


Theoretical Analysis Method for Roll Motion of Popup Data Communication Beacons

Abstract
:1. Introduction
2. Theoretical Calculations of the Roll Motion
- (1)
- The fluid is a non-viscous, incompressible ideal fluid.
- (2)
- The motion of fluid particles is a non-rotating potential flow motion.
- (3)
2.1. Sea State and Wave-Level Standards
2.2. Establishment of Differential Equations for Roll Motion
- (1)
- The changes in the surrounding flow field caused by the spatial distribution of the cylinder are ignored.
- (2)
- The flow field around cylindrical microelements are two-dimensional.
- (3)
- The direction of the wave flow force and the direction of movement of the cylinder are perpendicular to the axis.
2.2.1. Nonlinearity of the Recovery Moment
2.2.2. Determination of Wave Flow Force
2.2.3. Nonlinearity of the Damping Moment
2.2.4. Correction of the Moment of Inertia
2.3. Analysis of Theoretical Calculation Results
3. Simulation and Experimentation
3.1. Hydrodynamic Simulation
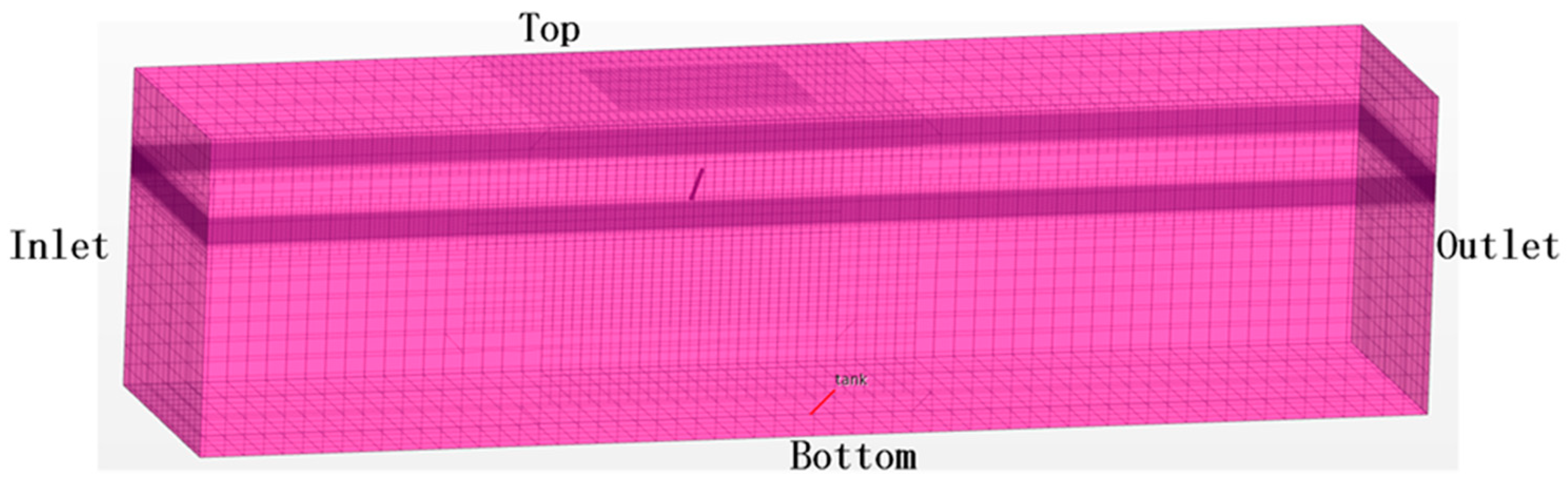
3.1.1. Calculation Area
- (1)
- Background computational domain: The STAR-CCM+ simulation software automatically converts the wavelength to 9.03 m, while the PDCB has a diameter of 100 mm. PDCB is a small-scale object (λ/D ≈ 90 > 5), and its influence on the flow field is negligible. Thus, the x-direction, y-direction, and z-direction lengths of the background computational domain were set as 180 D, 50 D, and 50 D, respectively, and the center of mass of the PDCB model was located in the center of the computational domain to minimize the influence of the PDCB on the flow field of the background computational domain.
- (2)
- Background local encryption computational domain: The size of the background computational domain differs greatly from that of the PDCB. The local encryption method can avoid the problem of excessive calculation error and divergence; in addition, it can save computing resources. Therefore, the x-direction, y-direction, and z-direction lengths of the background local encryption computational domain were set as 20 D, 20 D of the diameter, and 3 m (approximately thrice the length of the PDCB), respectively. To reduce the difficulty of grid setup, the center of mass was located in the center of the computational domain.
- (3)
- Component grid computational domain: The overset grid is composed of the background grid and the component grid overlapping with each other. They overlap in space, but there is no connection relationship. As such, a connection relationship must be established through operations such as grid digging and interpolation. The overset grid area must be detailed in advance to provide a uniform, high-quality mesh that is otherwise prone to isolated cells. Therefore, the x-direction, y-direction, and z-direction lengths of this computational domain were set as 10 D, 10 D, and 2 m, respectively. The Boolean operation was used to accomplish the digging process.
- (4)
- Partial mesh local encryption computational domain: Setting this area can further improve the calculation accuracy of interactions. Thus, the x-direction, y-direction, and z-direction lengths of this computational domain were set as 10 D, 10 D, and 1.5 m, respectively.
- (5)
- Free-surface computational domain: This computational domain is used for the local refinement of the background domain mesh. The x-direction and y-direction lengths of the free-surface computational domain must be consistent with the background computational domain. Because the average wave height of the sea state is 0.183 m, the high z-plane of this computational domain was set as 0.187 m above the water surface, and the low z-plane was set as 0.212 m below the water surface. Setting the computational domain in this manner offers three advantages: the computational domain can cover two wave heights, the waterplane is approximately in the middle of this region, and the computational domain height is rounded off to facilitate grid division.
3.1.2. Mesh Model
- (1)
- Background grid settings: Set the base size as 1 m and the minimum size as 0.05 m, and the generated background mesh will automatically generate a mesh with a size between 0.05 m and 1 m according to the conditions. This setting can achieve the purpose of saving computing resources and is convenient to adapt to the free-surface mesh.
- (2)
- Background grid local encryption settings: By using the trimmer grid method, the grid was set as isotropic, and the absolute size was set as 0.1 m. The grid has an integer multiple relationship with the maximum absolute size of the background grid.
- (3)
- Partial grid settings: the surface mesh size was set as 0.005 m, which is equivalent to dividing the buoy into 20 grids along the diameter direction. The surface mesh has an integer multiple relationship with the background local encryption mesh, which facilitates data transmission. The overset mesh method requires high interpolation accuracy and requires the use of a double-precision solver. While the PDCB model is relatively simple, the use of a linear solver can greatly save computing resources while ensuring high accuracy.
- (4)
- Partial mesh local encryption settings: The absolute x-direction and y-direction lengths were set as 0.005 m, which is consistent with the grid size of the surface of the PDCB. As can be seen in Figure 6, the grid size in the z-direction can be appropriately increased under the floating condition; thus, the absolute size of the grid in the z-direction was set as 0.02 m. Setting this area can further improve the computational accuracy of fluid–structure interactions. The local encryption grid exhibits a hierarchical relationship with the partial mesh, background local encryption grid, and background mesh, which aids in realizing data transmission and ensures the convergence of the calculation results. The local encryption grid and the free-surface grid exhibit an overlapping mesh relationship, which is conducive to the direct calculation of the interaction between the water surface wave and the PDCB.
- (5)
- Free-surface mesh settings: Typically, 10–30 grids and 80–120 grids are set in the wave height direction and wavelength direction, respectively. The average wave height of the sea state is 0.183 m, and the average period is 2.4 s. STAR-CCM+ numerical simulation software can automatically convert the wavelength to 9.03 m. In this study, 18–19 grids were used to split the wave height and 90–91 grids were used to divide the wavelength so that each grid was 0.01 m in the wave height direction and 0.1 m in the wavelength direction, which aids in data transmission. The fluid domain length, width and height are 35 m × 8 m × 9 m.
3.1.3. Physical Model
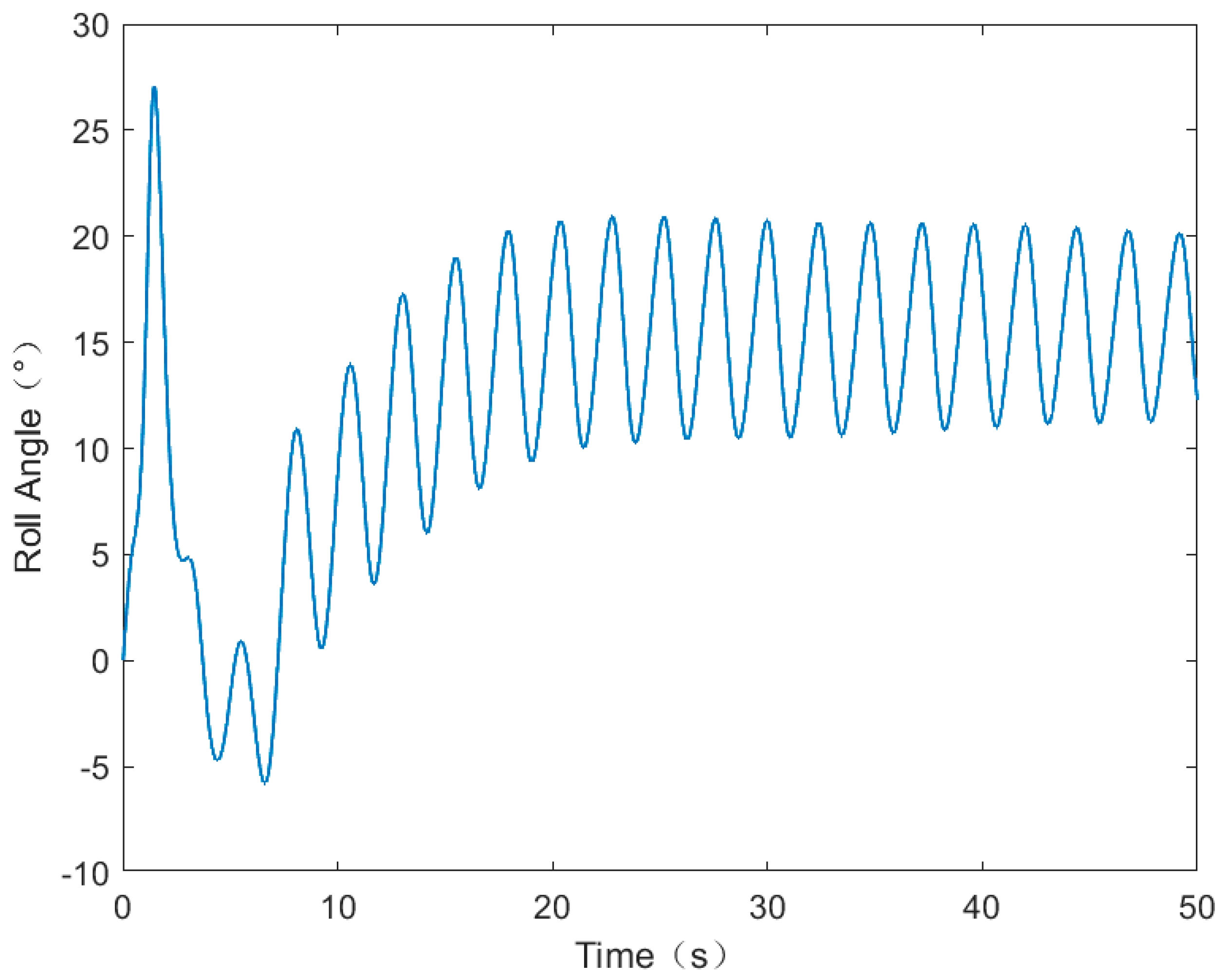
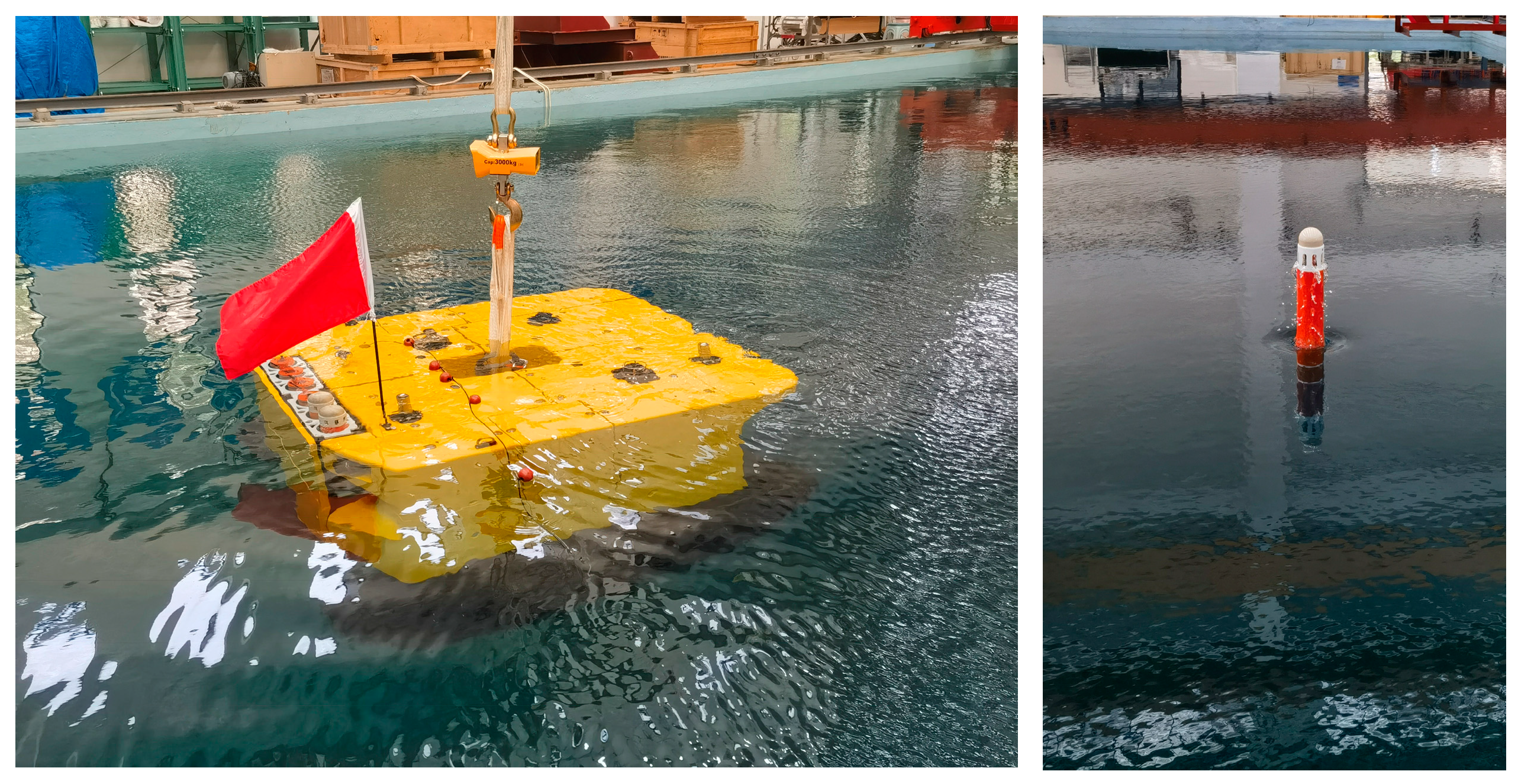
3.2. Simulation Results and Pool Test
4. Discussion
5. Conclusions
- (1)
- The design of PDCBs can be accomplished using the theoretical calculation method to meet the communication requirements. The comparison of the hydrodynamic simulation and pool test, the maximum roll angle error calculated theoretically is less than 5%, and the roll period is similar (~2.5 s). By using the theoretical calculation method, the roll motion can be predicted, and resonance between the floating body and the wave can be avoided during the design process.
- (2)
- We reduced the difficulty of processing nonlinear terms. We introduced the Morrison theoretical formula in the differential equation of roll motion and analyzed the inertia force and drag force by using the KC number. The Morrison theoretical formula fully considers the characteristics of the floating slender cylinder. In contrast, the processing of the nonlinear term by using the Linz Ted Poincaré method can appropriately omit the higher harmonics according to the accuracy requirements, simplifying the equation of roll motion. The processing method of the differential equation of roll motion proposed in this paper has guiding significance for the structural design, motion prediction, improvement, and optimization of small buoys.
- (3)
- We presented a clear expression for calculating the additional inertia for small buoys, which facilitates the calculation of roll motion. Traditional methods of calculating the additional inertia are often based on ship types or large buoys and are difficult to apply directly to small buoys. The additional inertia obtained using the Morrison theoretical formula fully considers the characteristics of slender cylindrical small floats; thus, it is highly suitable for PDCBs and has guiding significance for the structural design of other types of small floats.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PDCB | The Popup Data Communication Beacon |
| DSLV | Deep-Sea Landing Vehicle |
| AUV | Autonomous Underwater Vehicle |
| BDS | BeiDou navigation satellite System |
| VOF | Volume of Fluid |
| CFD | Computational Fluid Dynamics) |
References
- Weller, R.A.; Baker, D.J.; Glackin, M.M.; Roberts, S.J.; Schmitt, R.W.; Twigg, E.S.; Vimont, D.J. The Challenge of Sustaining Ocean Observations. Front. Mar. Sci. 2019, 6, 105. [Google Scholar] [CrossRef]
- Venkatesan, R.; Tandon, A.; Sengupta, D.; Navaneeth, K. Recent Trends in Ocean Observations. In Observing the Oceans in Real Time; Springer: Cham, Switzerland, 2018; pp. 3–13. [Google Scholar]
- Matsuda, T.; Takizawa, R.; Sakamaki, T.; Maki, T. Landing method of autonomous underwater vehicles for seafloor surveying. Appl. Ocean Res. 2020, 101, 102221. [Google Scholar] [CrossRef]
- Griffiths, G. Technology and Applications of Autonomous Underwater Vehicles; CRC Press: Boca Raton, FL, USA, 2002; Volume 2. [Google Scholar]
- Sun, H.; Guo, W.; Lan, Y.; Wei, Z.; Gao, S.; Sun, Y.; Fu, Y. Black-Box Modelling and Prediction of Deep-Sea Landing Vehicles Based on Optimised Support Vector Regression. J. Mar. Sci. Eng. 2022, 10, 575. [Google Scholar] [CrossRef]
- Garzoli, S.; Boebel, O.; Bryden, H.; Fine, R.A.; Fukasawa, M.; Gladyshev, S.; Johnson, G.; Johnson, M.; MacDonald, A.; Meinen, C. Progressing towards global sustained deep ocean observations. In Proceedings of the OceanObs’09, Venice-Lido, Italy, 21–25 September 2009. [Google Scholar]
- Karstensen, J.; Motz, M.; Hansen, B.; Larsen, K.; Rayner, D. Technical Enhancement of TMA Sites for Data Safety & Cost Efficiency; AtlantOS: Kiel, Germany, 2018. [Google Scholar]
- Liu, Q.; Chen, Y. Research on sea surface drifting buoy based on Beidou communication System. In Proceedings of the 2017 5th International Conference on Frontiers of Manufacturing Science and Measuring Technology (FMSMT 2017), Taiyuan, China, 24–25 June 2017; pp. 1300–1304. [Google Scholar]
- Luo, P.; Song, Y.; Xu, X.; Wang, C.; Zhang, S.; Shu, Y.; Ma, Y.; Shen, C.; Tian, C. Efficient Underwater Sensor Data Recovery Method for Real-Time Communication Subsurface Mooring System. J. Mar. Sci. Eng. 2022, 10, 1491. [Google Scholar] [CrossRef]
- Halverson, M.; Jackson, J.; Richards, C.; Melling, H.; Brunsting, R.; Dempsey, M.; Gatien, G.; Hamilton, A.; Hunt, B.; Jacob, W. Guidelines for Processing RBR CTD Profiles; Fisheries and Oceans Canada= Pêches et océans Canada: Ottawa, ON, Canada, 2017. [Google Scholar]
- Sugimura, D.; Arai, M.; Sakaguchi, K.; Araki, K.; Sotoyama, T. A study on beam tilt angle of base station antennas for base station cooperation systems. In Proceedings of the 2011 IEEE 22nd International Symposium on Personal, Indoor and Mobile Radio Communications, Toronto, ON, Canada, 11–14 September 2011; pp. 2374–2378. [Google Scholar]
- Ling, C.; Yin, X.; He, Y.; Ruiz Boqué, S. Attitude Estimation for In-Service Base Station Antenna Using Downlink Channel Fading Statistics. Int. J. Antennas Propag. 2015, 2015, 898631. [Google Scholar] [CrossRef] [Green Version]
- Xia, X.; Zhang, H.; Lu, T.; Gulliver, T.A. Design of a beidou satellite radome for deep-sea buoys. In Proceedings of the 2017 IEEE Pacific Rim Conference on Communications, Computers and Signal Processing (PACRIM), Victoria, BC, Canada, 21–23 August 2017; pp. 1–5. [Google Scholar]
- Zan, X.; Lin, Z.; Gou, Y. The Force Exerted by Surface Wave on Cylinder and Its Parameterization: Morison Equation Revisited. J. Mar. Sci. Eng. 2022, 10, 702. [Google Scholar] [CrossRef]
- Tsuji, Y.; Nagata, Y. Stokes’ expansion of internal deep water waves to the fifth order. J. Oceanogr. Soc. Jpn. 1973, 29, 61–69. [Google Scholar] [CrossRef]
- Fenton, J.D. A fifth-order Stokes theory for steady waves. J. Waterw. Port Coast. Ocean Eng. 1985, 111, 216–234. [Google Scholar] [CrossRef] [Green Version]
- Karambas, T.V.; Koutitas, C.G. An improvement to Stokes nonlinear theory for steady waves. J. Waterw. Port Coast. Ocean Eng. 1998, 124, 36–39. [Google Scholar] [CrossRef]
- Chen, L.F.; Zang, J.; Hillis, A.J.; Morgan, G.C.J.; Plummer, A.R. Numerical investigation of wave–structure interaction using OpenFOAM. Ocean Eng. 2014, 88, 91–109. [Google Scholar] [CrossRef] [Green Version]
- Zank, G.P.; Matthaeus, W.H. The equations of nearly incompressible fluids. I. Hydrodynamics, turbulence, and waves. Phys. Fluids A Fluid Dyn. 1991, 3, 69–82. [Google Scholar] [CrossRef]
- Ursell, F.; Dean, R.G.; Yu, Y.S. Forced small-amplitude water waves: A comparison of theory and experiment. J. Fluid Mech. 2006, 7, 33–52. [Google Scholar] [CrossRef]
- Choun, Y.-S.; Yun, C.-B. Sloshing analysis of rectangular tanks with a submerged structure by using small-amplitude water wave theory. Earthq. Eng. Struct. Dyn. 1999, 28, 763–783. [Google Scholar] [CrossRef]
- Pierson, W.J. Practical Methods for Observing and Forecasting Ocean Waves by Means of Wave Spectra and Statistics; Hydrographic Office: Washington, DC, USA, 1958. [Google Scholar]
- Paidoussis, M.P. Flow-induced Instabilities of Cylindrical Structures. Appl. Mech. Rev. 1987, 40, 163–175. [Google Scholar] [CrossRef]
- Merchant, H.; Kelf, M. Nonlinear analysis of submerged ocean buoy systems. In Proceedings of the Ocean 73-IEEE International Conference on Engineering in the Ocean Environment, Seattle, WA, USA, 25–28 September 1973; pp. 390–395. [Google Scholar]
- Verhulst, F.; Verhulst, F. The Poincaré-Lindstedt method. In Nonlinear Differential Equations and Dynamical Systems; Springer: Berlin/Heidelberg, Germany, 1996; pp. 122–135. [Google Scholar]
- Nedjadi, Y.; Barrett, R. The Duffin-Kemmer-Petiau oscillator. J. Phys. A Math. Gen. 1994, 27, 4301. [Google Scholar] [CrossRef] [Green Version]
- Morison, J.; Johnson, J.W.; Schaaf, S.A. The force exerted by surface waves on piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Sumer, B.M. Hydrodynamics around Cylindrical Strucures; World Scientific: Singapore, 2006; Volume 26. [Google Scholar]
- Cotter, D.C.; Chakrabarti, S.K. Wave force tests on vertical and inclined cylinders. J. Waterw. Port Coast. Ocean Eng. 1984, 110, 1–14. [Google Scholar] [CrossRef]
- Keulegan, G.H.; Carpenter, L.H. Forces on Cylinders and Plates in an Oscillating Fluid; U.S. Department of Commerce National Bureau of Standards: Washington, DC, USA, 1956. [Google Scholar]
- Lu, Y.; Shao, W.; Gu, Z.; Wu, C.; Li, C. Research on ship motion characteristics in a cross sea based on computational fluid dynamics and potential flow theory. Eng. Appl. Comput. Fluid Mech. 2023, 17, 2164618. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beaufort Scale | Wind Velocity (m/s) | (m) | (m) | The Period of the Wave (s) | Wavelength (m) | ||
|---|---|---|---|---|---|---|---|
| Range | Average | Range | Average | ||||
| 0 | 0~0.2 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0.3~1.5 | 0.015 | 0.02 | 0~1.0 | 0.5 | 0~0.9 | 0.10 |
| 2 | 1.6~3.3 | 0.055 | 0.09 | 0.4~2.8 | 1.4 | 0.7~25 | 2.00 |
| 3 | 3.4~5.4 | 0.183 | 0.30 | 0.8~4.9 | 2.4 | 2~60 | 6.00 |
| 4 | 5.5~7.9 | 0.549 | 0.88 | 1.6~7.6 | 3.9 | 8~116 | 16.00 |
| 5 | 8.0~10.7 | 1.311 | 2.10 | 2.8~10.6 | 5.4 | 15~193 | 31.00 |
| 6 | 10.8~13.8 | 2.500 | 4.00 | 3.8~13.6 | 7.0 | 24~300 | 50.00 |
| 7 | 13.9~17.1 | 4.450 | 7.00 | 4.8~17.0 | 8.7 | 37~440 | 78.00 |
| 8 | 17.2~20.7 | 7.010 | 11.30 | 6.0~20.5 | 10.5 | 51~610 | 115.00 |
| KC Number. | Dominance Analysis |
|---|---|
| KC < 3 | The inertia force accounts for the main component. |
| 3 < KC < 15 | Inertia force + linearized drag force. |
| 15 < KC < 45 | Inertia force + complete nonlinear drag force. |
| KC > 45 | The drag force accounts for the main component. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Chi, H.; Yu, L.; Wang, C.; Tian, C. Theoretical Analysis Method for Roll Motion of Popup Data Communication Beacons. J. Mar. Sci. Eng. 2023, 11, 1193. https://doi.org/10.3390/jmse11061193
Song Y, Chi H, Yu L, Wang C, Tian C. Theoretical Analysis Method for Roll Motion of Popup Data Communication Beacons. Journal of Marine Science and Engineering. 2023; 11(6):1193. https://doi.org/10.3390/jmse11061193
Chicago/Turabian StyleSong, Yuanjie, Haoyuan Chi, Liang Yu, Chen Wang, and Chuan Tian. 2023. "Theoretical Analysis Method for Roll Motion of Popup Data Communication Beacons" Journal of Marine Science and Engineering 11, no. 6: 1193. https://doi.org/10.3390/jmse11061193