
Analysis of Holding Force Acting on Anchored Vessels


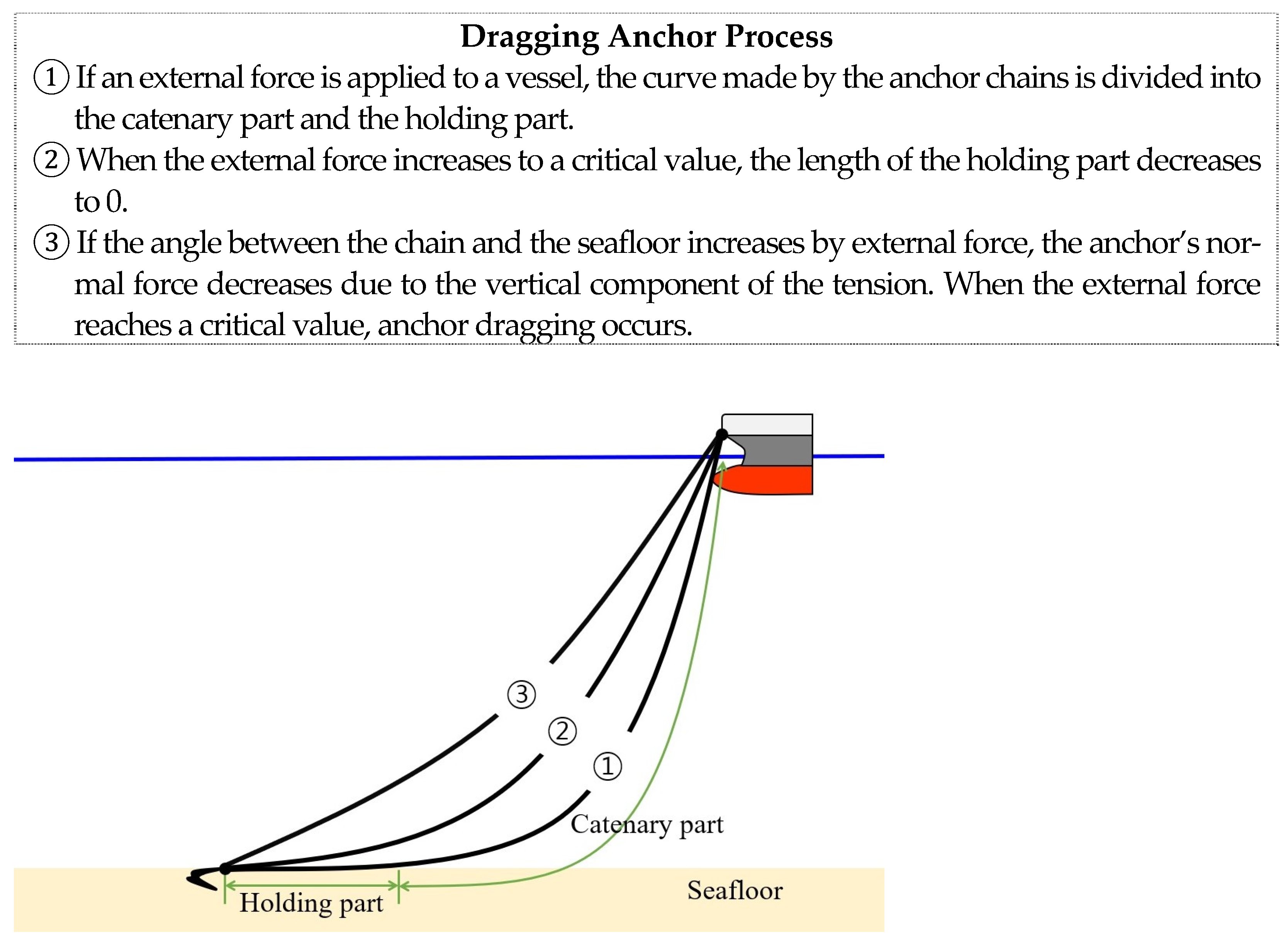
Abstract
:1. Introduction
2. Materials
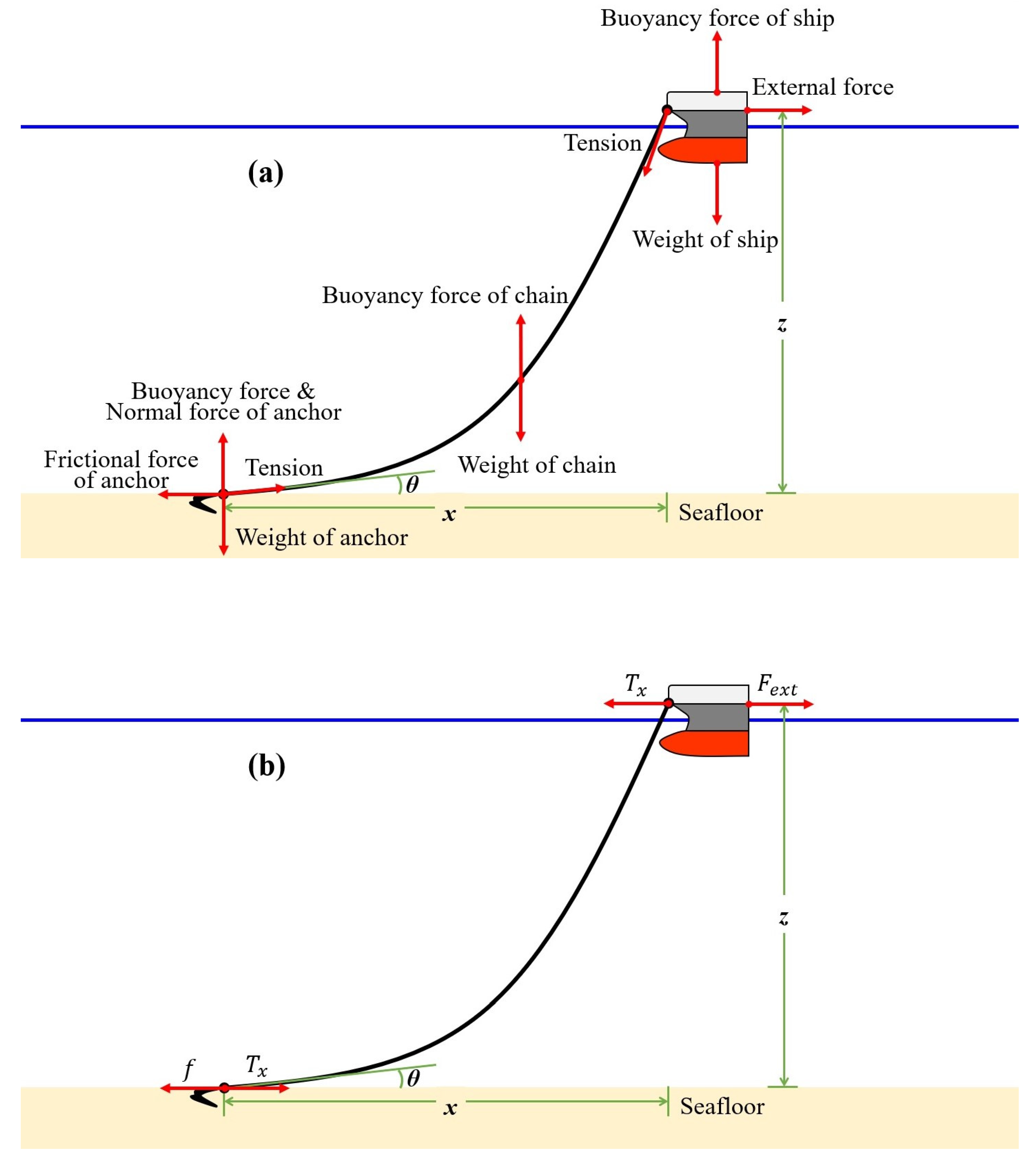
3. Analysis of Holding Force
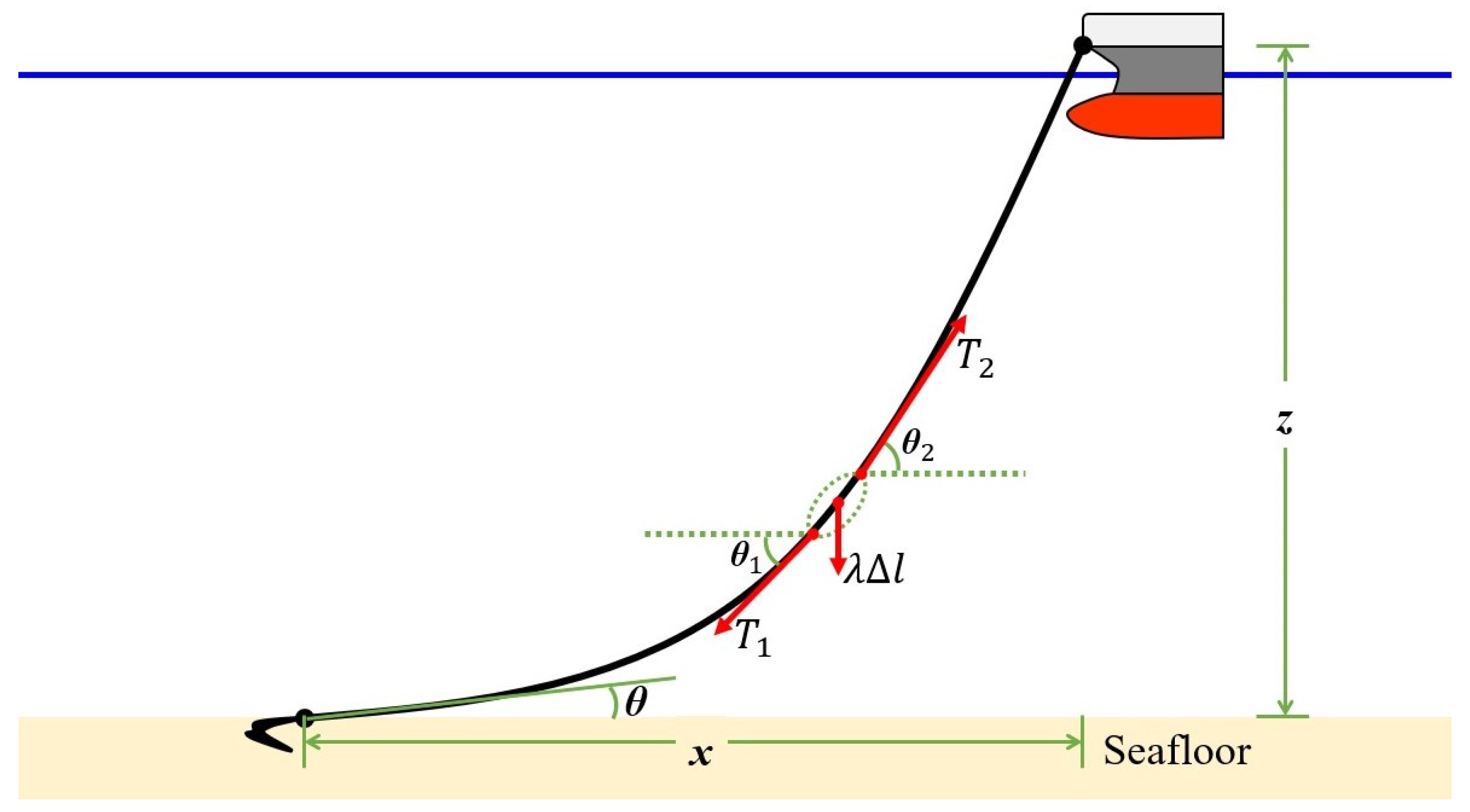
3.1. Tension of Catenary Curved Chain
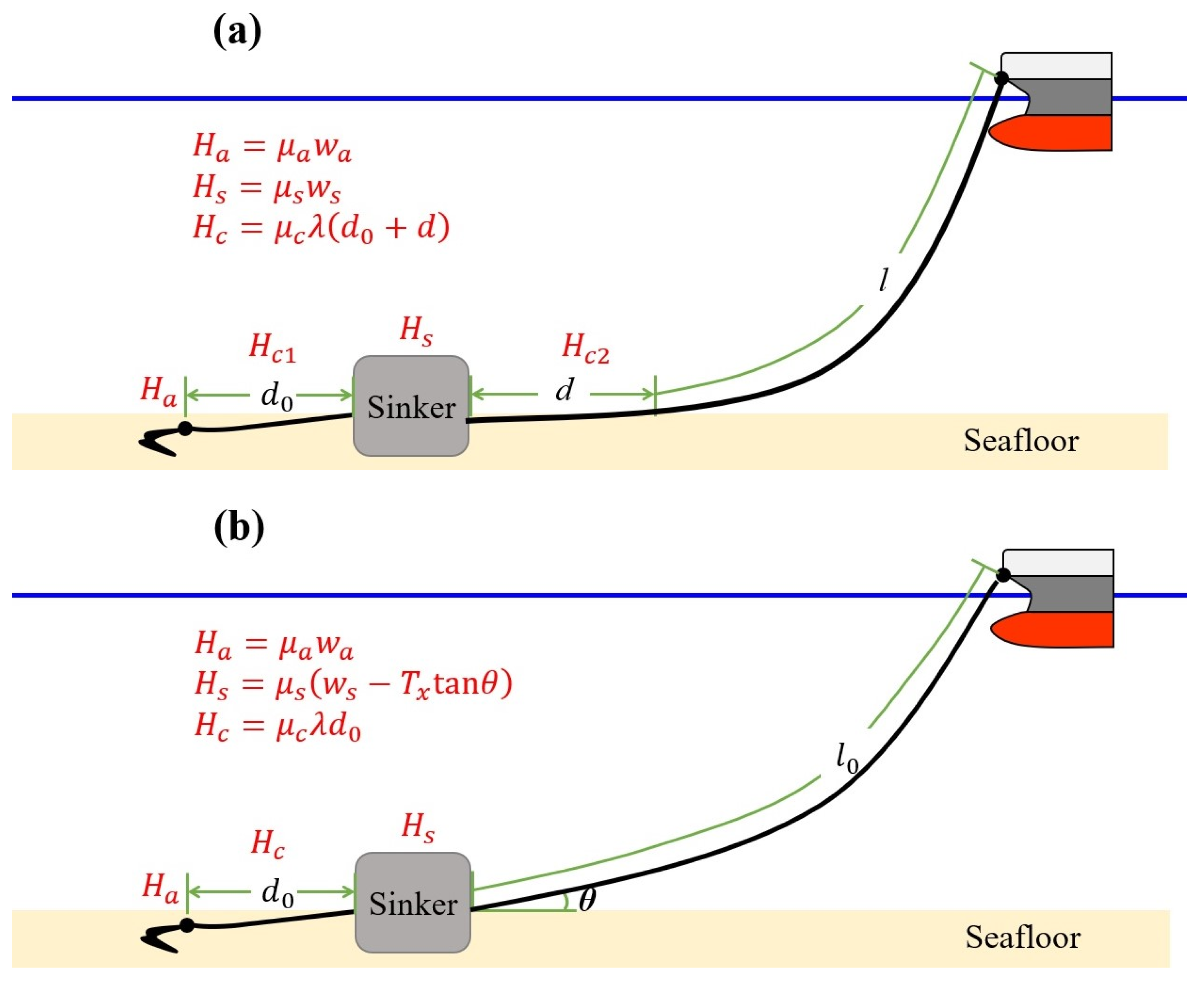
3.2. Holding Force before Anchor Dragging:
- Cases where there is a holding part:
- Cases when there is no holding part:
3.3. Holding Force at Anchor Dragging:
- Where there is a holding part:
- Where there is no holding part:
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Forces at a Catenary Curve
- Vertical coordinate of the anchored vessel:
- Length of the catenary part:
- Horizontal tension of the catenary
Appendix B. Before Anchor Dragging
- Where there is a holding part:
- Where there is no holding part:
Appendix C. At the Moment of Anchor Dragging
- Where there is a holding part:
- Where there is no holding part:
References
- Lim, B.-T.; Ko, J.-W.; Kim, B.-S. A study on theoretical consideration to the holding power and holding power coefficient of war vessel anchor. J. Navig. Port Res. 2015, 39, 1–6. [Google Scholar] [CrossRef]
- Kim, M.-S.; Ahn, J.-Y.; Lee, C.-H. Evaluation of Holding Power by Tension Meter for Anchoring. J. Fish. Mar. Sci. Educ. 2019, 99, 682–692. [Google Scholar]
- Sato, H. A study on the holding capacity of anchor. J. Sch. Mar. Sci. Technol. Tokai Univ. 2005, 3, 31–39. [Google Scholar]
- Shoji, K. Study on the motion of a moored body and the tension of mooring lines. Soc. Nav. Archit. Jpn. 1975, 138, 233–246. [Google Scholar] [CrossRef] [PubMed]
- Moharrami, M.J.; Shiri, H. Reliability assessment of drag embedment anchors in clay for catenary mooring systems. Mar. Struct. 2018, 58, 342–360. [Google Scholar] [CrossRef]
- O’Neill, M.P.; Bransby, M.F.; Randolph, M.F. Drag anchor fluke soil interaction in clays. Can. Geotech. J. 2003, 40, 78–94. [Google Scholar] [CrossRef]
- Okazaki, T.; Hirai, Y. Development of a support system to predict dragging anchor phenomenon for mariner. In Proceedings of the 2011 6th International Conference on System of Systems Engineering, Albuquerque, NM, USA, 27–30 June 2011; IEEE: New York, NY, USA, 2011; pp. 185–190. [Google Scholar]
- Liu, H.; Liu, C.; Yang, H.; Li, Y.; Zhang, W.; Xiao, Z. A novel kinematic model for drag anchors in seafloor soils. Ocean Eng. 2012, 49, 33–42. [Google Scholar] [CrossRef]
- Ren, X.Y.; Lei, Z.M.; Sun, L.; Yan, S. Model tests of dragging hall anchors in sand. J. Mar. Sci. Technol. 2016, 24, 26–31. [Google Scholar]
- Yoon, S.; Joung, T. Risk on design & installation of drag embedment anchor (DEA) for floating offshore wind turbine (FOWT). J. Int. Marit. Saf. Environ. Aff. Shipp. 2022, 6, 199–205. [Google Scholar]
- Ueno, M. Analysis of Holding Force Limit and Provision against Dragging Anchor. J. Waterw. Port Coast. Ocean. Eng. 2022, 148, 04021042. [Google Scholar] [CrossRef]
- Wang, W.; Wang, X.; Yu, G. Vertical holding capacity of torpedo anchors in underwater cohesive soils. Ocean. Eng. 2018, 161, 291–307. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Y.; Li, C.; Wang, C.; Zhang, G.; Sun, S. Study on the Style Design and Anchoring Mechanism of Enlarged Head Anchors. Sustainability 2023, 15, 8645. [Google Scholar] [CrossRef]
- Golait, Y.S.; Padade, A.H.; Cherian, T. Prediction of Quantitative Response of Under-Reamed Anchor Piles in Soft Clay Using Laboratory Model Study. J. Test. Eval. 2018, 46, 507–522. [Google Scholar] [CrossRef]
- Thorne, C.P. Penetration and Load Capacity of Marine Drag Anchors in Soft Clay. J. Geotech. Geoenvironmental Eng. 1998, 124, 945–953. [Google Scholar] [CrossRef]
- Navy. Design Criteria of Anchor and Anchor Chain; Naval vesselbuilding(SU)-GI-06-007(2004); Navy: Oklahoma City, OK, USA, 2004. [Google Scholar]
- Mierlo, R.V. Anchor Trajectory Modeling; Faculty of Mechanical Engineering, Offshore Engineering Major, Delft University of Technology: Delft, Switzerland, 2005. [Google Scholar]
- Murff, J.D.; Randolph, M.F.; Elkhatib, S.; Kolk, H.J.; Ruinen, R.M.; Strom, P.J.; Thorne, C.P. Vertically Loaded Plate Anchors for Deepwater Applications. In Frontiers in Offshore Geotechnics ISFOG; Taylor & Francis: Abingdon, UK, 2005. [Google Scholar]
- Ruinen, R.M. Influence of Anchor Geometry and Soil Properties on Numerical Modeling of Drag Anchor Behavior in Soft Clay. In Frontiers in Offshore Geotechnics ISFOG; Taylor & Francis: Abingdon, UK, 2005. [Google Scholar]
- Miedema, S.A.; Lagers, G.H.G.; Kerkvliet, J. An Overview of Drag Embedded Anchor Holding Capacity for Dredging and Offshore Applications; WODCON: Orlando, FL, USA, 2007. [Google Scholar]
- Jung, C.-H.; Kong, G.-Y. A Study on the Development of Anchoring Manual for T.S. HANBADA. J. Kor. Soc. Mar. Environ. Saf. 2009, 15, 49–55. [Google Scholar]
- Lee, Y.-S.; Jung, Y.-C.; Kim, S.-W.; Yun, J.-H.; Bae, S.-H.; Guyen, P. A Study on the Limit of Anchor Dragging for Vessel at Anchor (I). J. Navig. Port Res. 2005, 29, 357–363. [Google Scholar] [CrossRef]
- Jung, C.-H.; Kong, G.-Y.; Bae, B.-D.; Lee, Y.-S. Analysis on the Pattern of Dragging Anchor in Actual Vessel. J. Navig. Port Res. 2009, 33, 505–511. [Google Scholar] [CrossRef]
- Jung, C.-H.; Lee, Y.-S.; Kim, J.-S.; Kong, G.-Y. A Study on the Holding Power Coefficient of AC-14 type and ASS type Anchor in Actual Vessels. J. Navig. Port Res. 2011, 35, 613–618. [Google Scholar] [CrossRef]
- Jung, C.-H.; Kong, G.-Y. A Study for the Evaluation of the Force by the Wind on the Vessel at Anchoring. Korean Soc. Mar. Environ. Saf. 2009, 15, 223–228. [Google Scholar]
- Yoon. The Theory and Executive Ability of Ship Control; Se-Jong Publisher: Seongnam, Republic of Korea, 2014; pp. 1–15. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forces | Constituting Forces | Variables |
|---|---|---|
| : wind-driven force | : wind speed | |
| : current-induced hydraulic force | : current speed | |
| : drift force by wave | : wave height | |
| : horizontal component of tension | (: position of vessel (origin: anchor) : length of catenary : angle | |
| : frictional force by anchor | ||
| : frictional force by anchor chains | ||
| : frictional force by sinker |
| Holding Coefficient of Anchor (Sinker) | |||||||
|---|---|---|---|---|---|---|---|
| 2 | 4 | 6 | 8 | 10 | 12 | ||
| Tangential angle between anchor chain and seafloor (degree) | 5 | 0.851 | 0.740 | 0.655 | 0.588 | 0.533 | 0.487 |
| 10 | 0.739 | 0.586 | 0.485 | 0.414 | 0.361 | 0.320 | |
| 15 | 0.651 | 0.482 | 0.383 | 0.318 | 0.271 | 0.237 | |
| 20 | 0.578 | 0.407 | 0.314 | 0.255 | 0.215 | 0.186 | |
| 25 | 0.517 | 0.349 | 0.263 | 0.211 | 0.176 | 0.151 | |
| 30 | 0.464 | 0.302 | 0.224 | 0.177 | 0.147 | 0.126 | |
| 35 | 0.416 | 0.263 | 0.192 | 0.151 | 0.124 | 0.106 | |
| 40 | 0.373 | 0.229 | 0.165 | 0.129 | 0.106 | 0.090 | |
| 45 | 0.333 | 0.200 | 0.142 | 0.111 | 0.090 | 0.076 | |
| 50 | 0.295 | 0.173 | 0.122 | 0.094 | 0.077 | 0.065 | |
| 55 | 0.259 | 0.148 | 0.104 | 0.080 | 0.065 | 0.055 | |
| 60 | 0.224 | 0.126 | 0.087 | 0.067 | 0.054 | 0.045 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Min, S.; Oh, K. Analysis of Holding Force Acting on Anchored Vessels. J. Mar. Sci. Eng. 2024, 12, 95. https://doi.org/10.3390/jmse12010095
Min S, Oh K. Analysis of Holding Force Acting on Anchored Vessels. Journal of Marine Science and Engineering. 2024; 12(1):95. https://doi.org/10.3390/jmse12010095
Chicago/Turabian StyleMin, Seungsik, and Kyungwon Oh. 2024. "Analysis of Holding Force Acting on Anchored Vessels" Journal of Marine Science and Engineering 12, no. 1: 95. https://doi.org/10.3390/jmse12010095