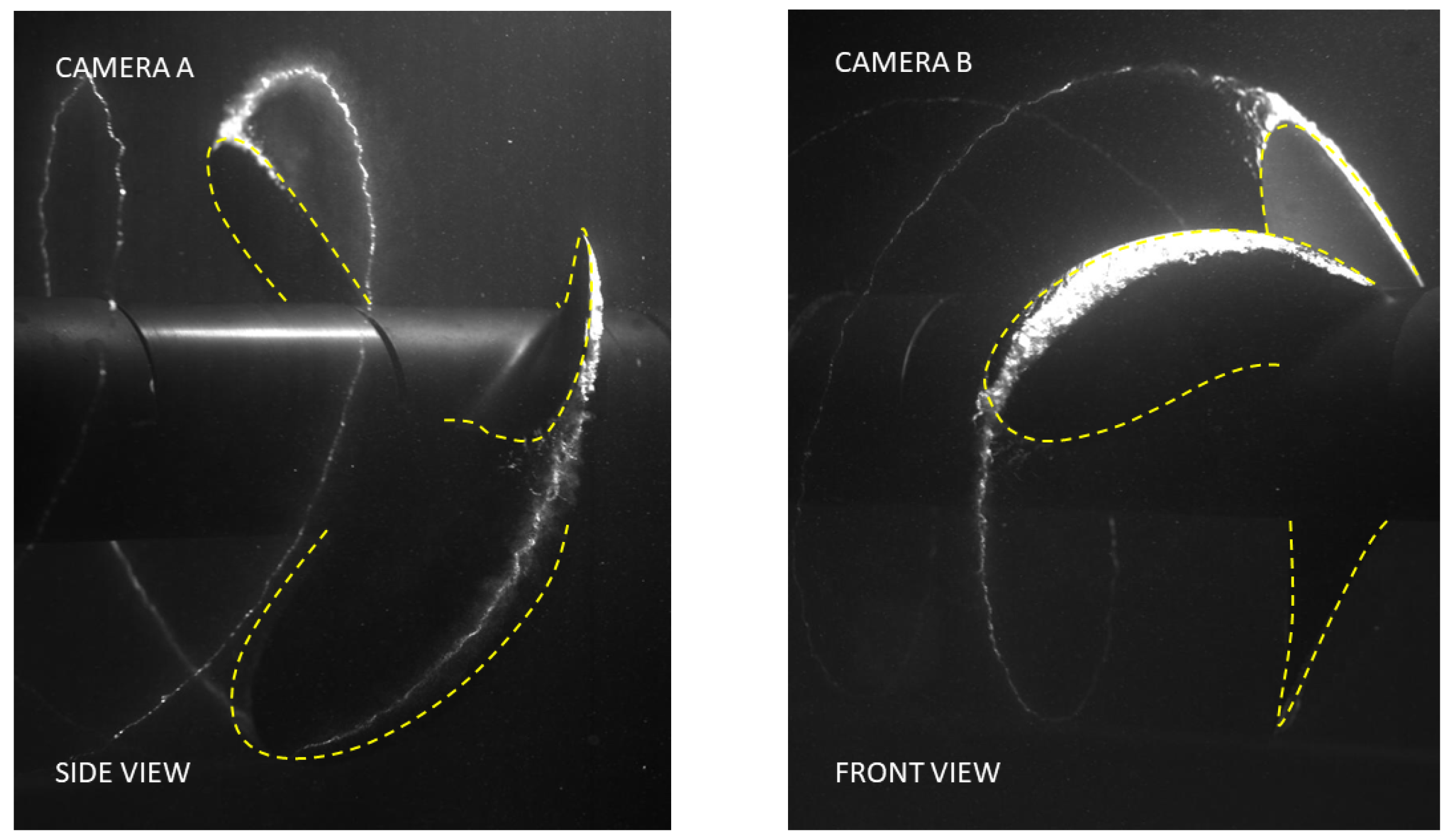
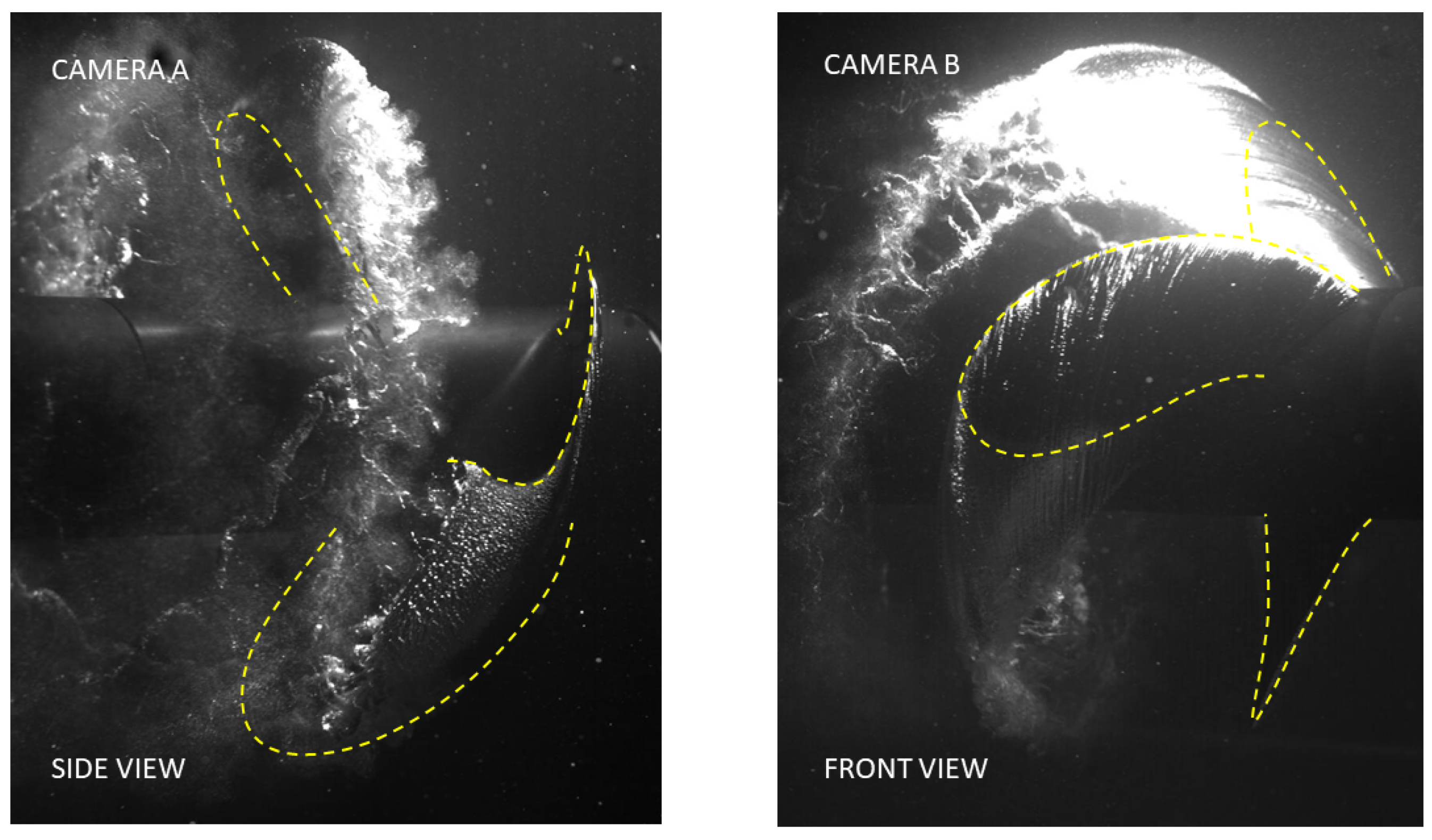
< 130° approximately, down to nearly 40% compared to the undisturbed flow regions. A comparison to the high-speed visualizations in
Figure 4 suggests that this drop is associated with intermittent, cloud-like cavitation stemming from the blade tip. At
, the vapor cavity extends beyond the propeller trailing edge, as plane 6 is located downstream of the propeller (see
Figure 1).
By repeating this procedure for all the radial positions in the acquisition database, it is, therefore, possible to estimate the cavity size at each of the six investigated planes.
Figure 9 shows the cavity thickness, defined as the elevation from the blade surface, estimated at each acquisition plane for
,
, along with a three-dimensional representation of the reconstructed cavity surface. The measurement uncertainty is related to the slot size resolution, as explained in
Section 2, and is shown as error bars.
We point out that this is a steady-state reconstruction, and acquisitions on the six planes were not carried out simultaneously. Additionally, the cavity region was estimated based on a zero-sample criterion, i.e., a grid point was deemed to belong to the cavity if no data were recorded during the acquisition time window. This means that a location in the flow where cavitation is fluctuating or intermittent over time is not assessed by the present approach. Only the regions where the cavity is steadily present can be characterized. However, this reconstruction is fully consistent with the mean flow phase-locked with the propeller, which is addressed in the following.
3.3. Flow Fields at Constant J, Variable
In this section, we present the average velocity field of the axial, radial, and tangential components, respectively
,
, and
at planes 3 to 6 (see
Table 1) and advance coefficient
. We compared the cavitation-free flow to the super-cavity flow to gain insight into the flow alteration induced by the onset of the specific cavitation pattern. The velocity components were made non-dimensional by the free-stream speed
. For the sake of conciseness, we focused our analysis on planes 3 to 6 since, upon preliminary analysis, planes 1 and 2 did not show a noticeable modification of the flow features. In
Figure 10 and
Figure 11, the trend of the axial velocity
is shown along a circular path at radii
and
, respectively, from plane 3 (top) to 6 (bottom) for the three tested cavitation numbers. Uncertainty, as described in the previous section, is also reported.
At , a non-negligible difference between the cavitation-free and cases was observed for plane 5, whereas in planes 3 and 4, the two curves were very similar. In plane 5, the peak axial velocity is slightly reduced for , and the velocity increase within the interval 225° < < 240° features a lower slope. This behavior is more evident in plane 6 for , where the velocity profile appears flatter than for the cavitation-free condition in the same range. As this region corresponds to the flow region on the suction side of the propeller’s blade, it was observed that even the onset of mild cavitation determined a weakening of the velocity gradients induced by the blade passage.
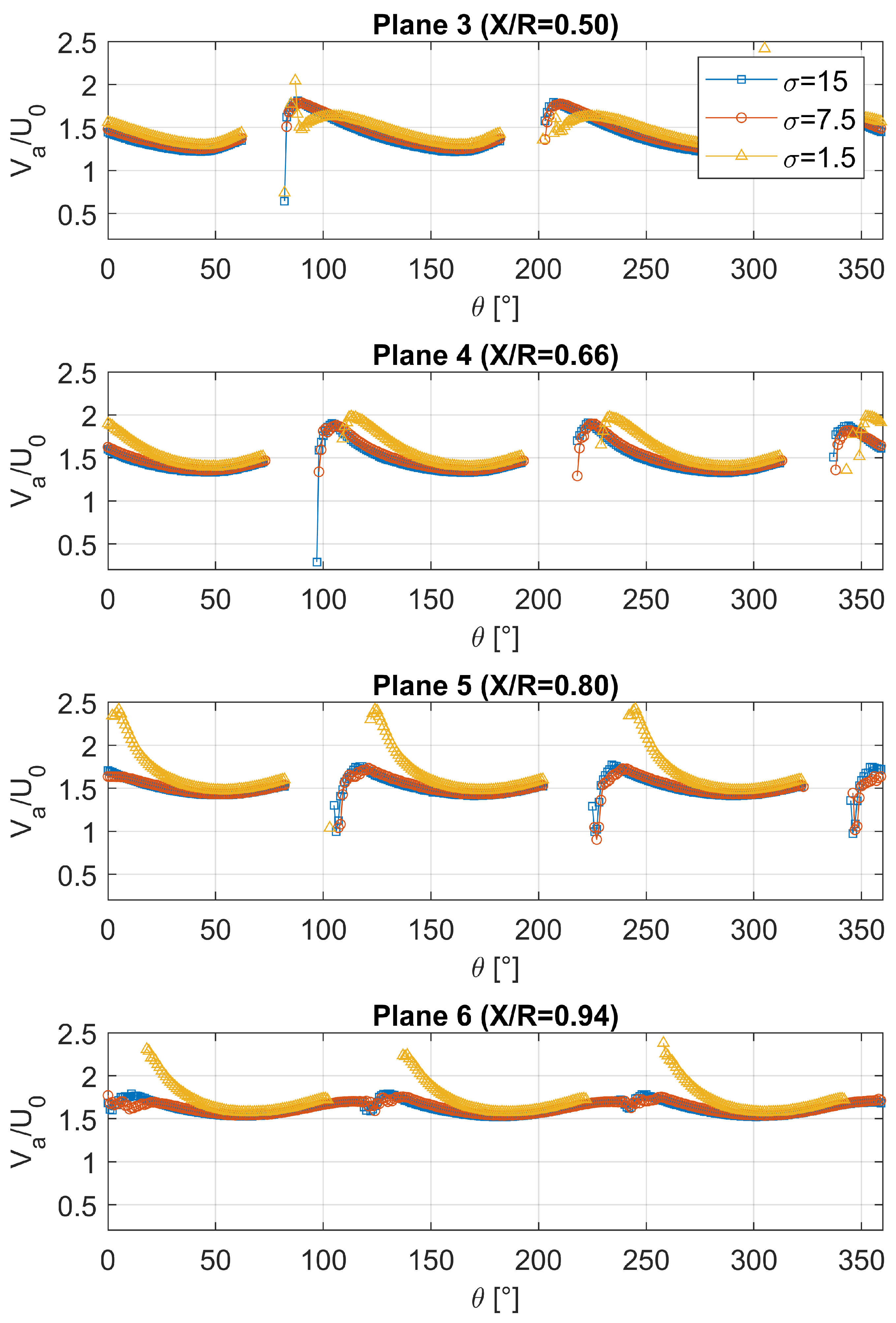
On the other hand, the development of the cavity for
markedly affects the axial velocity profiles. Despite the limited size of the cavity in plane 3, which is below 2 mm in thickness according to the data shown in
Figure 9, the velocity gradient in the range 200° <
< 225° appears strongly reduced. In fact, compared to the cavitation-free and
cases, where the peak axial velocity is reached at approximately
= 200°, the peak is attained at
= 225° in the presence of the cavity and is also reduced to
compared to the
value of the other cases.
Interestingly, the velocity profile undergoes a marked alteration in plane 4, where the cavity size is nearly three-times that found in plane 3, with a peak velocity exceeding the other cases by and a comparable gradient in the rising phase. This trend reaches its peak in plane 5. The cavity presence induces a steep rise (occurring within 4°) of the axial velocity on the suction face of the blades, which peaks at . This is, in turn, associated with a fast descent, at the end of which levels at the same values as the other conditions. Due to the super-cavity formation, the effect persists also in plane 6, although slightly weakened, with a peak velocity not exceeding .
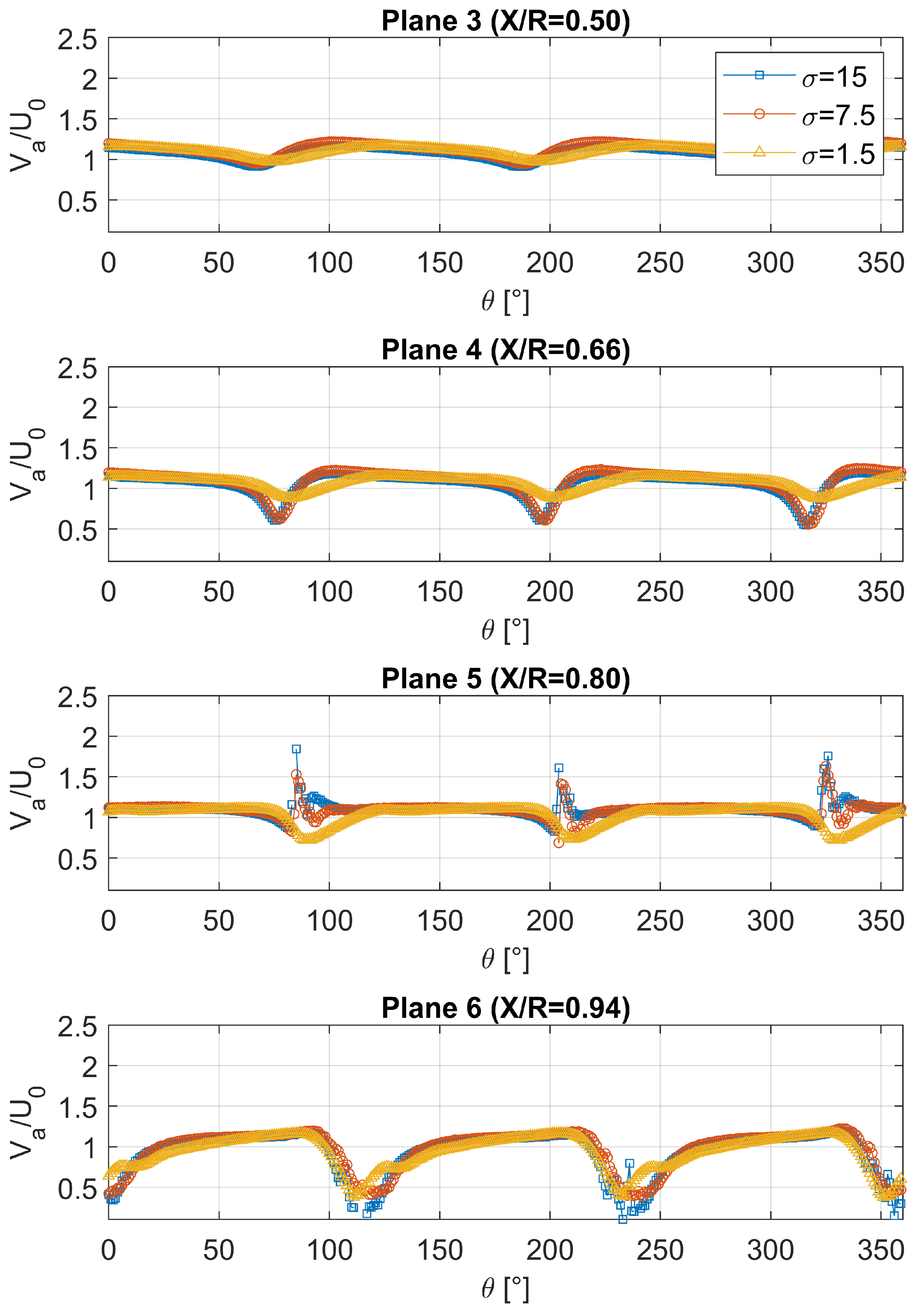
The analysis at the radial position
, reported in
Figure 11, shows the impact of the cavity development on more-peripheral flow regions. Furthermore, it allows the investigation of the interactions between the cavity and the tip-vortex structure that forms in this region. Consistent with the situation at
, the cavitation-free and
cases are very similar for plane 3, whereas a flatter profile is reported for
. This behavior is conserved at more downstream positions: the curves’ trend reveals a smoother behavior of
under full cavitation in the angle interval matching the blade passage (approximately 205° <
< 220° in plane 4), compared to the cavitation-free conditions, where the spatial velocity fluctuations due to the tip-vortex are evident. The impact of the cavity on the tip-vortex region is evident in planes 5 and 6. While the cavitation-free case features a strong peak at
= 205°, the
case shows a lower peak followed by a short region characterized by
. We note that, for full-cavitation conditions, the axial velocity never exceeds the free-stream speed. In plane 6, the inspection of the cavitation-free case reveals a small tip-vortex region for 238° <
< 240°, which vanishes at
. For
, the velocity profile features a local maximum at approximately
= 245°. The role of the cavity in the modification of the flow in the blade tip region is, thus, evident and was further investigated via analysis of the velocity fields. An overview of the
fields, provided in
Figure 12, reveals that slight leading edge and tip-vortex cavitation have a moderate impact on the axial flow field structure, whereas the presence of the full cavity at
modifies the flow field dramatically.
Starting from plane 3, the axial flow field undergoes substantial changes at
, although the cavity size does not exceed, on average, 25% of its maximum size. The inner region (
) features a slight increase in axial flow velocity in the accelerated flow area, which appears limited to this region. As a consequence, the outer region, around
, features smoother gradients compared to the other cases. As the cavity size increases (see plane 4), the axial flow acceleration discussed in
Figure 10 for
is explained by the observation of a more-pronounced displacement of the accelerated flow region towards the inner radii. In particular and compared to the cavitation-free case, the accelerated flow area, which is defined as the region for which
holds, shrinks from
to
. On the other hand, the peak velocity reaches the value of
.
In plane 5 and clearly outlined by the blank area, the cavity volume increases, and the flow region close to the cavity boundaries undergoes an increase up to . The smoothness of the velocity peaks previously reported at is here better explained with the data in plane 5. The strong local gradients observed at are compared to a gradual decrease for and substantial modifications at . Under fully developed cavitation, the velocity peaks in this region vanish and are replaced by a deceleration zone that extends to approximately , where the flow acceleration begins due to the cavity occurrence. It appears that the impact of the cavity on the flow field is not limited to the locations where the cavity develops, but extends to other flow areas. The cavity extending beyond the propeller trailing edge, as observed through the visualizations, is here confirmed by the results in plane 6 where a no-data region is clearly visible. The axial inter-blade flow features an increase up to in the region close to the hub, compared to at the same location in the flow for non-cavitating conditions. Insight into the interactions between the cavity and the tip-vortex is given by the analysis of the velocity maps in plane 6. The presence of a steady tip-vortex cavity is noticeable for the cavitation-free case and can be identified by the small blank areas spanning a 4° range. Starting at , this small cavitation region is no longer detectable, whereas the tip-vortex trace appears stretched and elongated in the tangential direction. For , the trace of the tip-vortex is not detectable and is replaced by an isolated accelerated region. This complex behavior is possibly associated with the non-trivial shape of the cavity in the region . It appears that the formation of a steady cavity reaching further than the propeller blade size works as an accelerator by narrowing the inter-blade section.
The normalized fields of the tangential component of velocity
are shown in
Figure 13 for planes 3 to 6. Compared to the non-cavitating conditions, the tip region at
is affected by a decrease of the tangential component at every downstream position. In particular, in planes 3 and 4, the positive and negative
regions at the tip appear to be weaker than the
case. In plane 5, the region
has nearly vanished, while a
area on the suction side of the blade can be identified. In plane 6, the velocity field at
is characterized by a tip region with
. This is in stark contrast to the free-cavitation conditions. As discussed before, a small blank area of steady cavitation is associated with the tip-vortex, and this area is surrounded by two
regions of opposite sign. This scenario is confirmed by the development of tip-vortex cavitation, as visualized in
Figure 4. At the most-downstream plane, the trace of the rolling shear layers stemming from the propeller’s blade trailing edge is also visible. For fully cavitating conditions, several changes in the flow field can be noticed. Starting at plane 3, the
contour map appears markedly changed. The overall value of
does not drop below
compared to the
minimum value found in the tip region at
. The swirling motion induced by the tip structures is dampened by the cavity at its early stage of development. The inner radii feature an overall increase of the tangential component, in particular towards the pressure side of the blades. In plane 4, the trace of the tip-vortex (highlighted by a red circle) is not visible, while the
map in the inter-blade region appears more homogeneous. This finding reveals a scenario similar to that of the axial component discussed before. As the cavity grows in size, with a thickness more homogeneously distributed along the tangential direction, the flow field components tend to have a more-homogeneous trend. In this respect, the trace of the shear layer roll-up visible for the other cases is merged into the acceleration zone in the
case. At the most-downstream location and for the fully developed cavitation case, the trace of the trailing edge shear layers gives way to the cavity while the rest of the velocity field shows no particular pattern. The tangential velocity increase appears limited to the areas close to the cavity surface and the propeller’s hub. On the other hand, the areas towards the blades’ pressure side display a distribution similar to the
condition. In the tip region, the cavity presence causes the
value not to exceed
compared to
of the
case in the same region. The cavity’s presence has a dampening effect on the local
gradients associated with the tip-vortex at the outer radii. This effect is compensated by an increase of the tangential component in the inner regions.
Further insight into the role played by the cavity in accelerating the inter-blade flow is given by the plots of
Figure 14, where the
increment between cavitating (
) and non-cavitating flow (
) is shown in three planes. The increment is normalized versus the free-stream speed.
These results confirm that, as the cavity develops (see the plots for plane 4, middle picture) and up to approximately half of the propeller radius, the region close to the hub is characterized by an axial flow acceleration, ranging from nearly
to
, in the area adjacent to the cavity. In plane 5 and at
, the flow right above the cavity experiences the maximum
increment, reaching
. The axial flow increment persists also downstream of the propeller in plane 6, with a maximum increment of
. These findings show that, at the location of maximum cavity thickness, the axial flow acceleration is still present, albeit weakened, in the near-wake. The region near the blade tips exhibits a different trend, with local regions of both an increase and decrease of the axial velocity. This is explained with the help of high-speed visualizations; see
Figure 4,
Figure 5 and
Figure 6. The development of an extended cavity is concurrent with the disappearance of the tip-vortex structure.
In a similar manner, we report the increment of
in
Figure 15. The reduced development of the tip-vortex occurring at this
is confirmed by the tangential acceleration/deceleration pattern in the tip region for planes 3 to 5. In plane 6, a different pattern of a tangential velocity increment is observed. The outer region surrounding the cavity along the radial direction undergoes a strong decrease, with a
peak level compared to
for
. This observation shows that, in the near-wake, the cavity impact on the flow tangential component is stronger. Interestingly, the tangential velocity is reported to increase in the inner inter-blade region, particularly in plane 4, indicating that the flow swirl generated by the propeller is stronger at the inner radii. Nevertheless, for radii
, the effect of the cavity on the tangential velocity increase is different from that on the axial component. The peak increment of
is about
and
at
for planes 5 and 6, respectively. While the axial increment peak was attained in plane 5 and was followed by a decrease in plane 6, this trend is reversed for the
component for which the increment keeps growing, showing that the cavity interacts with the flow in a complex way.
These findings were usefully compared to the propeller performance data, which were obtained experimentally. With
T,
Q,
n, and
being the thrust, torque, rotation rate, and water density at 21 °C, respectively, the corresponding thrust coefficient
, torque coefficient
, and efficiency
are calculated and collected in
Table 4 for
. The results show that light leading-edge cavitation does not affect the propeller performance, whereas the extended cavity at
is responsible for a loss of five percentage points of efficiency, corresponding to a relative loss of efficiency of approximately 11%. It appears that the presence of the extended cavity works as a local axial and tangential flow accelerator, as evinced from the velocity field data, by increasing the momentum ejection through the propeller. This increased momentum partly compensates the expected drop in performance.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}