
Parameter Prediction of the Non-Linear Nomoto Model for Different Ship Loading Conditions Using Support Vector Regression

Abstract
:1. Introduction
- (1)
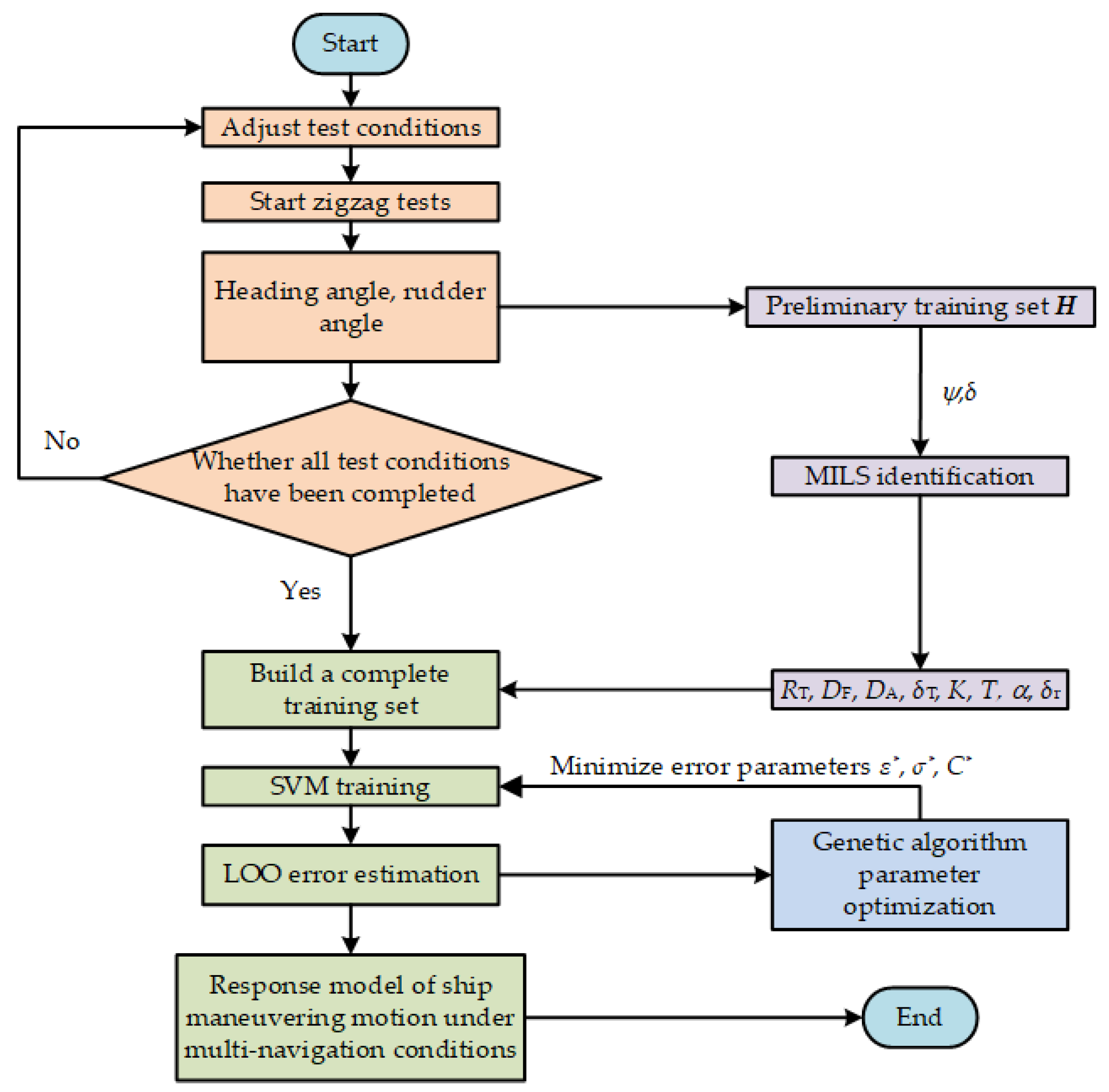
- We propose a parameter prediction method for ship maneuvering motion models based on SVR. A training dataset of non-linear Nomoto model parameters under various navigation conditions is established. The proposed algorithm has good prediction accuracy and can quickly obtain the maneuvering model parameters.
- (2)
- We use the MILS method to identify the parameters of the non-linear Nomoto model under various navigation conditions. Additionally, the effects of rudder angle, engine speed, trim, and load on the maneuvering parameters are analyzed, providing an optimal direction for ship maneuvering and control.
- (3)
- Based on the parameter identification of the Nomoto model, we include the engine speed, bow and stern draft, and test rudder angle into the training set. The predicted maneuvering motion model can change with navigation conditions, matching the dynamics of the cargo ship in the daily voyage.
2. Parameter Identification of Maneuvering Motion Model
2.1. Ship Maneuvering Motion Model
2.2. Model Parameter Identification
2.2.1. Model Discretization
2.2.2. Identification Based on LS
2.2.3. Identification Based on MILS
3. Parameter Prediction of Maneuvering Motion Model
3.1. Analysis of Navigation Parameters
- (1)
- Engine speed
- (2)
- Bow draft and stern draft
- (3)
- Test rudder angle
3.2. Parameter Training Based on SVR
3.3. Evaluation Indicators
4. Test Verification
4.1. Scaled Free-Running Ship Model Test System
4.2. Test Conditions
4.3. Test Data Analysis
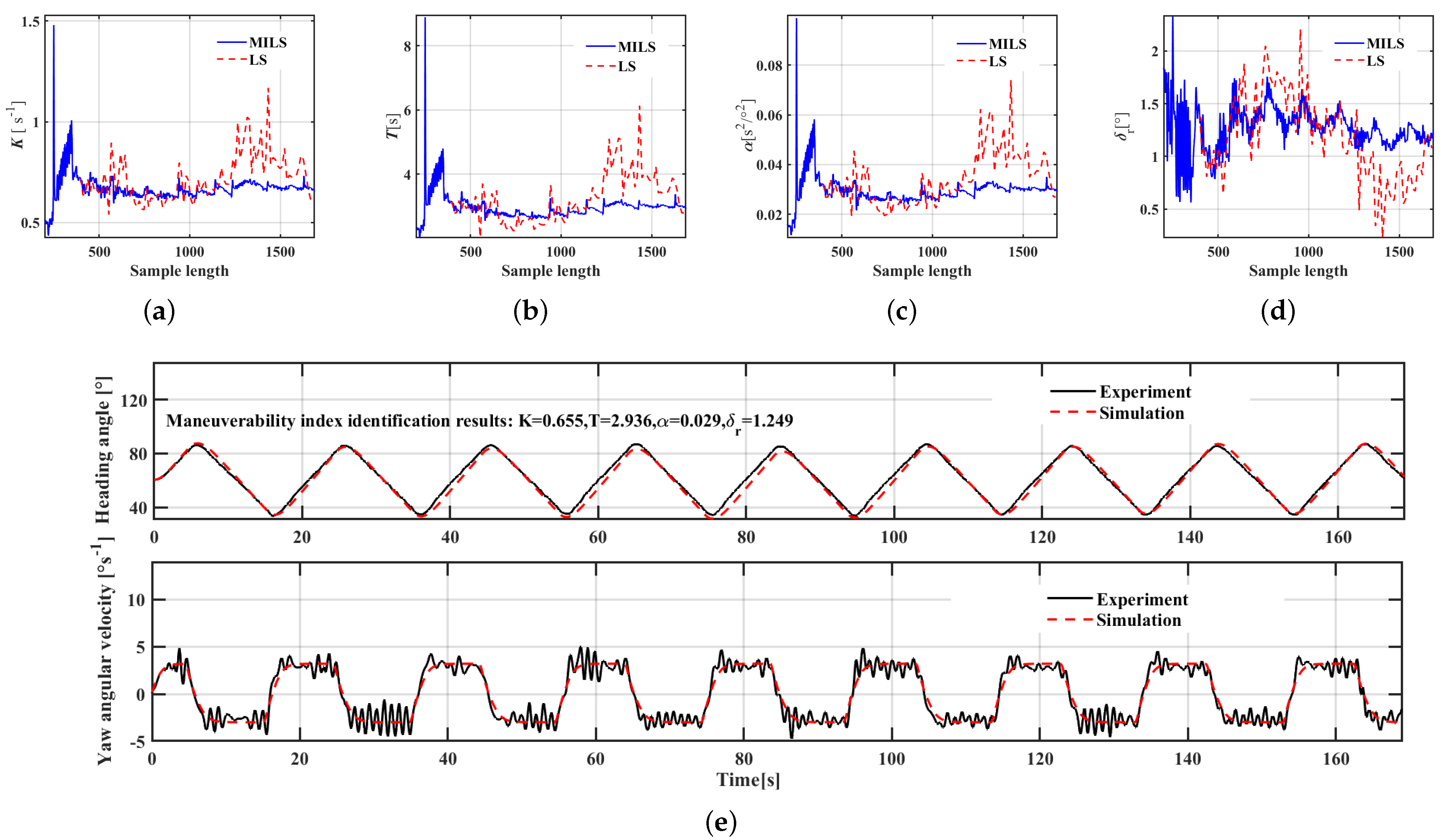
4.3.1. Parameter Identification
4.3.2. Parameter Training
4.4. Model Accuracy Verification
5. Conclusions and Prospects
- (1)
- The MILS and LS methods have good accuracy for parameter identification with the first-order non-linear Nomoto models. In general, the MILS method converges faster than the LS method. Thus, the MILS method was used to identify the parameters of the first-order Nomoto model with different maneuvering motions. The resulting dataset was trained using the SVR-based method to predict 15/15 and 25/25 zigzag motions. The results show that the SVR-based prediction method can obtain the Nomoto model parameters quickly, although the accuracy is slightly lower than that of the MILS method.
- (2)
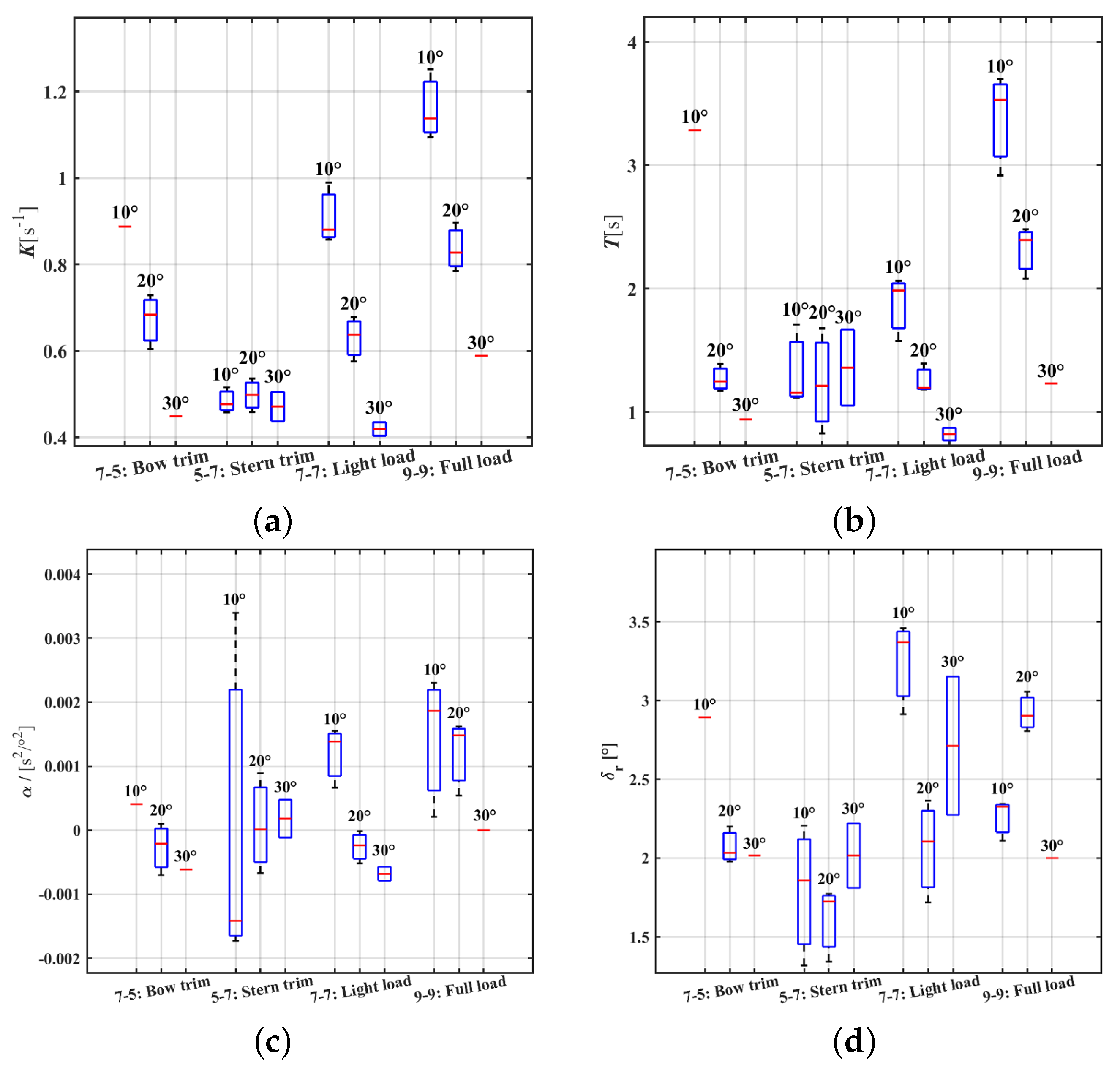
- The effects of rudder angle, engine speed, bow trim, stern trim, and load on the maneuvering coefficients were analyzed. K and T are larger in the bow trim condition than in the stern trim condition. In the full load condition, K and T are larger. K and T decrease as the rudder angle increases. Additionally, higher speeds lead to higher K values and lower T values. At an engine speed of 2000 rpm, approaches zero as the rudder angle increases; however, this does not occur at an engine speed of 3000 rpm. The effective neutral rudder angle exhibits strong randomness under different conditions, making it difficult to determine the variation pattern of this parameter and its hydrodynamic action mechanism.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Engine Speed (rpm) | Test Rudder Angle () | Bow Draft (cm) | Stern Draft (cm) | K (s) | T (s) | a (s/) | () | Weight |
|---|---|---|---|---|---|---|---|---|
| 2000 | 10 | 7 | 5 | 7.49 | 3.52 | 6.68 | 2.59 | 6.24 |
| 2000 | 10 | 7 | 5 | 9.19 | 4.16 | 2.58 | 1.61 | 4.68 |
| 2000 | 10 | 7 | 5 | 9.48 | 4.62 | 4.04 | 2.69 | 1.45 |
| 2000 | 10 | 7 | 5 | 1.03 | 4.59 | 5.21 | 1.72 | 9.97 |
| 2000 | 20 | 7 | 5 | 5.18 | 2.16 | 1.85 | 2.83 | 4.15 |
| 2000 | 20 | 7 | 5 | 4.38 | 1.88 | −1.14 | 2.80 | 7.69 |
| 2000 | 20 | 7 | 5 | 4.99 | 2.03 | −2.11 | 2.67 | 9.60 |
| 2000 | 20 | 7 | 5 | 4.90 | 2.14 | 8.27 | 2.09 | 2.63 |
| 2000 | 30 | 7 | 5 | 3.26 | 1.45 | −1.22 | 3.55 | 5.14 |
| 2000 | 10 | 7 | 7 | 5.91 | 2.36 | 5.85 | 1.69 | 4.74 |
| 2000 | 10 | 7 | 7 | 6.49 | 2.73 | 2.80 | 2.33 | 9.43 |
| 2000 | 10 | 7 | 7 | 7.04 | 3.06 | 4.46 | 2.27 | 9.79 |
| 2000 | 20 | 7 | 7 | 4.46 | 1.80 | 9.38 | 2.97 | 9.83 |
| 2000 | 20 | 7 | 7 | 4.53 | 1.88 | 1.99 | 2.96 | 9.34 |
| 2000 | 20 | 7 | 7 | 4.05 | 1.92 | −8.31 | 2.75 | 8.01 |
| 2000 | 20 | 7 | 7 | 5.41 | 2.21 | 2.24 | 2.85 | 9.93 |
| 2000 | 30 | 7 | 7 | 3.32 | 1.50 | −5.63 | 3.90 | 7.37 |
| 2000 | 30 | 7 | 7 | 3.87 | 1.74 | 6.29 | 4.03 | 9.11 |
| 2000 | 10 | 9 | 9 | 1.24 | 7.94 | 2.89 | 2.80 | 5.58 |
| 2000 | 10 | 9 | 9 | 9.89 | 5.31 | 1.20 | 2.23 | 3.45 |
| 2000 | 10 | 9 | 9 | 9.41 | 5.50 | 1.48 | 2.43 | 8.67 |
| 2000 | 10 | 9 | 9 | 1.18 | 6.62 | 1.87 | 2.71 | 5.57 |
| 2000 | 20 | 9 | 9 | 8.54 | 5.63 | 1.39 | 2.83 | 1.00 |
| 2000 | 20 | 9 | 9 | 6.67 | 4.00 | 5.29 | 2.54 | 8.76 |
| 2000 | 20 | 9 | 9 | 7.20 | 4.41 | 9.80 | 3.14 | 8.32 |
| 2000 | 30 | 9 | 9 | 3.60 | 2.23 | 7.08 | 3.72 | 4.92 |
| 2000 | 30 | 9 | 9 | 3.60 | 2.23 | 7.08 | 3.72 | 4.92 |
| 2000 | 30 | 9 | 9 | 4.83 | 3.33 | 4.99 | 3.57 | 6.89 |
| 2000 | 30 | 9 | 9 | 3.47 | 2.30 | −2.75 | 3.46 | 8.10 |
| 2000 | 10 | 5 | 7 | 3.04 | 1.26 | −6.21 | −3.25 | 2.12 |
| 2000 | 10 | 5 | 7 | 2.97 | 7.04 | −6.71 | 1.02 | 9.96 |
| 2000 | 10 | 5 | 7 | 2.84 | 8.30 | −1.08 | 8.96 | 8.57 |
| 2000 | 10 | 5 | 7 | 3.10 | 8.86 | −7.05 | 1.66 | 8.57 |
| 2000 | 20 | 5 | 7 | 3.27 | 8.03 | −8.84 | 1.28 | 6.36 |
| 2000 | 20 | 5 | 7 | 2.95 | 7.10 | −2.97 | 1.76 | 8.17 |
| 2000 | 30 | 5 | 7 | 2.66 | 7.43 | −1.54 | 1.73 | 8.48 |
| 2000 | 30 | 5 | 7 | 2.86 | 7.06 | −1.01 | 3.07 | 8.70 |
| 2000 | 30 | 5 | 7 | 3.20 | 1.08 | 2.14 | 3.48 | 7.23 |
| Engine Speed (rpm) | Test Rudder Angle () | Bow Draft (cm) | Stern Draft (cm) | K (s) | T (s) | a (s/) | () | Weight |
|---|---|---|---|---|---|---|---|---|
| 3000 | 20 | 7 | 5 | 7.29 | 1.39 | 1.01 | 2.03 | 8.32 |
| 3000 | 20 | 7 | 5 | 6.04 | 1.17 | −7.03 | 1.98 | 6.30 |
| 3000 | 20 | 7 | 5 | 6.84 | 1.25 | −2.13 | 2.20 | 8.97 |
| 3000 | 30 | 7 | 5 | 4.49 | 9.40 | −6.16 | 2.52 | 4.21 |
| 3000 | 10 | 7 | 7 | 8.58 | 1.58 | 6.65 | 3.46 | 6.35 |
| 3000 | 10 | 7 | 7 | 9.89 | 2.06 | 1.55 | 2.91 | 8.99 |
| 3000 | 10 | 7 | 7 | 8.81 | 1.99 | 1.39 | 3.37 | 7.25 |
| 3000 | 20 | 7 | 7 | 6.79 | 1.39 | −1.76 | 2.36 | 2.71 |
| 3000 | 20 | 7 | 7 | 5.76 | 1.18 | −5.17 | 1.72 | 6.76 |
| 3000 | 20 | 7 | 7 | 6.38 | 1.20 | −2.36 | 2.10 | 8.99 |
| 3000 | 30 | 7 | 7 | 4.04 | 7.69 | −7.91 | 2.27 | 4.87 |
| 3000 | 30 | 7 | 7 | 4.35 | 8.73 | −5.76 | 3.15 | 7.23 |
| 3000 | 10 | 9 | 9 | 1.25 | 3.70 | 2.30 | 2.32 | 8.40 |
| 3000 | 10 | 9 | 9 | 1.10 | 2.92 | 2.06 | 2.34 | 7.43 |
| 3000 | 10 | 9 | 9 | 1.14 | 3.53 | 1.86 | 2.11 | 3.38 |
| 3000 | 20 | 9 | 9 | 8.96 | 2.48 | 1.48 | 3.06 | 6.07 |
| 3000 | 20 | 9 | 9 | 8.28 | 2.39 | 1.62 | 2.90 | 9.16 |
| 3000 | 20 | 9 | 9 | 7.85 | 2.08 | 5.39 | 2.81 | 7.20 |
| 3000 | 10 | 5 | 7 | 4.58 | 1.16 | −1.42 | 1.32 | 9.43 |
| 3000 | 10 | 5 | 7 | 4.77 | 1.11 | −1.73 | 2.21 | 9.15 |
| 3000 | 10 | 5 | 7 | 5.16 | 1.71 | 3.40 | 1.86 | 8.87 |
| 3000 | 20 | 5 | 7 | 4.98 | 1.21 | 1.19 | 1.77 | 6.96 |
| 3000 | 20 | 5 | 7 | 5.36 | 1.68 | 8.87 | 1.72 | 6.24 |
| 3000 | 20 | 5 | 7 | 4.59 | 8.25 | −6.71 | 1.34 | 8.04 |
| 3000 | 30 | 5 | 7 | 4.37 | 1.05 | −1.18 | 1.81 | 5.79 |
| 3000 | 30 | 5 | 7 | 5.05 | 1.67 | 4.75 | 2.22 | 4.12 |
References
- Zhang, M.; Kujala, P.; Hirdaris, S. A machine learning method for the evaluation of ship grounding risk in real operational conditions. Reliab. Eng. Syst. Saf. 2022, 226, 108697. [Google Scholar] [CrossRef]
- Zhang, M.; Taimuri, G.; Zhang, J.; Hirdaris, S. A deep learning method for the prediction of 6-DoF ship motions in real conditions. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2023; online first. [Google Scholar] [CrossRef]
- Abkowitz, M.A. Lectures on Ship Hydrodynamics–Steering and Manoeuvrability; Technical Report Hy-5; Hydro-and Aerodynamic Laboratory: Lyngby, Denmark, 1964. [Google Scholar]
- Norrbin, N.H. Theory and Observations on the Use of a Mathematical Model for Ship Manoeuvring in Deep and Confined Waters; Publication 68 of the Swedish State Shipbuilding Experimental Tank, Göteborg, Sweden. In Proceedings of the 8th Symposium on Naval Hydrodynamics, ONR, Pasadena, CA, USA, 24–28 August 1971; pp. E807–E905. [Google Scholar]
- Ogawa, A.; Kasai, H. On the mathematical model of manoeuvring motion of ships. Int. Shipbuild. Prog. 1978, 25, 306–319. [Google Scholar] [CrossRef]
- Nomoto, K.; Taguchi, K.; Honda, K.; Hirano, S. On the steering qualities of ships. J. Zosen Kiokai 1956, 1956, 75–82. [Google Scholar] [CrossRef] [PubMed]
- Araki, M.; Sadat-Hosseini, H.; Sanada, Y.; Tanimoto, K.; Umeda, N.; Stern, F. Estimating maneuvering coefficients using system identification methods with experimental, system-based, and CFD free-running trial data. Ocean Eng. 2012, 51, 63–84. [Google Scholar] [CrossRef]
- Carrillo, S.; Contreras, J. Obtaining first and second order Nomoto models of a fluvial support patrol using identification techniques. Ship Sci. Technol. 2018, 11, 19–28. [Google Scholar] [CrossRef]
- Xu, H.; Hinostroza, M.; Soares, C.G. Estimation of hydrodynamic coefficients of a nonlinear manoeuvring mathematical model with free-running ship model tests. Int. J. Marit. Eng. 2018, 160, A3. [Google Scholar] [CrossRef]
- Caccia, M.; Indiveri, G.; Veruggio, G. Modeling and identification of open-frame variable configuration unmanned underwater vehicles. IEEE J. Ocean. Eng. 2000, 25, 227–240. [Google Scholar] [CrossRef]
- Luo, W.; Guedes Soares, C.; Zou, Z. Parameter identification of ship maneuvering model based on support vector machines and particle swarm optimization. J. Offshore Mech. Arct. Eng. 2016, 138, 031101. [Google Scholar] [CrossRef]
- Zhu, M.; Hahn, A.; Wen, Y.; Bolles, A. Parameter identification of ship maneuvering models using recursive least square method based on support vector machines. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 23–29. [Google Scholar] [CrossRef]
- Xue, Y.; Liu, Y.; Ji, C.; Xue, G. Hydrodynamic parameter identification for ship manoeuvring mathematical models using a Bayesian approach. Ocean Eng. 2020, 195, 106612. [Google Scholar] [CrossRef]
- He, H.W.; Zou, Z.J. Black-box modeling of ship maneuvering motion using system identification method based on BP neural network. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Virtual, 3–7 August 2020; Volume 84386, p. V06BT06A037. [Google Scholar]
- Wang, T.; Li, G.; Wu, B.; Æsøy, V.; Zhang, H. Parameter identification of ship manoeuvring model under disturbance using support vector machine method. Ships Offshore Struct. 2021, 16, 13–21. [Google Scholar] [CrossRef]
- Borkowski, P. Inference engine in an intelligent ship course-keeping system. Comput. Intell. Neurosci. 2017, 2017, 2561383. [Google Scholar] [CrossRef] [PubMed]
- Himaya, A.N.; Sano, M.; Suzuki, T.; Shirai, M.; Hirata, N.; Matsuda, A.; Yasukawa, H. Effect of the loading conditions on the maneuverability of a container ship. Ocean Eng. 2022, 247, 109964. [Google Scholar] [CrossRef]
- Zhang, M.; Conti, F.; Le Sourne, H.; Vassalos, D.; Kujala, P.; Lindroth, D.; Hirdaris, S. A method for the direct assessment of ship collision damage and flooding risk in real conditions. Ocean Eng. 2021, 237, 109605. [Google Scholar] [CrossRef]
- Huajun, Z.; Xinchi, T.; Hang, G.; Shou, X. The parameter identification of the autonomous underwater vehicle based on multi-innovation least squares identification algorithm. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420921016. [Google Scholar] [CrossRef]
- Wang, S.; Wang, L.; Im, N.; Zhang, W.; Li, X. Real-time parameter identification of ship maneuvering response model based on nonlinear Gaussian Filter. Ocean Eng. 2022, 247, 110471. [Google Scholar] [CrossRef]
- Tzeng, C.Y.; Chen, J.F. Fundamental properties of linear ship steering dynamic models. J. Mar. Sci. Technol. 2009, 7, 2. [Google Scholar] [CrossRef]
- Hinostroza, M.; Xu, H.; Guedes Soares, C. Experimental and Numerical Simulations of Zig-Zag Manoeuvres of a Self-Running Ship Model; Taylor & Francis Group: London, UK, 2017; pp. E563–E570. [Google Scholar]
- Xie, S.; Chu, X.; Liu, C.; Liu, J.; Mou, J. Parameter identification of ship motion model based on multi-innovation methods. J. Mar. Sci. Technol. 2020, 25, 162–184. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, X.; Liang, C. A Novel Parameter Identification Algorithm for 3-DOF Ship Maneuvering Modelling Using Nonlinear Multi-Innovation. J. Mar. Sci. Eng. 2022, 10, 581. [Google Scholar] [CrossRef]
- Cherkassky, V.; Ma, Y. Practical selection of SVM parameters and noise estimation for SVM regression. Neural Netw. 2004, 17, 113–126. [Google Scholar] [CrossRef]
- Simman. Workshop on Verification and Validation of Ship Manoeuvring Simulation Methods. 2014. Available online: http://simman2014.dk (accessed on 1 March 2022).
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef]
- Yoshimura, Y.; Ueno, M.; Tsukada, Y. Analysis of steady hydrodynamic force components and prediction of manoeuvring ship motion with KVLCC1, KVLCC2 and KCS. In Proceedings of the Workshop Proceedings of SIMMAN2008, Copenhagen, Denmark, 7 April 2008; Volume 1, pp. E80–E86. [Google Scholar]








| Parameter | Full-Scale Ship | Scaled Ship Model |
|---|---|---|
| Scale ratio | 1:1 | 1:266 |
| Length between perpendiculars () | 320 m | 1.200 m |
| Maximum beam of waterline | 58 m | 0.217 m |
| Depth | 30 m | 0.112 m |
| Draft | 20.8 m | 0.078 m |
| Displacement | 312,622 t | 16.42 kg |
| Propeller diameter | 9.86 m | 37 mm |
| Number of propeller blades | 4 | 4 |
| Propeller area ratio | 0.431 | 0.431 |
| Rudder area | 135.9 m | 0.00192 m |
| Rudder turning rate | 2.34/s | 38.24/s |
| Navigation Condition | Engine Speed (rpm) | Bow Draft (cm) | Stern Draft (cm) | Test Rudder Angle () |
|---|---|---|---|---|
| Light load | 2000 | 7 | 7 | 10/10 20/20 30/30 |
| 3000 | 7 | 7 | ||
| Full load | 2000 | 9 | 9 | |
| 3000 | 9 | 9 | ||
| Bow trim | 2000 | 7 | 5 | |
| 3000 | 7 | 5 | ||
| Stern trim | 2000 | 5 | 7 | |
| 3000 | 5 | 7 |
| Nomoto Model Parameters | Kernel Function Parameters of SVR | ||
|---|---|---|---|
| K (s) | 0.000002 | 0.86 | 1.175 |
| T (s) | 0.001 | 2.561 | 0.922 |
| a (s/) | 0.000001 | 0.156 | 0.021 |
| () | 0.00002 | 4.0103 | 1.041 |
| Verification Condition | Navigation Condition Parameters | K (s) | T (s) | a (s/) | () | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Engine Speed (rpm) | Rudder Angle () | Bow Draft (cm) | Stern Draft (cm) | MILS | SVR | MILS | SVR | MILS | SVR | MILS | SVR | |
| 1 | 2000 | 15 | 8 | 8 | 0.559 | 0.566 | 4.282 | 4.009 | −0.004 | 0.0094 | 0.492 | 0.620 |
| 2 | 2500 | 25 | 6 | 8 | 0.415 | 0.430 | 1.228 | 1.303 | 0.023 | 0.0076 | 2.013 | 2.419 |
| Surge Force Derivatives | Lateral Force Derivatives | Yaw Moment Derivatives | |||
|---|---|---|---|---|---|
| 0.022 | −0.315 | −0.137 | |||
| −0.040 | 0.083 | −0.049 | |||
| 0.002 | −1.607 | −0.030 | |||
| 0.011 | 0.379 | −0.294 | |||
| 0.771 | −0.391 | 0.055 | |||
| 0.008 | −0.013 | ||||
| Verification Condition | Overshoot Angle | Test () | MILS () | SVR () | MMG () |
|---|---|---|---|---|---|
| 1 | 1st overshoot | 12.17 | 7.89 | 7.51 | 10.71 |
| 2nd overshoot | 13.62 | 11.7 | 8.97 | 12.31 | |
| 2 | 1st overshoot | 12.03 | 8.97 | 7.75 | 16.88 |
| 2nd overshoot | 12.04 | 8.13 | 6.62 | 14.96 |
| Verification Condition | Method | RMSE () | PCC |
|---|---|---|---|
| 1 | MILS | 3.8414 | 0.9839 |
| SVR | 5.9296 | 0.9639 | |
| MMG | 5.3710 | 0.9725 | |
| 2 | MILS | 4.8138 | 0.9847 |
| SVR | 6.2458 | 0.9733 | |
| MMG | 7.1617 | 0.9638 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lan, J.; Zheng, M.; Chu, X.; Ding, S. Parameter Prediction of the Non-Linear Nomoto Model for Different Ship Loading Conditions Using Support Vector Regression. J. Mar. Sci. Eng. 2023, 11, 903. https://doi.org/10.3390/jmse11050903
Lan J, Zheng M, Chu X, Ding S. Parameter Prediction of the Non-Linear Nomoto Model for Different Ship Loading Conditions Using Support Vector Regression. Journal of Marine Science and Engineering. 2023; 11(5):903. https://doi.org/10.3390/jmse11050903
Chicago/Turabian StyleLan, Jiafen, Mao Zheng, Xiumin Chu, and Shigan Ding. 2023. "Parameter Prediction of the Non-Linear Nomoto Model for Different Ship Loading Conditions Using Support Vector Regression" Journal of Marine Science and Engineering 11, no. 5: 903. https://doi.org/10.3390/jmse11050903