
Output Feedback Tracking Control with Collision Avoidance for Dynamic Positioning Vessel under Input Constraint


Abstract
:1. Introduction
2. Problem Formulation
3. Collision Avoidance Strategy
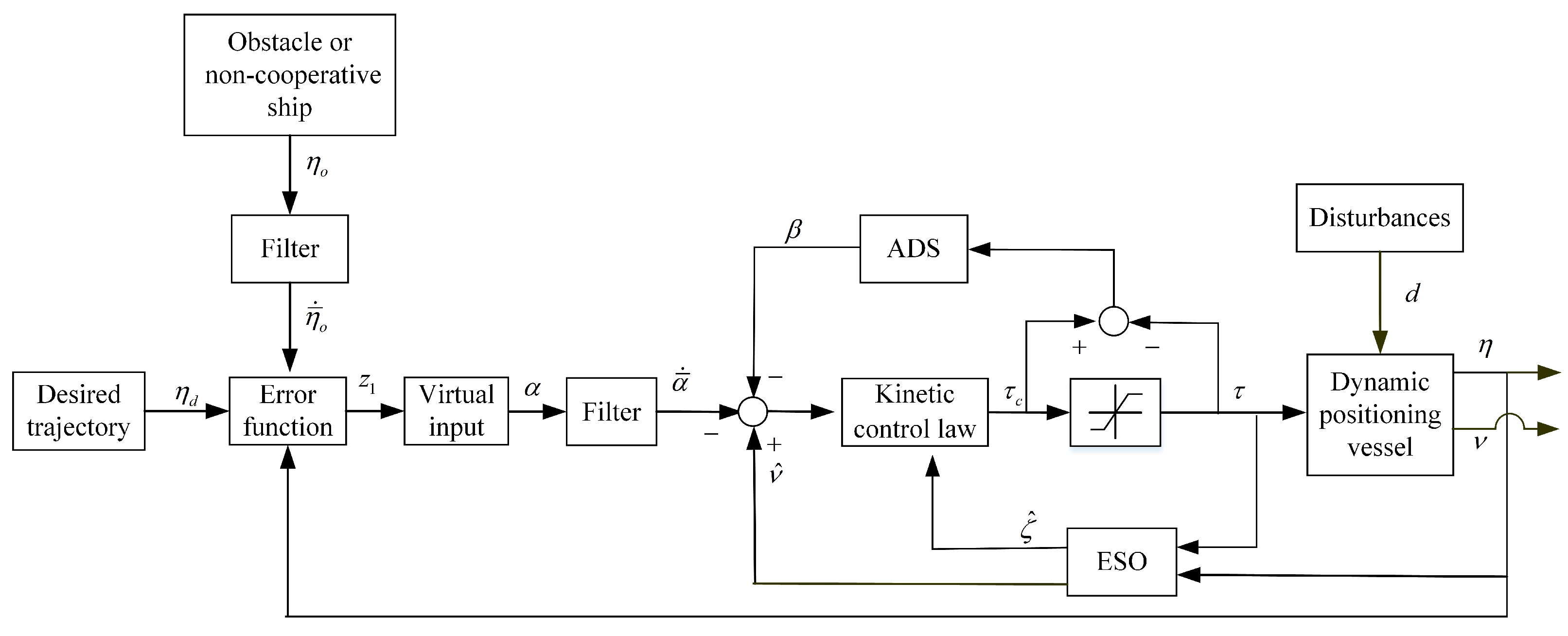
4. Observer Design
5. Controller Design
6. Simulation Results
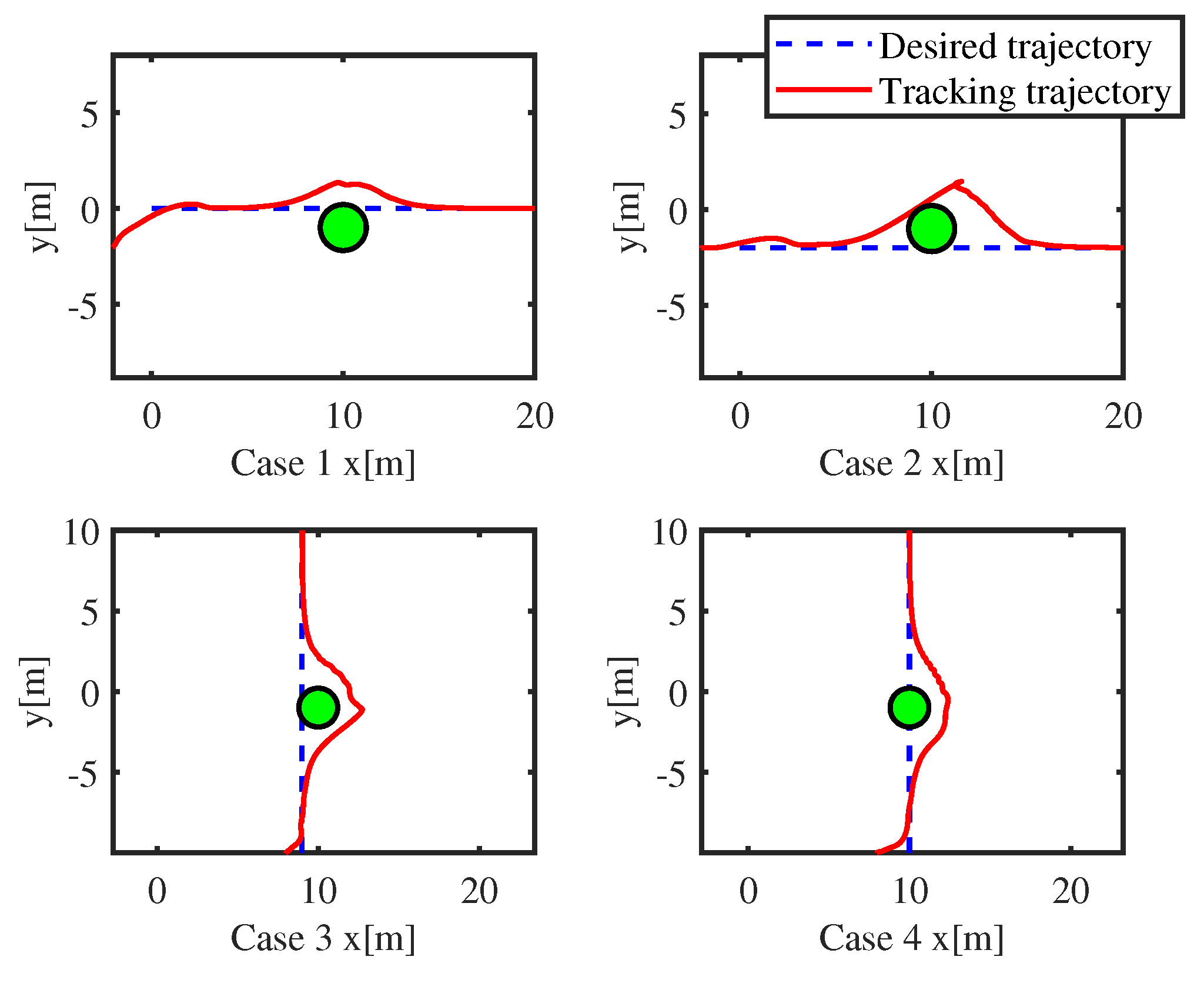
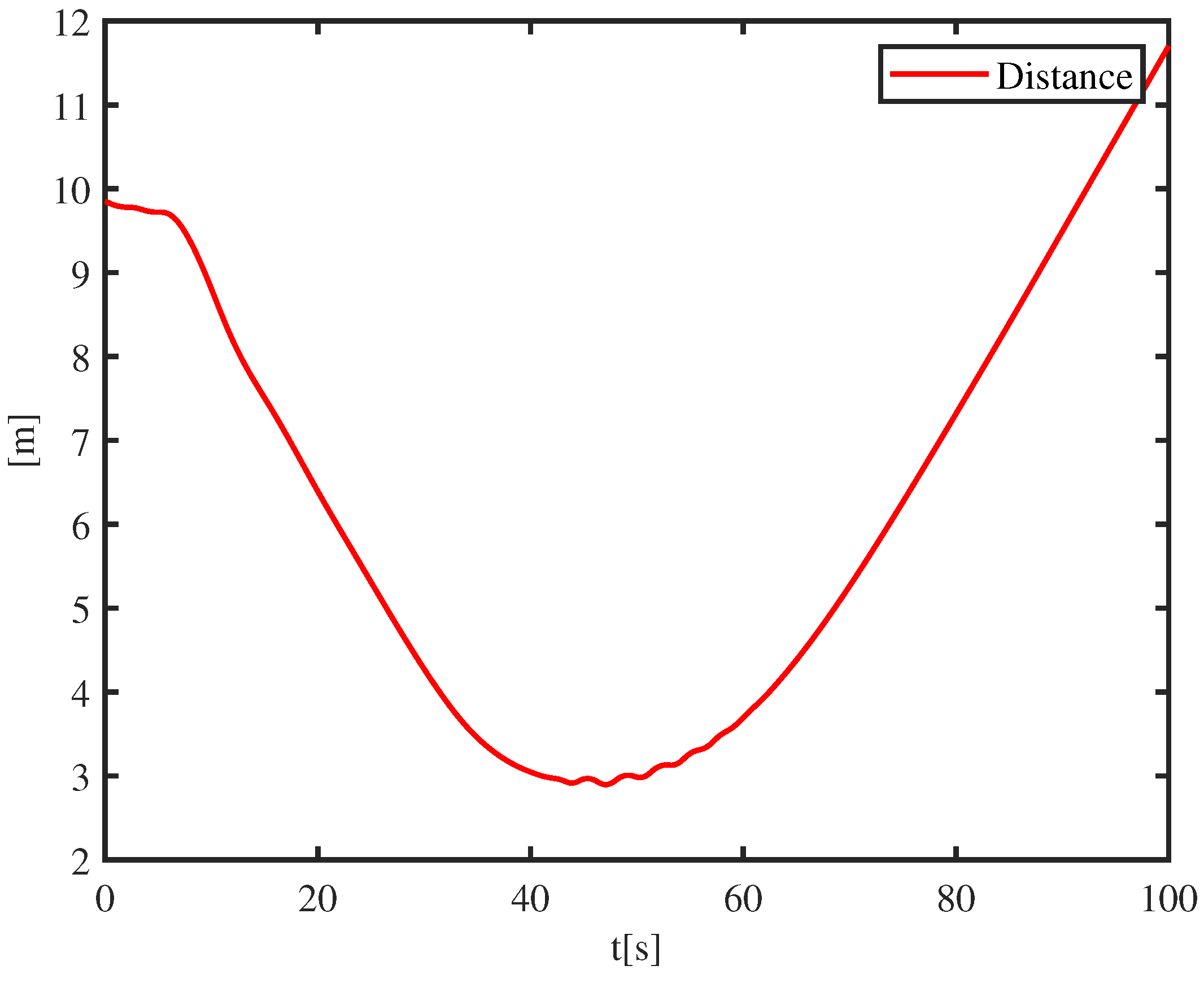
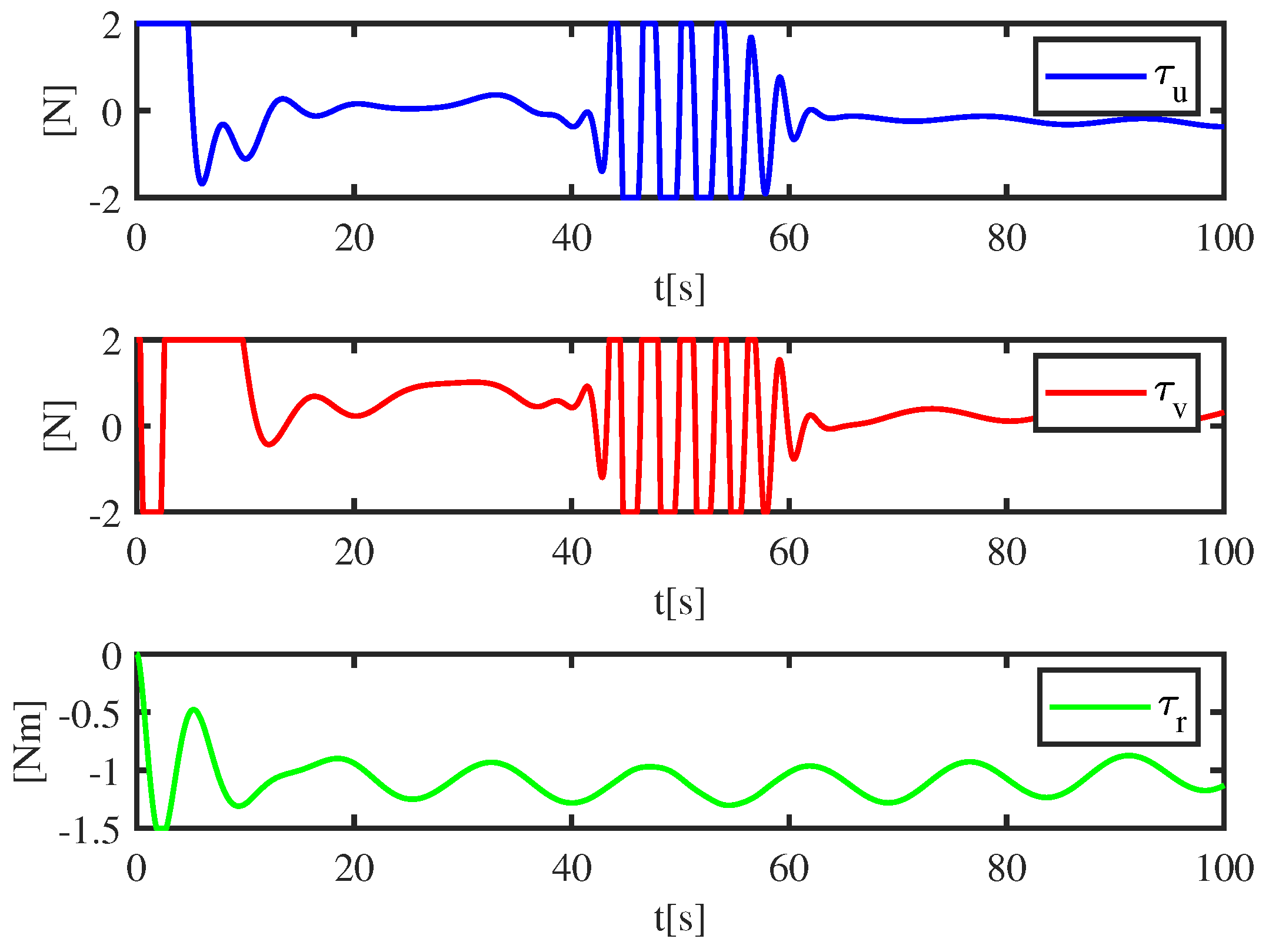
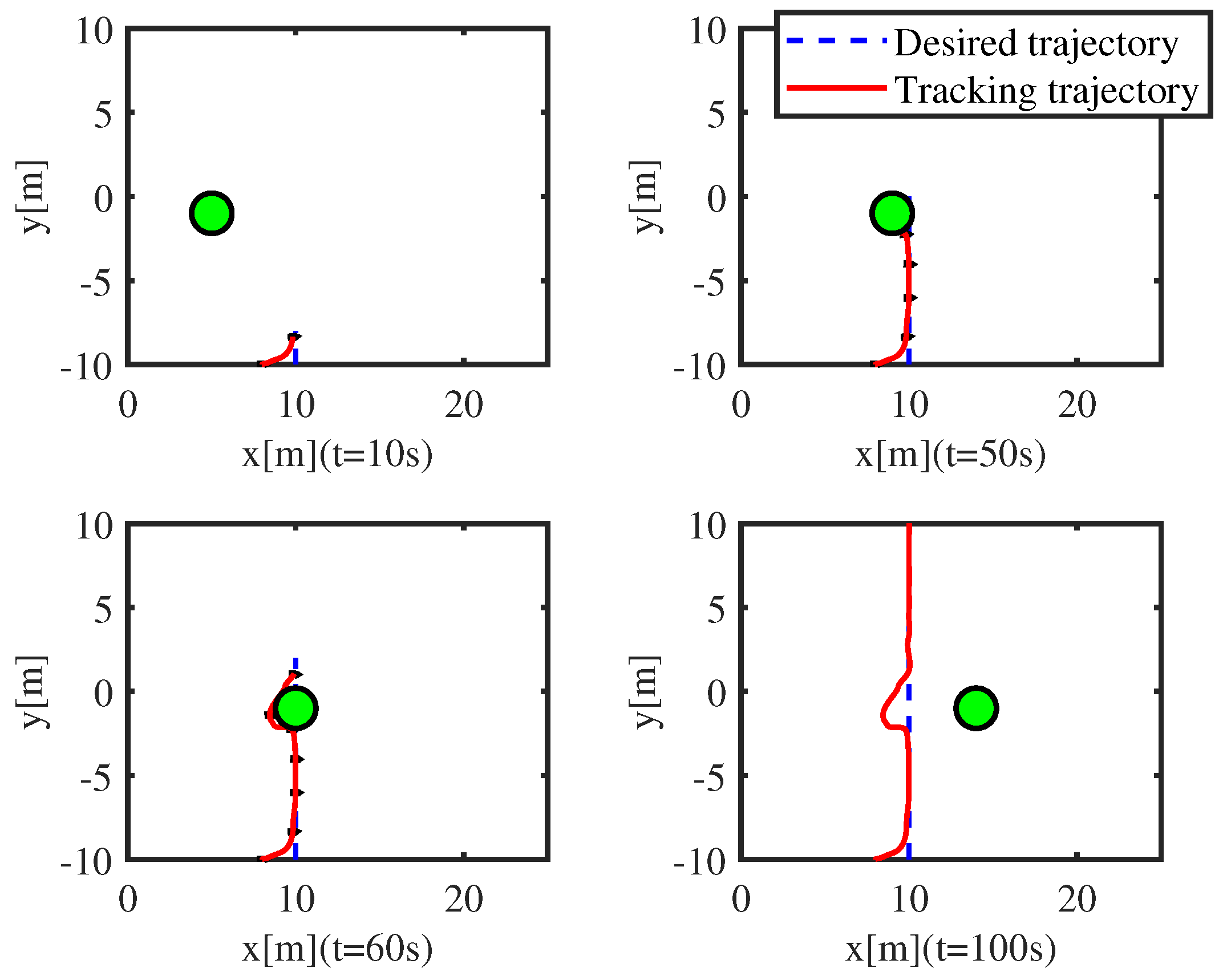
6.1. Trajectory Tracking Control with Obstacle Avoidance
6.2. Trajectory Tracking Control with Non-Cooperative Ship
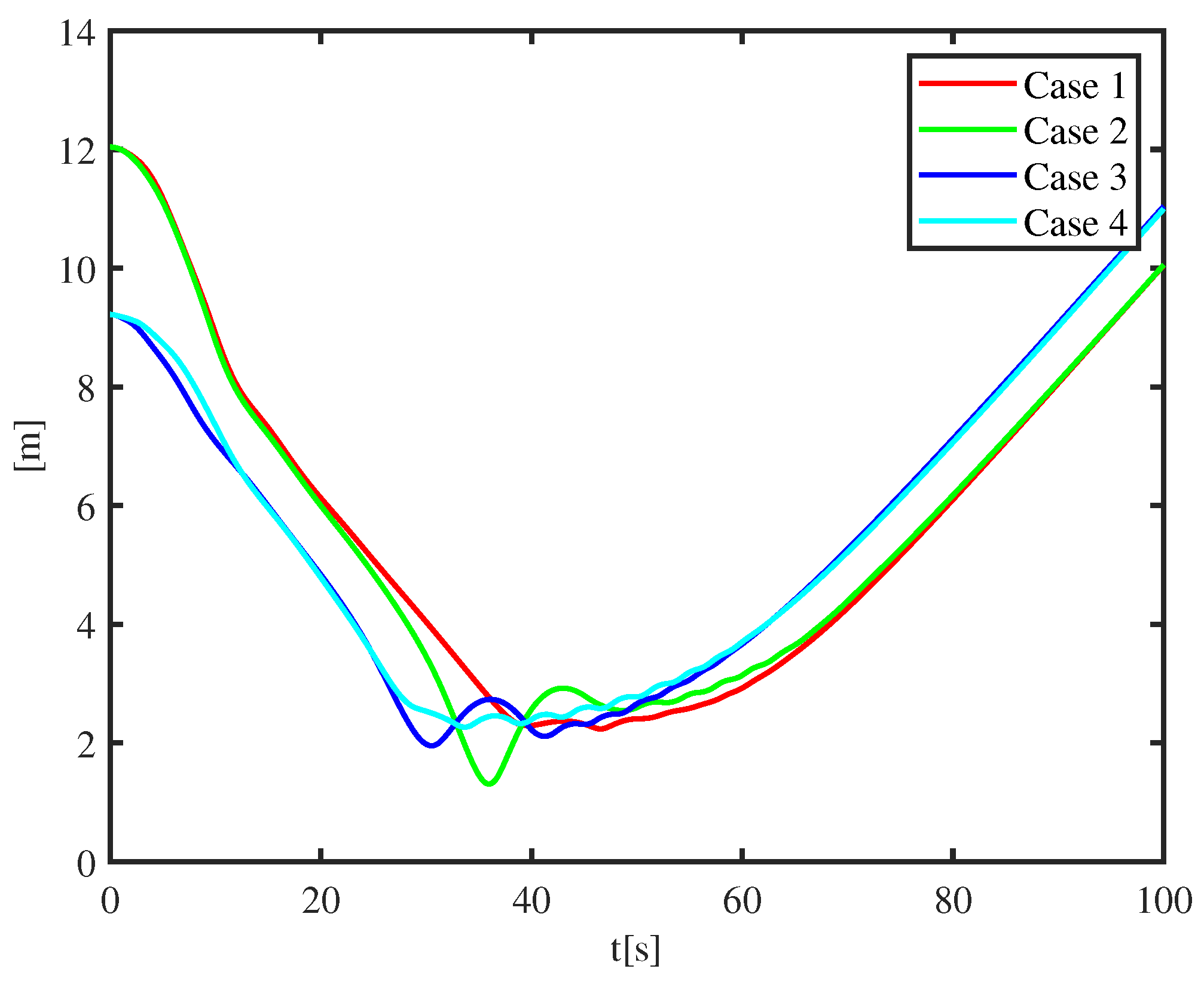
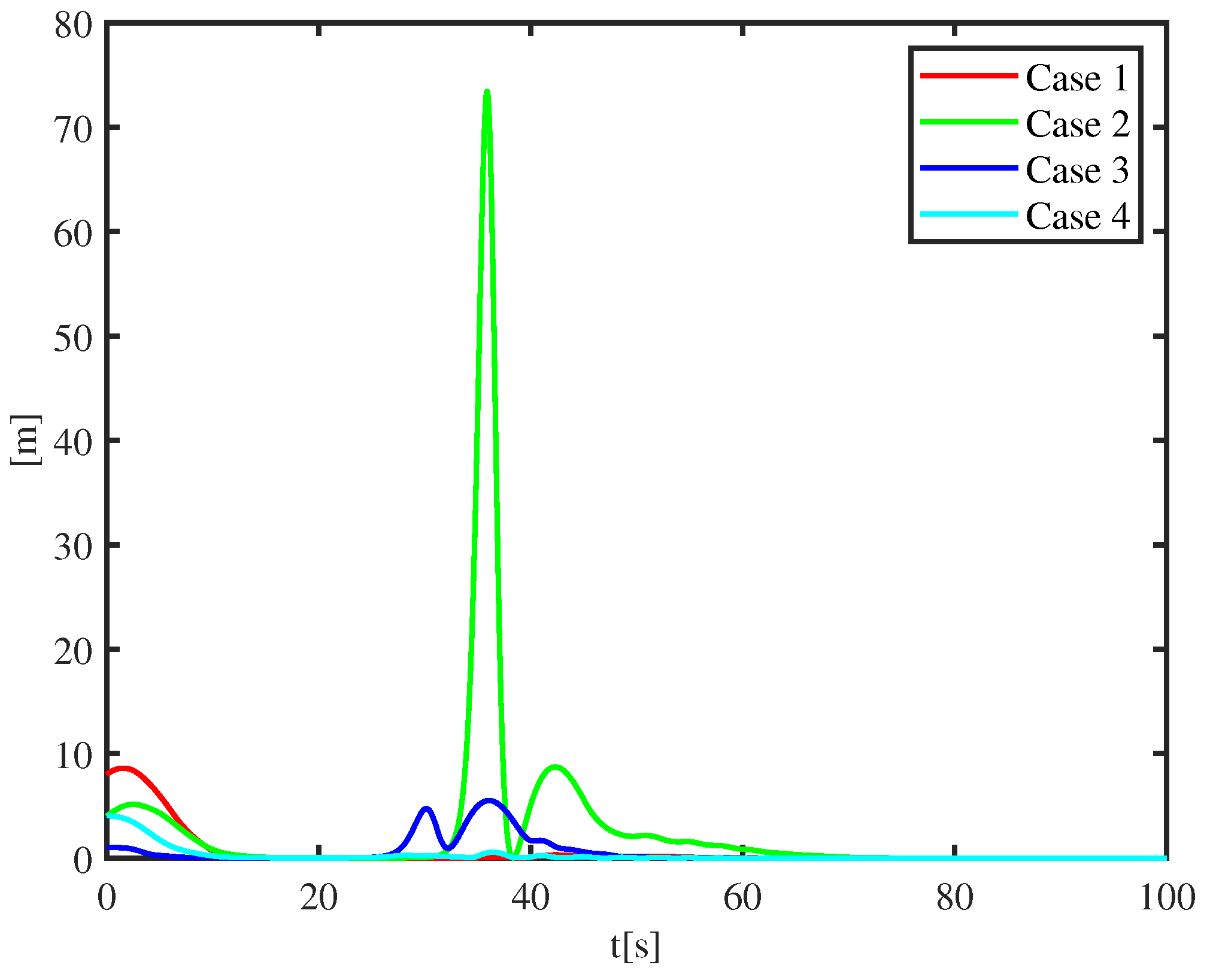
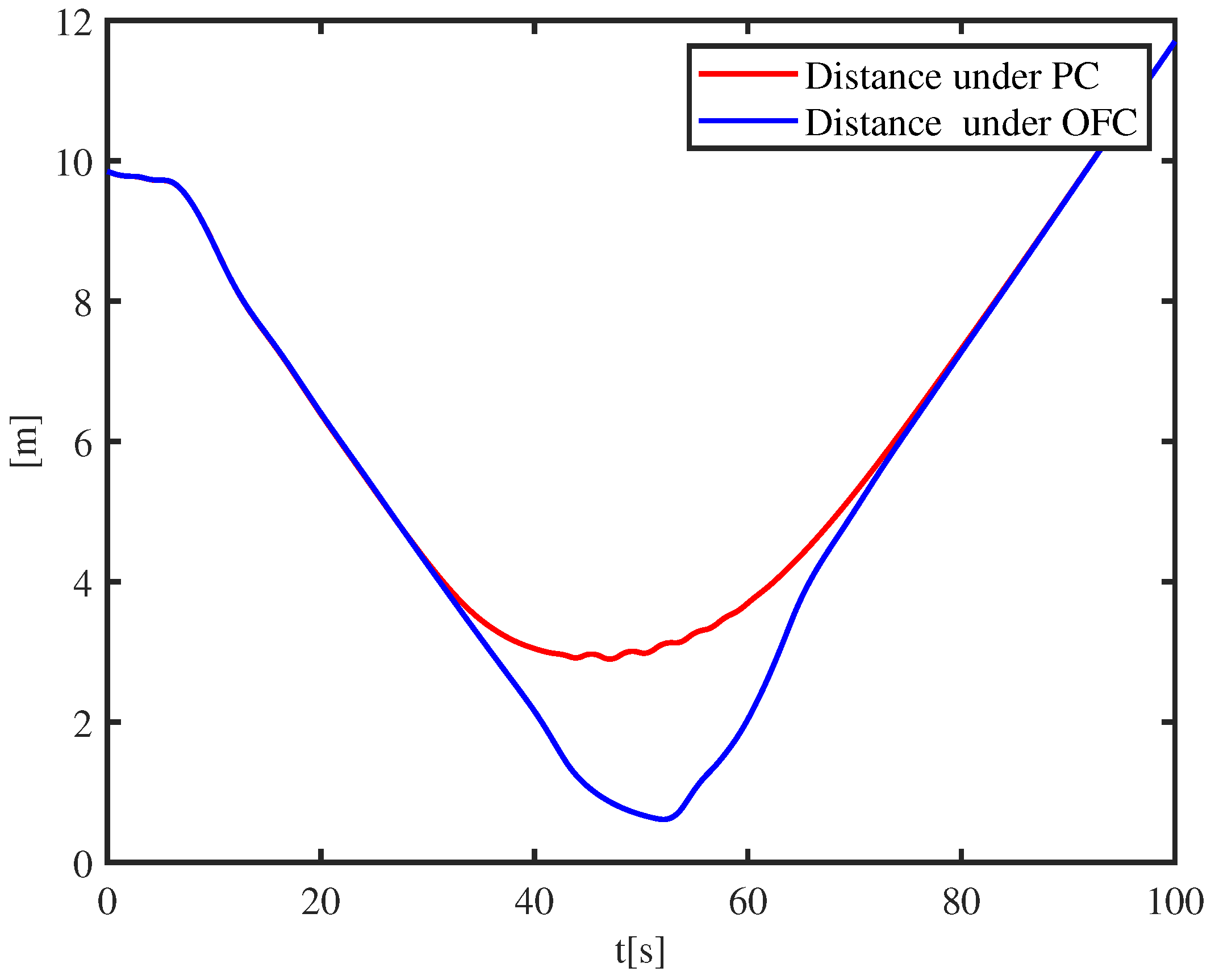
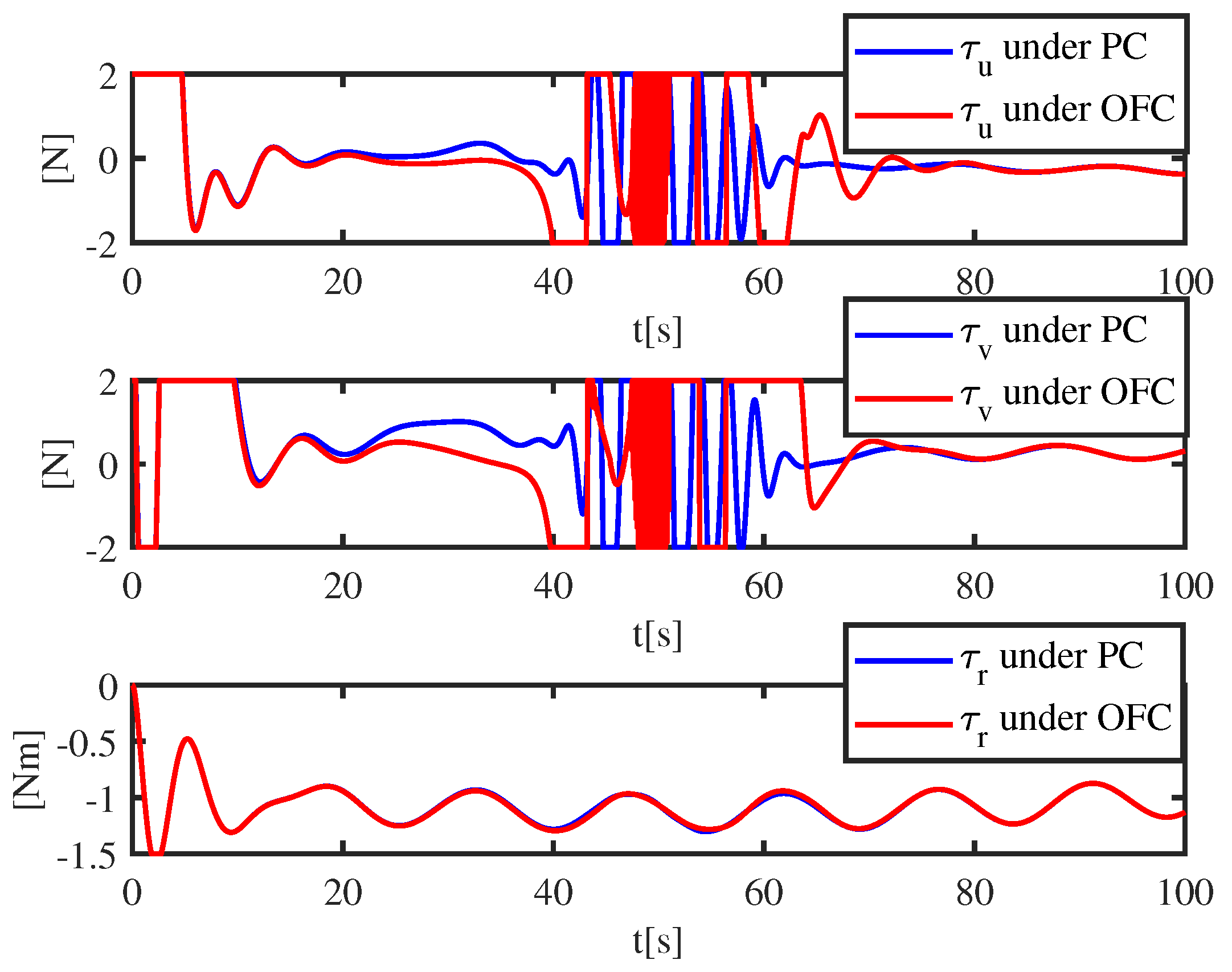
6.3. Comparison Study
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dai, S.L.; Wang, M.; Wang, C. Neural learning control of marine dynamic positioning vessels with guaranteed transient tracking performance. IEEE Trans. Ind. Electron. 2016, 63, 1717–1727. [Google Scholar] [CrossRef]
- Gao, S.; Liu, C.; Tuo, Y.; Chen, K.; Zhang, T. Augmented model-based dynamic positioning predictive control for underactuated unmanned surface vessels with dual propellers. Ocean Eng. 2022, 266, 112885. [Google Scholar] [CrossRef]
- Sørensen, A.J. A survey of dynamic positioning control systems. Annu. Rev. Control. 2011, 35, 123–136. [Google Scholar] [CrossRef]
- Xia, G.Q.; Zhang, B.W. Finite-Time Control of Dynamic Positioning Vessel Based on Disturbance Observer. Math. Probl. Eng. 2022, 2022, 9262457. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Wu, H.T.; Liu, W.X. Effects of mooring line hydrodynamic coefficients and wave parameters on the floating production storage and offloading motions. Desalin. Water Treat. 2021, 239, 278–288. [Google Scholar] [CrossRef]
- Liu, X.; Miao, Q.; Wang, X.; Xu, S.; Fan, H. A novel numerical method for the hydrodynamic analysis of floating bodies over a sloping bottom. J. Mar. Sci. Technol. 2021, 26, 1198–1216. [Google Scholar] [CrossRef]
- Fan, H.Q.; Miao, Q.M.; Allan, R.M. Wave Loads on the Large Vertical Cylinder with the Conformal Mapping and Series Expansion Method. In Proceedings of the Fourteenth (2020) ISOPE Pacific-Asia Offshore Mechanics Symposium, Dalian, China, 22–25 November 2020. [Google Scholar]
- Van, M.; Do, V.T.; Khyam, M.O.; Xuan, P.D. Tracking control of uncertain dynamic positioning vessels with global finite-time convergence. J. Adv. Res. 2021, 241, 109974. [Google Scholar]
- Zhu, Y.; Zhang, H.; Li, H.; Zhang, J.; Zhang, D. Optimal Jamming Strategy Against Two-state Switched System. IEEE Commun. Lett. 2022, 13, 1767–1775. [Google Scholar] [CrossRef]
- Gao, S.; Xue, J.J. Nonlinear vector model control of underactuated air cushion vehicle based on parameter reduction algorithm. Trans. Inst. Meas. Control. 2021, 43, 1202–1211. [Google Scholar] [CrossRef]
- Li, H.; Xu, W.; Zhang, H.; Zhang, J.; Liu, Y. Polynomial regressors based data-driven control for autonomous underwater vehicles. Peer-to-Peer Netw. Appl. 2020, 13, 1767–1775. [Google Scholar] [CrossRef]
- Fang, M.C.; Zhuo, Y.Z.; Lee, Z.Y. The application of the self-tuning neural network PID controller on the ship roll reduction in random waves. Ocean. Eng. 2010, 37, 529–538. [Google Scholar] [CrossRef]
- Larrazabal, J.M.; Penas, M.S. Intelligent rudder control of an unmanned surface vessel. Expert Syst. Appl. 2016, 55, 106–117. [Google Scholar] [CrossRef]
- Ishaque, K.; Abdullah, S.; Ayob, S.; Salam, Z. A simplified approach to design fuzzy logic controller for an underwater vehicle. Ocean Eng. 2011, 38, 271–284. [Google Scholar] [CrossRef]
- Abdelaal, M.; Fränzle, M.; Hahn, A. Nonlinear model predictive control for trajectory tracking and collision avoidance of underactuated vessels with disturbances. Ocean Eng. 2018, 160, 168–180. [Google Scholar] [CrossRef]
- Ashrafiuon, H.; Muske, K.; McNinch, L. Sliding-mode tracking control of dynamic positioning vessels. IEEE Trans. Ind. Electron. 2008, 55, 4004–4012. [Google Scholar] [CrossRef]
- Xia, G.; Xia, X.; Zhao, B.; Sun, C.; Sun, X. A solution to leader following of underactuated dynamic positioning vessel s with actuator magnitude and rate limits. Int. J. Adapt. Control. Signal Process. 2021, 35, 1860–1878. [Google Scholar] [CrossRef]
- Xia, G.Q.; Xia, X.M.; Sun, X.X. Formation tracking control for underactuated surface vehicles with actuator magnitude and rate saturations. Ocean Eng. 2022, 260, 111935. [Google Scholar] [CrossRef]
- Zhu, H.; Yu, H.M.; Guo, C. Finite time PAILOS based path following control of underactuated marine surface vessel with input saturation. ISA Trans. 2022, 135, 66–77. [Google Scholar] [CrossRef]
- Xia, G.; Xia, X.; Bo, Z.; Sun, X.; Sun, C. Event-Triggered Controller Design for Autopilot with Input Saturation. Math. Probl. Eng. 2020, 2020, 5362895. [Google Scholar] [CrossRef]
- Zhu, G.; Du, J. Global Robust Adaptive Trajectory Tracking Control for dynamic positioning ships Under Input Saturation. IEEE J. Ocean. Eng. 2020, 45, 442–450. [Google Scholar] [CrossRef]
- Qin, H.; Li, C.; Sun, Y.; Li, X.; Du, Y.; Deng, Z. Finite-time trajectory tracking control of unmanned surface vessel with error constraints and input saturations. J. Frankl. Inst. 2020, 357, 11472–11495. [Google Scholar] [CrossRef]
- Qin, H.; Li, C.; Sun, Y.; Wang, N. Adaptive trajectory tracking algorithm of unmanned dynamic positioning vessel based on anti-windup compensator with full-state constraints. Ocean Eng. 2020, 200, 106906. [Google Scholar] [CrossRef]
- Xia, G.; Xia, X.; Zhao, B.; Sun, C.; Sun, X. Distributed Tracking Control for Connectivity-Preserving and Collision-Avoiding Formation Tracking of Underactuated Surface Vessels with Input Saturation. Appl. Sci. 2020, 10, 3372. [Google Scholar] [CrossRef]
- Zeng, Z.; Yu, H.; Guo, C.; Yan, Z. Finite-time coordinated formation control of discrete-time multi-AUV with input saturation under alterable weighted topology and time-varying delay. Ocean Eng. 2022, 266, 112881. [Google Scholar] [CrossRef]
- Tam, C.K.; Bucknall, R. Cooperative path-planning algorithm for marine dynamic positioning vessels. Ocean Eng. 2013, 57, 25–33. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, J. Real-time collision avoidance planning for unmanned surface vessels based on field theory. ISA Trans. 2020, 106, 233–242. [Google Scholar] [CrossRef]
- Wang, W.M.; Du, J.L.; Tao, Y.H. A dynamic collision avoidance solution scheme of unmanned surface vessels based on proactive velocity obstacle and set-based guidance. Ocean Eng. 2022, 248, 110794. [Google Scholar]
- Park, J.W. Improved Collision Avoidance Method for Autonomous Surface Vessels Based on Model Predictive Control Using Particle Swarm Optimization. Int. J. Fuzzy Log. Intell. Syst. 2021, 21, 378–390. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, D.; Li, T.; Han, M. Output-Feedback Cooperative Formation Maneuvering of Autonomous Surface Vehicles With Connectivity Preservation and Collision Avoidance. IEEE Trans. Cybern. 2020, 50, 2527–2535. [Google Scholar] [CrossRef]
- Park, B.S.; Yoo, S.J. An error transformation approach for connectivity-preserving and collision-avoiding formation tracking of networked uncertain underactuated dynamic positioning vessels. IEEE Trans. Cybern. 2019, 49, 353–359. [Google Scholar] [CrossRef]
- Fossen, T.I.; Strand, J.P. Passive nonlinear observer design for ships using Lyapunov methods: Full-Scale experiments with a supply vessel. Automatica 1999, 35, 3–16. [Google Scholar] [CrossRef]
- Liang, X.; Qu, X.; Wang, N.; Li, Y.; Zhang, R. Swarm control with collision avoidance for multiple underactuated surface vehicles. Ocean Eng. 2019, 191, 106516. [Google Scholar] [CrossRef]
- Xia, G.Q.; Xia, X.M.; Sun, X.X. Formation control with collision avoidance for underactuated surface vehicles. Asian J. Control. 2022, 24, 2244–2257. [Google Scholar] [CrossRef]
- Kowalczyk, W.; Michaek, M.; Kozowski, K. Trajectory tracking control and obstacle avoidance for a differentially driven mobile robot. IFAC-World Congr. 2011, 41, 1058–1063. [Google Scholar] [CrossRef]
- Xia, G.; Sun, C.; Zhao, B.; Xia, X.; Sun, X. Neuroadaptive Distributed Output Feedback Tracking Control for Multiple Marine Surface Vessels With Input and Output Constraints. IEEE Access 2019, 7, 123076–123085. [Google Scholar] [CrossRef]
- Kowalczyk, W.; Michaek, M.; Kozowski, K. Collaborative collision avoidance for Maritime Autonomous dynamic positioning ships: A review. IFAC-World Congr. 2011, 41, 1058–1063. [Google Scholar]
- Skjetne, R.; Fossen, T.I.; Kokotovi, P.V. Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica 2005, 41, 289–298. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Scenario | |||
|---|---|---|---|
| Case 1 | m, m, 0 rad | m/s, 0 m/s, 0 rad/s | m, m |
| Case 2 | m, m, 0 rad | m/s, 0 m/s, 0 rad/s | m, m |
| Case 3 | m, m, 0 rad | m/s, m/s, 0 rad/s | m, m |
| Case 4 | m, m, 0 rad | m/s, m/s, 0 rad/s | m, m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Xia, G. Output Feedback Tracking Control with Collision Avoidance for Dynamic Positioning Vessel under Input Constraint. J. Mar. Sci. Eng. 2023, 11, 811. https://doi.org/10.3390/jmse11040811
Zhang B, Xia G. Output Feedback Tracking Control with Collision Avoidance for Dynamic Positioning Vessel under Input Constraint. Journal of Marine Science and Engineering. 2023; 11(4):811. https://doi.org/10.3390/jmse11040811
Chicago/Turabian StyleZhang, Benwei, and Guoqing Xia. 2023. "Output Feedback Tracking Control with Collision Avoidance for Dynamic Positioning Vessel under Input Constraint" Journal of Marine Science and Engineering 11, no. 4: 811. https://doi.org/10.3390/jmse11040811