
A Review of Subsea AUV Technology

Abstract
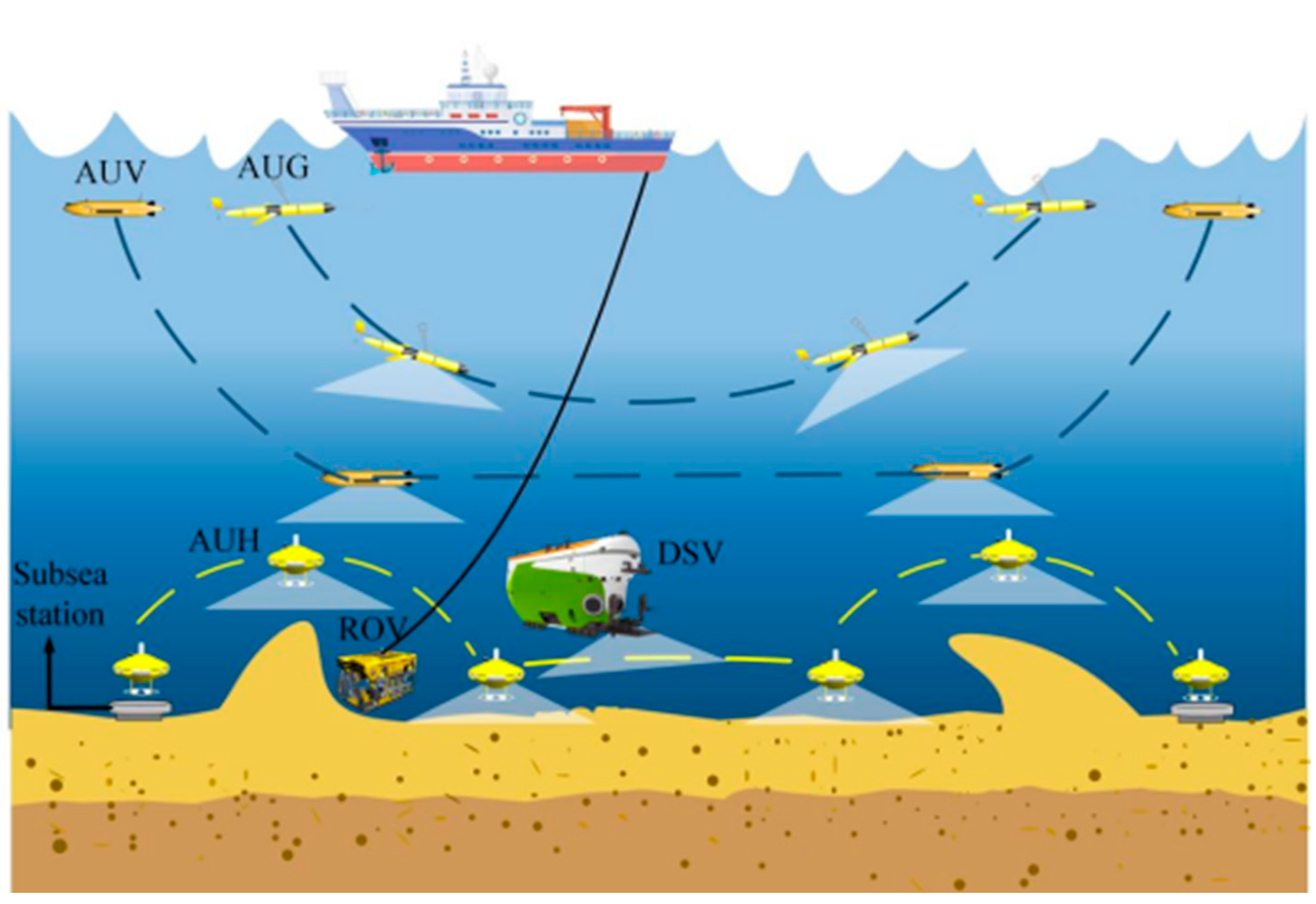
:1. Overview
2. The Mobility and Agility of Subsea AUV
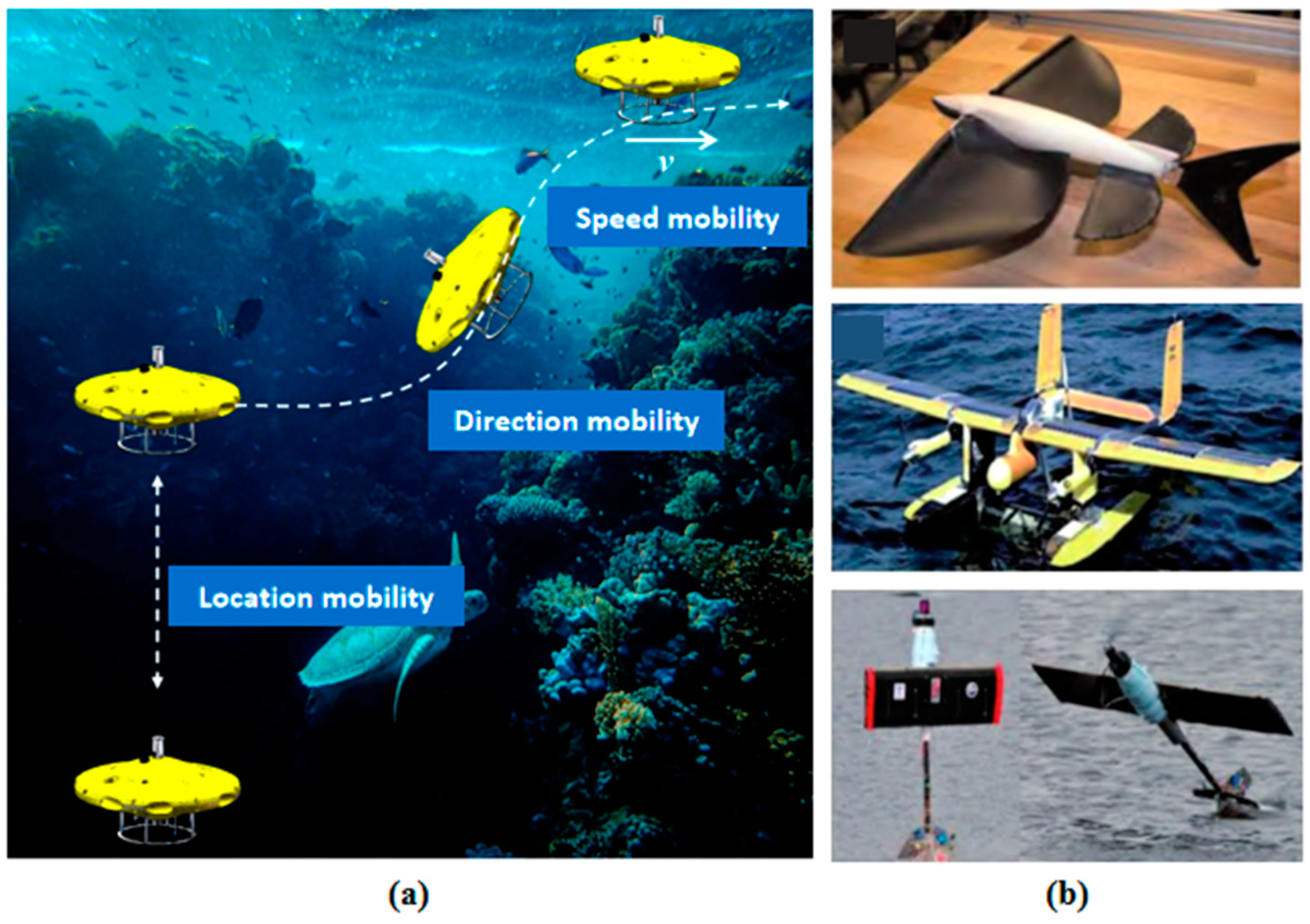
- (1)
- Speed mobility: On the one hand, this refers to faster and more stable seabed navigation capabilities, and on the other hand, it refers to the ability to work at extremely low speeds (including hovering, i.e., zero speed).
- (2)
- Direction mobility: This refers to the ability to turn and change pitch, yaw, and roll in three degrees of freedom, i.e., attitude control. Mobile submersibles need to have both instantaneous angular velocity and large-angle stability. Due to the need to quickly adapt to the complexity of seabed topography, direction mobility is particularly important for subsea AUVs.
- (3)
- Location mobility: This part is less considered during submersible design. It refers to the ability of the vehicle to move through different environments—air, land, water surface, water body, and seabed. For example, an amphibious aircraft needs to have the ability to fly in the air and dive underwater. For subsea AUVs, it is mainly about having stable operation capabilities, from landing on water bodies, diving to the seabed, and taking off from the seabed.
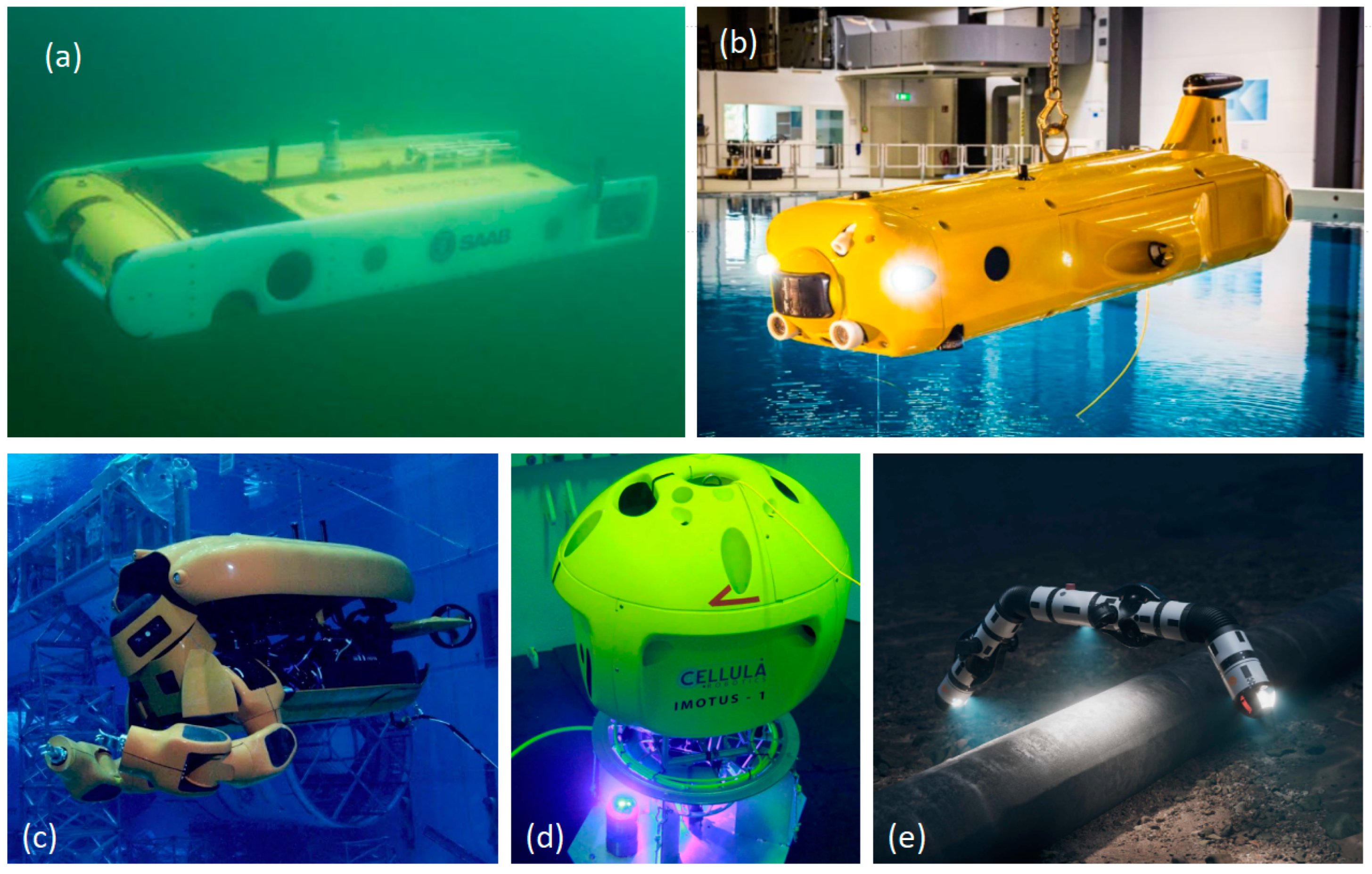
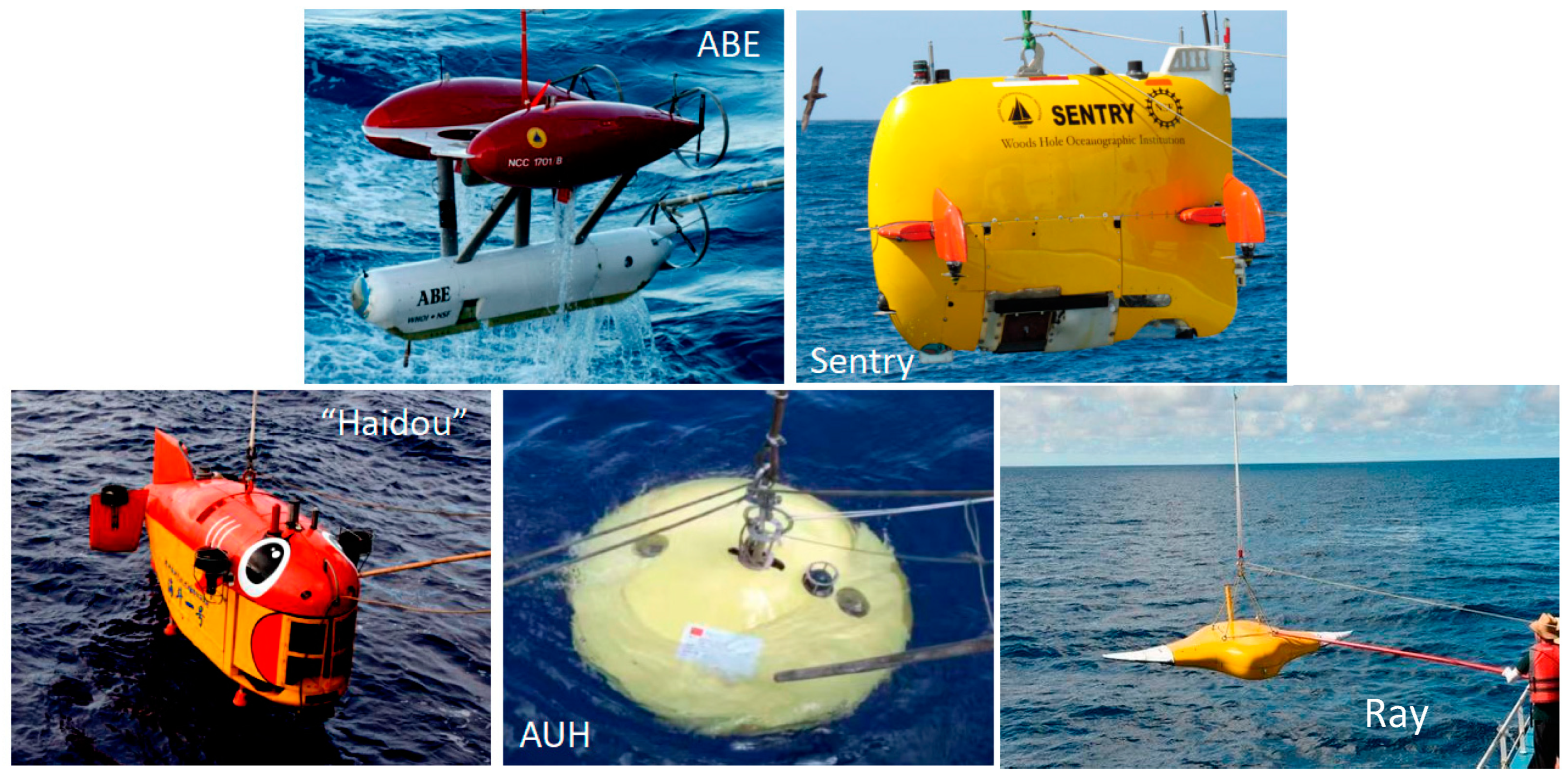
3. Evolution of the Subsea AUV Body Structure
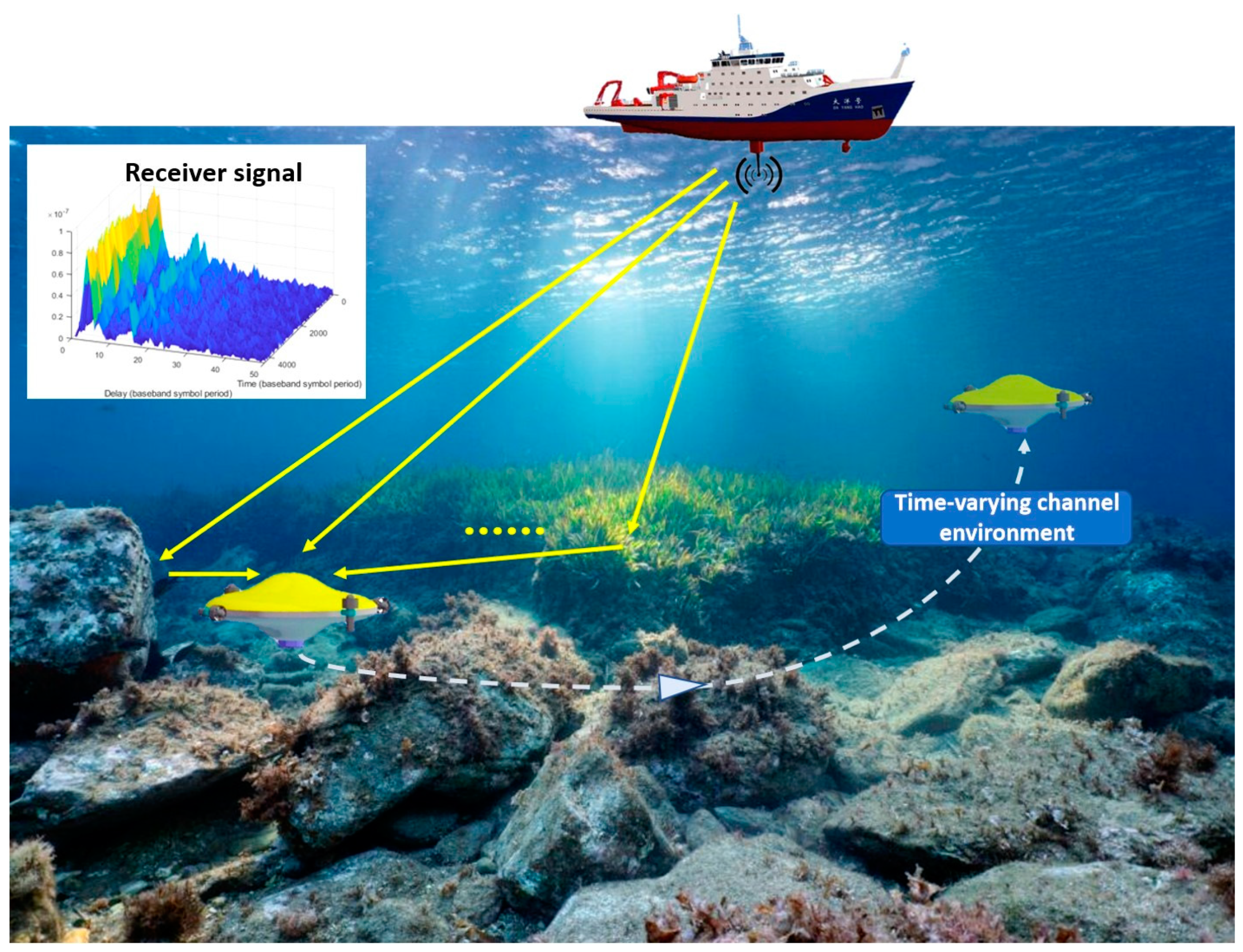
4. Seabed Acoustic Communication and Positioning Navigation Technology
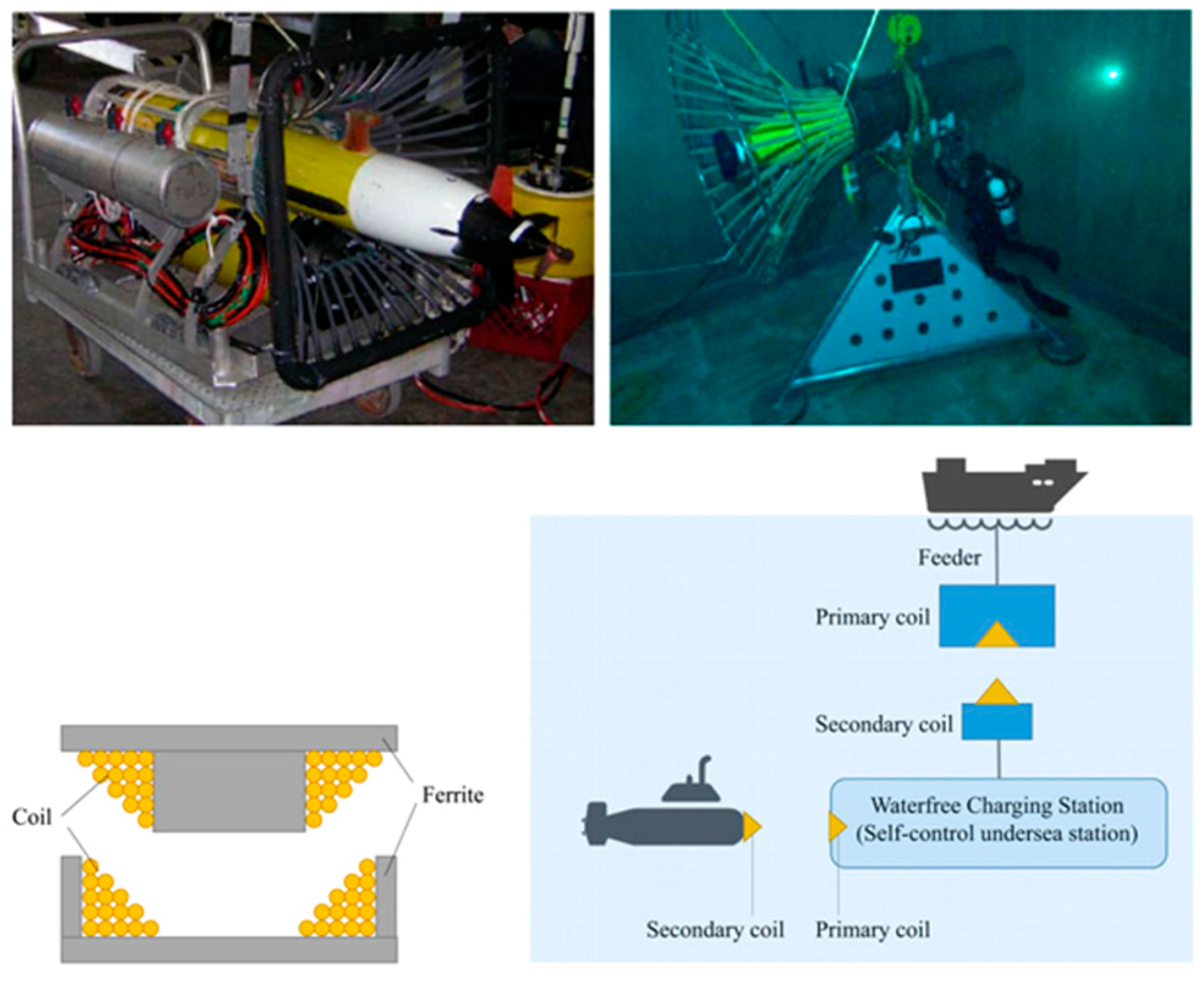
5. Wireless Power/Data Transmission Technology
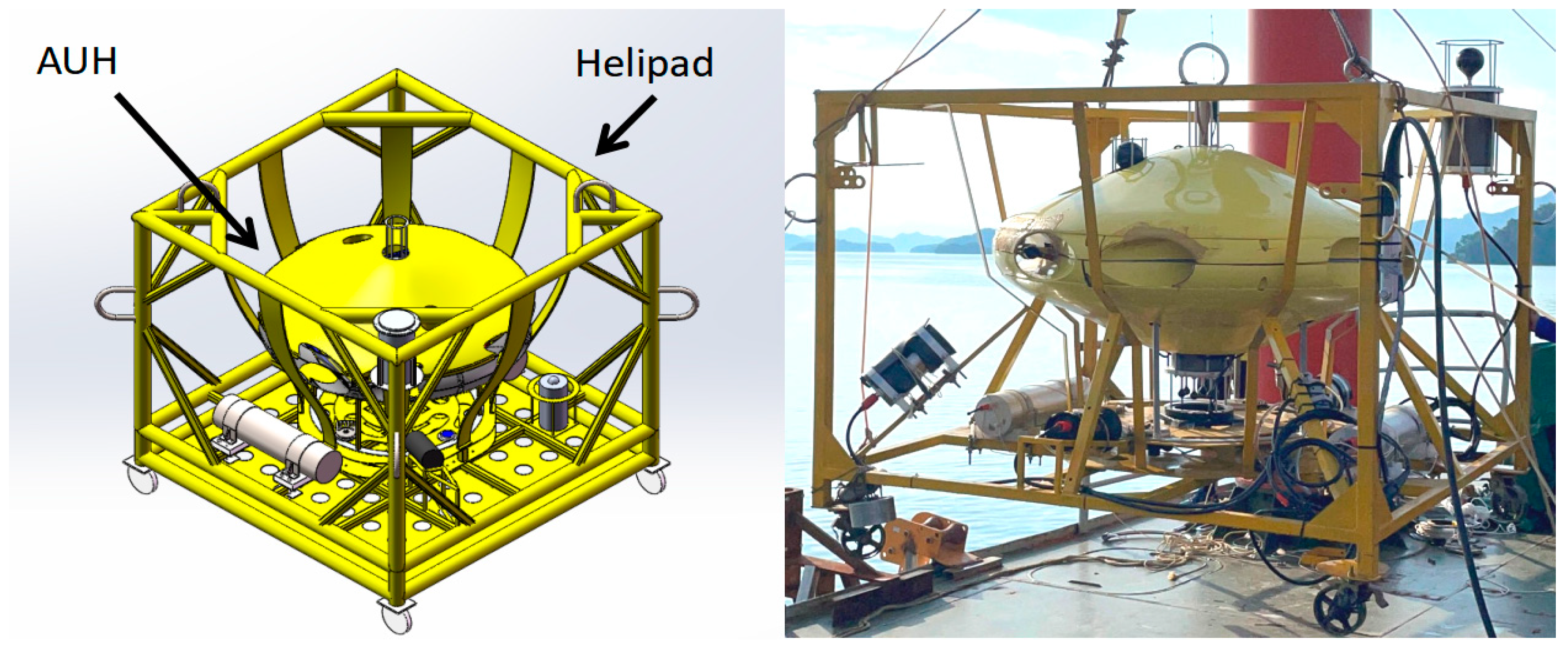
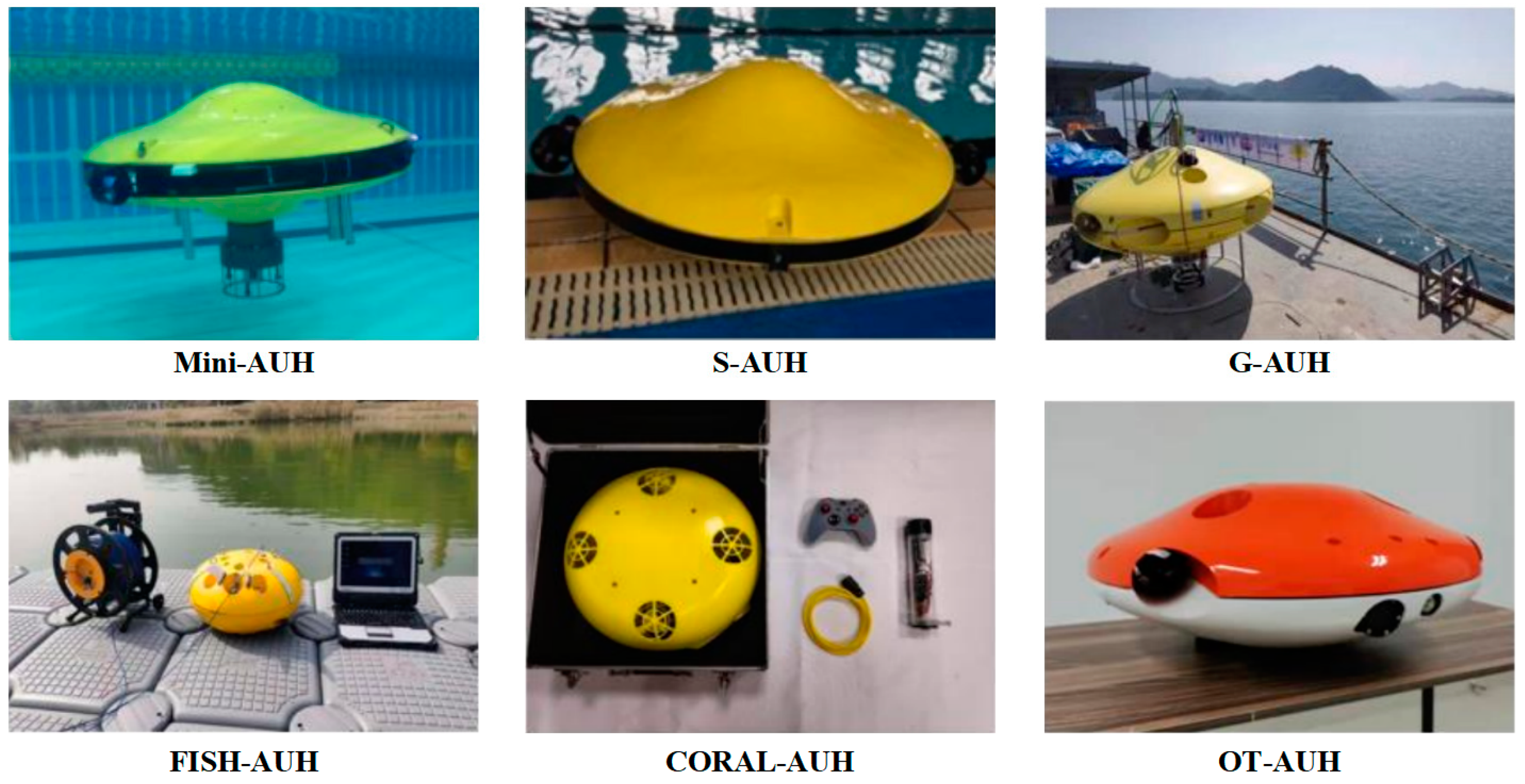
6. A Practical Example of Subsea AUV: Autonomous Underwater Helicopter
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, Y.; Yang, C.; Tao, C. Seabed Observation System; Ocean Press: Beijing, China, 2006. (In Chinese) [Google Scholar]
- Doya, C.; Chatzievangelou, D.; Bahamon, N.; Purser, A.; De Leo, F.C.; Juniper, S.K.; Thomsen, L.; Aguzzi, J. Seasonal monitoring of deep-sea megabenthos in Barkley Canyon cold seep by internet operated vehicle (IOV). PLoS ONE 2017, 12, e0176917. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar]
- Yoshida, H.; Aoki, T.; Osawa, H.; Ishibashi, S.; Watanabe, Y.; Tahara, J.; Miyazaki, T.; Itoh, K. A deepest depth ROV for sediment sampling and its sea trial result. In Proceedings of the Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 17–20 April 2007; pp. 28–33. [Google Scholar]
- Katzschmann, R.; Marchese, A.; Rus, D. Hydraulic autonomous soft robotic fish for 3D swimming. In Proceedings of the Experimental Robotics: The 14th International Symposium on Experimental Robotics, Marrakech and Essaouira, Morocco, 15–18 June 2015; pp. 405–420. [Google Scholar]
- Marchese, A.; Onal, C.; Rus, D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators. Soft Robot. 2014, 1, 75–87. [Google Scholar]
- Marras, S.; Porfiri, M. Fish and robots swimming together: Attraction towards the robot demands biomimetic locomotion. J. R. Soc. Interface 2012, 9, 1856–1868. [Google Scholar] [CrossRef]
- Cloitre, A.; Arensen, B.; Patrikalakis, N.; Youcef-Toumi, K.; Alvarado, P.V.Y. Propulsive performance of an underwater soft biomimetic batoid robot. In Proceedings of the Twenty-Fourth International Ocean and Polar Engineering Conference, Busan, Korea, 15–20 June 2014; Volume 19, pp. 1712–1717. [Google Scholar]
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y.; et al. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045. [Google Scholar] [CrossRef]
- Suzumori, K.; Endo, S.; Kanda, T.; Kato, N.; Suzuki, H. A bending pneumatic rubber actuator realizing soft-bodied manta swimming robot. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 4975–4980. [Google Scholar]
- Calisti, M.; Giorelli, M.; Levy, G.; Mazzolai, B.; Hochner, B.; Laschi, C.; Dario, P. An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspir. Biomim. 2011, 6, 036002. [Google Scholar] [CrossRef]
- Purser, A.; Thomsen, L.; Barnes, C.; Best, M.; Chapman, R.; Hofbauer, M.; Menzel, M.; Wagner, H. Temporal and spatial benthic data collection via an internet operated Deep Sea Crawler. Methods Oceanogr. 2013, 5, 1–18. [Google Scholar] [CrossRef]
- Picardi, G.; Chellapurath, M.; Iacoponi, S.; Stefanni, S.; Laschi, C.; Calisti, M. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 2020, 5, eaaz1012. [Google Scholar] [CrossRef]
- Song, Z.; Marburg, A.; Manalang, D. Resident Subsea Robotic Systems: A Review. Mar. Technol. Soc. J. 2020, 54, 21–31. [Google Scholar] [CrossRef]
- Singh, H.; Can, A.; Eustice, R.; Lerner, S.; McPhee, N.; Roman, C. Seabed AUV offers new platform for High-Resolution Imaging. EOS 2004, 85, 292–295. [Google Scholar] [CrossRef]
- Albiez, J.; Joyeux, S.; Gaudig, C.; Hilljegerdes, J.; Kroffke, S.; School, C.; Arnold, S.; Mimoso, G.; Alcantara, P.; Saback, R.; et al. FlatFish—A compact subsea-resident inspection AUV. In Proceedings of the OCEANS 2015, Washington, DC, USA, 19–22 October 2015; p. 7404442. [Google Scholar]
- Borlaug, I.; Pettersen, K.; Gravdahl, J. Combined kinematic and dynamic control of vehicle-manipulator systems. Mechatronics 2020, 69, 102380. [Google Scholar] [CrossRef]
- Johansson, B.; Siesjö, J.; Furuholmen, M. Seaeye sabertooth a hybrid auv/rov offshore system. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; IEEE: New York, NY, USA, 2010; pp. 1–3. [Google Scholar]
- Manalang, D.; Delaney, J.; Marburg, A.; Nawaz, A. Resident auv workshop 2018: Applications and a path forward. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; IEEE: New York, NY, USA, 2018; pp. 1–6. [Google Scholar]
- Manley, J.E.; Halpin, S.; Radford, N.; Ondler, M. Aquanaut: A new tool for subsea inspection and intervention. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; IEEE: New York, NY, USA, 2018; pp. 1–4. [Google Scholar]
- Soylu, S.; Hampton, P.; Crees, T.; Woodroffe, A.; Jackson, E. Sonar-based slam navigation in flooded confined spaces with the imotus-1 hovering auv. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; IEEE: New York, NY, USA, 2018; pp. 1–6. [Google Scholar]
- Kelasidi, E.; Moe, S.; Pettersen, K.Y.; Kohl, A.M.; Liljebäck, P.; Gravdahl, J.T. Path following, obstacle detection and obstacle avoidance for thrusted underwater snake robots. Front. Robot. AI 2019, 6, 57. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, P. Study on the propulsion vector on agility of aircraft. In Proceedings of the 13th Annual Conference on China System Simulation Technology and Application, Huangshan, China, 3 August 2011. (In Chinese). [Google Scholar]
- Wang, B. Study on Control Principle Based on Flying Quality and Agility. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2009. (In Chinese). [Google Scholar]
- Kumar, V.; Rajagopal, P. Optimising the turning performance of serial split-hull underwater vehicles. Ocean Eng. 2022, 261, 112099. [Google Scholar] [CrossRef]
- Gao, D.; Wang, T.; Qin, F.; Zhang, S.; Jing, J.; Yang, J. Design, fabrication, and testing of a maneuverable underwater vehicle with a hybrid propulsor. Biomim. Intell. Robot. 2022, 2, 100072. [Google Scholar] [CrossRef]
- Low, K.; Willy, A. Biomimetic motion planning of an undulating robotic fish fin. J. Vib. Control 2006, 12, 1337–1359. [Google Scholar] [CrossRef]
- Hu, T.; Wang, G.; Shen, L.; Li, F. A novel conceptual fish-like robot inspired by Rhinecanthus aculeatus. In Proceedings of the 9th International Conference on Control, Automation, Robotics and Vision, Singapore, 5–8 December 2006; pp. 1–5. [Google Scholar]
- Bettle, M.; Gerber, A.; Watt, G. Unsteady analysis of the six DOF motion of a buoyantly rising submarine. Comput. Fluids 2009, 38, 1833–1849. [Google Scholar] [CrossRef]
- Phillips, A.; Furlong, M.; Turnock, S. The use of computational fluid dynamics to assess the hull resistance of concept autonomous underwater vehicles. In Proceedings of the Oceans 2007, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Phillips, A.; Turnock, S.; Furlong, M. The use of computational fluid dynamics to aid cost-effective hydrodynamic design of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2010, 224, 239–254. [Google Scholar] [CrossRef]
- Li, Y.; Hu, J.; Zhao, Q.; Pan, Z.; Ma, Z. Hydrodynamic performance of autonomous underwater gliders with active twin undulatory wings of different aspect ratios. J. Mar. Sci. Eng. 2020, 8, 476. [Google Scholar] [CrossRef]
- Li, Y.; Pan, D.; Zhao, Q.; Ma, Z.; Wang, X. Hydrodynamic performance of an autonomous underwater glider with a pair of bioinspired hydro wings—A numerical investigation. Ocean Eng. 2018, 163, 51–57. [Google Scholar] [CrossRef]
- Sun, T.; Chen, G.; Yang, S.; Wang, Y.; Wang, Y.; Tan, H.; Zhang, L. Design and optimization of a bio-inspired hull shape for AUV by surrogate model technology. Eng. Appl. Comput. Fluid Mech. 2021, 15, 1057–1074. [Google Scholar] [CrossRef]
- Honaryar, A.; Ghiasi, M. Design of a bio-inspired hull shape for an AUV from hydrodynamic stability point of view through experiment and numerical analysis. J. Bionic Eng. 2018, 15, 950–959. [Google Scholar] [CrossRef]
- Alvarez, A.; Bertram, V.; Gualdesi, L. Hull hydrodynamic optimization of autonomous underwater vehicles operating at snorkeling depth. Ocean Eng. 2009, 36, 105–112. [Google Scholar] [CrossRef]
- Divsalar, K. Improving the hydrodynamic performance of the SUBOFF bare hull model: A CFD approach. Acta Mech. Sin. 2020, 36, 44–56. [Google Scholar]
- Du, X.; Wang, H.; Hao, C.; Li, X.L. Analysis of hydrodynamic characteristics of unmanned underwater vehicle moving close to the sea bottom. Def. Technol. 2014, 10, 76–81. [Google Scholar] [CrossRef]
- Salari, M.; Rava, A. Numerical investigation of hydrodynamic flow over an AUV moving in the water-surface vicinity considering the laminar-turbulent transition. J. Mar. Sci. Appl. 2017, 16, 298–304. [Google Scholar] [CrossRef]
- Wu, L.; Li, Y.; Su, S.; Yan, P.; Qin, Y. Hydrodynamic analysis of AUV underwater docking with a cone-shaped dock under ocean currents. Ocean Eng. 2014, 85, 110–126. [Google Scholar] [CrossRef]
- Wang, X.; Shi, Y.; Pan, G.; Chen, X.; Zhao, H. Numerical research on the high-speed water entry trajectories of AUVs with asymmetric nose shapes. Ocean Eng. 2021, 234, 109274. [Google Scholar] [CrossRef]
- da Silva Costa, G.; Ruiz, A.; Reis, M.; da Cunha Lima, A.T.; de Almeida, M.P.; da Cunha Lima, I.C. Numerical analysis of stability and maneuverability of Autonomous Underwater Vehicles (AUV) with fishtail shape. Ocean Eng. 2017, 144, 320–326. [Google Scholar]
- Pontbriand, C.; Farr, N.; Hansen, J.; Kinsey, J.C.; Pelletier, L.P.; Ware, J.; Fourie, D. Wireless data harvesting using the AUV Sentry and WHOI optical modem. In Proceedings of the OCEANS 2015—MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Cong, Y.; Gu, C.; Zhang, T.; Gao, Y. Underwater robot sensing technology: A survey. Fundam. Res. 2021, 1, 337–345. [Google Scholar] [CrossRef]
- German, C.R.; Yoerger, D.R.; Jakuba, M.; Shank, T.; Lin, J.; Nakamura, K. Hydrothermal exploration by AUV: Progress to-date with ABE in the Pacific, Atlantic & Indian Oceans. In Proceedings of the 2008 IEEE/OES Autonomous Underwater Vehicles, Woods Hole, MA, USA, 13–14 October 2008; IEEE: New York, NY, USA, 2008; pp. 1–5. [Google Scholar]
- Chen, C.W.; Jiang, Y.; Huang, H.C.; Ji, D.X.; Sun, G.Q.; Yu, Z.; Chen, Y. Computational fluid dynamics study of the motion stability of an autonomous underwater helicopter. Ocean Eng. 2017, 143, 227–239. [Google Scholar] [CrossRef]
- Chao, L.-M.; Pan, G.; Zhang, D.; Yan, G.-X. On the thrust generation and wake structures of two travelling-wavy foils. Ocean Eng. 2019, 183, 167–174. [Google Scholar] [CrossRef]
- Lin, Y.; Huang, Y.; Zhu, H.; Huang, H.; Chen, Y. Simulation study on the hydrodynamic resistance and stability of a disk-shaped autonomous underwater helicopter. Ocean Eng. 2021, 219, 108385. [Google Scholar] [CrossRef]
- An, X.; Chen, Y.; Huang, H. Parametric design and optimization of the profile of autonomous underwater helicopter based on NURBS. J. Mar. Sci. Eng. 2021, 9, 668. [Google Scholar] [CrossRef]
- Chen, C.; Chen, Y.; Cai, Q. Hydrodynamic-interaction analysis of an autonomous underwater hovering vehicle and ship with wave effects. Symmetry 2019, 11, 1213. [Google Scholar] [CrossRef]
- Guo, J.; Lin, Y.; Lin, P.; Li, H.; Huang, H.; Chen, Y. Study on hydrodynamic characteristics of the disk-shaped autonomous underwater helicopter over sea-beds. Ocean Eng. 2022, 266, 113132. [Google Scholar] [CrossRef]
- Güneş, A. Performance comparison of target tracking filters in underwater multipath environments. In Proceedings of the 29th Signal Processing and Communications Applications Conference (SIU), Istanbul, Turkey, 9–11 June 2021; pp. 1–4. [Google Scholar]
- Song, H.; Yang, C. Anti-multipath near-field localization in multi-path underwater acoustic channel. In Proceedings of the IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), Penghu, Taiwan, 15–17 September 2021; pp. 1–2. [Google Scholar]
- Lohrasbipeydeh, H.; Mosayyebpour, S.; Gulliver, T. Single hydrophone passive acoustic sperm whale range and depth estimation. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 754–757. [Google Scholar]
- Sun, H.; Chen, Z.; Long, X. Single Hydrophone Passive Location Based on Multipath Time Delay Estimation. Mine Warf. Ship Prot. 2016, 24, 11–13. (In Chinese) [Google Scholar]
- Dos Santos, M.; De Giacomo, G.; Drews, P.; Botelho, S.S. Matching color aerial images and underwater sonar images using deep learning for underwater localization. IEEE Robot. Autom. Lett. 2020, 5, 6365–6370. [Google Scholar] [CrossRef]
- Zhang, J.; Cao, Y.; Han, G.; Fu, X. Deep neural network-based underwater OFDM receiver. IET Commun. 2019, 13, 1998–2002. [Google Scholar] [CrossRef]
- Lee-Leon, A.; Yuen, C.; Herremans, D. Underwater acoustic communication receiver using deep belief network. IEEE Trans. Commun. 2021, 69, 3698–3708. [Google Scholar] [CrossRef]
- Rauchenstein, L.T.; Vishnu, A.; Li, X.; Deng, Z.D. Improving underwater localization accuracy with machine learning. Rev. Sci. Instrum. 2018, 89, 074902. [Google Scholar] [CrossRef]
- Yan, J.; Meng, Y.; Yang, X.; Luo, X.; Guan, X. Privacy-preserving localization for underwater sensor networks via deep reinforcement learning. IEEE Trans. Inf. Forensics Secur. 2020, 16, 1880–1895. [Google Scholar] [CrossRef]
- Gish, L.A. Design of an AUV Recharging System. 2004. Available online: https://dspace.mit.edu/handle/1721.1/33445 (accessed on 1 April 2023).
- Miller, B.D. Design of an AUV Recharging System. 2005. Available online: https://dspace.mit.edu/bitstream/handle/1721.1/33561/63280149-MIT.pdf?sequence=2&isAllowed=y (accessed on 1 April 2023).
- Ewachiw, M.A.J. Design of an Autonomous Underwater Vehicle (AUV) Charging System for Underway, Underwater Recharging. 2014. Available online: https://dspace.mit.edu/handle/1721.1/92102 (accessed on 1 April 2023).
- Allen, B.; Austin, T.; Forrester, N.; Goldborough, R.; Stokey, R. Autonomous docking demonstrations with enhanced REMUS technology. In Proceedings of the IEEE Oceanic Engineering Society, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar]
- Kawasaki, T.; Fukasawa, T.; Noguchi, T.; Baino, M. Development of AUV marine bird with underwater docking and recharging system. In Proceedings of the International Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 25–27 June 2003; pp. 166–170. [Google Scholar]
- Kawasaki, T.; Noguchi, T.; Fukasawa, T.; Baino, M. “Marine bird”, a new experimental AUV-results of docking and electric power supply tests in sea trials. In Proceedings of the IEEE Oceanic Engineering Society 3, Kobe, Japan, 9–12 November 2004; pp. 1738–1744. [Google Scholar]
- Kojiya, T.; Sato, F.; Matsuki, H.; Sato, T. Automatic power supply system to underwater vehicles utilizing non-contacting technology. In Proceedings of the OCEANS ‘04. MTTS/IEEE TECHNO-OCEAN ’04, Kobe, Japan, 9–12 November 2004; Volume 4, pp. 2341–2345. [Google Scholar]
- Cai, C.; Rong, Z.; Chen, Z.; Xu, B.; Wang, Z.; Hu, S.; Wang, Y.; Dong, M.; Quan, X.; Si, Y.; et al. A resident subsea docking system with a real-time communication buoy moored by an electro-optical-mechanical cable. Ocean Eng. 2023, 271, 113729. [Google Scholar] [CrossRef]
- Chen, C.-W.; Lu, Y.-F. Computational fluid dynamics study of water entry impact forces of an airborne-launched, axisymmetric, disk-type Autonomous underwater hovering vehicle. Symmetry 2019, 11, 1100. [Google Scholar] [CrossRef]
- Lin, Y.; Guo, J.; Li, H.; Wang, Z.; Chen, Y.; Huang, H. Improvement of hydrodynamic performance of the disk-shaped autonomous underwater helicopter by local shape modification. Ocean Eng. 2022, 260, 112056. [Google Scholar] [CrossRef]
- Shi, K.; Wang, X.; Xu, H.; Guo, C.; Chen, H. Model-free Parameter Adaptive Sliding Mode Control for Underwater Helicopter. Ship Sci. Technol. 2022, 44, 73–79. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Si, Y.; Chen, Y. A Review of Subsea AUV Technology. J. Mar. Sci. Eng. 2023, 11, 1119. https://doi.org/10.3390/jmse11061119
Zhou J, Si Y, Chen Y. A Review of Subsea AUV Technology. Journal of Marine Science and Engineering. 2023; 11(6):1119. https://doi.org/10.3390/jmse11061119
Chicago/Turabian StyleZhou, Jing, Yulin Si, and Ying Chen. 2023. "A Review of Subsea AUV Technology" Journal of Marine Science and Engineering 11, no. 6: 1119. https://doi.org/10.3390/jmse11061119