
R&D of an Innovative OFDM Communication Payload for Small-Size AUV

Abstract
:1. Introduction
2. Systems and Methods
2.1. Basic Signal Model
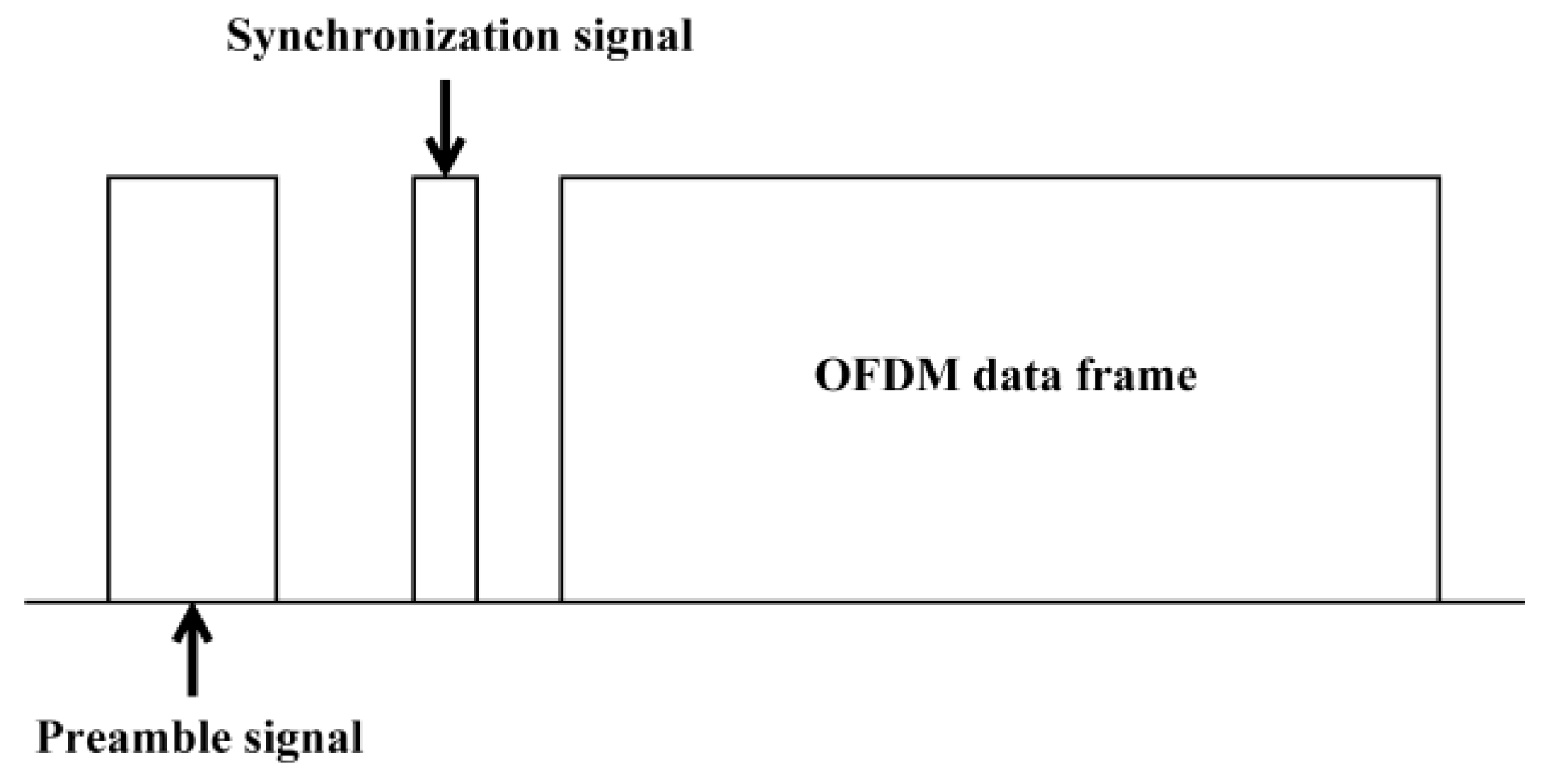
2.2. Time-Frequency Differential OFDM Scheme
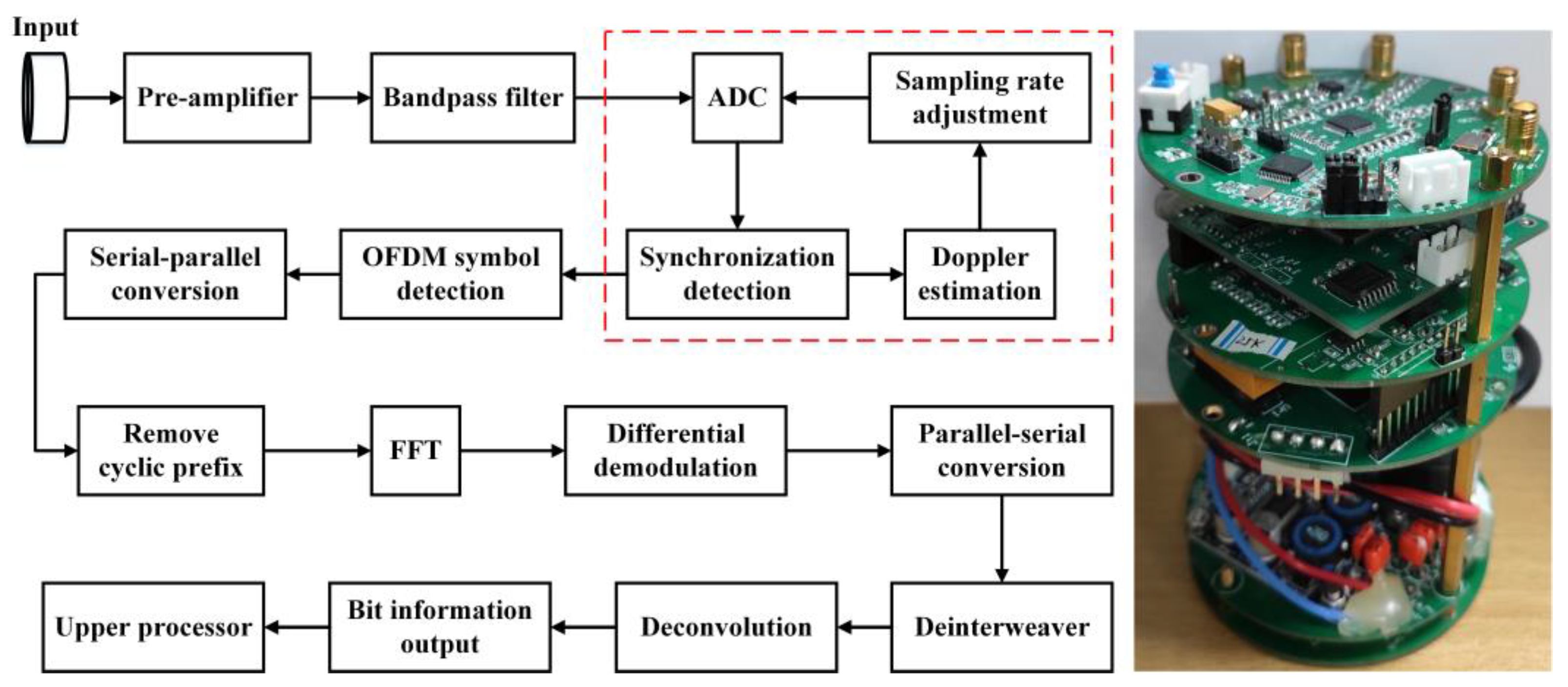
2.3. Doppler Estimation and Compensation Implementation
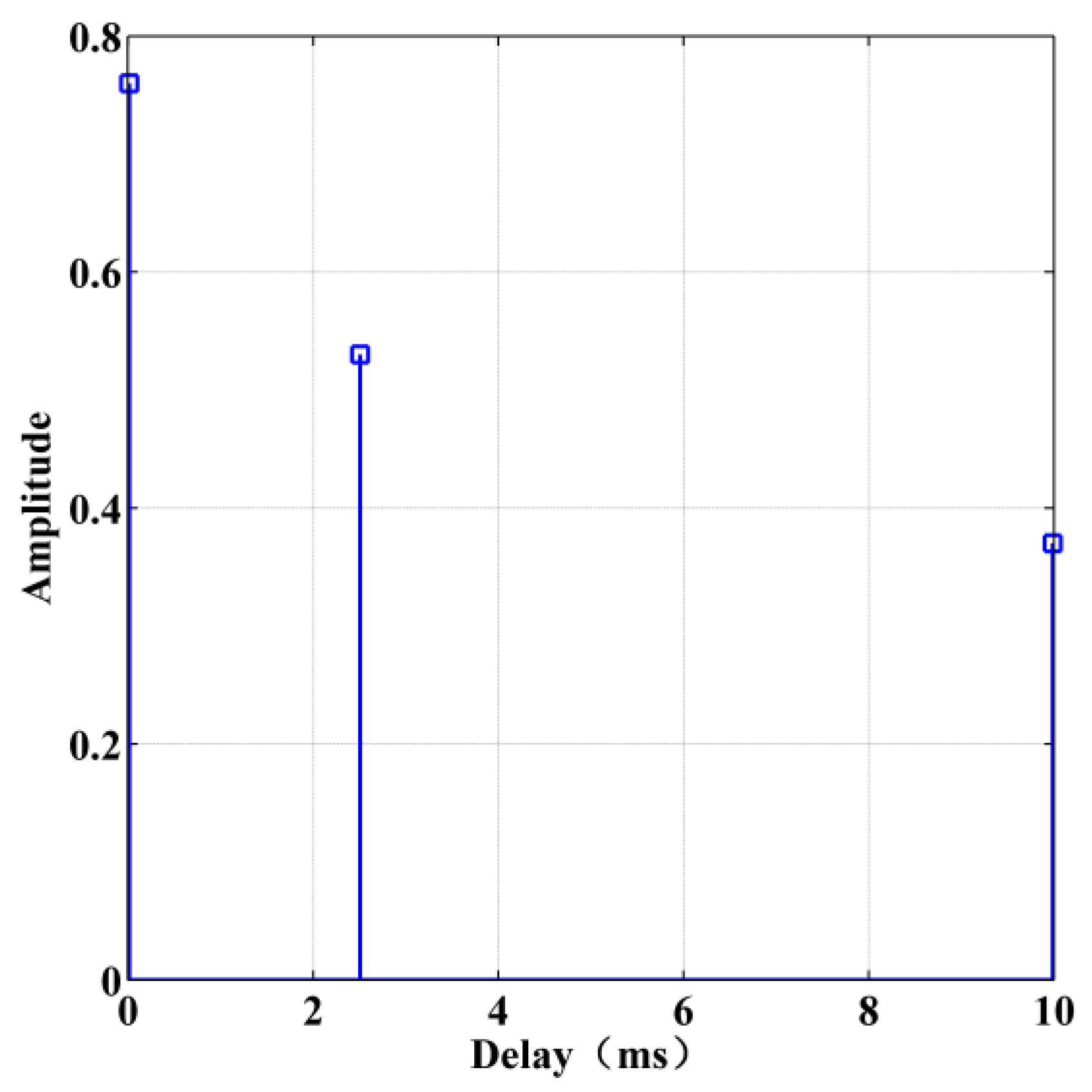
2.3.1. Doppler Estimation Strategy
2.3.2. Conventional Doppler Compensation Method
2.3.3. Agile and Low Computational Overhead Doppler Compensation Approach
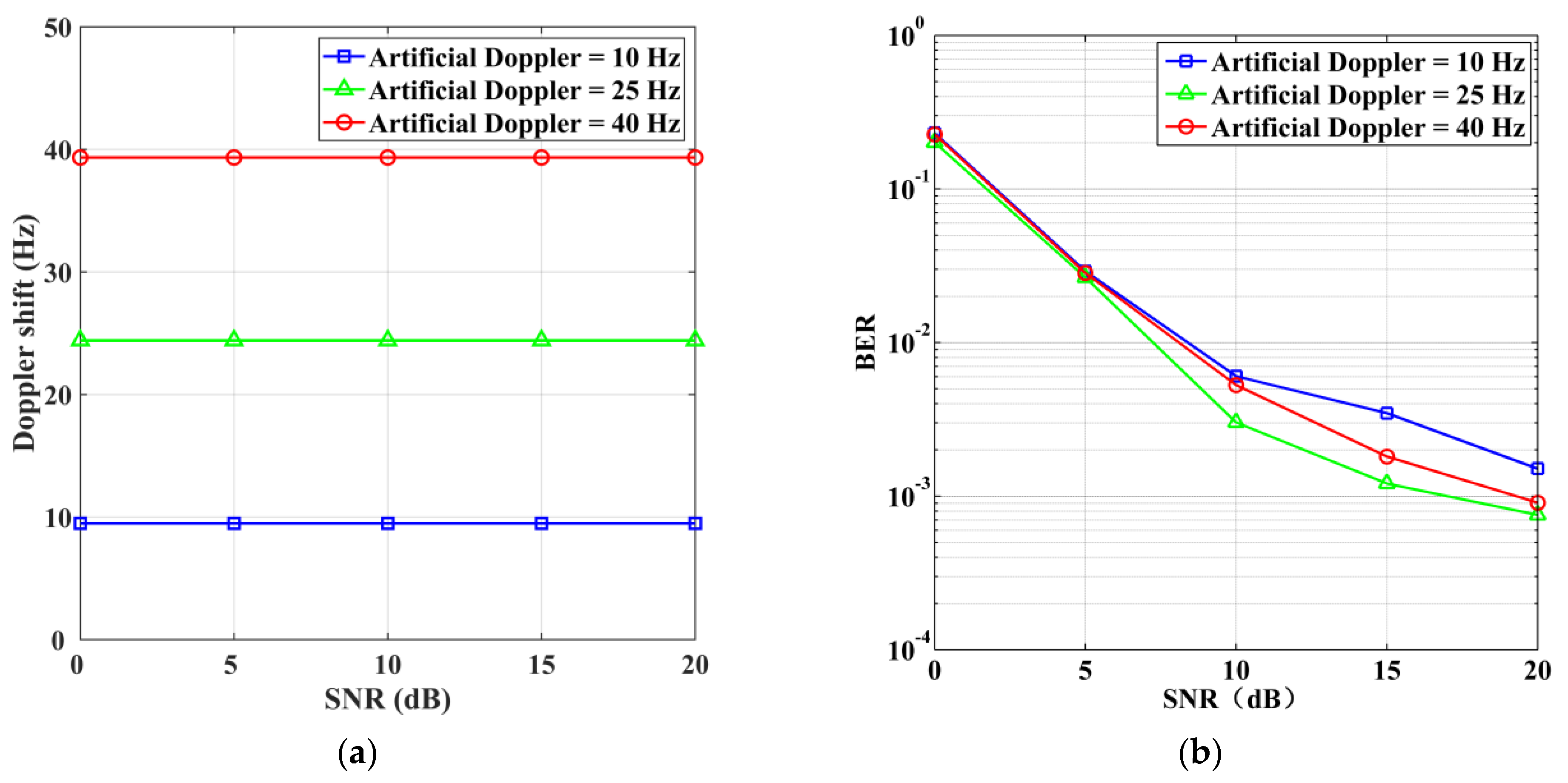
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cypher, A.D.; Statscewich, H.; Campbell, R.; Danielson, S.L.; Eiler, J.; Bishop, M.A. Detection efficiency of an autonomous underwater glider carrying an integrated acoustic receiver for acoustically tagged Pacific herring. ICES J. Mar. Sci. 2023, 80, 329–341. [Google Scholar] [CrossRef]
- Alaaeldeen, M.; Duan, W. Overview on the development of autonomous underwater vehicles (AUVs). J. Ship Mech. 2016, 20, 768–787. [Google Scholar]
- Jiang, W.; Tao, Q.; Yao, J.; Tong, F.; Zhang, F. R&D of a low-complexity OFDM acoustic communication payload for Micro-AUV in confined space. EURASIP J. Adv. Signal Process. 2022, 64, 1–10. [Google Scholar] [CrossRef]
- Jiang, W.; Yang, X.; Tong, F.; Yang, Y.; Zhou, T. A low-complexity underwater acoustic coherent communication system for small AUV. Remote Sens. 2022, 14, 3405. [Google Scholar] [CrossRef]
- Huang, J.; Diamant, R. Adaptive modulation for long-range underwater acoustic communication. IEEE Trans. Wirel. Commun. 2020, 19, 6844–6857. [Google Scholar] [CrossRef]
- Li, J.; Bai, Y.; Zhang, Y.; Qu, F.; Wei, Y.; Wang, J. Cross power spectral density based beamforming for underwater acoustic communications. Ocean Eng. 2020, 216, 107786. [Google Scholar] [CrossRef]
- Cao, X.; Jiang, W.; Tong, F. Time reversal MFSK acoustic communication in underwater channel with large multipath spread. Ocean Eng. 2018, 152, 203–209. [Google Scholar] [CrossRef]
- Jing, L.; Zhang, N.; He, C.; Shang, J.; Liu, X.; Yin, H. OTFS underwater acoustic communications based on passive time reversal. Appl. Acoust. 2022, 185, 108386. [Google Scholar] [CrossRef]
- Fang, T.; Liu, S.; Ma, L.; Zhang, L.; Khan, I.U. Subcarrier modulation identification of underwater acoustic OFDM based on block expectation maximization and likelihood. Appl. Acoust. 2021, 173, 107654. [Google Scholar] [CrossRef]
- Cai, J.; Li, Z.; Hao, Y.; Cai, J. Time-variant Doppler frequency estimation and compensation for mobile OFDM systems. IEEE Trans. Consumer Electron. 2006, 52, 336–340. [Google Scholar] [CrossRef]
- Susaki, H. Method of high-resolution frequency measurement for pulse-Doppler sonar. In Proceedings of the 2002 International Symposium on Underwater Technology, Tokyo, Japan, 19 April 2002; pp. 39–44. [Google Scholar] [CrossRef]
- Zhang, X.; Han, X.; Yin, J.; Sheng, X. Study on Doppler effects estimate in underwater acoustic communication. J. Acoust. Soc. Am. 2013, 19, 070062. [Google Scholar] [CrossRef]
- Aval, Y.M.; Stohanovic, M. Partial FFT demodulation for coherent detection of OFDM signals over underwater acoustic communication. In Proceedings of the IEEE OCEANS, Bergen, Norway, 10–14 June 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Huang, Y.; Li, Y. Inter-carrier interference mitigation for differentially coherent detection in underwater acoustic OFDM system. In Proceedings of the IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Yao, T.; Zhao, W.; Zhang, Q.; Kou, Y. Estimation of Doppler-shift based on correlation-peak waveform. In Proceedings of the International Conference on Communications, Circuits and Systems, Kokura, Japan, 11–13 July 2007; pp. 99–102. [Google Scholar] [CrossRef]
- Li, B.; Tong, F.; Li, J.; Zheng, S. Cross-correlation quasi-gradient Doppler estimation for underwater acoustic OFDM mobile communications. Appl. Acoust. 2022, 190, 108640. [Google Scholar] [CrossRef]
- Zakharov, Y.V.; Morozov, A.K. OFDM transmission without guard interval in fast-varying underwater acoustic channels. IEEE J. Ocean. Eng. 2015, 40, 144–158. [Google Scholar] [CrossRef]
- Kay, S.M.; Doyle, S.B. Rapid estimation of the range-doppler scattering function. IEEE Trans. Signal Process. 2003, 51, 255–268. [Google Scholar] [CrossRef]
- Abdelkareem, A.E.; Sharif, B.S.; Tsimenidis, C.C. Adaptive time varying doppler shift compensation algorithm for OFDM-based underwater acoustic communication systems. Ad Hoc Netw. 2016, 45, 104–119. [Google Scholar] [CrossRef]
- Li, J.; Zakharov, Y.V.; Henson, B. Multibranch autocorrelation method for Doppler estimation in underwater acoustic channels. IEEE J. Ocean. Eng. 2018, 43, 1099–1113. [Google Scholar] [CrossRef]
- Li, B.; Zheng, S.; Tong, F. Bit-error rate based Doppler estimation for shallow water acoustic OFDM communication. Ocean Eng. 2019, 182, 203–210. [Google Scholar] [CrossRef]
- Li, B.; Tong, F.; Zheng, S.; Chen, D. Bit-error rate gradient descent Doppler estimation for underwater acoustic OFDM communication. Appl. Acoust. 2021, 171, 107557. [Google Scholar] [CrossRef]
- Sharif, B.S.; Neasham, J.; Hinton, O.R.; Adams, A.E. A computationally efficient Doppler compensation system for underwater acoustic communications. IEEE J. Ocean. Eng. 2000, 25, 52–61. [Google Scholar] [CrossRef]
- Zheng, S.; Tong, F.; Li, B.; Tao, Q.; Song, A.; Zhang, F. Design and evaluation of an acoustic modem for a small autonomous unmanned vehicle. Sensors 2019, 19, 2923. [Google Scholar] [CrossRef]
- Haas, E.; Kaiser, S. Two-dimensional differential demodulation for OFDM. IEEE Trans. Commun. 2003, 51, 580–586. [Google Scholar] [CrossRef]
- Stojanovic, M. Retrofocusing techniques for high rate acoustic communications. J. Acoust. Soc. Am. 2005, 117, 1173–1185. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Value | Items | Value |
|---|---|---|---|
| Modulation mode | DQPSK | OFDM symbol duration (ms) | 42.67 |
| Center frequency (Hz) | 25,000 | Length of guard interval (ms) | 10.67 |
| Bandwidth (Hz) | 8000 | Length of LFM signal (ms) | 17.71 |
| Sampling rate (Hz) | 96,000 | FFT points | 4096 |
| Number of sub-carriers | 340 | Number of OFDM symbol | 40 |
| Interval of sub-carrier (Hz) | 23.44 | Original communication rate (kbps) | 6.38 |
| Length of OFDM data frame (ms) | 2133.33 | Effective communication rate(kbps) | 3.19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Tong, F.; Gao, X.; Yao, J.; Zhou, Y.; Huang, H. R&D of an Innovative OFDM Communication Payload for Small-Size AUV. J. Mar. Sci. Eng. 2023, 11, 1029. https://doi.org/10.3390/jmse11051029
Li B, Tong F, Gao X, Yao J, Zhou Y, Huang H. R&D of an Innovative OFDM Communication Payload for Small-Size AUV. Journal of Marine Science and Engineering. 2023; 11(5):1029. https://doi.org/10.3390/jmse11051029
Chicago/Turabian StyleLi, Bin, Feng Tong, Xiujing Gao, Junhui Yao, Yuehai Zhou, and Hongwu Huang. 2023. "R&D of an Innovative OFDM Communication Payload for Small-Size AUV" Journal of Marine Science and Engineering 11, no. 5: 1029. https://doi.org/10.3390/jmse11051029