
Development of a 6 Degree of Freedom Unmanned Underwater Vehicle: Design, Construction and Real-Time Experiments
 , ,
, ,  and
and
Abstract
:1. Introduction
1.1. Related Work
1.2. Main Contribution
- (i)
- A novel and functional prototype vehicle, fully actuated by eight thrusters, it has frontal-rear, lateral, submersion-emersion displacements, as well as roll, pitch and yaw movements. The vehicle is a mechatronic platform that enables to prove the effectiveness of different strategies in the navigation and automatic control field, from undergraduate to graduate students, as well as practitioners and researchers. Since the vehicle is controlled from a ground station through Robot Operating System (ROS), the simplicity of implementing algorithms (estimation, control, navigation, fault detection) is another advantage of the vehicle.
- (ii)
- Instead of having a vectored configuration in two-dimensions (axes X-Y), the developed vehicle has 2 sets of vectored thrusters in three-dimensions (axes X-Y-Z), one set in the top part and another set in the bottom part. The underwater vehicle, with the thrusters configuration developed, represents a more challenging system that is useful in the development and implementation of algorithms of optimal thrust allocation, as well as fault identification and fault tolerant control.
- (iii)
- The vehicle has two vision systems. The first one composed by a monocular camera, used to monitor the underwater environment. The second one is composed by a stereo camera and a Nvidia board that enables the implementation of powerful computer vision and image processing methods. The camera’s software version 3.5 development kit (SDK) simplifies the application of vision algorithms (3D reconstruction on-line, pose estimation, object detection and so on) in a few lines of code.
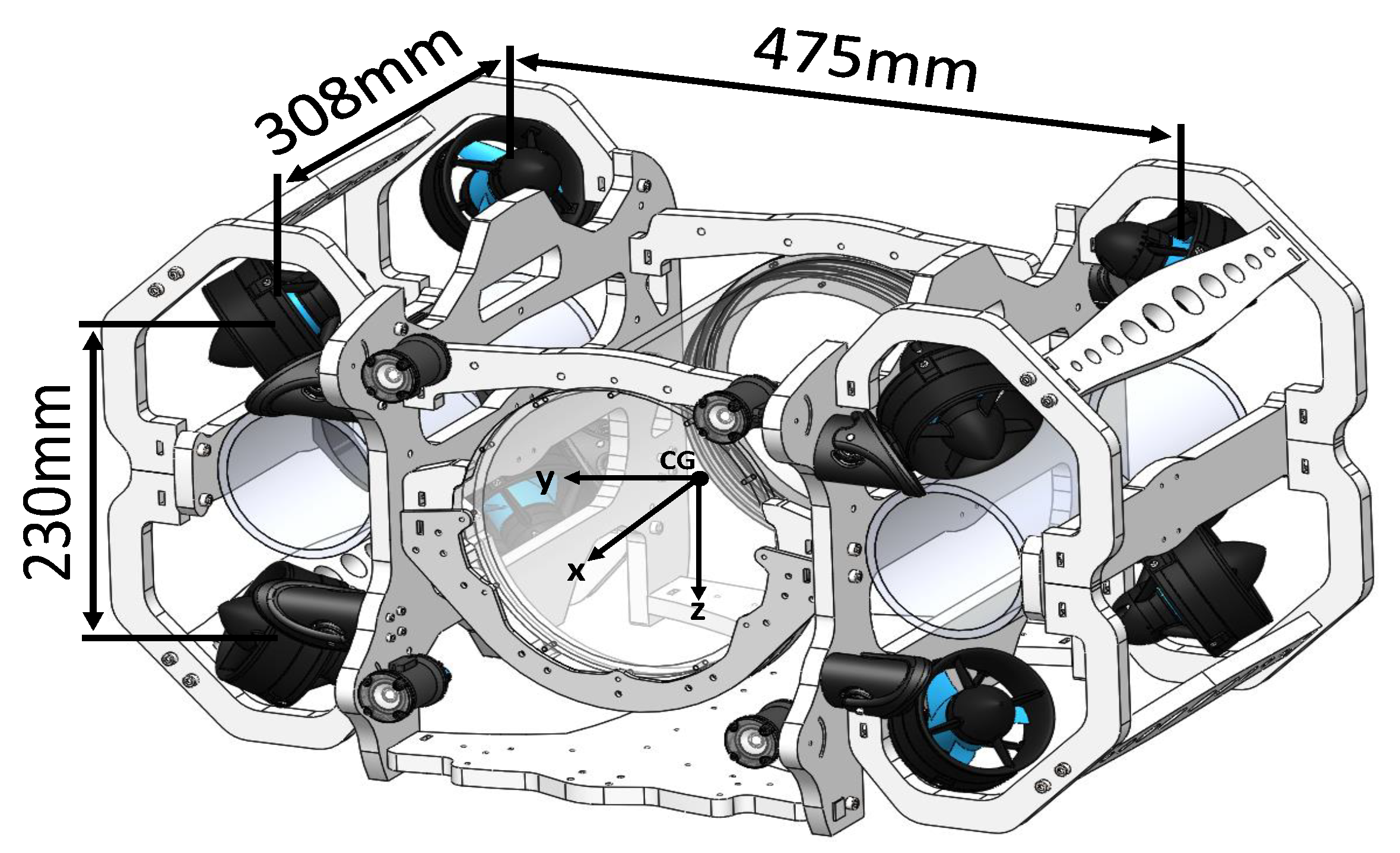
2. Mechatronics Design and Construction
2.1. Mechanical Design
2.1.1. Material Selection
2.1.2. Frame
2.1.3. Hydrostatic and Hydrodynamic Considerations with Computational Fluid Dynamics (CFD) Analysis
- Determine added mass for surge, sway and heave using 3D empirical data.
- Determine added mass for surge, sway and heave using 2D empirical data and strip theory.
- Compute the difference between both methods (obtain a scale factor).
- Determine added mas for roll, pitch and yaw using 2D data and strip theory Scale the results and obtain the added mass parameters.
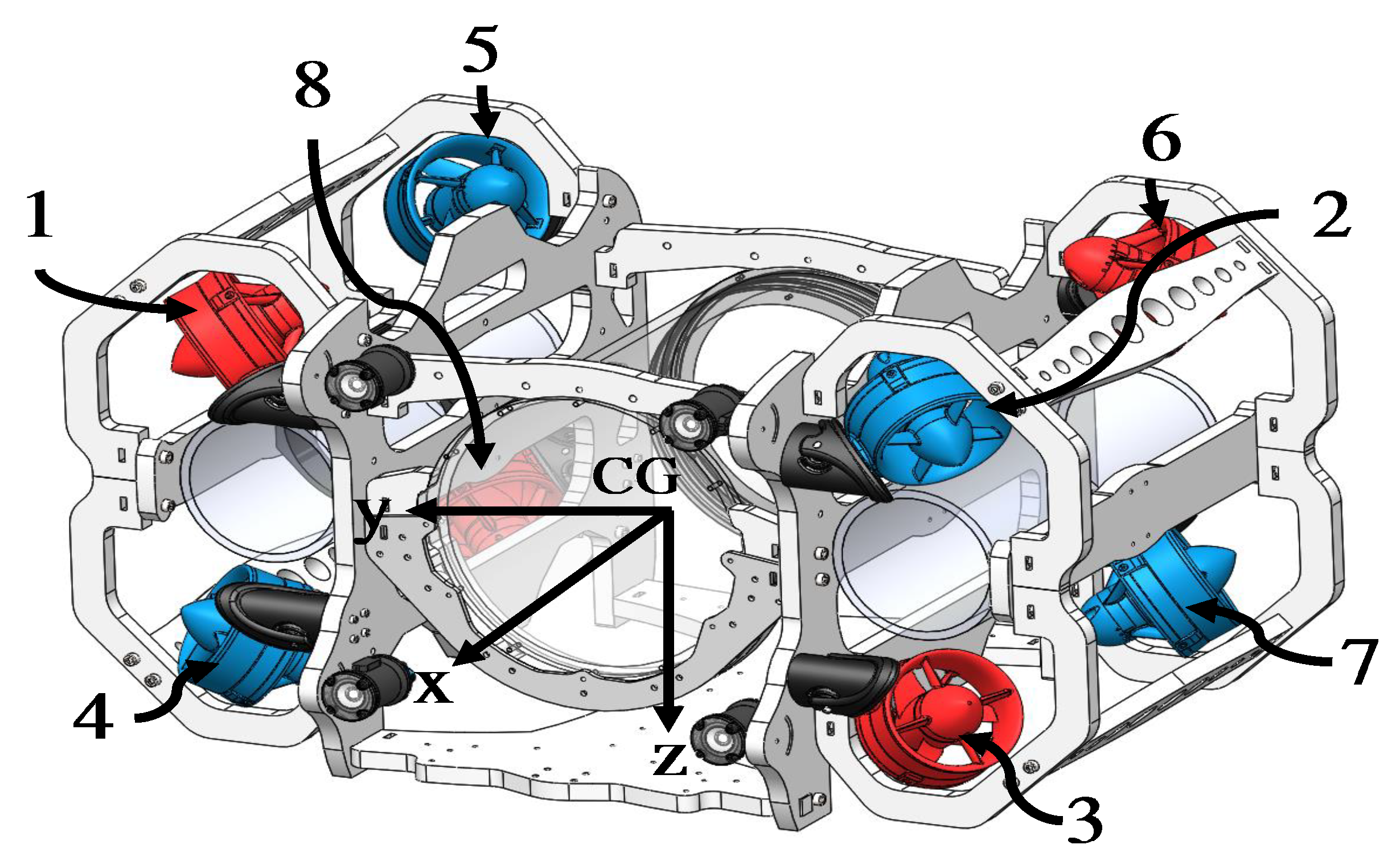
2.1.4. Thrusters Distribution
- -
- Lateral movement. This is produced by applying a positive signal to thrusters (2, 3, 6, 7) and a negative signal to thrusters (1, 4, 5, 8).
- -
- Roll movement around the axis. It is achieved through the moments generated by the thrusters. To generate the rotation movement, a positive signal is sent to the thrusters (2, 6, 4, 8) and a negative signal is sent to (3, 7, 1, 5).
- -
- Vertical movement. This happens when a positive signal is sent to the upper thrusters (3, 4, 7, 8) and a negative signal to those located at the bottom (1, 2, 5, 6).
- -
- Pitch movement around the axis. This movement is obtained with a positive signal to thrusters (3, 4, 5, 6) and a negative signal to (1, 2, 7, 8).
- -
- Longitudinal movement. This is produced by applying a positive signal to frontal thrusters (1, 2, 3, 4) and a negative signal to rear thrusters (5, 6, 7, 8).
- -
- Yaw movement around the axis. This movement is done by applying a positive signal to thrusters (2, 3, 5, 8) and a negative signal to the opposite thrusters (1, 4, 6, 7).
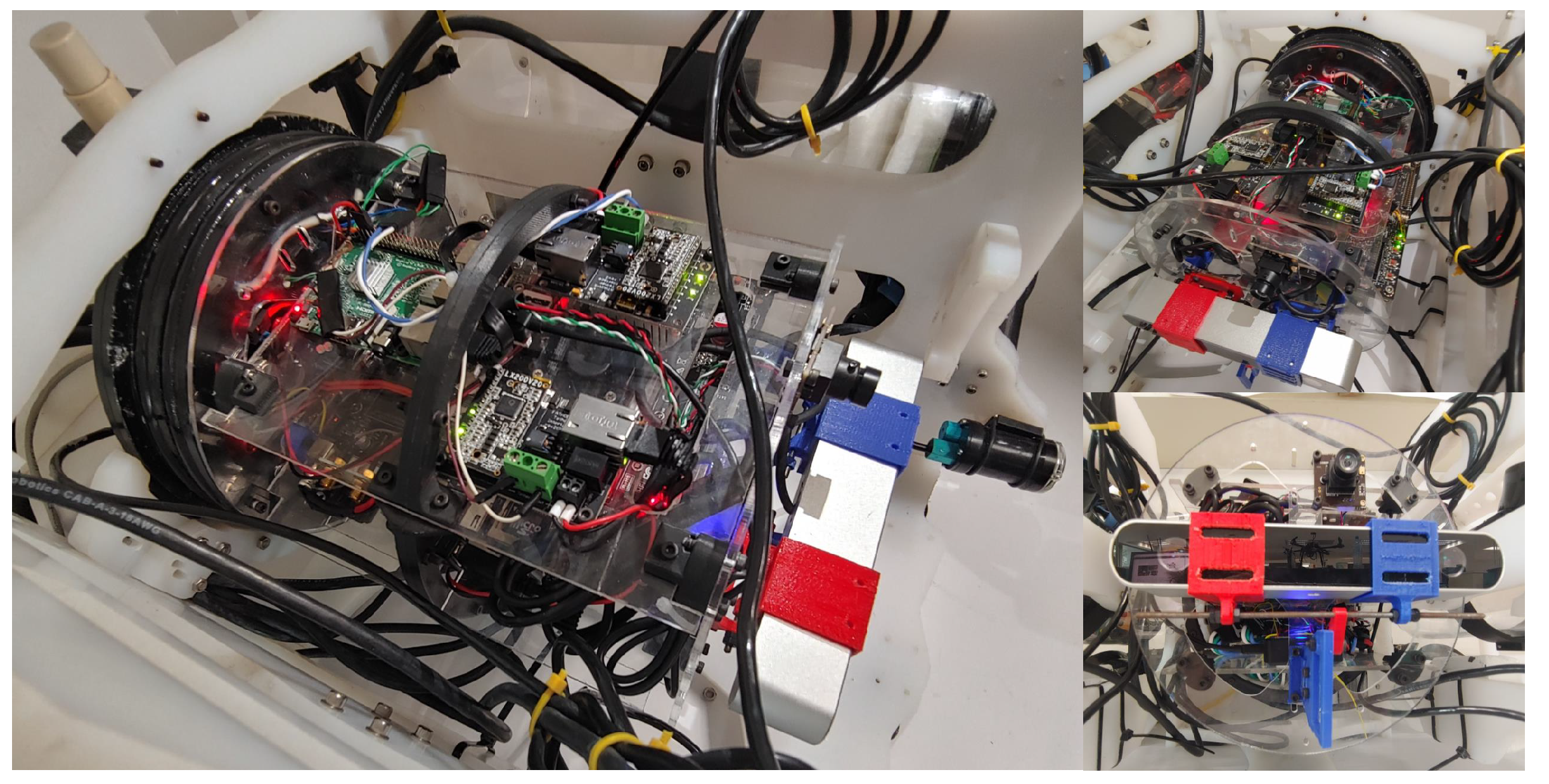
2.2. Electrical and Electronics
2.2.1. Position and Communication
2.2.2. Control Subsystem
2.2.3. Vision Subsystem
2.3. Control Ground Station
3. Mathematical Model and Control Strategies
3.1. Assumptions
- In the 3 DOF model, the movement in surge, sway and yaw directions was neglected.
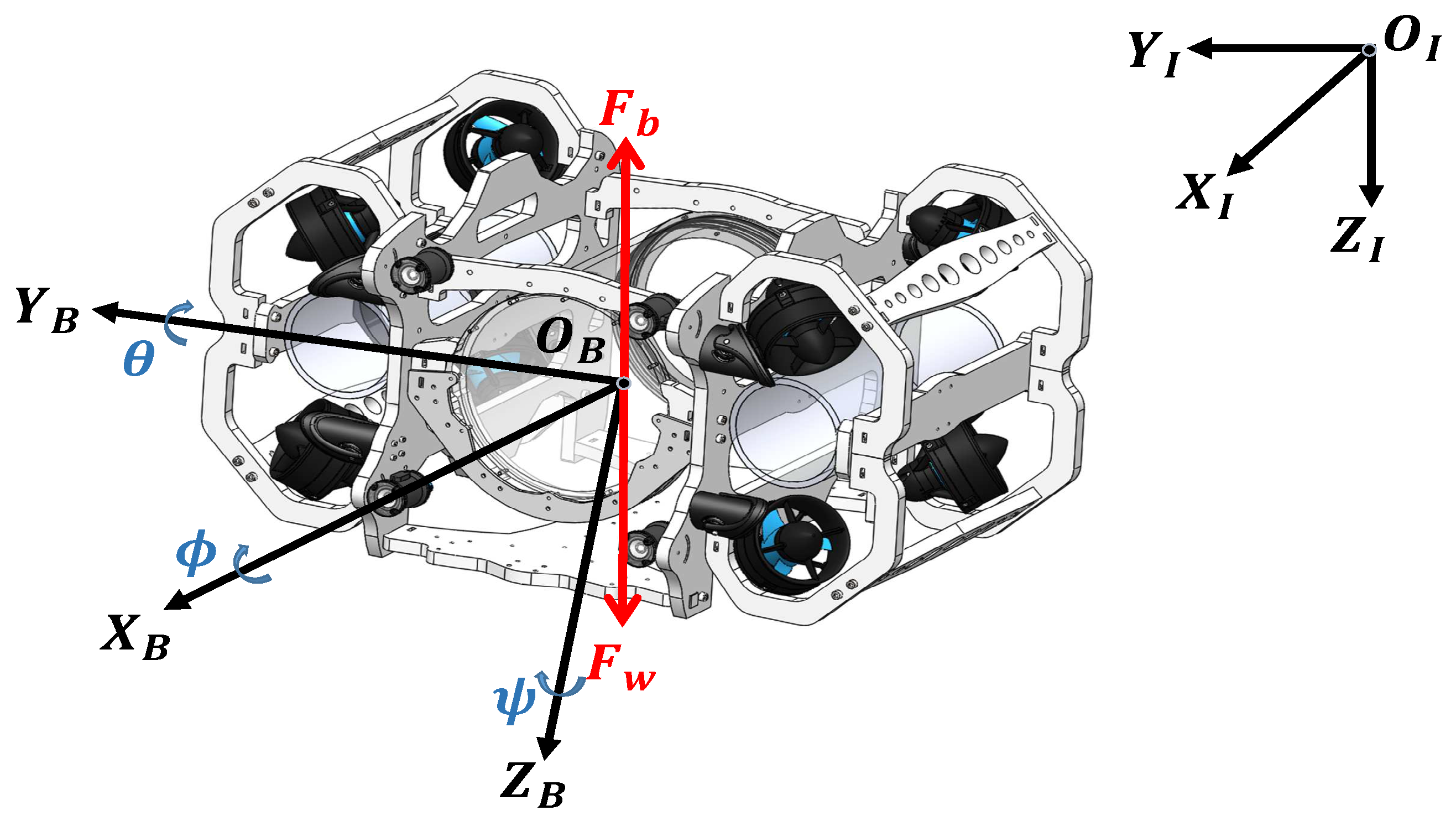
- The vehicle maintains its center of buoyancy above the center of gravity, which provides a positive buoyancy that allows the vehicle to return to the surface in case of power failure.
- The vehicle structure has 3 planes of symmetry.
- In the dynamic model, the disturbances term is added to take into account the effects of tether cable as well as waves.
- The vehicle is considered as a rigid body, without geometric deformations or bending.
- The maximum operation speed of the vehicle is less than 2 m by second.
3.2. 6 DOF Mathematical Model
3.3. 3 DOF Mathematical Model
3.4. Thruster Configuration and Control Allocation
3.5. Robust PD Control Strategy
3.6. Super Twisting Control Strategy
4. Results
4.1. Underwater Vehicle Platform
4.2. Trajectory Tracking Results
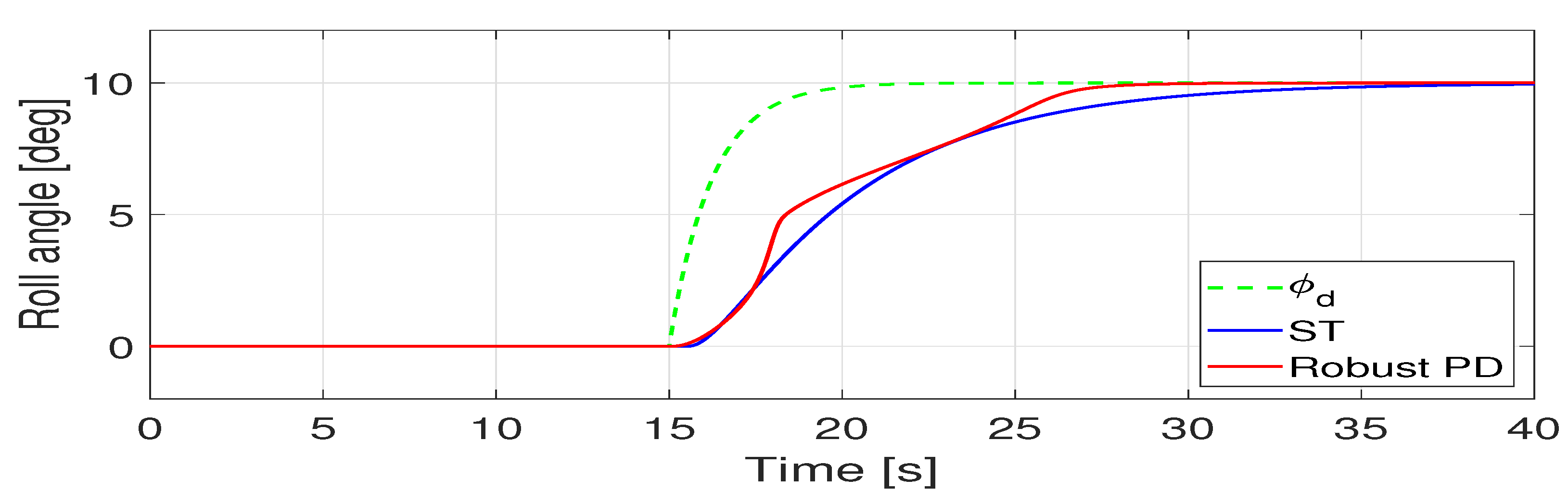
- Experiments A. In these experiments, the vehicle starts in zero as initial condition for the three dynamics (roll, pitch and depth) and the vehicle tracks a desired reference. For the roll and pitch angles, a reference signal of 10 degrees was requested at time 15 s. For the depth dynamics, a reference signal of 20 cm is requested from time instant zero. The objective in these experiments is to show the vehicle’s performance from rest.
- Experiments B. This set of experiments was conducted for roll and pitch angles only. For both dynamics, the signal reference is a square trajectory with a first order low-pass filter. In these experiments the vehicle moves from rest to a reference of −5 degrees and after that it returns back to rest. The objective is to observe the vehicle’s performance when it is stabilized at zero, starting from a non-zero initial condition.
- Experiments C. In this test the vehicle was stabilized at a reference of 10 degrees in roll angle, during the test in two time instants a extra load of 200 g is placed in the vehicle (at one edge of the vehicle) and removed in approximately fifty seconds. This virtual change in system parameters generates a moment of in the center of gravity, opposite to the angle. The objective of this experiment is to show the robustness of the control strategy when an extra load is added to the vehicle. In this experiment the robust PD controller was tested only.
4.2.1. Simulation Results
Experiments A
4.2.2. Experimental Results
Experiments A
Experiments B
Experiments C
4.2.3. Guidelines for Control Parameters Tuning
Super Twisting Controller
- First, a not so large is chosen keeping and , since it was observed that a too large generates oscillations in the vehicle’s dynamics. The parameter affects the convergence velocity of the system.
- The next step is to select a with , since the behavior is similar to the proportional gain of a classical Proportional Integral Derivative (PID) controller, this was chosen to ensure that the convergence to the reference should be in a time no longer than 20 s.
- Finally, the gain is chosen, helping us to reduce the error in steady state.
Robust PD Controller
- First, a gain adjustment was made for the classic PD controller, the proportional gain is selected, large enough to make the system respond with .
- With proportional gain selected, a proportional gain was chosen to reduce overshoot in the dynamics response.
- Finally, a gain was selected for the robust term, which helps to compensate the equivalent disturbances . The parameter can be increased monotonically until a successfully performance is observed [51].
4.3. 3D Reconstruction
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Caccia, M.; Ferretti, R.; Odetti, A.; Ranieri, A.; Bruzzone, G.; Spirandelli, E.; Bruzzone, G. Marine robotics for sampling air-sea-ice interface in the Arctic region. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 7–12 April 2019; EGU General Assembly Conference Abstracts. p. 9429. [Google Scholar]
- Ignacio, L.C.; Victor, R.R.; Francisco, D.R.R.; Pascoal, A. Optimized design of an autonomous underwater vehicle, for exploration in the Caribbean Sea. Ocean Eng. 2019, 187, 106184. [Google Scholar] [CrossRef]
- He, Y.; Wang, D.B.; Ali, Z.A. A review of different designs and control models of remotely operated underwater vehicle. Meas. Control 2020, 53, 1561–1570. [Google Scholar] [CrossRef]
- Neira, J.; Sequeiros, C.; Huamanu, R.; Machaca, E.; Fonseca, P.; Nina, W. Review on Unmanned Underwater Robotics, Structure Designs, Materials, Sensors, Actuators, and Navigation Control. J. Robot. 2021, 2021, 5542920. [Google Scholar] [CrossRef]
- Capocci, R.; Dooly, G.; Omerdić, E.; Coleman, J.; Newe, T.; Toal, D. Inspection-Class Remotely Operated Vehicles—A Review. J. Mar. Sci. Eng. 2017, 5, 13. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Frost, A.; McMaster, A.; Saunders, K.; Lee, S. The development of a remotely operated vehicle (ROV) for aquaculture. Aquac. Eng. 1996, 15, 461–483. [Google Scholar] [CrossRef]
- Lygouras, J.; Lalakos, K.; Tsalides, P. THETIS: An underwater remotely operated vehicle for water pollution measurements. Microprocess. Microsyst. 1998, 22, 227–237. [Google Scholar] [CrossRef]
- Choi, H.; Hanai, A.; Choi, S.; Yuh, J. Development of an underwater robot, ODIN-III. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27 October–1 November 2003; Volume 1, pp. 836–841. [Google Scholar]
- Yuh, J. Design and Control of Autonomous Underwater Robots: A Survey. Auton. Robot. 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Yuh, J.; West, M. Underwater robotics. Adv. Robot. 2001, 15, 609–639. [Google Scholar] [CrossRef]
- Gomes, R.; Martins, A.; Sousa, A.; Sousa, J.; Fraga, S.; Pereira, F. A new ROV design: Issues on low drag and mechanical symmetry. In Proceedings of the Europe Oceans 2005, Brest, France, 20–23 June 2005; Volume 2, pp. 957–962. [Google Scholar]
- Vaganay, J.; Elkins, M.; Esposito, D.; O’Halloran, W.; Hover, F.; Kokko, M. Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results. In Proceedings of the OCEANS 2006, Singapore, 16–19 May 2006; pp. 1–6. [Google Scholar]
- Brundage, H.M.; Cooney, L.; Huo, E.; Lichter, H.; Oyebode, O.; Sinha, P.; Stanway, M.J.; Stefanov-Wagner, T.; Stiehl, K.; Walker, D. Design of an ROV to Compete in the 5th Annual MATE ROV Competition and Beyond. In Proceedings of the OCEANS 2006, Singapore, 16–19 May 2006; pp. 1–5. [Google Scholar]
- Vasilescu, I.; Kotay, K.; Rus, D.; Dunbabin, M.; Corke, P. Data Collection, Storage, and Retrieval with an Underwater Sensor Network. In Proceedings of the 3rd International Conference on Embedded Networked Sensor Systems, San Diego, CA, USA, 2–4 November 2005; SenSys ’05. pp. 154–165. [Google Scholar]
- Vasilescu, I.; Detweiler, C.; Doniec, M.; Gurdan, D.; Sosnowski, S.; Stumpf, J.; Rus, D. AMOUR V: A Hovering Energy Efficient Underwater Robot Capable of Dynamic Payloads. Int. J. Robot. Res. 2010, 29, 547–570. [Google Scholar] [CrossRef]
- Wang, S.; Chen, Z. Modeling of Two-Dimensionally Maneuverable Jellyfish-Inspired Robot Enabled by Multiple Soft Actuators. IEEE/ASME Trans. Mechatron. 2022, 27, 1998–2006. [Google Scholar] [CrossRef]
- Tong, R.; Wu, Z.; Chen, D.; Wang, J.; Du, S.; Tan, M.; Yu, J. Design and Optimization of an Untethered High-Performance Robotic Tuna. IEEE/ASME Trans. Mechatron. 2022, 27, 4132–4142. [Google Scholar] [CrossRef]
- Zhang, P.; Wu, Z.; Meng, Y.; Dong, H.; Tan, M.; Yu, J. Development and Control of a Bioinspired Robotic Remora for Hitchhiking. IEEE/ASME Trans. Mechatron. 2022, 27, 2852–2862. [Google Scholar] [CrossRef]
- Vu, M.T.; Le, T.H.; Thanh, H.L.N.N.; Huynh, T.T.; Van, M.; Hoang, Q.D.; Do, T.D. Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, W.; Li, Z.; Du, X.; Yan, Z. Three-Dimensional Trajectory Tracking of AUV Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Decoupling Control. J. Mar. Sci. Eng. 2023, 11, 959. [Google Scholar] [CrossRef]
- Gambhire, S.J.; Kishore, D.R.; Londhe, P.S.; Pawar, S.N. Review of sliding mode based control techniques for control system applications. Int. J. Dyn. Control 2021, 9, 363–378. [Google Scholar] [CrossRef]
- Yu, X.; Feng, Y.; Man, Z. Terminal Sliding Mode Control—An Overview. IEEE Open J. Ind. Electron. Soc. 2021, 2, 36–52. [Google Scholar] [CrossRef]
- Herrera, M.; Camacho, O.; Leiva, H.; Smith, C. An approach of dynamic sliding mode control for chemical processes. J. Process Control 2020, 85, 112–120. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Muñoz, F.; Espinoza, E.S.; González-Hernández, I.; Salazar, S.; Lozano, R. Robust Trajectory Tracking for Unmanned Aircraft Systems using a Nonsingular Terminal Modified Super-Twisting Sliding Mode Controller. J. Intell. Robot. Syst. 2019, 93, 55–72. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Zribi, M.; Sira, H.; Ngai, A. Static and dynamic sliding mode control schemes for a permanent magnet stepper motor. Int. J. Control 2001, 74, 103–117. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. A Lyapunov approach to second-order sliding mode controllers and observers. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861. [Google Scholar]
- Muñoz, F.; González-Hernández, I.; Salazar, S.; Espinoza, E.S.; Lozano, R. Second order sliding mode controllers for altitude control of a quadrotor UAS: Real-time implementation in outdoor environments. Neurocomputing 2017, 233, 61–71. [Google Scholar] [CrossRef]
- Vu, M.T.; Le Thanh, H.N.N.; Huynh, T.T.; Thang, Q.; Duc, T.; Hoang, Q.D.; Le, T.H. Station-Keeping Control of a Hovering Over-Actuated Autonomous Underwater Vehicle Under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Ángel García, M.; Manzanilla, A.; Suarez, A.E.Z.; Muñoz, F.; Salazar, S.; Lozano, R. Adaptive Non-singular Terminal Sliding Mode Control for an Unmanned Underwater Vehicle: Real-Time Experiments. Int. J. Control. Autom. Syst. 2020, 18, 615–628. [Google Scholar]
- Borlaug, I.L.G.; Gravdahl, J.T.; Sverdrup-Thygeson, J.; Pettersen, K.Y.; Loria, A. Trajectory Tracking for Underwater Swimming Manipulators using a Super Twisting Algorithm. Asian J. Control 2019, 21, 208–223. [Google Scholar] [CrossRef]
- Borlaug, I.L.G.; Pettersen, K.Y.; Gravdahl, J.T. Tracking Control of an Articulated Intervention Autonomous Underwater Vehicle in 6DOF Using Generalized Super-twisting: Theory and Experiments. IEEE Trans. Control Syst. Technol. 2021, 29, 353–369. [Google Scholar] [CrossRef]
- Manzanilla, A.; Ibarra, E.; Salazar, S.; Zamora, A.E.; Lozano, R.; Muñoz, F. Super-twisting integral sliding mode control for trajectory tracking of an Unmanned Underwater Vehicle. Ocean Eng. 2021, 234, 109164. [Google Scholar] [CrossRef]
- Nerkar, S.S.; Londhe, P.S.; Patre, B.M. Design of super twisting disturbance observer based control for autonomous underwater vehicle. Int. J. Dyn. Control 2021, 10, 306–322. [Google Scholar] [CrossRef]
- Odetti, A.; Bibuli, M.; Bruzzone, G.; Caccia, M.; Spirandelli, E.; Bruzzone, G. e-URoPe: A reconfgurable AUV/ROV for man-robot underwater cooperation. IFAC-PapersOnLine 2017, 50, 11203–11208. [Google Scholar] [CrossRef]
- Blond, M.; Simon, D.; Creuze, V.; Tempier, O. Optimal thrusters steering for dynamically reconfigurable underwater vehicles. Int. J. Syst. Sci. 2019, 50, 2348–2361. [Google Scholar] [CrossRef]
- Gu, S.; Guo, S.; Zheng, L. A highly stable and efficient spherical underwater robot with hybrid propulsion devices. Auton. Robot. 2020, 44, 759–771. [Google Scholar] [CrossRef]
- Muzammal, H.; Mehdi, S.A.; Ahmed Hanif, M.; Maurelli, F. Design and Fabrication of a Low-Cost 6 DoF Underwater Vehicle. In Proceedings of the 2021 European Conference on Mobile Robots (ECMR), Bonn, Germany, 31 August–3 September 2021; pp. 1–5. [Google Scholar]
- Kabanov, A.; Kramar, V.; Ermakov, I. Design and Modeling of an Experimental ROV with Six Degrees of Freedom. Drones 2021, 5, 113. [Google Scholar] [CrossRef]
- Elaff, I. Design and development of Spaiser remotely operated vehicle. J. Eng. Appl. Sci. 2022, 69, 14. [Google Scholar] [CrossRef]
- Marzbanrad, A.; Sharafi, J.; Eghtesad, M.; Kamali, R. Design, Construction and Control of a Remotely Operated Vehicle (ROV). In Proceedings of the ASME 2011 International Mechanical Engineering Congress & Exposition IMECE2011, Denver, CO, USA, 11–17 November 2011; pp. 1295–1304. [Google Scholar]
- Chin, L. Modeling and testing of hydrodynamic damping model for a complex-shaped remotely-operated vehicle for control. J. Mar. Sci. Appl. 2012, 11, 150–163. [Google Scholar] [CrossRef]
- Vedachalam, N.; Ramesh, S.; Subramanian, A.; Sathianarayanan, D.; Ramesh, R.; Harikrishnan, G.; Pranesh, S.B.; Doss Prakash, V.; Bala Naga Jyothi, V.; Chowdhury, T.; et al. Design and development of Remotely Operated Vehicle for shallow waters and polar research. In Proceedings of the 2015 IEEE Underwater Technology (UT), Chennai, India, 23–25 February 2015; pp. 1–5. [Google Scholar]
- Hanff, H.; Kloss, P.; Wehbe, B.; Kampmann, P.; Kroffke, S.; Sander, A.; Firvida, M.B.; von Einem, M.; Bode, J.F.; Kirchner, F. AUVx—A novel miniaturized autonomous underwater vehicle. In Proceedings of the OCEANS 2017-Aberdeen, New York, NY, USA, 5–9 June 2017; pp. 1–10. [Google Scholar]
- Gelli, J.; Meschini, A.; Monni, N.; Pagliai, M.; Ridolfi, A.; Marini, L.; Allotta, B. Development and Design of a Compact Autonomous Underwater Vehicle: Zeno AUV. IFAC-PapersOnLine 2018, 51, 20–25. [Google Scholar] [CrossRef]
- Eidsvik, O.; Schjølberg, I. Determination of Hydrodynamic Parameters for Remotely Operated Vehicles. In Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Republic of Korea, 19–24 June 2016; p. V007T06A025. [Google Scholar] [CrossRef]
- DNV-RP-H103: Modelling and Analysis of Marine Operations. DNV GL. 2010. Available online: https://rules.dnv.com/docs/pdf/dnvpm/codes/docs/2010-04/RP-H103.pdf (accessed on 17 August 2023).
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Liu, H.; Li, D.; Xi, J.; Zhong, Y. Robust attitude controller design for miniature quadrotors. Int. J. Robust Nonlinear Control 2016, 26, 681–696. [Google Scholar] [CrossRef]
- Morfin-Santana, A.; Palacios, F.M.; González-Hernández, I.; Espinoza Quesada, E.S.; Salazar Cruz, S. Robust control for octorotor Unmanned Aerial Vehicle in H-Configuration. In Proceedings of the 2018 15th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 5–7 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Herman, P. Decoupled PD set-point controller for underwater vehicles. Ocean Eng. 2009, 36, 529–534. [Google Scholar] [CrossRef]
- Campos, E.; Chemori, A.; Creuze, V.; Torres, J.; Lozano, R. Saturation based nonlinear depth and yaw control of underwater vehicles with stability analysis and real-time experiments. Mechatronics 2017, 45, 49–59. [Google Scholar] [CrossRef]
- Guerrero, J.; Torres, J.; Zúñiga, M. Improvement of the PD controller Based on the Disturbance Observer for Trajectory Tracking in Underwater Vehicles. In Proceedings of the 2022 19th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 9–11 November 2022; pp. 1–7. [Google Scholar]
- Zhong, Y.S. Robust output tracking control of SISO plants with multiple operating points and with parametric and unstructured uncertainties. Int. J. Control 2002, 75, 219–241. [Google Scholar] [CrossRef]
- Liu, H.; Peng, F.; Lewis, F.L.; Wan, Y. Robust Tracking Control for Tail-Sitters in Flight Mode Transitions. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2023–2035. [Google Scholar] [CrossRef]
- Liu, H.; Lyu, Y.; Lewis, F.L.; Wan, Y. Robust time-varying formation control for multiple underwater vehicles subject to nonlinearities and uncertainties. Int. J. Robust Nonlinear Control 2019, 29, 2712–2724. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | N. Thrusters | DOF | Vision Sys. | UUV Type | Company |
|---|---|---|---|---|---|
| BlueRov Heavy | 8 | 6 | Monocular | ROV/AUV | Blue Robotics |
| DTG3ROV | 3 | 3 | Monocular | ROV | Deep Trekker |
| PIVOT ROV | 6 | 5 | Monocular | ROV | Deep Trekker |
| REVOLUTION ROV | 6 | 5 | Monocular | ROV | Deep Trekker |
| GLADIUS MINI S | 5 | 5 | Monocular | ROV | Chasing |
| CHASING M2 PRO Max | 8 | 6 | Monocular | ROV | Chasing |
| Boxfish ROV | 8 | 6 | Monocular | ROV | Boxfish |
| Dragonfish 200H | 6 | 5 | Monocular | ROV | THOR robotics |
| Falcon | 5 | 4 | Monocular | ROV | SAAB Seaeye |
| Lynx | 6 | 5 | Monocular | ROV | SAAB Seaeye |
| Name | Number of Thrusters | DOF | Vision | Type of UUV | Year |
|---|---|---|---|---|---|
| Ariana-I ROV [43] | 6 | 6 | Monocular | ROV | 2011 |
| RRC ROV [44] | 4 | 6 | N.I. | ROV-AUV | 2012 |
| Kaxan ROV | 4 | 4 | Monocular | ROV | 2013 |
| PROVe 500 [45] | 4 | 4 | Monocular | ROV-AUV | 2015 |
| AUVx [46] | 5 | 3 | Monocular | AUV | 2017 |
| e-URoPe [37] | 8 | 5 | Monocular | ROV-AUV | 2017 |
| Zeno AUV [47] | 8 | 6 | Monocular | AUV | 2018 |
| SUR IV [39] | 4 Hybrid | 4 | N.I. | AUV | 2020 |
| SevROV [41] | 6 | 6 | N.I. | ROV | 2021 |
| Spaiser [42] | 7 | 6 | Monocular | ROV-AUV | 2022 |
| Parameters | X Axis | Y Axis | Z Axis |
|---|---|---|---|
| Principal axes and principal moments of inertia (kg/m2) | Ix = (0,0,1) Px = 0.511 | Iy = (1,−1,0) Py = 0.947 | Iz = (0,1,0) Pz = 1.157 |
| Moments of inertia taken at the CM (kg/m2) | Lxx = 0.947 Lyx = −0.001 Lzx = −0.000049 | Lxy = −0.001 Lyy = 1.157 Lzy = 0.000123 | Lxz = −0.000049 Lyz = 0.0001 Lzz = 0.511 |
| Moments of inertia taken at the coordinate system (kg/m2) | Ixx = 0.947 Iyx = −0.001 Izx = −0.000076 | Ixy = −0.001 Iyy = 1.157 Izy = 0.0001 | Ixz = −0.00007 Iyz = 0.0001 Izz = 0.511 |
| Center of mass (mm) | X = −1.99 | Y = −1.36 | Z = 0.5 |
| DoF | Added Mass | Value |
|---|---|---|
| Surge | 15.4656 | |
| Sway | 14.8887 | |
| Heave | 18.5967 | |
| Roll | 0.5527 | |
| Pitch | 0.3153 | |
| Yaw | 0.6685 |
| DoF | Linear Damping | Value | Quadratic Damping | Value |
|---|---|---|---|---|
| Surge | 11.6982 | 73.1138 | ||
| Sway | 10.7309 | 67.0684 | ||
| Heave | 19.4981 | 121.8630 | ||
| Roll | 0.3151 | 1.1730 | ||
| Pitch | 0.3122 | 0.4357 | ||
| Yaw | 0.6240 | 0.8707 |
| Thruster | Roll | Pitch | Yaw | Vertical | Forward | Lateral |
|---|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 1 | ||
| 2 | 1 | 1 | 1 | |||
| 3 | 1 | 1 | 1 | 1 | ||
| 4 | 1 | 1 | 1 | |||
| 5 | 1 | 1 | 1 | 1 | 1 | |
| 6 | 1 | 1 | ||||
| 7 | 1 | |||||
| 8 | 1 | 1 |
| 154 | 237.5 | −115 | |
| 154 | −237.5 | −115 | |
| 154 | −237.5 | 115 | |
| 154 | 237.5 | 115 | |
| −154 | 237.5 | −115 | |
| −154 | −237.5 | −115 | |
| −154 | −237.5 | 115 | |
| −154 | 237.5 | 115 |
| Simulation Gains | Experimental Gains | |||||
|---|---|---|---|---|---|---|
| Dynamic | ||||||
| z | 0.8 | 1.8 | 0.1 | 0.4 | 4 | 0.6 |
| 0.4 | 0.1 | 0.01 | 0.6 | 1.5 | 0.4 | |
| 0.4 | 0.15 | 0.02 | 0.5 | 3.5 | 0.8 | |
| Simulation Gains | Experimental Gains | |||||
|---|---|---|---|---|---|---|
| Dynamic | ||||||
| z | 3 | 1.5 | 0.7 | 1.5 | 0.5 | 0.3 |
| 0.9 | 0.35 | 0.5 | 8 | 1.4 | 1 | |
| 0.5 | 0.25 | 0.5 | 2.5 | 0.5 | 1 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garcia-Nava, S.; García-Rangel, M.A.; Zamora-Suárez, Á.E.; Manzanilla-Magallanes, A.; Muñoz, F.; Lozano, R.; Serrano-Almeida, A. Development of a 6 Degree of Freedom Unmanned Underwater Vehicle: Design, Construction and Real-Time Experiments. J. Mar. Sci. Eng. 2023, 11, 1744. https://doi.org/10.3390/jmse11091744
Garcia-Nava S, García-Rangel MA, Zamora-Suárez ÁE, Manzanilla-Magallanes A, Muñoz F, Lozano R, Serrano-Almeida A. Development of a 6 Degree of Freedom Unmanned Underwater Vehicle: Design, Construction and Real-Time Experiments. Journal of Marine Science and Engineering. 2023; 11(9):1744. https://doi.org/10.3390/jmse11091744
Chicago/Turabian StyleGarcia-Nava, Salatiel, Miguel Angel García-Rangel, Ángel Eduardo Zamora-Suárez, Adrian Manzanilla-Magallanes, Filiberto Muñoz, Rogelio Lozano, and Agnelo Serrano-Almeida. 2023. "Development of a 6 Degree of Freedom Unmanned Underwater Vehicle: Design, Construction and Real-Time Experiments" Journal of Marine Science and Engineering 11, no. 9: 1744. https://doi.org/10.3390/jmse11091744