
Illumination Adaptive Multi-Scale Water Surface Object Detection with Intrinsic Decomposition Augmentation

Abstract
:1. Introduction
1.1. Background
1.2. Contributions
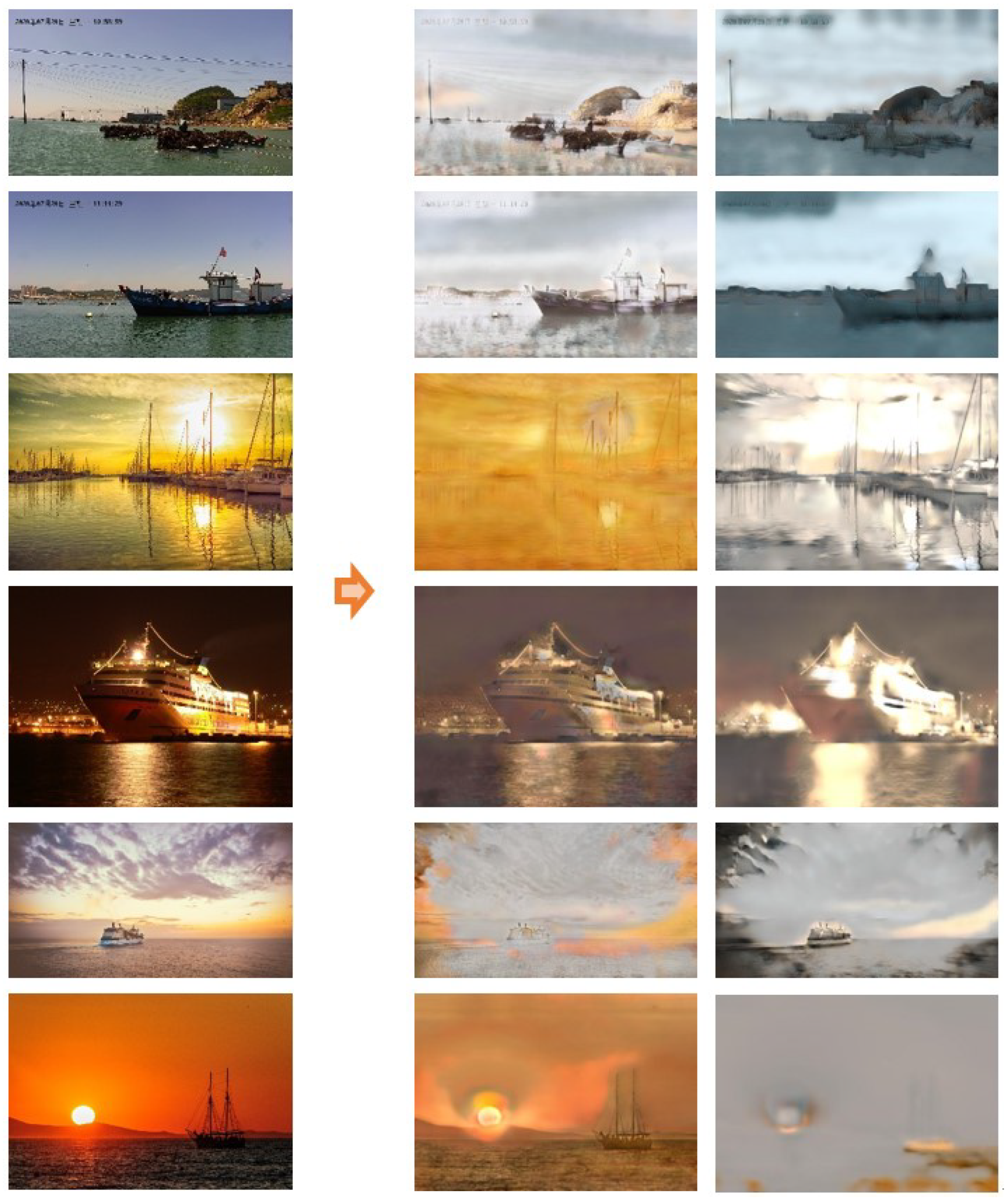
- To deal with the harsh and complex illumination condition on water surface scenes, we introduce intrinsic decomposition as a data augmentation method to enable the object detection network to adapt to the harsh illumination condition on water surface scenes. And the results of experiments demonstrate that it is an effective way to handle the complex illumination condition without any extra calculation while detecting. For the lack of high quality annotated intrinsic decomposition datasets, we propose an unsupervised method named intrinsic decomposition generative adversarial network (IDGAN) to address this task. The natural images in the dataset are decomposed to reflectance and shading to obtain more prior information to achieve illumination adapting.
- To obtain better performance while detecting the objects with extreme scale, we proposed a multi-scale feature fusion object detection network (MFFDet) to improve the multi-scale detection effect. The network take use a deeper CSPDarknet53 to obtain more effective semantic features. And a multi-scale feature fusion neck with spatial pyramid pooling (SPP) blocks and improved bidirectional feature pyramid network (BiFPN) is used to improve the multi-scale detection performance.
- To obtain a model with better generalization, an improved model ensembling method Weighted-SWA is proposed, which utilizes entropy evaluation to weight the models to ensure that the models converge to the optimal solution region. The Weighted-SWA can enhance the generalization of the model by ensuring that the model is located in the smooth region of the solution space.
1.3. Organization
2. Related Works
2.1. General Object Detection Methods
2.2. Object Detection Methods for Water Surface Scenes
2.3. Intrinsic Image Decomposition
3. Method
3.1. Overall Architecture
3.2. Intrinsic Decomposition Generative Adversarial Network
3.3. Multi-Scale Feature Fusion Object Detection Network
3.3.1. Backbone
3.3.2. Neck
3.3.3. Head
3.4. Weighted-SWA
- Performance evaluation of checkpoint. When the loss function basically does not show a decreasing trend during the training process, it continues to be trained for an additional period of time using the cyclic learning rate. Then, additional m checkpoint models are obtained and evaluated on the dataset to obtain their performance on the n categories.
- Standardization of data for every indicator. The indicators used in the index matrix usually include positive and negative indicators. But there exists no negative indicator in the performance of the models, for what only positive indicators are used. To standardize the indicators, . Then, use Z-score to obtain the proportion of model i in indicator j, , where is the standard deviation .
- Calculate the entropy and entropy redundancy. The information entropy of indicator j is , where K is a positive number. The entropy maximizes when a system is completely disordered. At this point for the given j all the same and . Here, takes a great value, i.e., . The entropy redundancy of indicator j is , representing the effectiveness of the indicator.
- Calculate the weight of indicators and the comprehensive evaluation of the models. The greater the entropy redundancy of a certain indicator, the greater its importance for evaluation. The weight of indicator j is . And the comprehensive evaluation of model i is .
- Get the final model. The internal parameters of the m checkpoint models are weighted by the comprehensive evaluation f and synthesized according to the integrated evaluation value to determine the optimal model.
4. Experiment
4.1. Dataset Preparation
4.2. Experiment on Water Surface Object Detection Dataset
4.3. Ablation Studies
4.4. Practical Experiment on USV
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Liu, Y.; Oerlemans, A.; Lao, S.; Wu, S.; Lew, M.S. Deep learning for visual understanding: A review. Neurocomputing 2016, 187, 27–48. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Hawaii, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Ma, Z.; Wan, Y.; Liu, J.; An, R.; Wu, L. A Kind of Water Surface Multi-Scale Object Detection Method Based on Improved YOLOv5 Network. Mathematics 2023, 11, 2936. [Google Scholar] [CrossRef]
- Xu, Z.; Huo, Y.; Liu, K.; Liu, S. Detection of ship targets in photoelectric images based on an improved recurrent attention convolutional neural network. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720912959. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Sun, D.; Wang, R.; Zhu, C.; Liu, B. Ship target detection based on improved YOLO network. Math. Probl. Eng. 2020, 2020, 6402149. [Google Scholar] [CrossRef]
- Li, Y.; Guo, J.; Guo, X.; Liu, K.; Zhao, W.; Luo, Y.; Wang, Z. A novel target detection method of the unmanned surface vehicle under all-weather conditions with an improved YOLOV3. Sensors 2020, 20, 4885. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, D.; Zhang, Y.; Cheng, X.; Zhang, M.; Wu, C. Deep learning for autonomous ship-oriented small ship detection. Saf. Sci. 2020, 130, 104812. [Google Scholar] [CrossRef]
- Qi, L.; Li, B.; Chen, L.; Wang, W.; Dong, L.; Jia, X.; Huang, J.; Ge, C.; Xue, G.; Wang, D. Ship target detection algorithm based on improved faster R-CNN. Electronics 2019, 8, 959. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Zhang, Y.; Zhang, Z.; Shen, J.; Wang, H. Real-time water surface object detection based on improved faster R-CNN. Sensors 2019, 19, 3523. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Syed, D.F. Computationally Efficient Object Detection Strategy from Water Surfaces with Specularity Removal. Ph.D. Thesis, Arizona State University, Tempe, AZ, USA, 2021. [Google Scholar]
- Yang, Q.; Tang, J.; Ahuja, N. Efficient and robust specular highlight removal. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 37, 1304–1311. [Google Scholar] [CrossRef] [PubMed]
- Yang, Q.; Wang, S.; Ahuja, N. Real-time specular highlight removal using bilateral filtering. In Proceedings of the Computer Vision–ECCV 2010: 11th European Conference on Computer Vision, Crete, Greece, 5–11 September 2010; pp. 87–100. [Google Scholar]
- Suo, J.; An, D.; Ji, X.; Wang, H.; Dai, Q. Fast and high quality highlight removal from a single image. IEEE Trans. Image Process. 2016, 25, 5441–5454. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shen, H.L.; Zheng, Z.H. Real-time highlight removal using intensity ratio. Appl. Opt. 2013, 52, 4483–4493. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fu, G.; Zhang, Q.; Zhu, L.; Li, P.; Xiao, C. A multi-task network for joint specular highlight detection and removal. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Online, 19–25 June 2021; pp. 7752–7761. [Google Scholar]
- Shi, J.; Dong, Y.; Su, H.; Yu, S.X. Learning non-lambertian object intrinsics across shapenet categories. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Hawaii, HI, USA, 21–26 July 2017; pp. 1685–1694. [Google Scholar]
- Yi, R.; Tan, P.; Lin, S. Leveraging multi-view image sets for unsupervised intrinsic image decomposition and highlight separation. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 12685–12692. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; Volume 28. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Cai, Z.; Vasconcelos, N. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6154–6162. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H.; He, T. Fcos: Fully convolutional one-stage object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9627–9636. [Google Scholar]
- Law, H.; Deng, J. Cornernet: Detecting objects as paired keypoints. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 734–750. [Google Scholar]
- Zhou, X.; Wang, D.; Krähenbühl, P. Objects as points. arXiv 2019, arXiv:1904.07850. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-end object detection with transformers. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; pp. 213–229. [Google Scholar]
- Zhu, X.; Su, W.; Lu, L.; Li, B.; Wang, X.; Dai, J. Deformable detr: Deformable transformers for end-to-end object detection. arXiv 2020, arXiv:2010.04159. [Google Scholar]
- Beal, J.; Kim, E.; Tzeng, E.; Park, D.H.; Zhai, A.; Kislyuk, D. Toward transformer-based object detection. arXiv 2020, arXiv:2012.09958. [Google Scholar]
- An, Q.; Pan, Z.; Liu, L.; You, H. DRBox-v2: An improved detector with rotatable boxes for target detection in SAR images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8333–8349. [Google Scholar] [CrossRef]
- Li, X.; Tian, M.; Kong, S.; Wu, L.; Yu, J. A modified YOLOv3 detection method for vision-based water surface garbage capture robot. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420932715. [Google Scholar] [CrossRef]
- Zhang Sr, Y.; Shu Sr, J.; Hu Sr, L.; Zhou Sr, Q.; Du Sr, Z. A ship target tracking algorithm based on deep learning and multiple features. In Proceedings of the Twelfth International Conference on Machine Vision (ICMV 2019), Amsterdam, Netherlands, 16–18 November 2019; Volume 11433, pp. 19–26. [Google Scholar]
- Jie, Y.; Leonidas, L.; Mumtaz, F.; Ali, M. Ship detection and tracking in inland waterways using improved YOLOv3 and Deep SORT. Symmetry 2021, 13, 308. [Google Scholar] [CrossRef]
- Land, E.H.; McCann, J.J. Lightness and retinex theory. Josa 1971, 61, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Barrow, H.; Tenenbaum, J.; Hanson, A.; Riseman, E. Recovering intrinsic scene characteristics. Comput. Vis. Syst 1978, 2, 2. [Google Scholar]
- Rother, C.; Kiefel, M.; Zhang, L.; Schölkopf, B.; Gehler, P. Recovering intrinsic images with a global sparsity prior on reflectance. In Proceedings of the Advances in Neural Information Processing Systems, Granada, Spain, 12–17 December 2011; Volume 24. [Google Scholar]
- Shen, L.; Yeo, C. Intrinsic images decomposition using a local and global sparse representation of reflectance. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 697–704. [Google Scholar]
- Shen, L.; Tan, P.; Lin, S. Intrinsic image decomposition with non-local texture cues. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–7. [Google Scholar]
- Zhao, Q.; Tan, P.; Dai, Q.; Shen, L.; Wu, E.; Lin, S. A closed-form solution to retinex with nonlocal texture constraints. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1437–1444. [Google Scholar] [CrossRef] [PubMed]
- Fan, Q.; Yang, J.; Hua, G.; Chen, B.; Wipf, D. Revisiting deep intrinsic image decompositions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8944–8952. [Google Scholar]
- Li, Z.; Snavely, N. Cgintrinsics: Better intrinsic image decomposition through physically-based rendering. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 371–387. [Google Scholar]
- Narihira, T.; Maire, M.; Yu, S.X. Direct intrinsics: Learning albedo-shading decomposition by convolutional regression. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; p. 2992. [Google Scholar]
- Butler, D.J.; Wulff, J.; Stanley, G.B.; Black, M.J. A naturalistic open source movie for optical flow evaluation. In Proceedings of the Computer Vision–ECCV 2012: 12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; pp. 611–625. [Google Scholar]
- Chang, A.X.; Funkhouser, T.; Guibas, L.; Hanrahan, P.; Huang, Q.; Li, Z.; Savarese, S.; Savva, M.; Song, S.; Su, H.; et al. Shapenet: An information-rich 3d model repository. arXiv 2015, arXiv:1512.03012. [Google Scholar]
- Grosse, R.; Johnson, M.K.; Adelson, E.H.; Freeman, W.T. Ground truth Dataset and Baseline Evaluations for Intrinsic Image Algorithms. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 2335–2342. [Google Scholar]
- Janner, M.; Wu, J.; Kulkarni, T.D.; Yildirim, I.; Tenenbaum, J. Self-supervised intrinsic image decomposition. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Zhang, Q.; Zhou, J.; Zhu, L.; Sun, W.; Xiao, C.; Zheng, W.S. Unsupervised intrinsic image decomposition using internal self-similarity cues. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 9669–9686. [Google Scholar] [CrossRef]
- Lettry, L.; Vanhoey, K.; Van Gool, L. Unsupervised deep single-image intrinsic decomposition using illumination-varying image sequences. Comput. Graph. Forum 2018, 37, 409–419. [Google Scholar] [CrossRef] [Green Version]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. Commun. ACM 2020, 63, 139–144. [Google Scholar] [CrossRef]
- Yun, S.; Han, D.; Oh, S.J.; Chun, S.; Choe, J.; Yoo, Y. Cutmix: Regularization strategy to train strong classifiers with localizable features. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 6023–6032. [Google Scholar]
- Chen, H.; Zhao, L.; Zhang, H.; Wang, Z.; Zuo, Z.; Li, A.; Xing, W.; Lu, D. Diverse image style transfer via invertible cross-space mapping. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021; pp. 14860–14869. [Google Scholar]
- Huang, X.; Liu, M.Y.; Belongie, S.; Kautz, J. Multimodal unsupervised image-to-image translation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 172–189. [Google Scholar]
- Sanakoyeu, A.; Kotovenko, D.; Lang, S.; Ommer, B. A style-aware content loss for real-time hd style transfer. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 698–714. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Rosenblatt, F. The perceptron: A probabilistic model for information storage and organization in the brain. Psychol. Rev. 1958, 65, 386. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Belongie, S. Arbitrary style transfer in real-time with adaptive instance normalization. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 1501–1510. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. Efficientdet: Scalable and efficient object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 10781–10790. [Google Scholar]
- Neubeck, A.; Van Gool, L. Efficient non-maximum suppression. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; Volume 3, pp. 850–855. [Google Scholar]
- Izmailov, P.; Podoprikhin, D.; Garipov, T.; Vetrov, D.; Wilson, A.G. Averaging weights leads to wider optima and better generalization. arXiv 2018, arXiv:1803.05407. [Google Scholar]
- Zhou, Z.; Sun, J.; Yu, J.; Liu, K.; Duan, J.; Chen, L.; Chen, C.P. An image-based benchmark dataset and a novel object detector for water surface object detection. Front. Neurorobotics 2021, 15, 723336. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Huang, D.; Wang, Y. Receptive field block net for accurate and fast object detection. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 385–400. [Google Scholar]
- Zhao, Q.; Sheng, T.; Wang, Y.; Tang, Z.; Chen, Y.; Cai, L.; Ling, H. M2det: A single-shot object detector based on multi-level feature pyramid network. In Proceedings of the AAAI Conference on Artificial Intelligence, Hawaii, HI, USA, 27 January–1 February 2019; Volume 33, pp. 9259–9266. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Images | Instances |
|---|---|---|
| boat | 317 | 677 |
| ship | 467 | 868 |
| ball | 170 | 210 |
| bridge | 69 | 69 |
| harbor | 70 | 77 |
| animal | 198 | 237 |
| total | 977 | 2138 |
| Method | FPS | mAP | ||||||
|---|---|---|---|---|---|---|---|---|
| Boat | Ship | Ball | Bridge | Harbor | Animal | |||
| SSD | 43.44 | 29.5% | 18% | 47% | 14% | 32% | 39% | 27% |
| RetinaNet | 34.22 | 23.7% | 11% | 30% | 18% | 17% | 47% | 19% |
| Yolov3 | 45.81 | 31.0% | 17% | 35% | 21% | 35% | 55% | 23% |
| RFBNet | 44.97 | 25.7% | 12% | 36% | 17% | 21% | 46% | 22% |
| M2Det | 41.11 | 29.2% | 13% | 45% | 22% | 24% | 44% | 27% |
| CenterNet | 44.09 | 31.0% | 19% | 45% | 31% | 20% | 45% | 26% |
| EfficientDet | 29.11 | 25.7% | 15% | 38% | 15% | 21% | 45% | 20% |
| Yolov4 | 46.07 | 31.8% | 17% | 37% | 21% | 33% | 59% | 24% |
| Yolov3-2SMA | 50.19 | 35.8% | 13% | 45% | 21% | 37% | 72% | 27% |
| ShipYolo | 50.09 | 29.8% | 10% | 41% | 17% | 29% | 54% | 28% |
| MFFDET-IDGAN | 44.11 | 46.0% | 27% | 67% | 41% | 44% | 69% | 28% |
| Method | Cutmix | IDGAN | ||
|---|---|---|---|---|
| FPS | mAP | FPS | mAP | |
| Yolov3 | 45.81 | 31.0% | 45.87 | 38.6% |
| CenterNet | 44.09 | 31.0% | 44.30 | 37.1% |
| Yolov4 | 46.07 | 31.8% | 46.88 | 37.8% |
| Yolov3-2SMA | 50.19 | 35.8% | 49.87 | 41.3% |
| Method | Original Algorithm | SWA | Weighted-SWA |
|---|---|---|---|
| mAP | mAP | mAP | |
| Yolov3 | 31.0% | 32.3% | 33.8% |
| CenterNet | 31.0% | 31.2% | 31.9% |
| Yolov4 | 31.8% | 32.9% | 34.0% |
| Yolov3-2SMA | 35.8% | 36.2% | 37.2% |
| +2 SPP | - | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| + Improced BiFPN | - | - | ✓ | ✓ | ✓ | ✓ | ✓ |
| + IDGAN | - | - | - | - | ✓ | ✓ | ✓ |
| + Weighted-SWA | - | - | - | - | - | ✓ | ✓ |
| Backbone→CSPDarknet53 | - | - | - | - | - | - | ✓ |
| mAP | 24.9% | 27.6% | 33.8% | 35.7% | 43.1% | 46.0% | 42.8% |
| Method | Total Frames | Valid Frames | mAP | FPS |
|---|---|---|---|---|
| Yolov3 | 600 | 587 | 88.6% | 8.58 |
| CenterNet | 600 | 587 | 79.6% | 8.91 |
| Yolov4 | 600 | 587 | 90.9% | 9.22 |
| Yolov3-2SMA | 600 | 587 | 87.2% | 10.03 |
| MFFDet-IDGAN | 600 | 587 | 91.1% | 8.87 |
| Method | Total Frames | Valid Frames | mAP | FPS |
|---|---|---|---|---|
| Yolov3 | 1700 | 1450 | 90.2% | 8.44 |
| CenterNet | 1700 | 1450 | 87.9% | 8.95 |
| Yolov4 | 1700 | 1450 | 91.0% | 9.29 |
| Yolov3-2SMA | 1700 | 1450 | 89.6% | 9.97 |
| MFFDet-IDGAN | 1700 | 1450 | 94.5% | 8.80 |
| Method | Total Frames | Valid Frames | mAP | FPS |
|---|---|---|---|---|
| Yolov3 | 725 | 725 | 89.7% | 8.48 |
| CenterNet | 725 | 725 | 86.2% | 9.01 |
| Yolov4 | 725 | 725 | 92.1% | 9.27 |
| Yolov3-2SMA | 725 | 725 | 89.2% | 9.93 |
| MFFDet-IDGAN | 725 | 725 | 96.2% | 8.82 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Li, Z.; Sun, J.; Xu, L.; Zhou, X. Illumination Adaptive Multi-Scale Water Surface Object Detection with Intrinsic Decomposition Augmentation. J. Mar. Sci. Eng. 2023, 11, 1485. https://doi.org/10.3390/jmse11081485
Zhou Z, Li Z, Sun J, Xu L, Zhou X. Illumination Adaptive Multi-Scale Water Surface Object Detection with Intrinsic Decomposition Augmentation. Journal of Marine Science and Engineering. 2023; 11(8):1485. https://doi.org/10.3390/jmse11081485
Chicago/Turabian StyleZhou, Zhiguo, Zeming Li, Jiaen Sun, Limei Xu, and Xuehua Zhou. 2023. "Illumination Adaptive Multi-Scale Water Surface Object Detection with Intrinsic Decomposition Augmentation" Journal of Marine Science and Engineering 11, no. 8: 1485. https://doi.org/10.3390/jmse11081485