
An Origami Flexiball-Inspired Soft Robotic Jellyfish



Abstract
:1. Introduction
2. Related Works
3. Hydrodynamic Performance of Origami Flexiball Variants
3.1. Origami Flexiball Variants
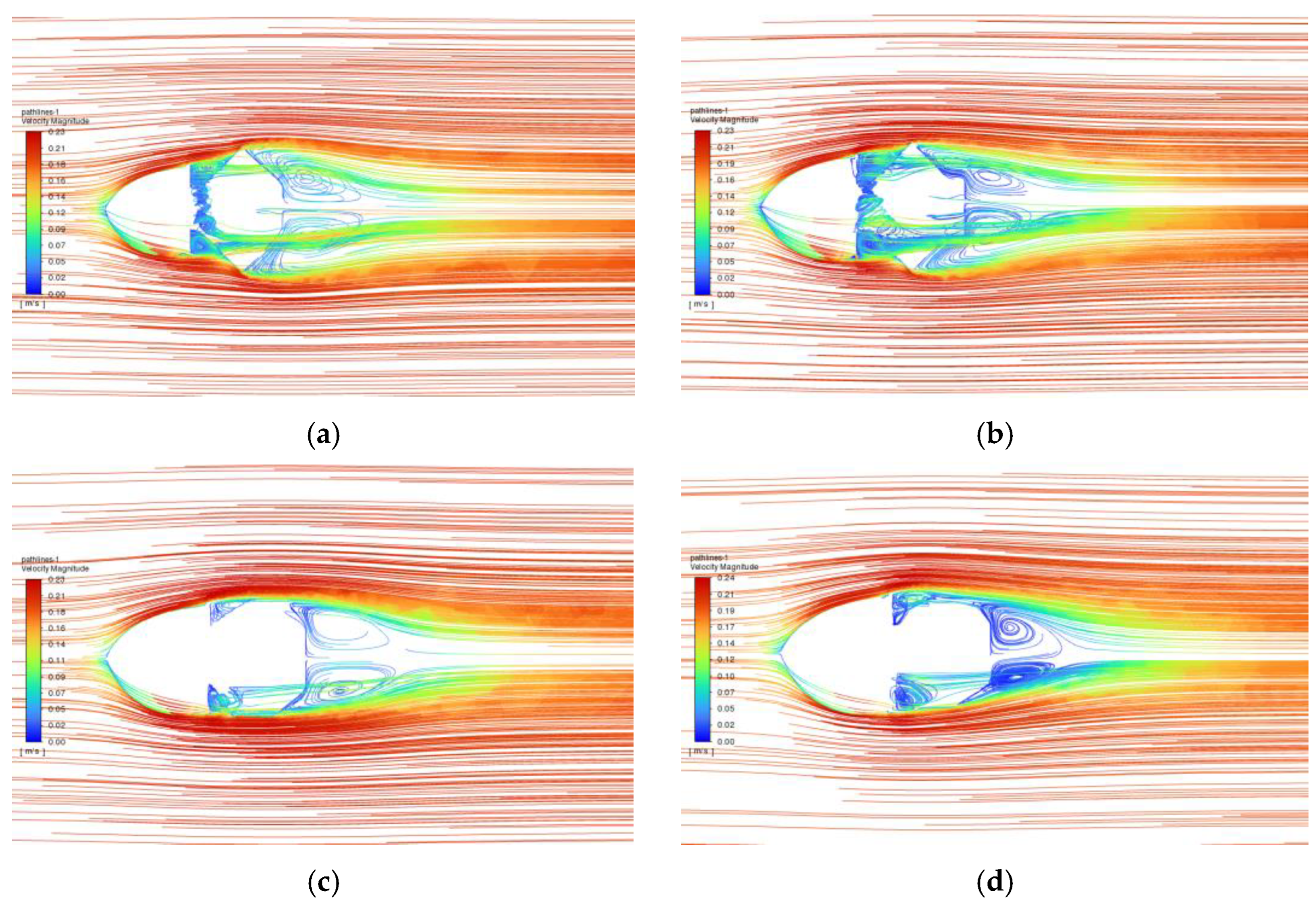
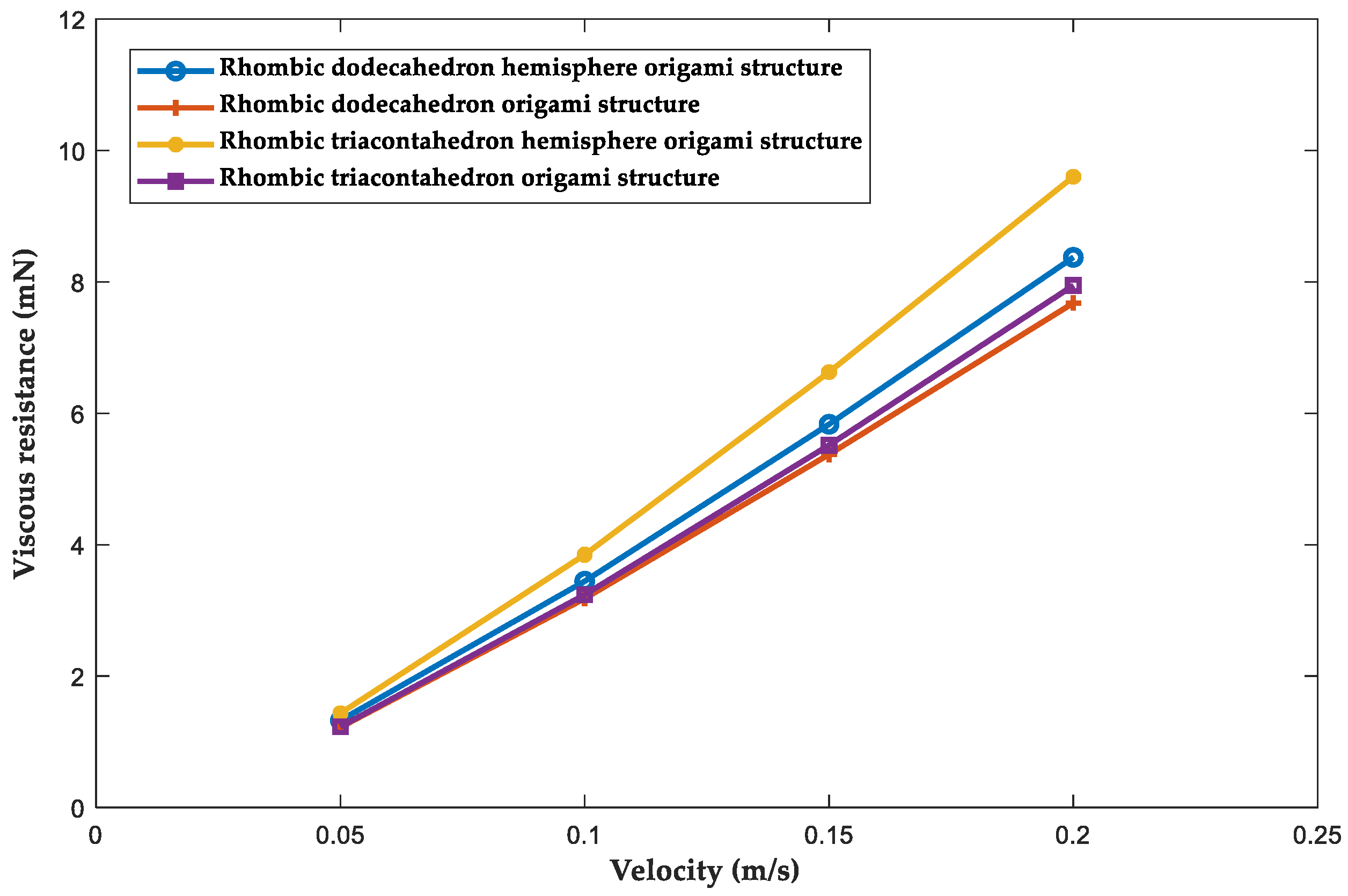
3.2. Resistance Analysis
3.3. Lift Analysis
3.4. Model Selection
4. Jet Propulsion Performance
4.1. Jet Propulsion Modelling
4.2. Jet Propulsion Simulation
5. Prototype of Robotic Jellyfish
5.1. Overall Structure
5.2. Prototype
5.3. Control Method
6. Experiments
6.1. Experimental Platform
6.2. Measurement of Propulsive Force
6.3. Jet Swimming
6.4. Strouhal Number
6.5. Cost of Transport
7. Prospective Directions
7.1. Maneuverability
7.2. Perception
7.3. Structure Improvement
8. Conclusions
- Easy-to-manufacture. The 3D printing method with the accessible soft elastic materials enables the robotic jellyfish to be fabricated rapidly and at low cost;
- Structural simplicity. The overall structure has no complex parts, and no complicated assembly or die preparation is required;
- Good scalability. The geometric dimensions and the structural elasticity are programmable, and the rope-motor-driving method also has good adaptability to the variants.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| ALL | Artificial Lateral Line |
| BCF | Body and/or Caudal Fin |
| COT | Cost of Transport |
| DEA | Dielectric Elastomer Actuators |
| DIP | Direct Inkjet Printing |
| EAP | Electroactive Polymer |
| FDM | Fused Deposition Modeling |
| FEA | Fluid Elastomer Actuator |
| LES | Large Eddy Simulation |
| MPF | Median and/or Paired Fin |
| PLA | Polylactic Acid |
| PZT | Piezoelectric Actuators |
| SLA | Stereo Lithography Apparatus |
| SMA | Shape-Memory Alloy |
| TPU | Thermoplastic Polyurethanes |
References
- Hu, F.; Wang, W.; Cheng, J.; Bao, Y. Origami spring–inspired metamaterials and robots: An attempt at fully programmable robotics. Sci. Prog. 2020, 103, 0036850420946162. [Google Scholar] [CrossRef]
- Hu, F.; Cheng, J.; He, Y. Interactive design for additive manufacturing: A creative case of synchronous belt drive. Int. J. Interact. Des. Manuf. (IJIDeM) 2018, 12, 889–901. [Google Scholar]
- Rafsanjani, A.; Zhang, Y.; Liu, B.; Rubinstein, S.M.; Bertoldi, K. Kirigami skins make a simple soft actuator crawl. Sci. Robot. 2018, 3, eaar7555. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, Y.; Lee, Y.; Cha, Y. Origami pump actuator based pneumatic quadruped robot (OPARO). IEEE Access 2021, 9, 41010–41018. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, D.; Levine, D.J.; Sung, C. Origami-inspired robot that swims via jet propulsion. IEEE Robot. Autom. Lett. 2021, 6, 7145–7152. [Google Scholar] [CrossRef]
- Lee, D.Y.; Kim, S.R.; Kim, J.S.; Park, J.J.; Cho, K.J. Origami wheel transformer: A variable-diameter wheel drive robot using an origami structure. Soft Robot. 2017, 4, 163–180. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Tighe, B.; Zhao, J. Origami-Inspired Modules Enable A Reconfigurable Robot with Programmable Shapes and Motions. IEEE/ASME Trans. Mechatron. 2022, 27, 2016–2025. [Google Scholar] [CrossRef]
- Hu, F.; Li, T. An origami flexiball-inspired metamaterial actuator and its in-pipe robot prototype. Actuators 2021, 10, 67. [Google Scholar] [CrossRef]
- Blasiak, R.; Jouffray, J.B.; Amon, D.J.; Moberg, F.; Claudet, J.; Jørgensen, P.S.; Pranindita, A.; Wabnitz, C.C.C.; Österblom, H. A forgotten element of the blue economy: Marine biomimetics and inspiration from the deep sea. PNAS Nexus 2022, 1, pgac196. [Google Scholar] [CrossRef]
- Colin, S.P.; Costello, J.H.; Dabiri, J.O.; Villanueva, A.; Blottman, J.B.; Gemmell, B.J.; Priya, S. Biomimetic and live medusae reveal the mechanistic advantages of a flexible bell margin. PLoS ONE 2012, 7, e48909. [Google Scholar] [CrossRef] [Green Version]
- Colin, S.P.; Costello, J.H. Morphology, swimming performance and propulsive mode of six co-occurring hydromedusae. J. Exp. Biol. 2002, 205, 427–437. [Google Scholar] [CrossRef]
- Zuo, W.; Dhal, K.; Keow, A.; Chakravarthy, A.; Chen, Z. Model-based control of a robotic fish to enable 3d maneuvering through a moving orifice. IEEE Robot. Autom. Lett. 2020, 5, 4719–4726. [Google Scholar] [CrossRef]
- Ford, M.D.; Costello, J.H. Kinematic comparison of bell contraction by four species of hydromedusae. Sci. Mar. 2000, 64, 47–53. [Google Scholar]
- Chen, F.; Wang, M.Y. Design optimization of soft robots: A review of the state of the art. IEEE Robot. Autom. Mag. 2020, 27, 27–43. [Google Scholar] [CrossRef]
- Ulloa, C.C.; Terrile, S.; Barrientos, A. Soft underwater robot actuated by shape-memory alloys “Jellyrobcib” for path tracking through fuzzy visual control. Appl. Sci. 2020, 10, 7160. [Google Scholar] [CrossRef]
- Almubarak, Y.; Punnoose, M.; Maly, N.X.; Hamidi, A.; Tadesse, Y. KryptoJelly: A jellyfish robot with confined, adjustable pre-stress, and easily replaceable shape memory alloy NiTi actuators. Smart Mater. Struct. 2020, 29, 075011. [Google Scholar] [CrossRef]
- Zhou, Y.; Jin, H.; Liu, C.; Dong, E.; Xu, M.; Yang, J. A novel biomimetic jellyfish robot based on a soft and smart modular structure (SMS). In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 708–713. [Google Scholar]
- Yang, Y.; Ye, X.; Guo, S. A new type of jellyfish-like microrobot. In Proceedings of the 2007 IEEE International Conference on Integration Technology, Shenzhen, China, 20–24 March 2007; pp. 673–678. [Google Scholar]
- Ko, Y.; Na, S.; Lee, Y.; Cha, K.; Ko, S.Y.; Park, J.; Park, S. A jellyfish-like swimming mini-robot actuated by an electromagnetic actuation system. Smart Mater. Struct. 2012, 21, 057001. [Google Scholar] [CrossRef]
- Ren, Z.; Hu, W.; Dong, X.; Sitti, M. Multi-functional soft-bodied jellyfish-like swimming. Nat. Commun. 2019, 10, 2703. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shintake, J.; Shea, H.; Floreano, D. Biomimetic underwater robots based on dielectric elastomer actuators. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 4957–4962. [Google Scholar]
- Cheng, T.; Li, G.; Liang, Y.; Zhang, M.; Liu, B.; Wong, T.-W.; Forman, J.; Chen, M.; Wang, G.; Tao, Y. Untethered soft robotic jellyfish. Smart Mater. Struct. 2018, 28, 015019. [Google Scholar] [CrossRef]
- Frame, J.; Lopez, N.; Curet, O.; Engeberg, E.D. Thrust force characterization of free-swimming soft robotic jellyfish. Bioinspiration Biomim. 2018, 13, 064001. [Google Scholar] [CrossRef]
- Yu, J.; Tan, M. Motion Control of Self-propelled Robotic Jellyfish. In Motion Control of Biomimetic Swimming Robots; Springer: Singapore, 2020; pp. 173–196. [Google Scholar]
- Zhong, Y.; Li, Z.; Du, R. A novel robot fish with wire-driven active body and compliant tail. IEEE/ASME Trans. Mechatron. 2017, 22, 1633–1643. [Google Scholar] [CrossRef]
- Zhu, J.; White, C.; Wainwright, D.K.; Di Santo, V.; Lauder, G.V.; Bart-Smith, H. Tuna robotics: A high-frequency experimental platform exploring the performance space of swimming fishes. Sci. Robot. 2019, 4, eaax4615. [Google Scholar] [CrossRef] [PubMed]
- Gemmell, B.J.; Dabiri, J.O.; Colin, S.P.; Costello, J.H.; Townsend, J.P.; Sutherland, K.R. Cool your jets: Biological jet propulsion in marine invertebrates. J. Exp. Biol. 2021, 224, jeb222083. [Google Scholar] [CrossRef] [PubMed]
- Low, K.H.; Chong, C.W.; Zhou, C. Performance study of a fish robot propelled by a flexible caudal fin. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 90–95. [Google Scholar]
- Romano, D.; Wahi, A.; Miraglia, M.; Stefanini, C. Development of a novel underactuated robotic fish with magnetic transmission system. Machines 2022, 10, 755. [Google Scholar] [CrossRef]
- Hernández-Jaramillo, D.C.; Vásquez, R.E. Design of a Bioinspired Underwater Glider for Oceanographic Research. Biomimetics 2023, 8, 80. [Google Scholar] [CrossRef]
- Masoomi, S.; Gutschmidt, S.; Chen, X.; Sellier, M. The kinematics and dynamics of undulatory motion of a tuna-mimetic robot. Int. J. Adv. Robot. Syst. 2015, 17, 83. [Google Scholar] [CrossRef] [Green Version]
- Dabiri, J.O.; Colin, S.P.; Costello, J.H.; Gharib, M. Flow patterns generated by oblate medusan jellyfish: Field measurements and laboratory analyses. J. Exp. Biol. 2005, 208, 1257–1265. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Costello, J.H.; Colin, S.P.; Gemmell, B.J.; Dabiri, J.O. Hydrodynamics of vortex generation during bell contraction by the hydromedusa Eutonina indicans (Romanes, 1876). Biomimetics 2019, 4, 44. [Google Scholar] [CrossRef] [Green Version]
- Park, S.G.; Kim, B.; Lee, J.; Huang, W.X.; Sung, H.J. Dynamics of prolate jellyfish with a jet-based locomotion. J. Fluid. Struct. 2015, 57, 331–343. [Google Scholar] [CrossRef]
- Bu, K.; Gong, X.; Yu, C.; Xie, F. Biomimetic Aquatic Robots Based on Fluid-Driven Actuators: A Review. J. Mar. Sci. Eng. 2022, 10, 735. [Google Scholar] [CrossRef]
- Raj, A.; Thakur, A. Fish-inspired robots: Design, sensing, actuation, and autonomy—A review of research. Bioinspiration Biomim. 2016, 11, 031001. [Google Scholar] [CrossRef] [PubMed]
- Youssef, S.M.; Soliman, M.A.; Saleh, M.A.; Mousa, M.A.; Elsamanty, M.; Radwan, A.G. Underwater soft robotics: A review of bioinspiration in design, actuation, modeling, and control. Micromachines 2022, 13, 110. [Google Scholar] [CrossRef] [PubMed]
- Cong, Y.; Gu, C.; Zhang, T.; Gao, Y. Underwater robot sensing technology: A survey. Fundam. Res. 2021, 1, 337–345. [Google Scholar] [CrossRef]
- Sun, B.; Li, W.; Wang, Z.; Zhu, Y.; He, Q.; Guan, X.; Dai, G.; Yuan, D.; Li, A.; Cui, W.; et al. Recent progress in modeling and control of bio-inspired fish robots. J. Mar. Sci. Eng. 2022, 10, 773. [Google Scholar] [CrossRef]
- Zhu, Y.; Filipov, E.T. A bar and hinge model for simulating bistability in origami structures with compliant creases. J. Mech. Robot. 2020, 12, 021110. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nozzle Diameter (mm) | Nozzle Cross-Section (mm2) | Average Fluid Velocity at the Nozzle mm/s | Fluid Velocity Fitting Function at the Nozzle mm/s |
|---|---|---|---|
| 15 | |||
| 20 | |||
| 25 |
| Nozzle Diameter (mm) | Jet Length (mm) | Vortex Ring Core Size (mm) | Total Impulse (N·s) | Vortex Ring Formation Number |
|---|---|---|---|---|
| 15 | ||||
| 20 | ||||
| 25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, F.; Kou, Z.; Sefene, E.M.; Mikolajczyk, T. An Origami Flexiball-Inspired Soft Robotic Jellyfish. J. Mar. Sci. Eng. 2023, 11, 714. https://doi.org/10.3390/jmse11040714
Hu F, Kou Z, Sefene EM, Mikolajczyk T. An Origami Flexiball-Inspired Soft Robotic Jellyfish. Journal of Marine Science and Engineering. 2023; 11(4):714. https://doi.org/10.3390/jmse11040714
Chicago/Turabian StyleHu, Fuwen, Zichuan Kou, Eyob Messele Sefene, and Tadeusz Mikolajczyk. 2023. "An Origami Flexiball-Inspired Soft Robotic Jellyfish" Journal of Marine Science and Engineering 11, no. 4: 714. https://doi.org/10.3390/jmse11040714