
Hydrokinetic Power Potential in Spanish Coasts Using a Novel Turbine Design

Abstract
:1. Introduction
2. Methodology
2.1. Overview
2.2. Reynolds-Averaged Navier-Stokes Equation (RANSE)
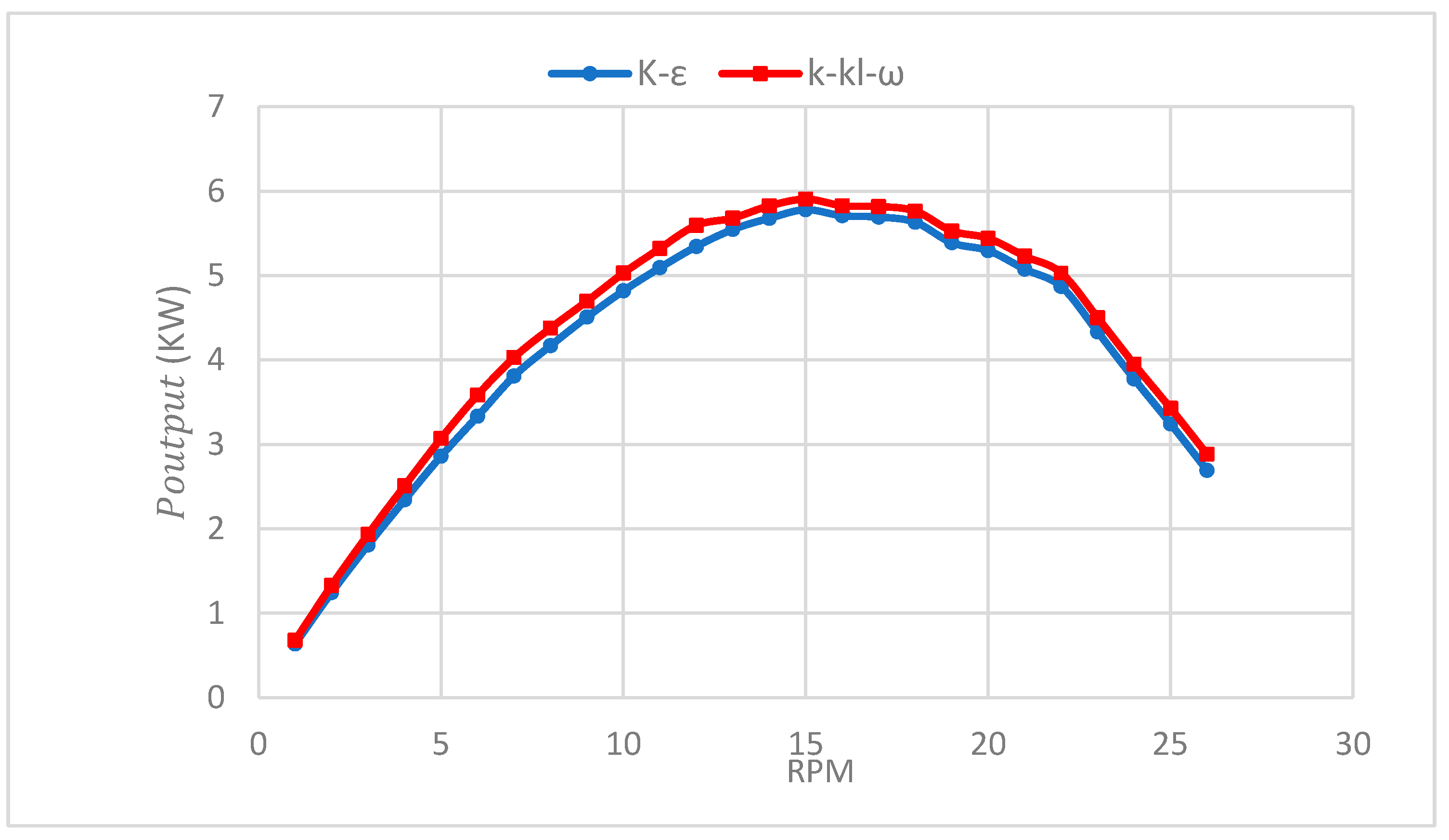
2.3. Turbulence Models
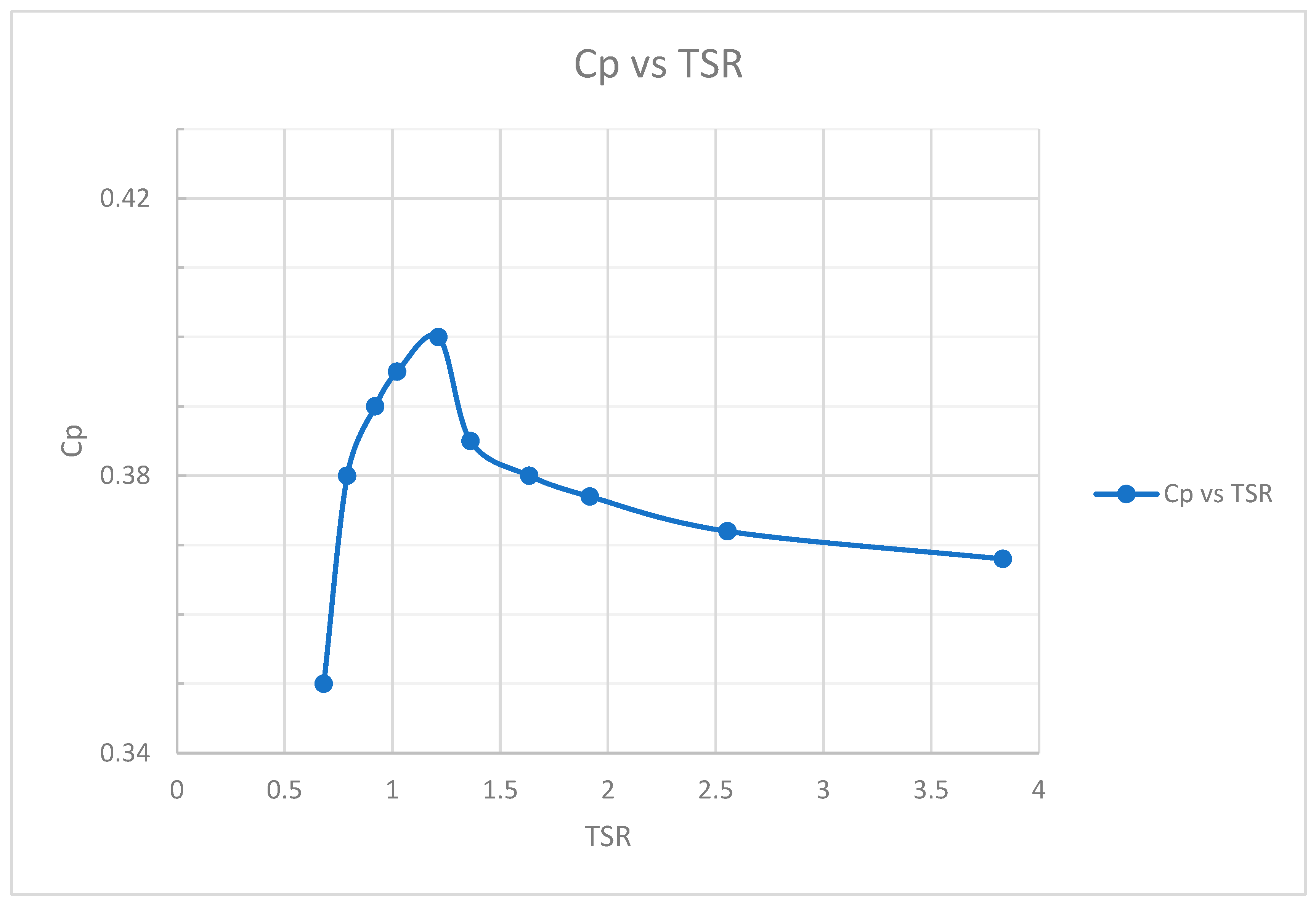
2.4. Performance Characteristics of Marine Turbines
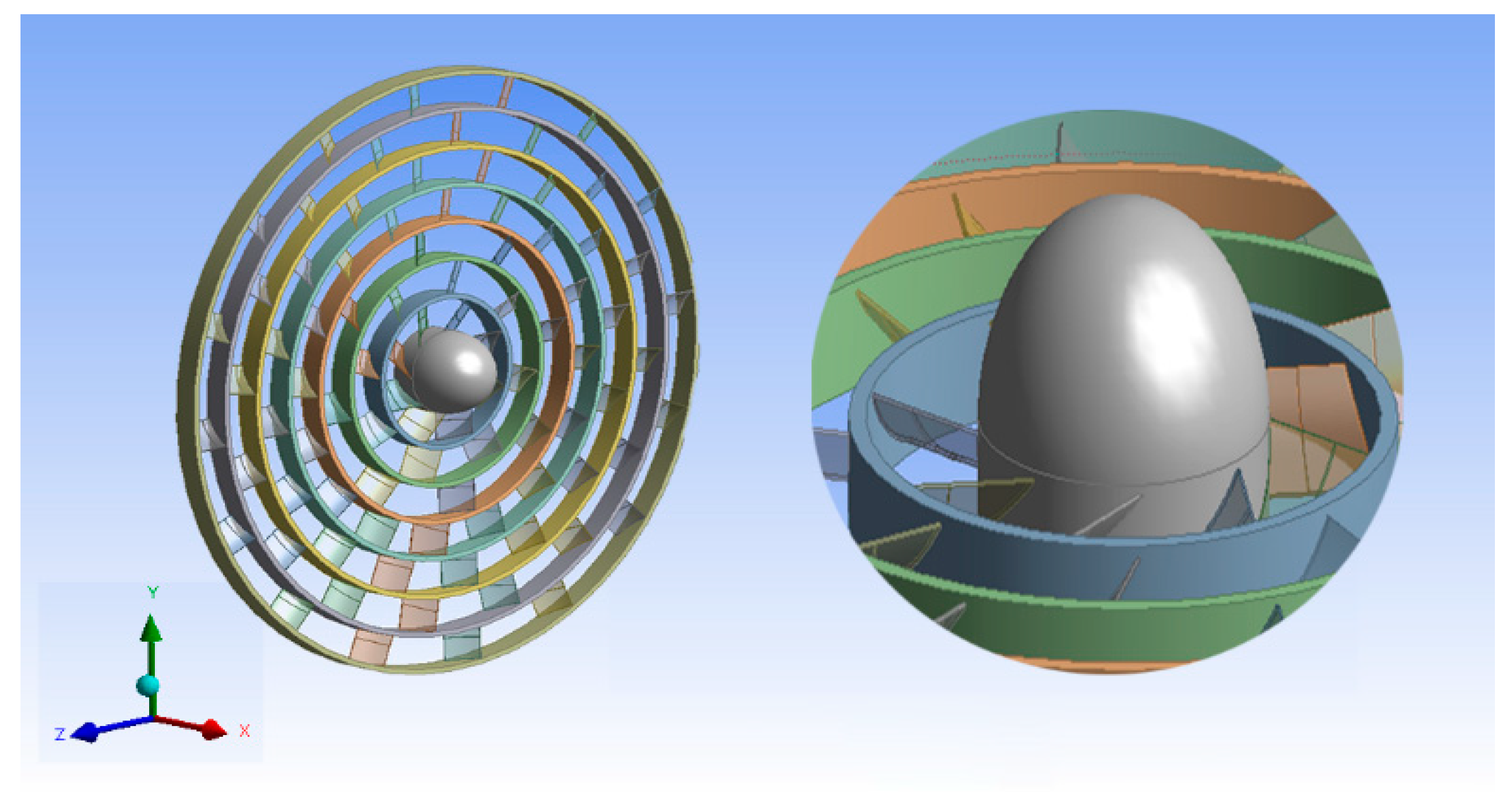
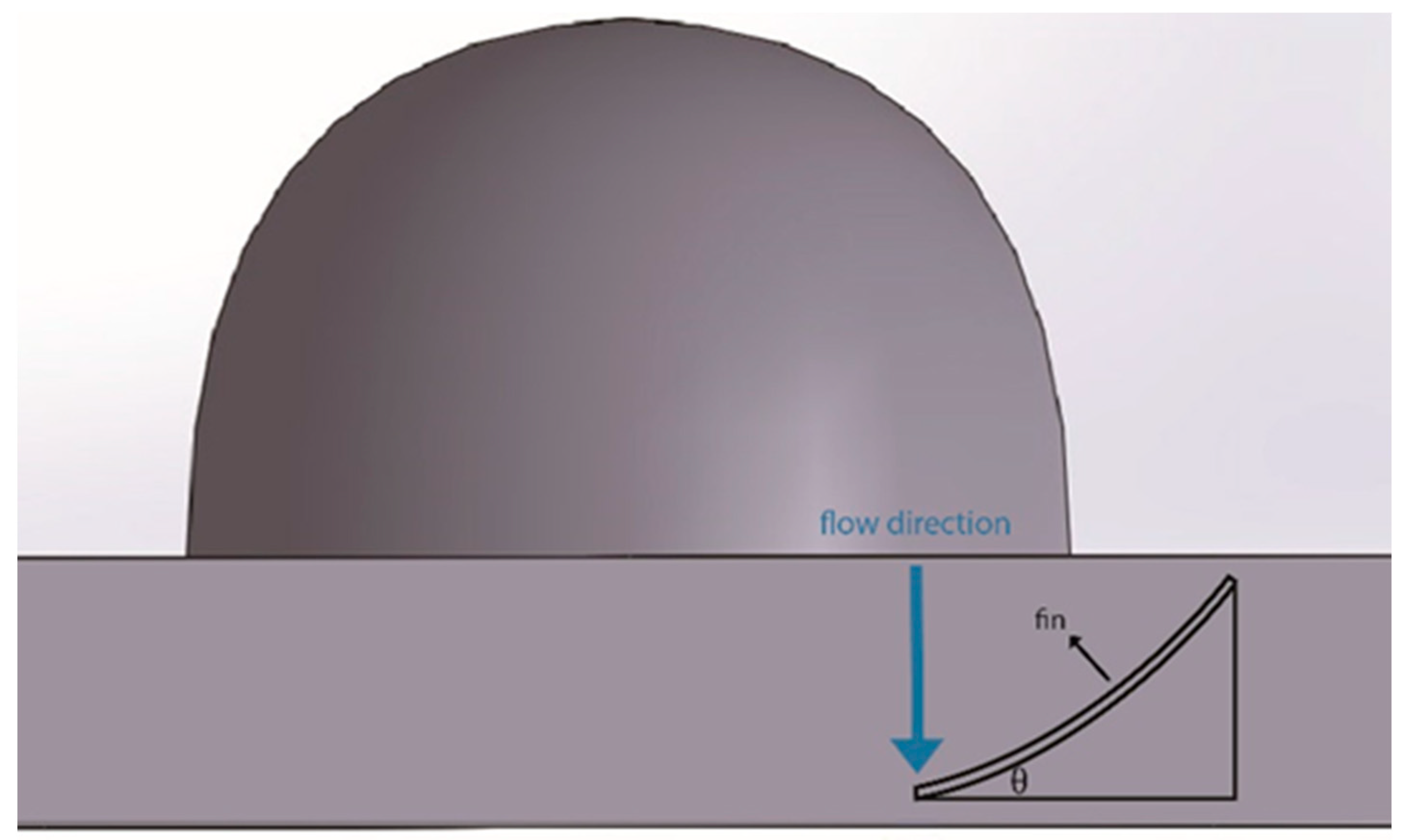
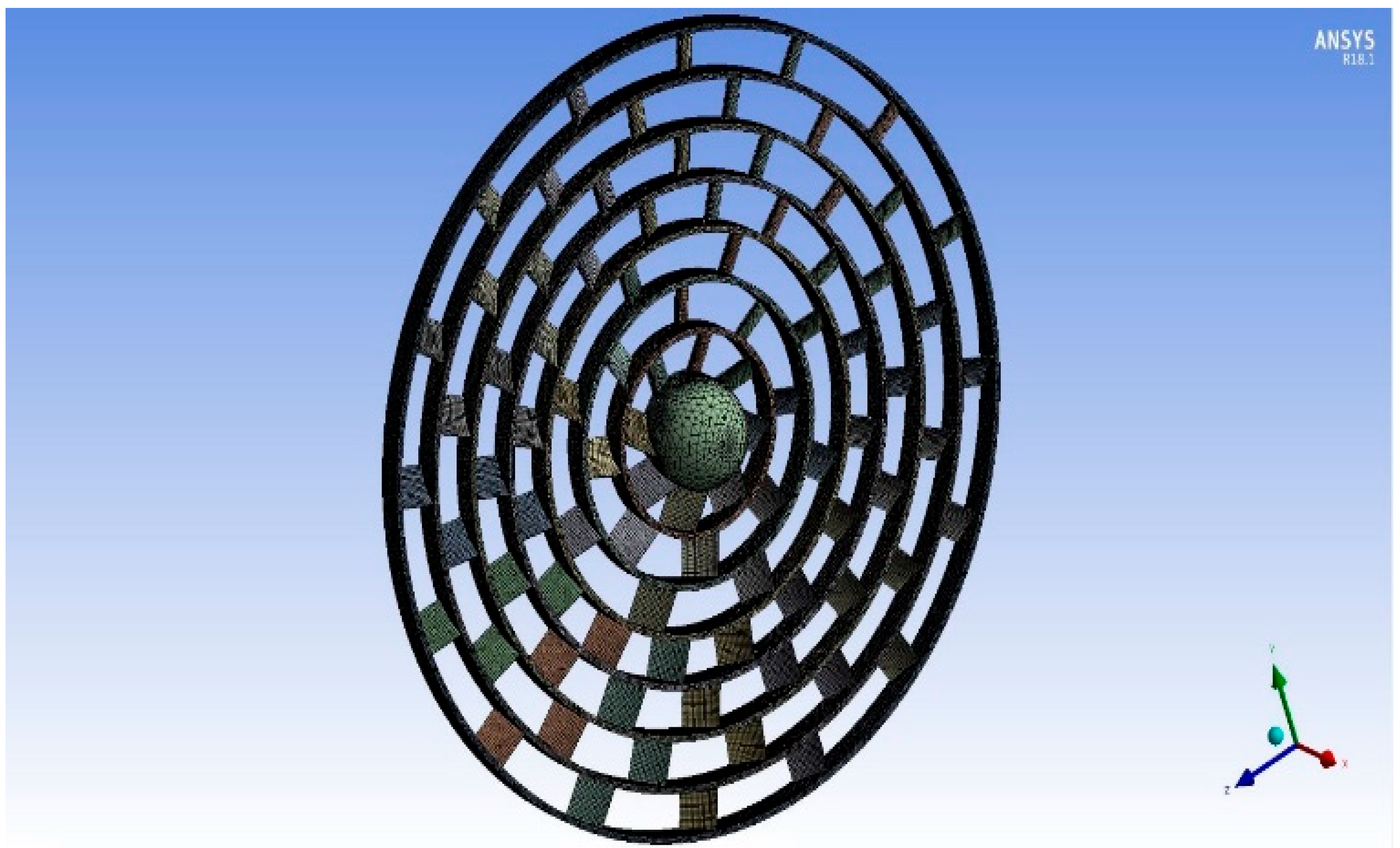
2.5. Fin-Ring Turbine 3D Model
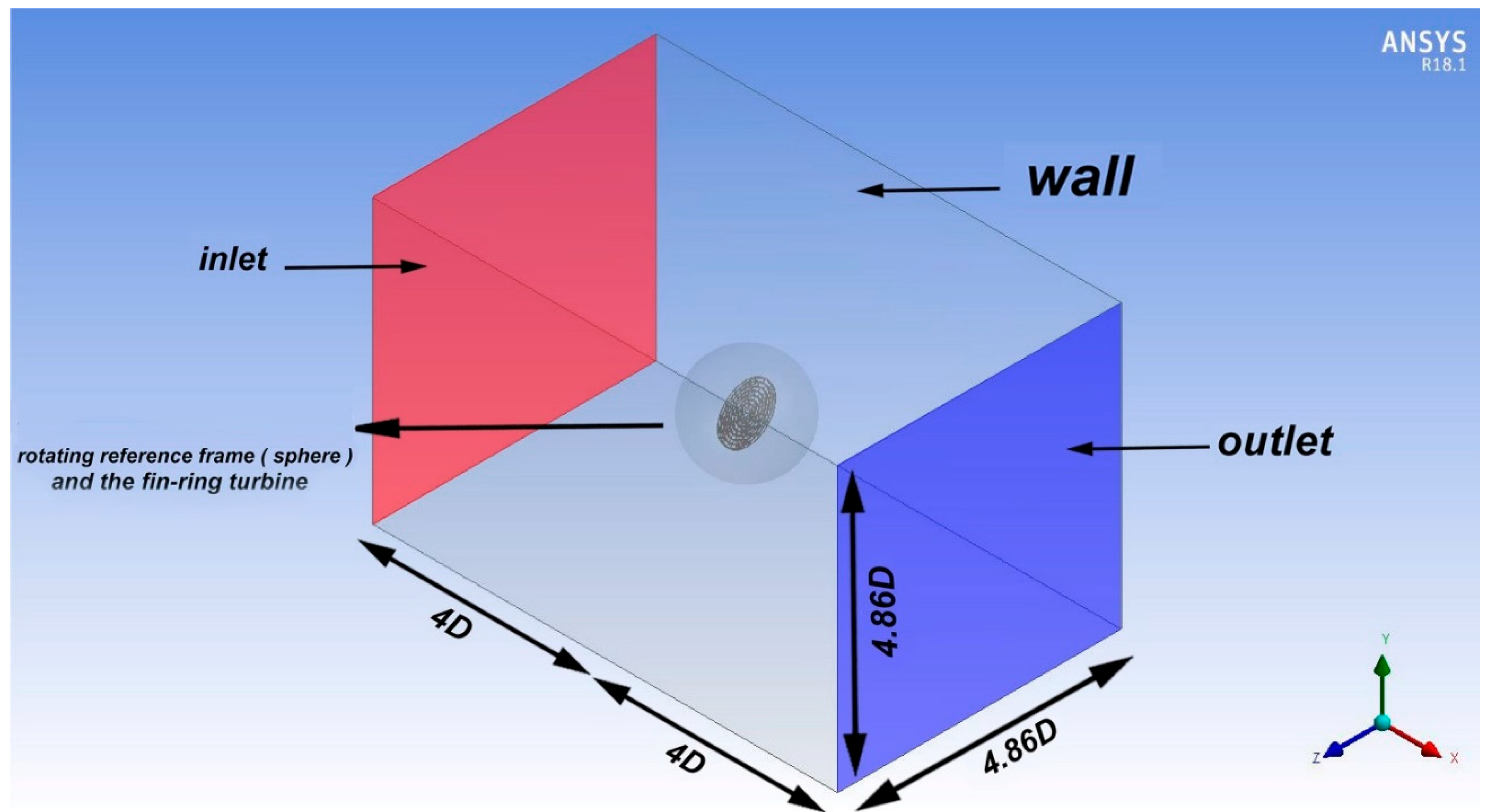
2.5.1. Computational Domain and Boundary Conditions
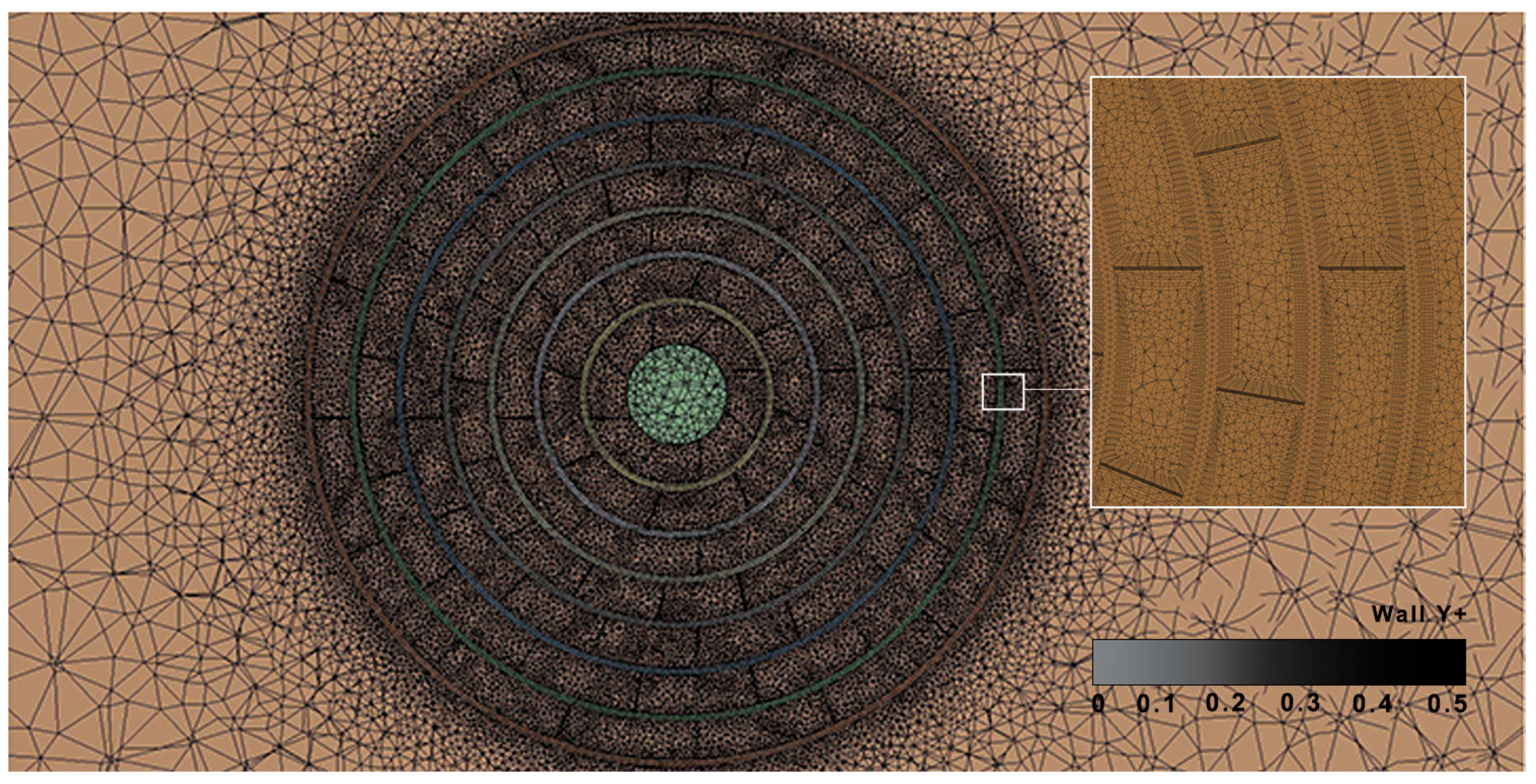
2.5.2. Mesh
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- Transport equation for turbulent kinetic energy, kt
- Transport equation for laminar kinetic energy,
- Transport equation for inverse turbulent time turbulent scalar diffusivity, is the inviscid near-wall scale, , defined as
References
- Gordon, M.; Weber, M. Global Energy Demand to Grow 47% by 2050, with Oil Still Top Source: US EIA. 2021. Available online: https://www.spglobal.com/commodityinsights/en/market-insights/latest-news/oil/100621-global-energy-demand-to-grow-47-by-2050-with-oil-still-top-source-us-eia (accessed on 1 January 2023).
- Bentley, R.W. Global Oil & Gas Depletion: An Overview. Energy Policy 2002, 30, 189–205. [Google Scholar] [CrossRef]
- Konrad, K. An Unexpected Future for Oil and Gas. Max Planck Research Magazine. 2022. Available online: https://www.mpg.de/19037054/an-unexpected-future-for-oil-and-gas (accessed on 1 January 2023).
- Esteban, M.D.; Espada, J.M.; Ortega, J.M.; López-Gutiérrez, J.-S.; Negro, V. What about Marine Renewable Energies in Spain? J. Mar. Sci. Eng. 2019, 7, 249. [Google Scholar] [CrossRef]
- Haas, K. Assessment of Energy Production Potential from Ocean Currents along the United States Coastline; Georgia Institute of Technology: Atlanta, GA, USA, 2013. [Google Scholar]
- Duerr, A.E.S.; Dhanak, M.R. Hydrokinetic Power Resource Assessment of the Florida Current. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010. [Google Scholar] [CrossRef]
- Chen, F. Kuroshio Power Plant Development Plan. Renew. Sustain. Energy Rev. 2010, 14, 2655–2668. [Google Scholar] [CrossRef]
- Brooks, D.A. The Hydrokinetic Power Resource in a Tidal Estuary: The Kennebec River of the Central Maine Coast. Renew. Energy 2011, 36, 1492–1501. [Google Scholar] [CrossRef]
- Xia, J.; Falconer, R.A.; Lin, B. Numerical Model Assessment of Tidal Stream Energy Resources in the Severn Estuary, UK. Proc. Inst. Mech. Eng. Part A J. Power Energy 2010, 224, 969–983. [Google Scholar] [CrossRef]
- Draper, S.; Adcock, T.A.A.; Borthwick, A.G.L.; Houlsby, G.T. Estimate of the Tidal Stream Power Resource of the Pentland Firth. Renew. Energy 2014, 63, 650–657. [Google Scholar] [CrossRef]
- Rashid, A. Status and Potentials of Tidal In-Stream Energy Resources in the Southern Coasts of Iran: A Case Study. Renew. Sustain. Energy Rev. 2012, 16, 6668–6677. [Google Scholar] [CrossRef]
- Byun, D.-S.; Hart, D.; Jeong, W.-J. Tidal Current Energy Resources off the South and West Coasts of Korea: Preliminary Observation-Derived Estimates. Energies 2013, 6, 566–578. [Google Scholar] [CrossRef]
- Calero Quesada, M.C.; García Lafuente, J.; Sánchez Garrido, J.C.; Sammartino, S.; Delgado, J. Energy of Marine Currents in the Strait of Gibraltar and Its Potential as a Renewable Energy Resource. Renew. Sustain. Energy Rev. 2014, 34, 98–109. [Google Scholar] [CrossRef]
- Mestres, M.; Cerralbo, P.; Grifoll, M.; Sierra, J.P.; Espino, M. Modelling Assessment of the Tidal Stream Resource in the Ria of Ferrol (NW Spain) Using a Year-Long Simulation. Renew. Energy 2019, 131, 811–817. [Google Scholar] [CrossRef]
- Carballo, R.; Iglesias, G.; Castro, A. Numerical Model Evaluation of Tidal Stream Energy Resources in the Ría de Muros (NW Spain). Renew. Energy 2009, 34, 1517–1524. [Google Scholar] [CrossRef]
- Mestres, M.; Griñó, M.; Sierra, J.P.; Mösso, C. Analysis of the Optimal Deployment Location for Tidal Energy Converters in the Mesotidal Ria de Vigo (NW Spain). Energy 2016, 115, 1179–1187. [Google Scholar] [CrossRef]
- Ramos, V.; Carballo, R.; Álvarez, M.; Sánchez, M.; Iglesias, G. A Port towards Energy Self-Sufficiency Using Tidal Stream Power. Energy 2014, 71, 432–444. [Google Scholar] [CrossRef]
- Ramos, V.; Iglesias, G. Performance Assessment of Tidal Stream Turbines: A Parametric Approach. Energy Convers. Manag. 2013, 69, 49–57. [Google Scholar] [CrossRef]
- Legaz, M.J.; Soares, C.G. Evaluation of various wave energy converters in the bay of Cádiz. Brodogr. Teor. I Praksa Brodogr. I Pomor. Teh. 2022, 73, 57–88. [Google Scholar] [CrossRef]
- Behrouzi, F.; Maimun, A.; Nakisa, M. Review of Various Designs and Development in Hydropower Turbines. Int. J. Mech. Aerosp. Ind. Mechatron. Manuf. Eng. 2014, 8, 293–297. [Google Scholar]
- Kusakana, K.; Vermaak, H.J. Hydrokinetic Power Generation for Rural Electricity Supply: Case of South Africa. Renew. Energy 2013, 55, 467–473. [Google Scholar] [CrossRef]
- Tian, W.; Song, B.; VanZwieten, J.H.; Pyakurel, P.; Li, Y. Numerical Simulations of a Horizontal Axis Water Turbine Designed for Underwater Mooring Platforms. Int. J. Nav. Archit. Ocean. Eng. 2016, 8, 73–82. [Google Scholar] [CrossRef]
- Elghali, S.E.B.; Benbouzid, M.E.H.; Charpentier, J.F.; Ahmed-Ali, T.; Munteanu, I. High-Order Sliding Mode Control of a Marine Current Turbine Driven Permanent Magnet Synchronous Generator. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009. [Google Scholar] [CrossRef]
- Hammerfest, A.H. Renewable Energy from Tidal Currents; Andritz Hydro: Charlotte, NC, USA, 2009. [Google Scholar]
- Thake, J. Development, Installation and Testing of a Large Scale Tidal Current Turbine. I T Power. 2005. Available online: https://www.osti.gov/etdeweb/biblio/20714897 (accessed on 1 January 2023).
- Gaden, D.L.F.; Bibeau, E.L. A Numerical Investigation into the Effect of Diffusers on the Performance of Hydro Kinetic Turbines Using a Validated Momentum Source Turbine Model. Renew. Energy 2010, 35, 1152–1158. [Google Scholar] [CrossRef]
- Kramm, G.; Sellhorst, G.; Ross, H.K.; Cooney, J.; Dlugi, R.; Mölders, N. On the Maximum of Wind Power Efficiency. J. Power Energy Eng. 2016, 4, 41001. [Google Scholar] [CrossRef]
- Bolin, W. Ocean Stream Power Generation: Unlocking a Source of Vast, Continuous, Renewable Energy. In Proceedings of the 2nd Marine Energy Technology Symposium, Seattle, WA, USA, 15–18 April 2014. [Google Scholar]
- Puertos del Estado. Predicción de Oleaje, Nivel del Mar; Boyas y Mareógrafos. Available online: https://www.puertos.es/en-us/oceanografia/Pages/portus.aspx (accessed on 1 January 2023).
- Batten, W.M.J.; Bahaj, A.S.; Molland, A.F.; Chaplin, J.R. Experimentally Validated Numerical Method for the Hydrodynamic Design of Horizontal Axis Tidal Turbines. Ocean. Eng. 2007, 34, 1013–1020. [Google Scholar] [CrossRef]
- Myers, L.; Bahaj, A.S. Power output performance characteristics of a horizontal axis marine current turbine. Renew. Energy 2006, 31, 211–222. [Google Scholar] [CrossRef]
- Lawson, M.J.; Li, Y.; Sale, D.C. Development and Verification of a Computational Fluid Dynamics Model of a Horizontal-Axis Tidal Current Turbine. In Proceedings of the International Conference on Ocean, Offshore and Arctic Engineering (ASME 2011), Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar] [CrossRef]
- Pape, A.L.; Lecanu, J. 3D Navier-Stokes Computations of a Stall-Regulated Wind Turbine. Wind Energy 2004, 7, 309–324. [Google Scholar] [CrossRef]
- Helal, M.M.; Ahmed, T.M.; Banawan, A.A.; Kotb, M.A. Numerical Prediction of the Performance of Marine Propellers Using Computational Fluid Dynamics Simulation with Transition-Sensitive Turbulence Model. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 233, 515–527. [Google Scholar] [CrossRef]
- Launder, B.E.; Spalding, D.B. The Numerical Computation of Turbulent Flows. Comput. Methods Appl. Mech. Eng. 1974, 3, 269–289. [Google Scholar] [CrossRef]
- Ibrahim, M.I.; Hamed, T.M.; Banawan, A.A. CFD Simulation of the Hydrodynamic Performance of a Fin-Ring Marine Current Turbine. In Sustainable Development and Innovations in Marine Technologies, Proceedings of the 18th International Congress of the Maritime Association of the Mediterranean (IMAM 2019), Varna, Bulgaria, 9–11 September 2019; CRC Press: Boca Raton, FL, USA; pp. 545–551. [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic of Fin-Ring Turbine | ||
|---|---|---|
| Number of rings | Nrings | 7 |
| Turbine diameter (outmost diameter) | D | 2.44 m |
| Spacing between rings (fin height) | S | 0.13 m |
| No. of fins | Nfins | 88 |
| Fin pitch angle | θ | 37.5° |
| Fin camber length | l | 0.01 m |
| Fin aspect ratio | ASR | 0.82 |
| Solver Settings and Discretization Method | |
|---|---|
| Solver type | Pressure-based (coupled) |
| Analysis type | Steady-state (totating frame of reference) |
| Turbulence model | Standard k-ε & K-kl-ω |
| Spatial discretization | 2nd order upwind for all the equations |
| Mesh Type | Coarse | Fine | Very Fine |
|---|---|---|---|
| No of elements | 1,093,221 | 4,143,649 | 6,153,212 |
| Cp | 0.350 | 0.392 | 0.401 |
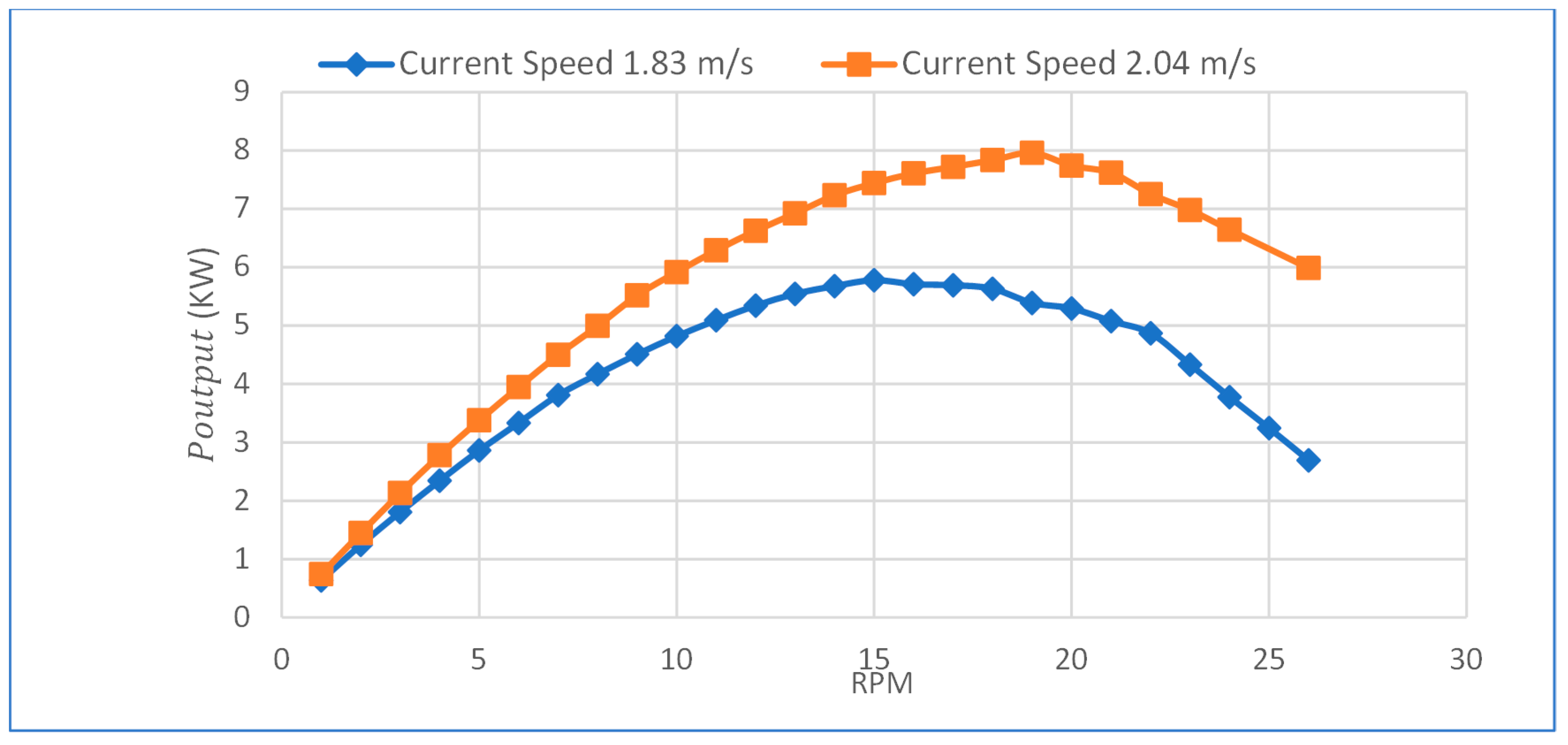
| CFD and Power Test Results Validation | ||||
|---|---|---|---|---|
| Current speed (m/s) | 1.83 | 2.04 | ||
| Type of result | CFD | Field | CFD | Field |
| Poutput (kW) | 5.78 | 5.9 | 7.96 | 8.2 |
| Cp | 0.392 | 0.40 | 0.388 | 0.4 |
| RPE (%) | 2 | 3 | ||
| Average Current Speed in m/s. Year 2022 | ||
|---|---|---|
| Gulf of Cádiz buoy | Cape Palos buoy | Cape Begur buoy |
| 0.45 | 0.55 | 0.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ibrahim, M.I.; Legaz, M.J. Hydrokinetic Power Potential in Spanish Coasts Using a Novel Turbine Design. J. Mar. Sci. Eng. 2023, 11, 942. https://doi.org/10.3390/jmse11050942
Ibrahim MI, Legaz MJ. Hydrokinetic Power Potential in Spanish Coasts Using a Novel Turbine Design. Journal of Marine Science and Engineering. 2023; 11(5):942. https://doi.org/10.3390/jmse11050942
Chicago/Turabian StyleIbrahim, Mahmoud I., and María José Legaz. 2023. "Hydrokinetic Power Potential in Spanish Coasts Using a Novel Turbine Design" Journal of Marine Science and Engineering 11, no. 5: 942. https://doi.org/10.3390/jmse11050942