In this section, a simulation study is presented. The objective is to test and demonstrate the proposed control algorithm for autonomous ship control. The control system is implemented on a simulation model of a coastal cargo ship with a length overall (LOA) of 81.5 m and a beam of 16 m and a displacement of 5335 tons.
3.1. The Machinery Management System
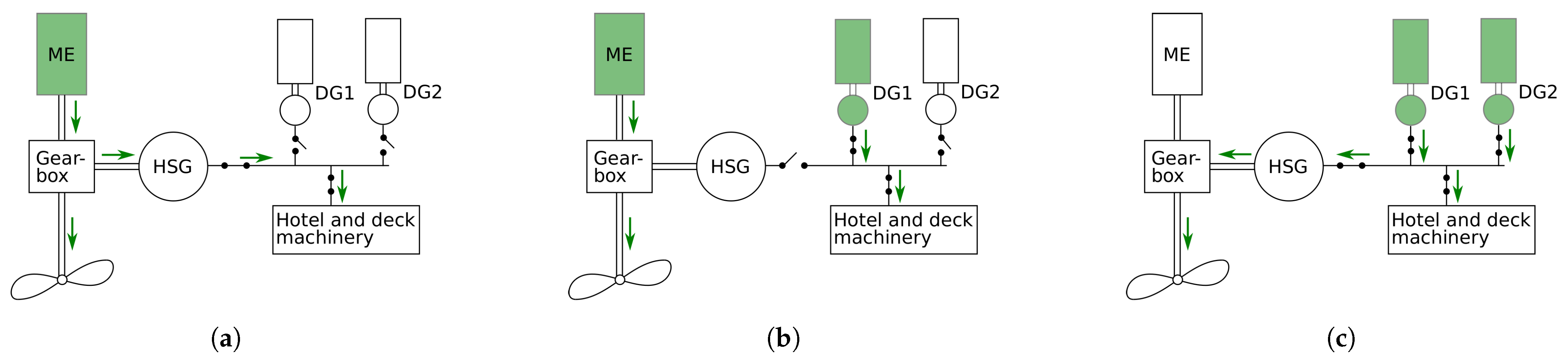
The ship is equipped with a hybrid-electric propulsion system. There is one propeller that is powered from a gearbox. The gearbox can be powered either from the main engine (ME), or from a hybrid shaft generator (HSG). The HSG converts electrical power from an electrical bus that can be powered from two identical diesel generators (DGs). There are several ways in which the propulsion system can be operated. In this case study, only the three predefined Machinery System Operational modes (MSO modes) Power Take Out (PTO), Mechanical (MEC) and Power Take In (PTI) are considered.
As illustrated in
Figure 7a, PTO refers to a mode where the ME is responsible for the main propulsion, as well as auxiliary electrical loads. In this case, both DGs are offline and the HSG functions as a generator, transforming mechanical power from the gearbox to electrical power. In MEC mode, (see
Figure 7b) the auxiliary electrical loads are served by one of the DGs instead of the HSG. Thus, the HSG is off, and all the power produced by the ME is used for propulsion. Finally, as seen in
Figure 7c, PTI mode uses the DGs to provide power for propulsion. In this case, the HSG is acting as an electrical motor, transforming the electrical power from the DGs into mechanical power on the gearbox.
The main engine is a marine diesel engine with a maximum continuous rating (MCR) of 2160 kW, while the two diesel generators are rated at 590 kW each.
3.3. Environment Setup and Route Planning
For proof of concept, a simple simulation environment is created using the ENC package
SeaCharts [
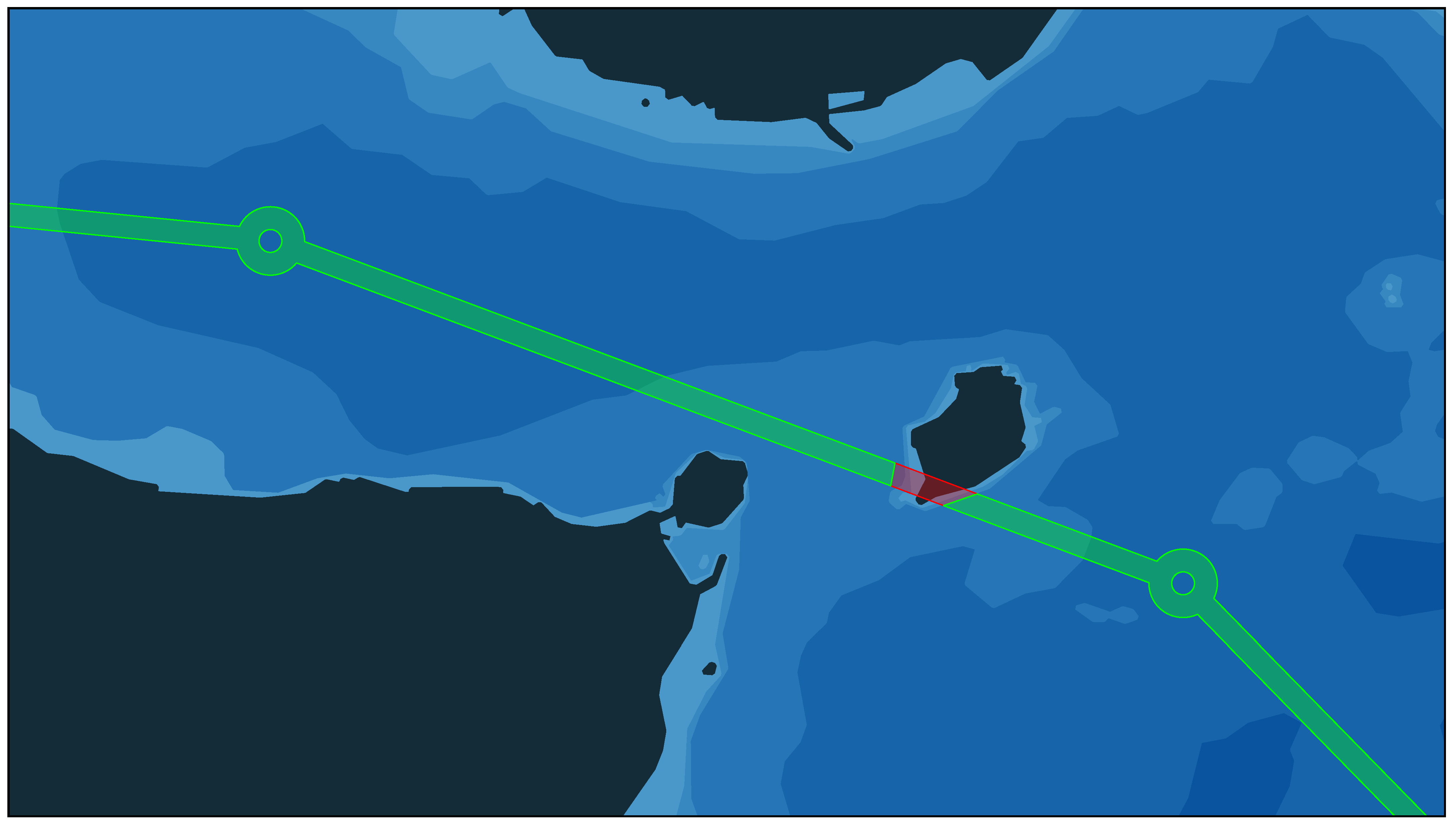
22] in Python 3.10. An area of approximately 14 square kilometers west-northwest of the Norwegian city of Ålesund is chosen for the simulation study, shown in
Figure 8. This environment showcases an interesting scenario in which one may choose between two different paths on either side of an island, and is considered well suited for a proof of concept.
The tentative ship route or path to follow is shown in
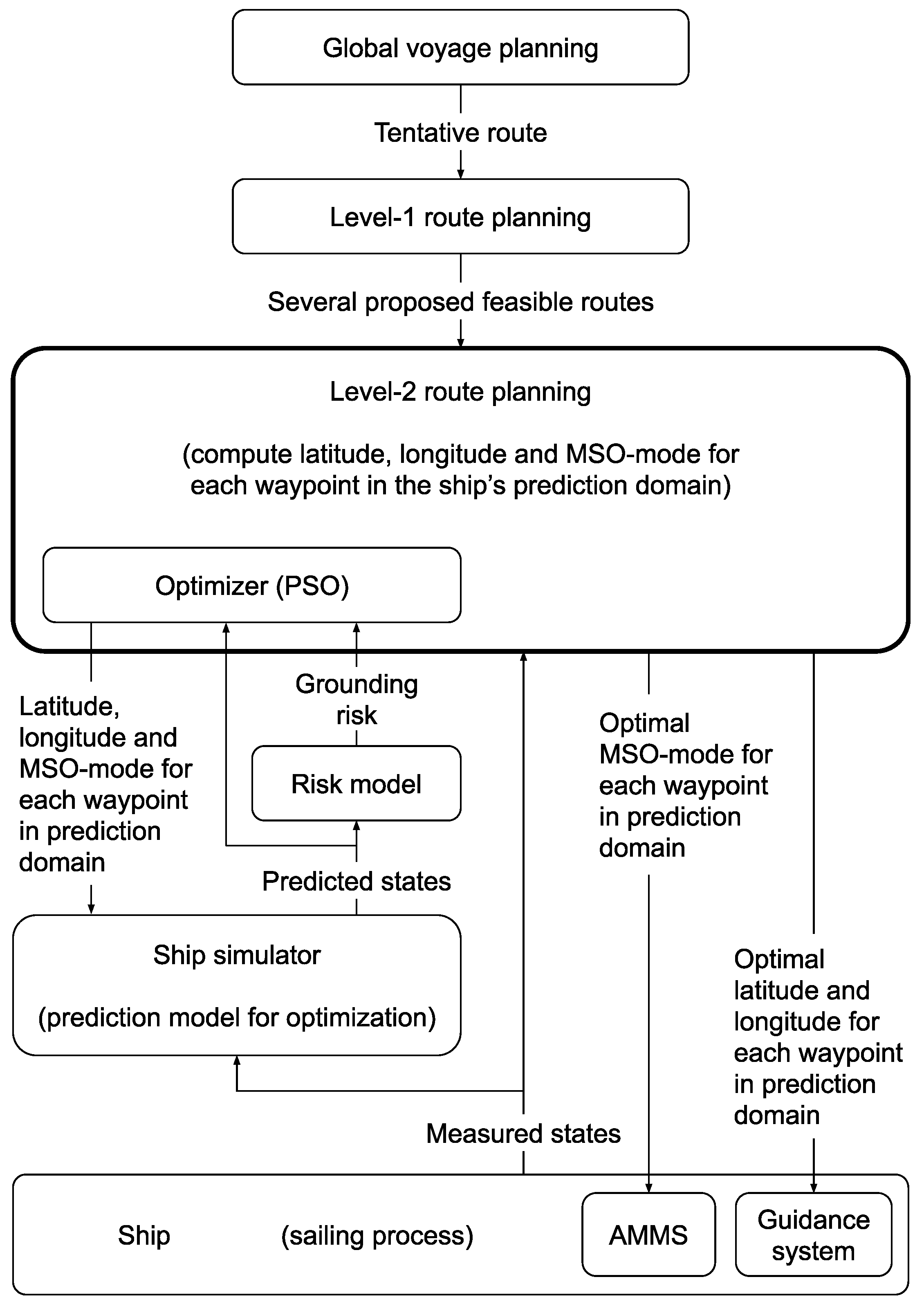
Figure 8 as green line segments connected by “links” at each given waypoint, as generated by the global voyage planner of
Figure 1. Notice however how one of the green line segments are intersecting an island, highlighted by the red color where the island crosses the globally planned line segment. This setup is specifically chosen to demonstrate that if a planned tentative route is somehow inaccurate or incomplete such that grounding obstacles are present along the route, one may utilize e.g., the Level-1 route planner from [
22] to generate alternative feasible routes on opposite sides of the obstacle in question. Moreover, one may analogously extend the anti-grounding algorithm to also encompass collision avoidance of dynamic obstacles, through e.g., the concept of (polygonal) adaptive safety domains [
30] constructed around e.g., nearby vessels. Thus, it is argued that the approach shows significant flexibility and adaptability.
Appendix A contains a summary of the planning algorithm, as well as a visual demonstration of each algorithm step.
Figure 9 shows the result of the Level-1 path planning performed on the ship route of
Figure 8, as generated by Algorithm A1 from
Appendix A. First, the green line segments are checked for intersections with any grounding obstacles in the environment, which in this case yields the red streak as shown in
Figure 8. Second, the convex hull of the intersected grounding obstacle (island) is extracted, and an added buffer of a 50
safety margin is applied in all directions from the obstacle exterior boundary, in addition to the already added 10
buffer and vertex simplification process performed during the construction of the polygons of the SeaCharts ENC. This yields the two convex polygons highlighted around each of the islands south in the environment.
It is important to notice that one should be careful with this “hard” static safety margin. If this buffer around each grounding obstacle is too large, the subsequent path following or guidance controller may have trouble with navigation through extremely narrow straits, or one may even risk closing the strait in its entirety, losing the possibility of navigating through it as a route alternative. Thus, it is argued that the buffer should be somewhat conservative, and that the path following algorithm or controller is expected and required to be capable of operating in the interior of the feasible domain, as opposed to at the boundaries of hard constraints such as the grounding obstacle exteriors. Nonetheless, the Level-1 alternative route path planner is indeed a linear optimization algorithm operating on the vertices and line segments of each grounding obstacle polygons, essentially generating an approximate ship path to be used both during initialization and as part of the cost function of the Level-2 route planning optimizer of
Figure 1.
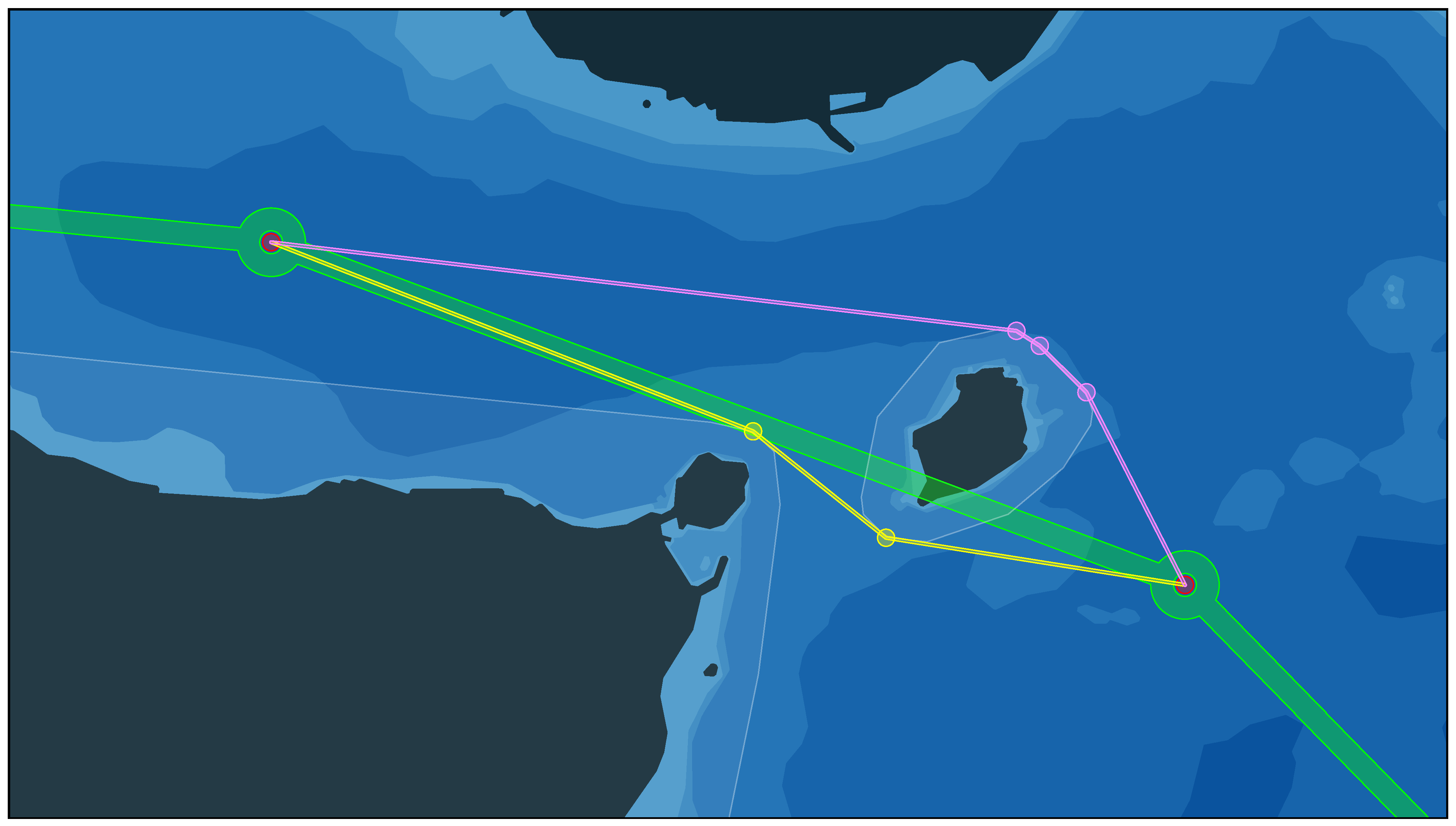
In
Figure 9, the red disk within the path waypoint link to the east shows the start point of the simulation study. Conversely, the red disk to the west is the next target path waypoint. Algorithm A1 iterates through each of the grounding obstacle vertices, and checks if the point is visible (i.e., accessible along a straight uninterrupted line) from the reference point. The first reference point is thus the red east-most starting point, and the distances between each vertex visible from the reference location and the green line segment are measured. The visible vertex farthest away from the path is selected as the first alternate waypoint, and the process is repeated with each newly generated waypoint as the visibility reference location. This generates a new collection of line segments on each side of the grounding obstacle, and these alternative paths are in
Figure 9 shown in yellow and pink. Notice how the generated yellow path originally intersected with the larger island to the south-west, which prompted another sub-run of the algorithm such that the new intersection is considered in the final path alternatives. See
Appendix A for more details on this procedure.
3.4. Particle Swarm Optimization
The waypoint (route) optimizer used in this simulation study is a risk-aware Particle Swarm Optimization (PSO) waypoint planning algorithm which is extended, based on previous works [
23]. Compared to other methods such as Model Predictive Control (MPC) [
20], PSO is not subject to any special cost function construction or feasibility concerns in order to generate solutions (not guaranteed to be optimal). Thus, one may utilize highly discontinuous or discrete cost definitions, allowing for more complex general optimization.
The principle behind PSO is to randomly generate an initial
swarm of N-dimensional solution
particles, and repeatedly update the particle positions with respect to semi-random particle velocities based on their performance measured by the cost function. The technique is widely covered in the literature, and the reader is referred to previous works for more in depth background on PSO [
23].
A simple demonstration case is shown in
Figure 10, in which only the two-dimensional (2D) XY-coordinates of the path waypoints in the horizontal plane are optimized through purely distance-based and spatial costs from the ad hoc risk-aware implementation discussed in [
23]. The same green line segments, start and target in red from
Figure 9 are considered, as well as the newly generated route alternatives—here, shown in gray on each side of the smaller island.
The alternate paths are subsequently split into 20 sub-segments, corresponding to 19 waypoints shown in yellow and pink, respectively. The first line segment corresponds to the given start waypoint. These intermediate waypoints are used directly as the 2D particles to be optimized by the PSO, with respect to any nearby grounding obstacles. The cost function is a sum of simple path-related costs such as total path length and waypoint distances to the original path, as well as a simple risk-aware exponential function applied to the grounding obstacles [
23]. The latter term weighs small distances between the ship position and nearby obstacles very highly compared to far-away locations, essentially adding a dynamic “soft constraint” which prevents the optimized path from crossing obstacles.
It is clear how the yellow and pink waypoints simulate increased risk-aware behavior with respect to the nearby islands, if followed by a navigation or guidance controller. Furthermore, one may also note how the lack of hard constraints keeps the problem well-behaved, even in the more narrow strait between the two islands shown in yellow. If, e.g., the safety margins discussed previously had been increased as a substitute for the distance-based “interior” cost inside the feasible region, one could end up with sharp and even infeasible paths between narrow straits such as the one shown. The magnitude of the obstacle avoidance costs are exaggerated for visibility in this proof of concept.
3.5. Risk Cost Formulation
The formulation of the final risk-aware cost function is subject to many considerations.
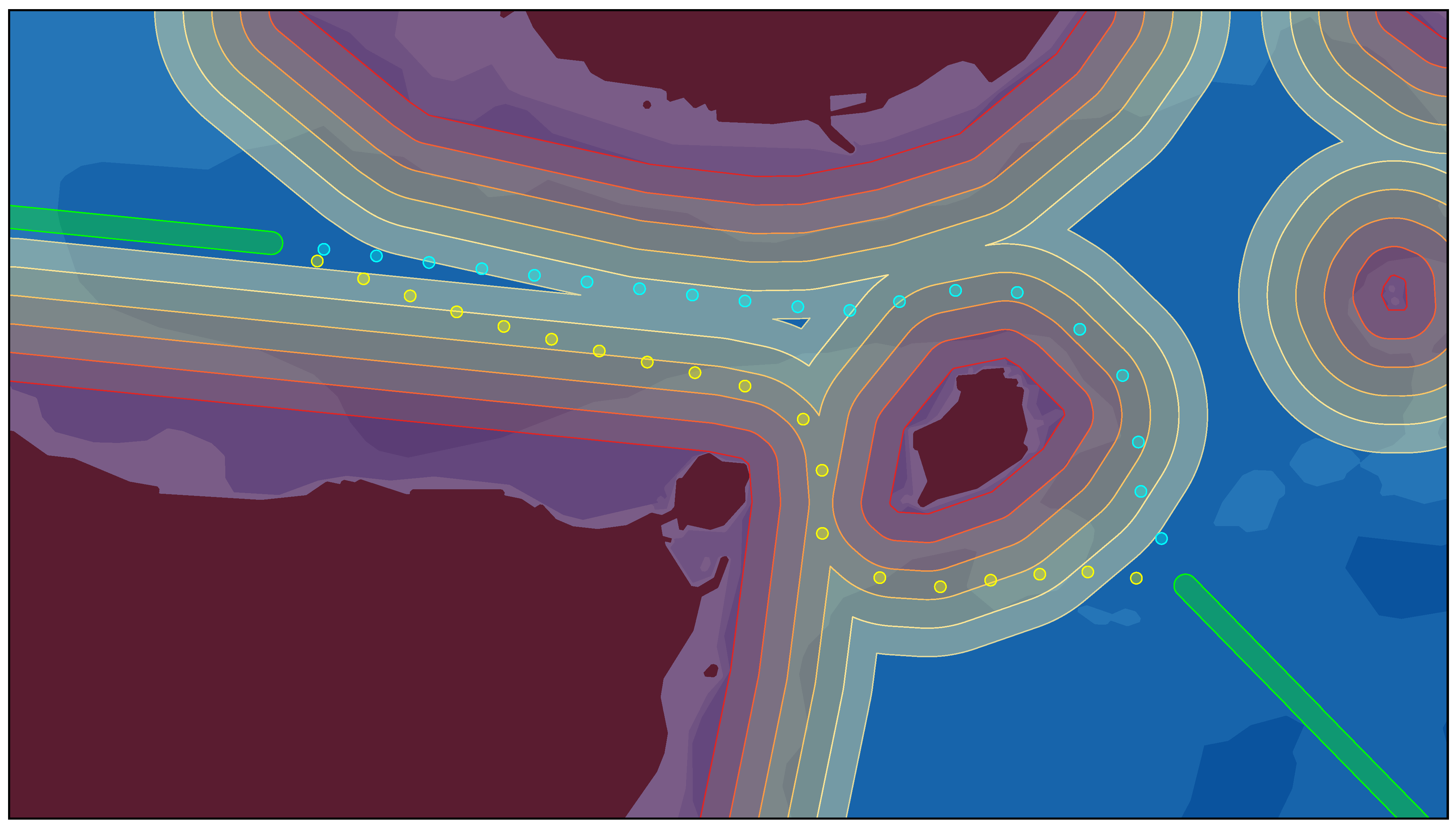
Figure 11 presents a visualization in which the same intermediate yellow and pink waypoints from the
Figure 10 are shown in the colors yellow and cyan (replacing the pink for visibility), respectively. Here, the ends of the green line segments replace the initial route “links”, and denote the original red start and target locations. The increased risks simulated by the exponential term in the cost function is readily apparent from the overlapping contour polygons shown around each grounding obstacle, increasing in intensity and color from light yellow to dark red within the obstacle interiors. The optimized waypoints in yellow and cyan are seen traversing over or along the “hills and valleys” of the risk contours around the obstacles, and there is a strong correlation between the risk contour magnitudes and the resulting waypoints arrangement.
Obstacles previously hidden from sight also become apparent in this view, as every land area, shores and/or seabed depths more shallow than 10 m are included as (convex) red obstacle interiors. Thus, these obstacles also contribute to the spatial optimization, but are in this scenario negligible if sufficiently far away from the considered waypoints. This effect can be verified by comparing the colored intermediate waypoints with the previous alternate line path segments of
Figure 10: There is no considerable discrepancy between the optimized waypoints and the Level-1 planned paths when no grounding obstacles are within some distance from the original path, as a direct consequence of the exponential nature of the risk cost term.
These distance-based risk awareness contours of
Figure 11 resembles artificial potential (repulsion) fields, which is another popular approach used for path planning for e.g., unmanned autonomous vehicles. This method is however prone to becoming stuck in local minima and may show poor performance in narrow passages such as the isle strait considered here, and these issues must also be recognized and handled when using PSO. The sum of additional path-related costs are valuable in this regard, strongly related to the previous point with respect to the negligible divergence between the Level-1 routes and the optimized waypoints further away from obstacles: By enforcing large costs associated with straying away from the original path (as well as increasing the total path length), the (near-) optimal placements of each waypoint are semi-forced along the original path. This approach does however place more responsibility onto the Level-1 planner in order to achieve satisfactory solutions, which is considered appropriate following that the global planned path is already assumed to be near-optimal in this study.
In previous works, a scalar cost with respect to environment (wind) disturbances was used in conjunction with the static distance-based grounding obstacle costs to account for the increased risks present when obstacles are located down-wind (or down-stream) of the ship [
20,
23].
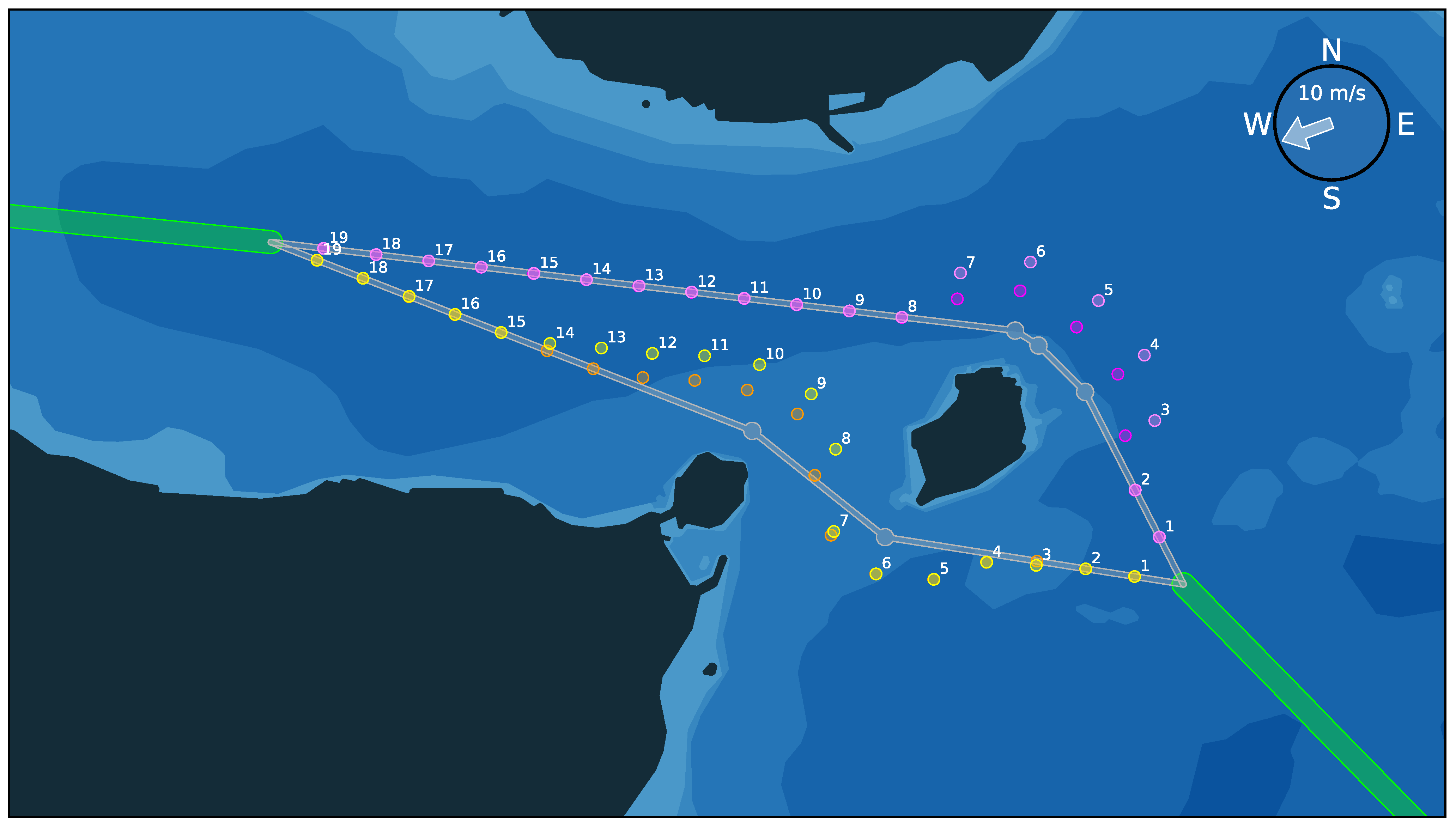
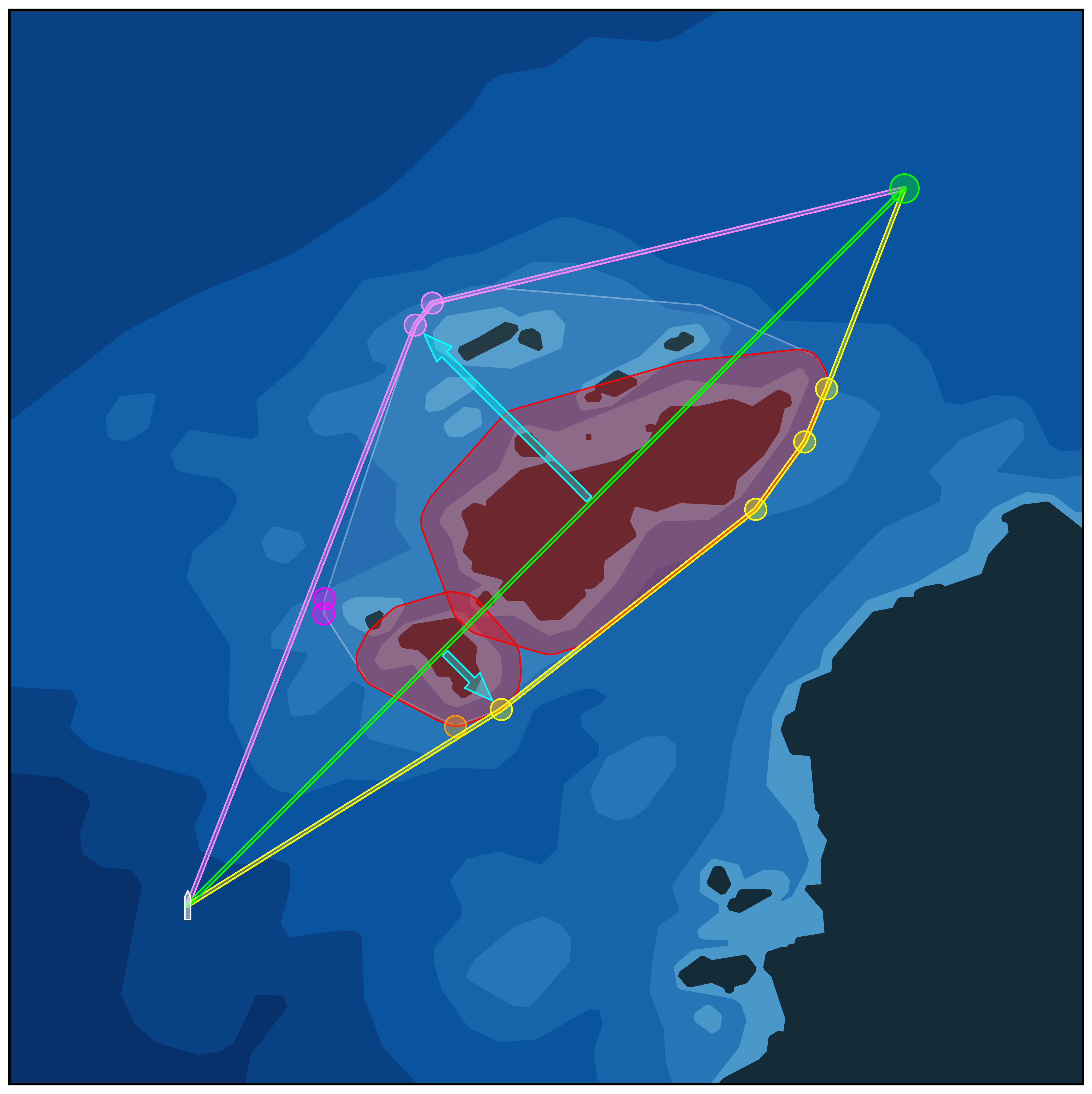
Figure 12 shows a comparison view of the effect this extra cost term has on the waypoint distribution across each route alternative. The yellow and pink waypoint paths of
Figure 10 are here denoted in orange and magenta, respectively, and the new resulting waypoints of each alternative including the added scalar product cost term are shown in yellow and pink.
For simplicity, only wind disturbances are included in the proof of concept demonstration. In the upper-right corner of
Figure 12, the wind direction and wind velocity of the disturbance forces are shown as 250° and 10
/
, respectively. It is clear how the scalar product of the wind direction and the direction to each grounding obstacle weighs more heavily onto the waypoint costs, effectively shifting them in approximately the opposite direction. Though the PSO algorithm is entirely sample-based and not gradient-based, the direction of the extra perturbations of the spatial waypoint locations are very similar, as expected. See the visualizations and discussions presented in the previous works for more details [
20,
23].
Some interesting effects are seen on a few waypoints. On the pink path, one can see how WP3 is more eastward, and WP7 is almost completely northward compared to their magenta counterparts, due to the scalar product of the closest point on the nearby grounding obstacle and the wind direction. Most notably, WP3 of the yellow path demonstrates a slightly unintended effect of using this risk cost formulation. Here, the wind direction (in this example) compared to the direction of the nearest potential point of grounding as seen from the ship, is such that the scaled extra cost of the exponential scalar product term is sufficient to noticeably move the waypoint southward unnecessarily. Though the risk cost scaling in these examples are exaggerated greatly for visual clarity, effectively resulting in less efficient routes around the islands, there is evident potential for improvements.
Thus, a new risk cost formulation is presented in this paper, which utilizes a ship model and the concept of TTG in order to produce more precise and appropriate waypoint planning solutions. It is argued that this cost formulation reflects realistic scenarios to a higher degree, more accurately incorporates the dynamics (i.e., the trajectory) of the ship, and is considered a natural addition to the cost function given the new scope which also includes machinery management considerations. The final cost function is presented in
Section 3.9.
3.7. Time-to-Grounding (TTG) Predictions
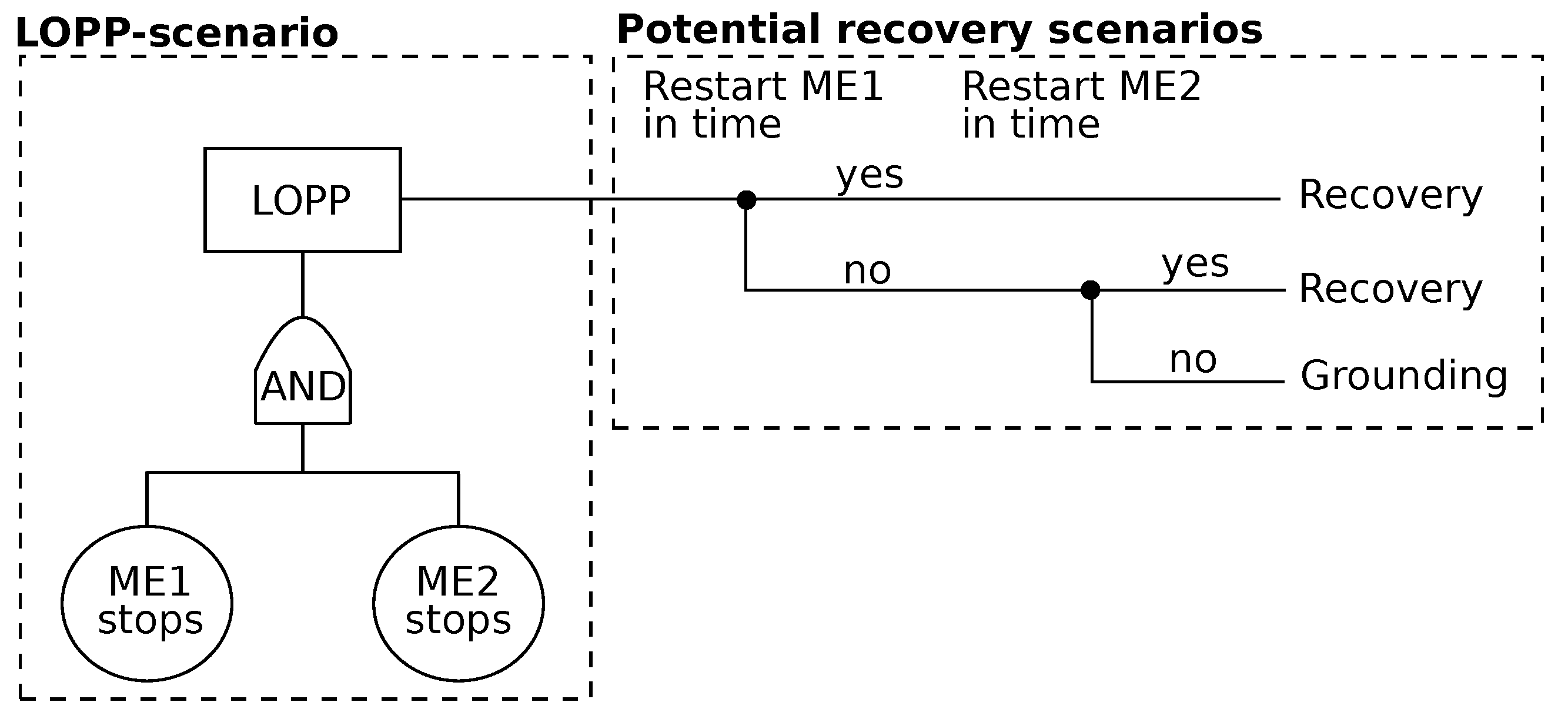
As noted in the discussion related to
Figure 3 and
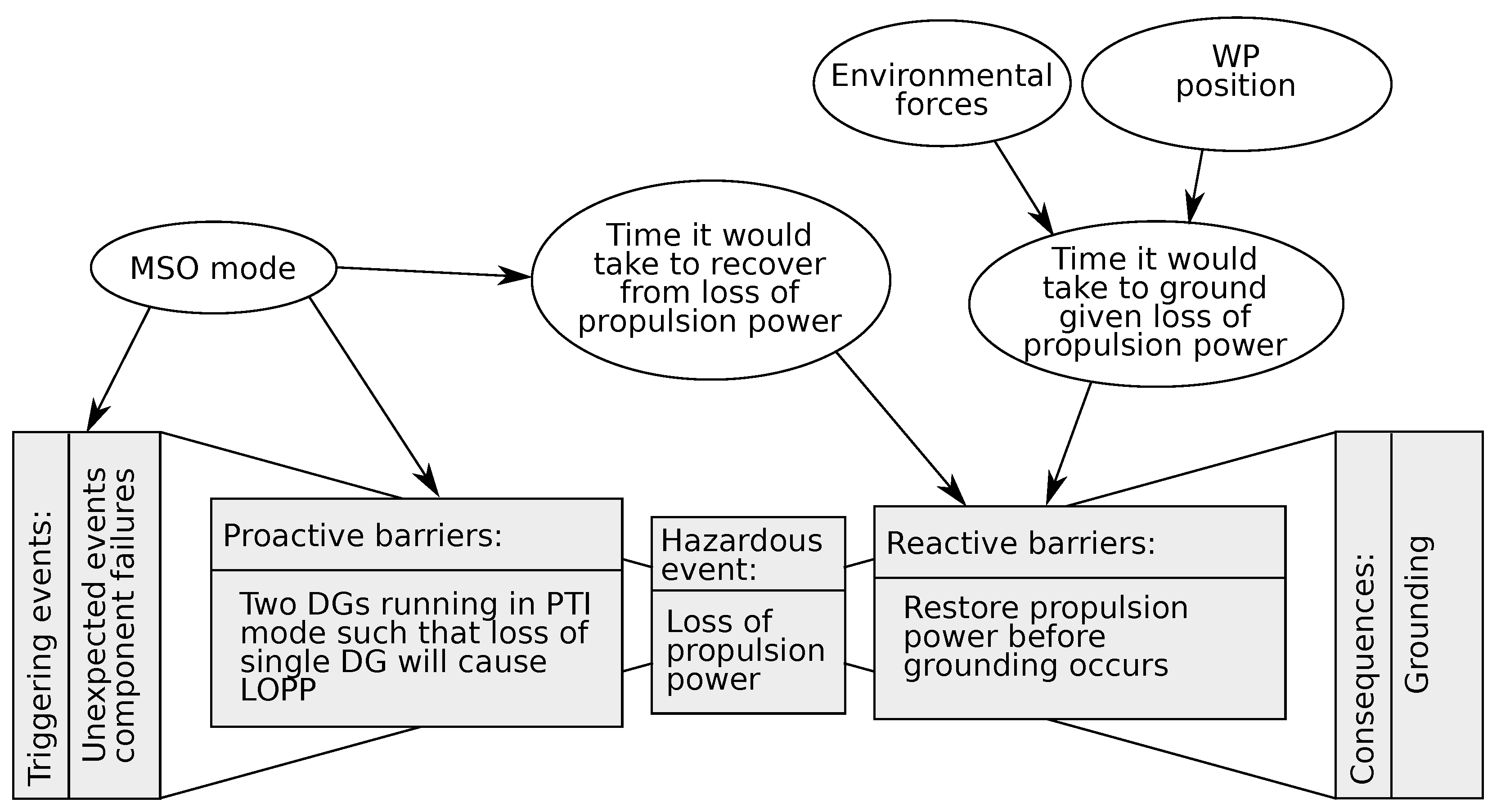
Figure 4, the principle of “time-to-grounding” is simply to predict when (if) a ship would experience a grounding event if a LOPP (machinery failure) scenario occurs at a given time instant along the planned path, given the current or expected environment (weather) conditions.
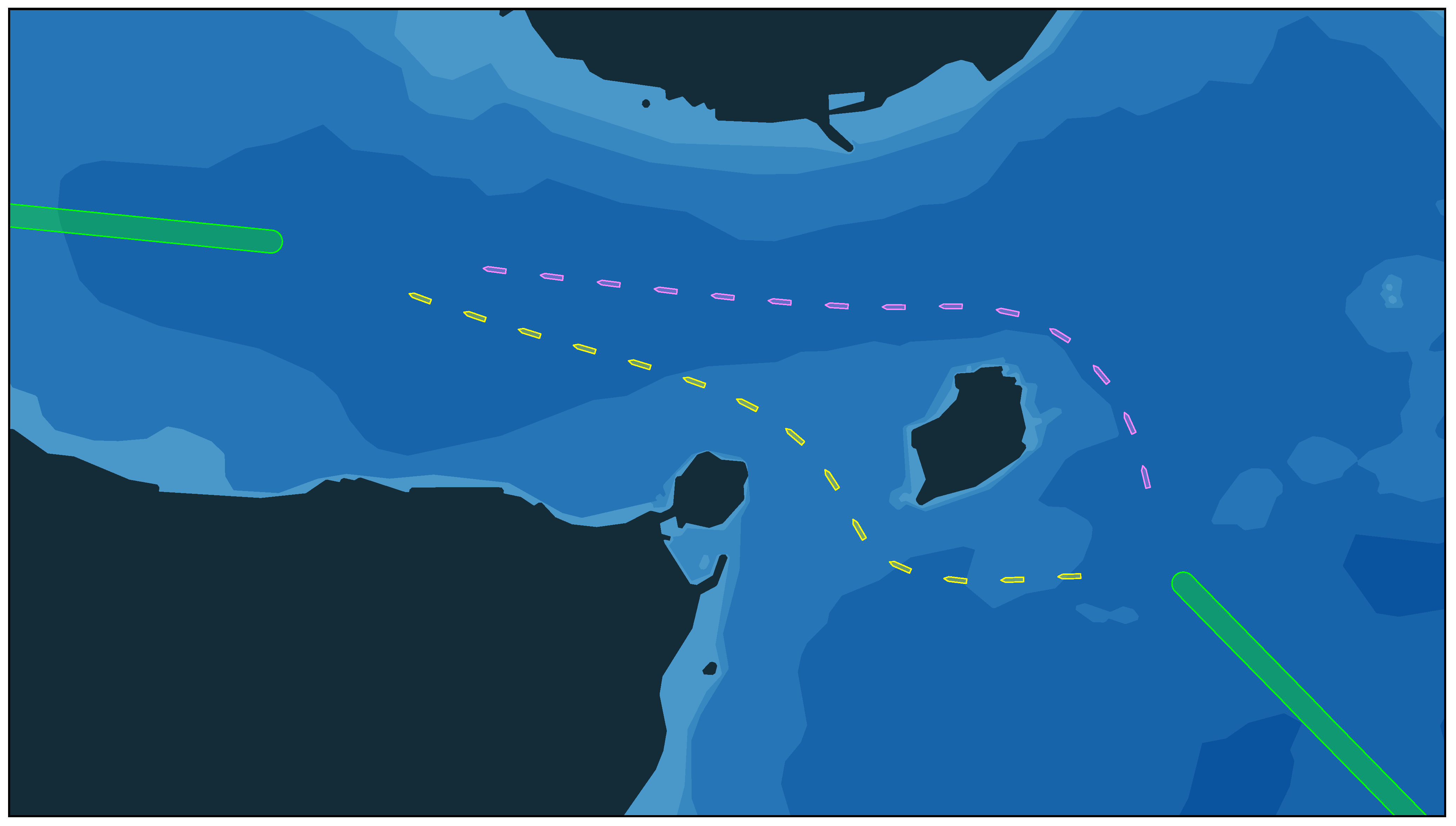
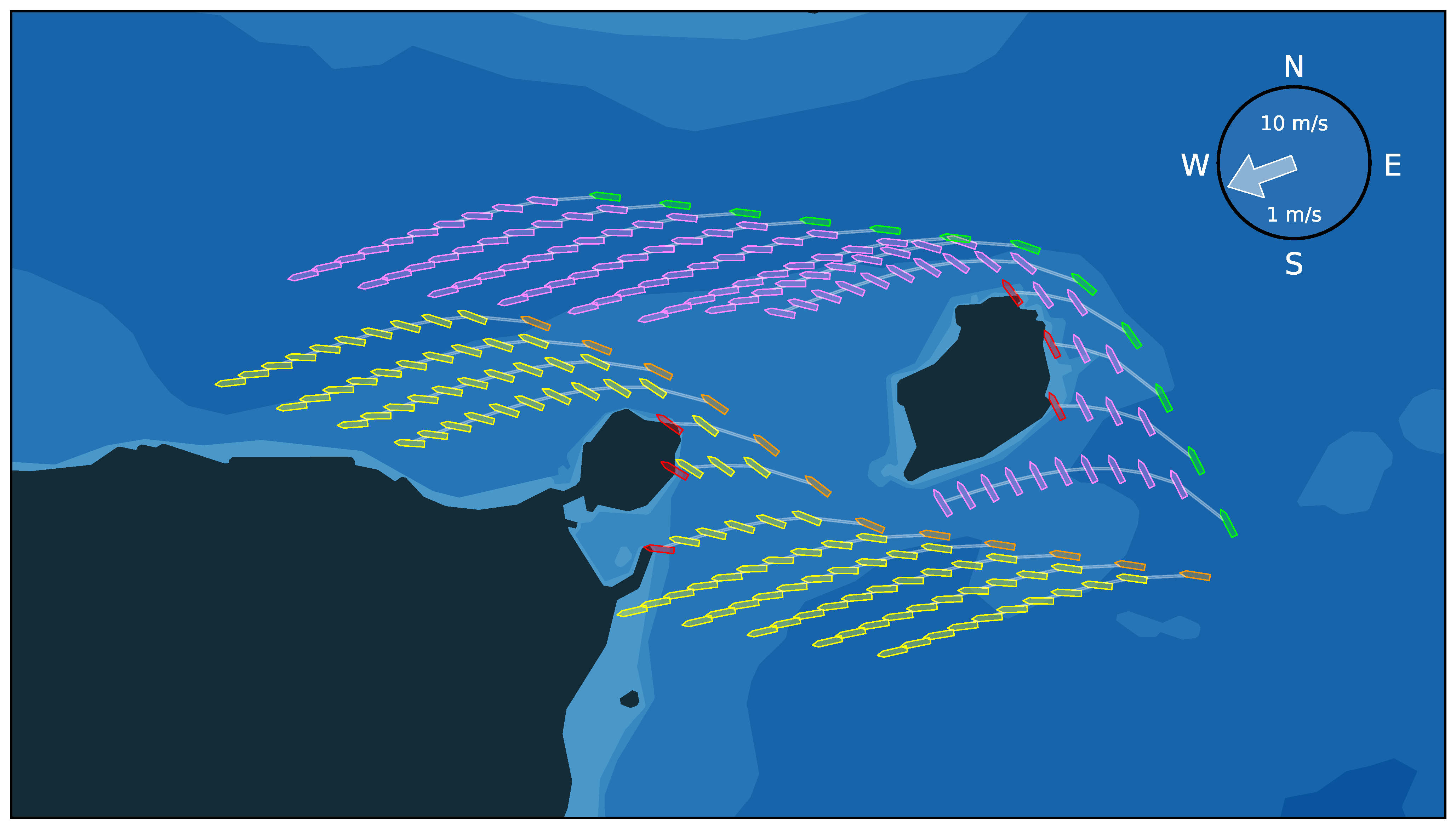
Figure 14 presents a demonstration of the TTG predictions. The wind velocity is 10
/
, and the current velocity is 1
/
. Here, the orange and green collections of ship poses are not simulation trajectories, but rather the ideal ship poses defined for each waypoint distributed evenly along the original paths. This shows how an initial ship yaw angle or heading is needed for each (ideal) waypoint in order to predict TTG. The angles are calculated using the angle between the previous and the next (neighboring) waypoints, for each individual waypoint. The yellow and pink colored ship poses denote the predicted trajectories during a LOPP scenario corresponding to each ship pose of the orange and green routes, across a horizon of 10
.
The predicted future trajectories with no propulsion and steering are simulated by the ship model, and include the ship dynamics and initial ship speed before loss of propulsion power. As expected given a wind direction of 250°, the ship in the orange trajectory is predicted to drift south-west toward the south-west island, and the ship in the green trajectory would firstly hit the smaller island. Moreover, as the accumulated probability of grounding only increases (and is defined) given that a grounding event has not occurred, the future predictions are ended if any part of the ship intersects with a grounding obstacle. These intersections are shown as red ship poses. Note that the red grounding events may be asynchronous with respect to the regular sampling intervals of predicted ship state (pose), across the LOPP scenario horizon.
3.8. MSO Mode Selection and Fuel Consumption
The TTG predictions are used to inform the optimization during the PSO run, i.e., to select the most suitable MSO mode as well as the waypoint locations during optimization. This is due to the fact that each MSO mode have different fuel consumption rates when active, and have different restoration properties. The resulting time values of the TTG predictions are subsequently translated into grounding probabilities, and then expected costs through the rate of failure probabilities and restoration rates of
Table 2,
Table 3 and
Table 4. These costs are ultimately weighted against all other costs defined by the path following cost function, and the PSO outputs three-dimensional (3D) solution particles consisting of the X and Y coordinates of each waypoint, and the selected MSO mode to be used for the following time interval.
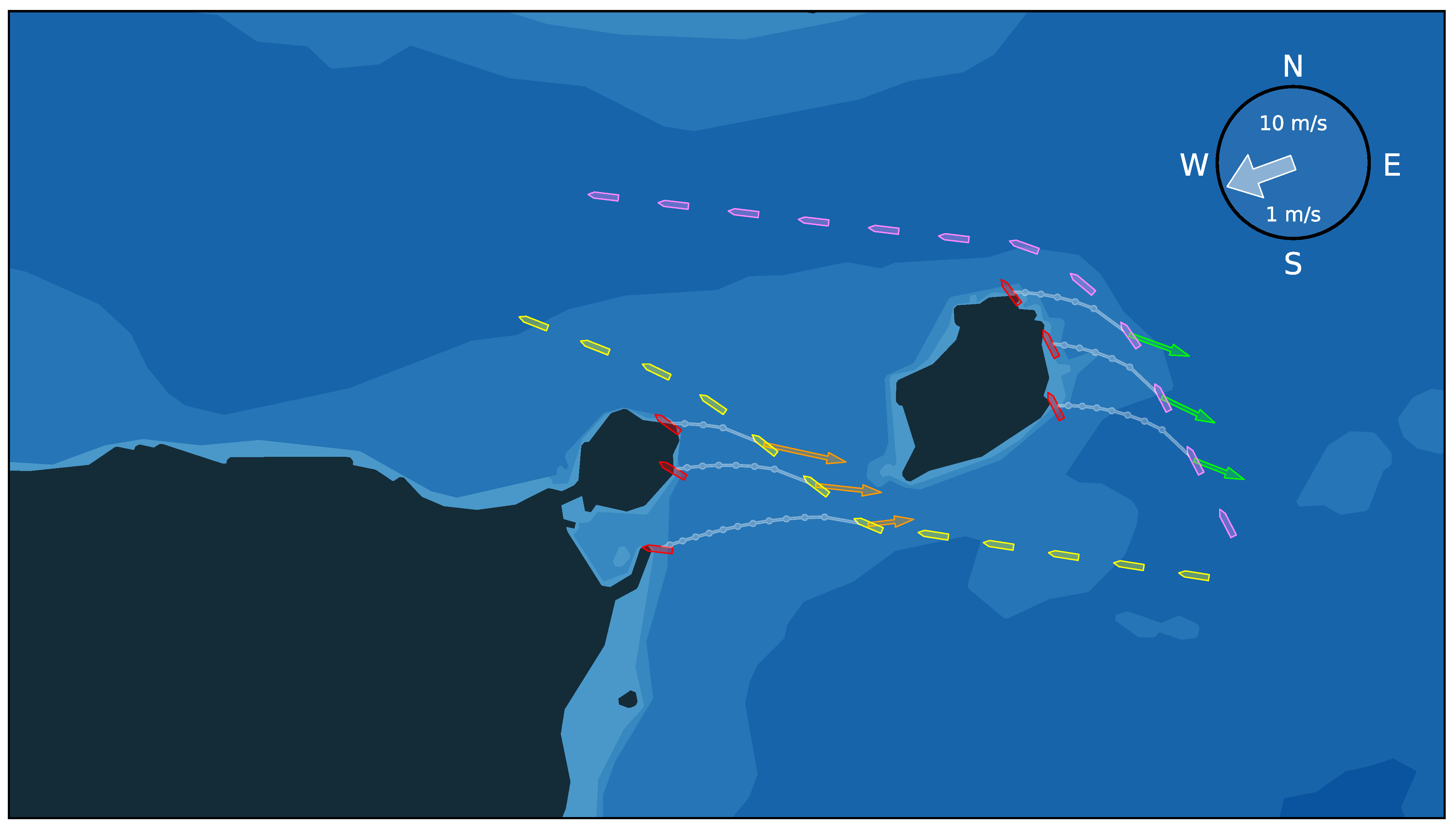
Figure 15 presents an alternative view of the ideal sailing routes and LOPP blackout predictions of
Figure 14, in which additional directed arrows denote how the 2D cost
gradients of the waypoint locations in the horizontal plane are affected by the TTG predictions and resulting estimated costs. The altered locations of the optimized waypoints would in turn
increase the total fuel consumption, assuming that the original path is near-optimal. It is intuitive that since the risks for a grounding event occurring increases along the direction of the wind disturbance, a purely spatial cost function would move the waypoint locations away from the predicted points of impact [
20,
23]. However, in this work, the MSO mode selection also plays an important role.
In this figure, the trajectories are unchanged for the purpose of conceptual demonstration and comparison to later results. For this example, both trajectories experience proximity to higher grounding probabilities for an approximately equal amount of time. However, in general, this is not necessarily the case, and the fuel consumption along the complete trajectories are highly dependent on both the specific MSO mode selected, and the accumulated time spent in the mode. Thus, it may sometimes be more economically prudent to simply move the route waypoints further away from the grounding obstacles, as an alternative to disrupt the machinery to go into another (i.e., safer but also more costly) MSO mode. This joint combination of spatial path optimization and operational mode cost minimization during operations is considered the novel contribution of this work.
3.9. The Complete Cost Function and Simulations
Based on the discussions and intermediate results of the previous sections, the final complete cost function is formulated as follows:
where
is a 2D waypoint corresponding to the
kth line segment along a route alternative, and
x,
y,
k and
m are the x- and y-coordinates of a waypoint, the line segment number and the selected MSO machinery mode, respectively.
The second term of is raised to a larger (even) power than the first to more strongly encourage distributing the waypoints with equal distances between each other, compared to being close to the ideal reference waypoint along the route. is the total sum of the negatively scaled minimum distances to every grounding obstacle raised to the power of e, which serves as an exponential barrier function for nearby grounding obstacles irrespective of the heading of the ship or any disturbances.
is the accumulative grounding probability function from (
5), and
is the estimated fuel cost per meter traveled. For simplicity, it is for (
11) assumed that the variable costs defined in (
10) are held constant for the entire optimization horizon, i.e.,
is static based on a set of assumptions related to the current surrounding environment. The reference waypoints
denote the ideal waypoint locations evenly spread across all line sub-segments along a route alternative if left completely unaltered by grounding risk costs, i.e.,
(see the pink waypoints 8 to 19 in
Figure 12). In this work, the PSO setup used 30 candidate particles in each particle swarm (one for each of the 20 line segments), and was run for 100 iterations. The following hyper-parameters of the PSO was used: The inertia weight was set to 0.75, the cognitive weight was 1.0, the social weight was 2.0, and the velocity limit was 1.0.
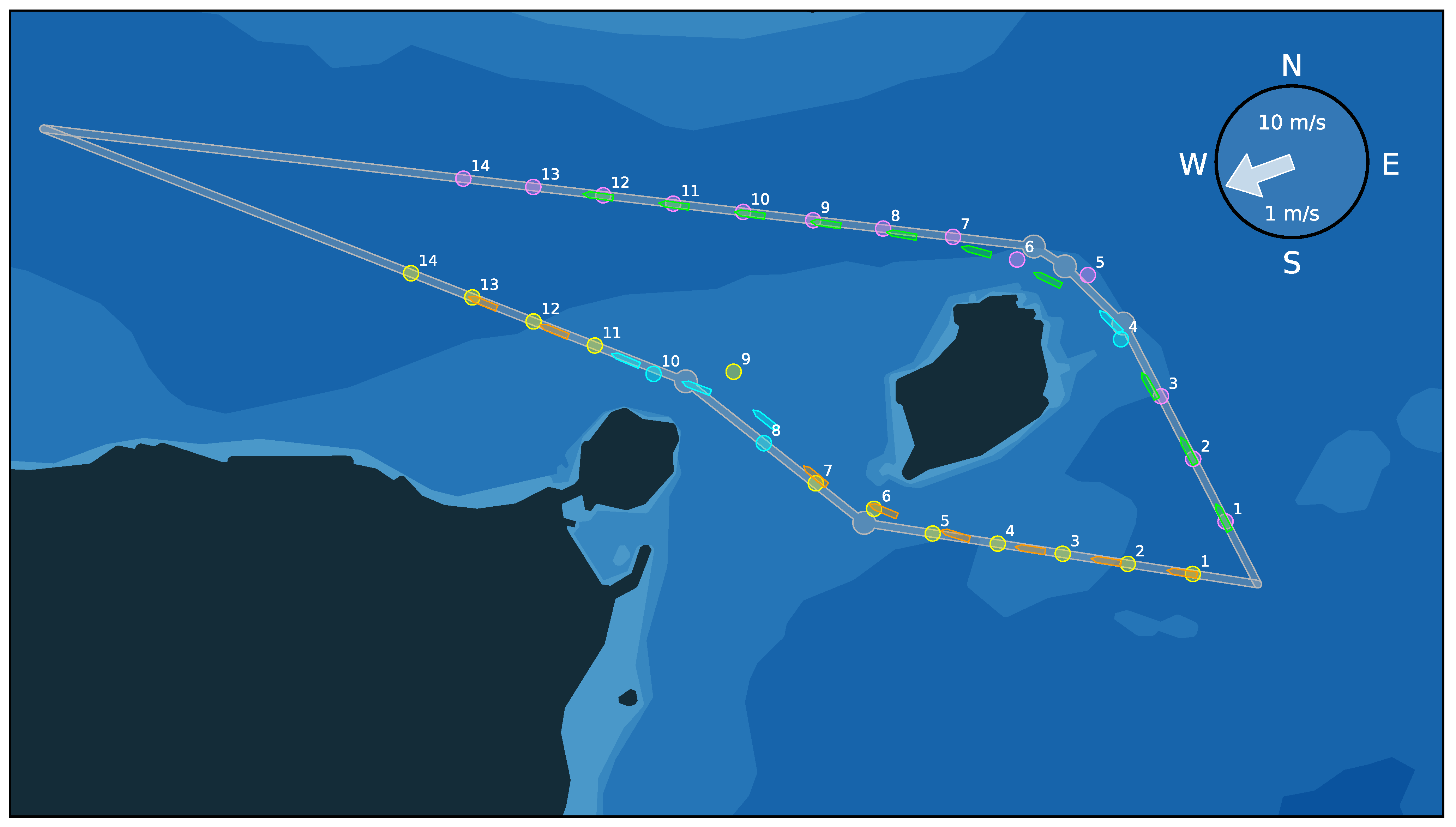
Using the path following guidance controller, the resulting optimized WP distributions and trajectories of each route alternative are shown in
Figure 16. The green trajectory follows the resulting PSO route in pink, and the orange trajectory follows the yellow route. The target ship heading each time interval is calculated by drawing line segments between the optimized waypoints, and extracting the target coordinates by intersecting the resulting path by a circular horizon radius of 200
. Thus, the generated ship trajectory is entirely independent of the distance between each optimized waypoint of the PSO, and the smoothness of the path to follow may be improved simply by increasing the number of waypoints to optimize.
The cyan waypoints on both routes denote where the most robust but costly MSO mode is selected for a specific WP interval (MEC), and the cyan ship pose shows where the ship has this mode active during its voyage in order to reduce the expected costs of grounding due to the TTG simulations. All other waypoints are given their original colors when using the most economical MSO mode (PTO). These results show how e.g., WP10 of the yellow route and WP6 of the pink route are allowed closer to the nearby obstacles compared to e.g.,
Figure 12 (demonstrating the approach of previous works [
23]), as the cost function now integrates and considers the ship dynamics.
Moreover, it may be noted that the MEC mode is still selected also for the line segment following WP9, for the purpose of demonstration—the MSO mode selection algorithm may utilize more advanced mode management mechanisms than simply choosing the most economical at each interval. It is also apparent that WP9 in this example is moved away from the nearby obstacle, leading to the normal PTO mode being selected. Though such mode switching generally is unwanted due to additional startup/switching costs, this outcome is included here for completeness only; a more sophisticated behavior may be tweaked and fine-tuned as desired.
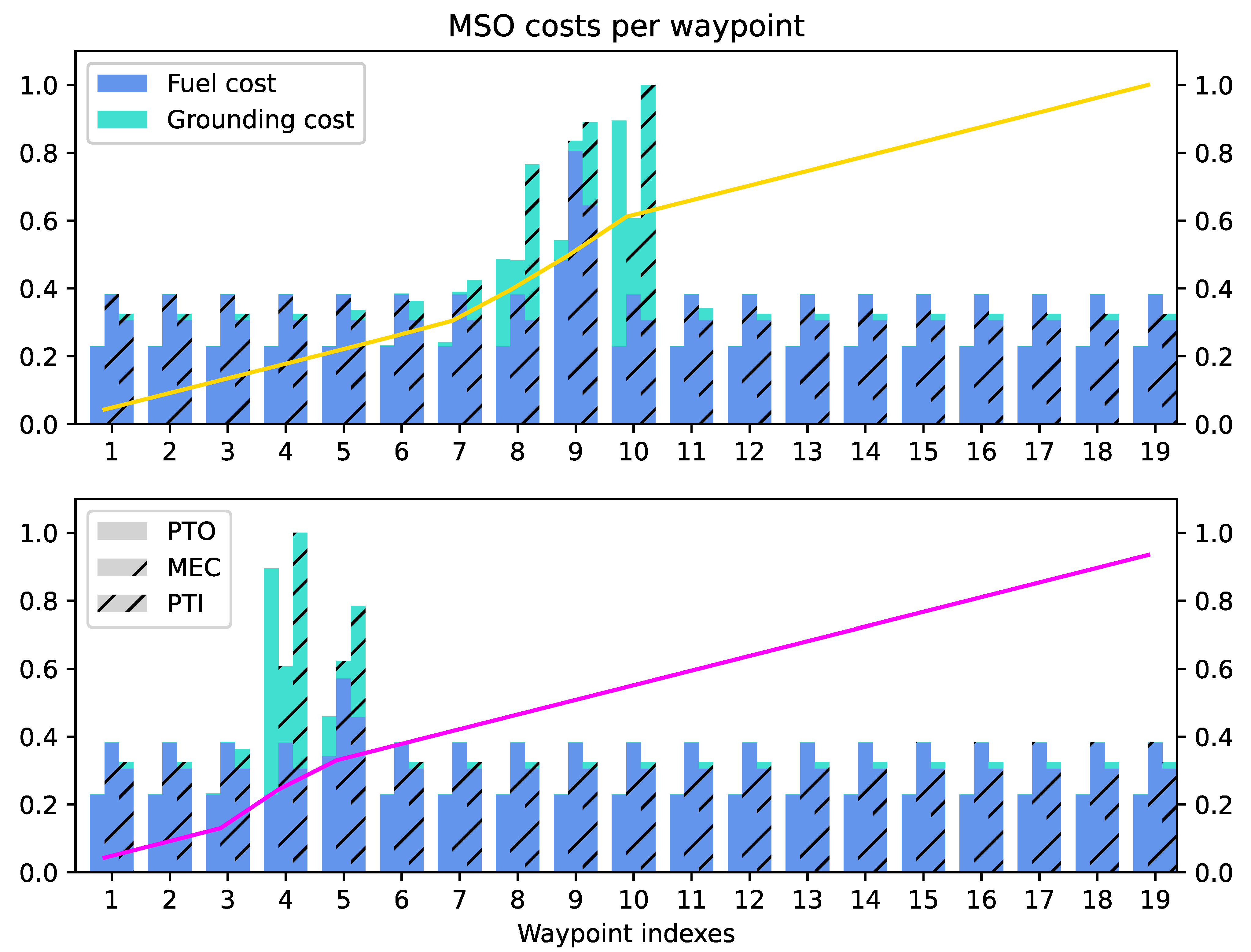
Graphs of estimated (expected) grounding and fuel costs of each route, as well as the total accumulating costs along each alternative, are presented in
Figure 17. Expected costs for grounding shows the
term of
(
13) for each waypoint, and are shown as blue bars. It may be noted that as the scaling coefficients for grounding events are constant in this work, the value of the blue bars may serve as proxy visualizations for the grounding probabilities P(G) experienced during the TTG simulations of each waypoint, i.e., a taller bar means a larger expected rate of grounding occurrences, which are noticeably different for each mode due to their inherent restoration capabilities. Expected (additional) costs for added fuel consumption with respect to the optimal path are denoted as the green bars on top. The three different MSO modes PTO, MEC and PTI are denoted by zero, halved and fully streaked bars, respectively. The total heights (sum) of these bars are the total expected costs of each MSO mode selection, for each waypoint.
It is apparent how each MSO mode are proportionately related to different fuel cost rates and grounding risk probabilities (due to different restoration rates), e.g., PTO has a lower fuel cost but also a larger grounding risk scaling associated with it, compared to that of MEC. During optimization, the mode with the lowest total cost is simply chosen for each route line segment between optimized waypoints. Note that the cost coefficients used in this work are ad hoc for a proof of concept, and are consequently only meaningful relative to each other. Thus, both Y axes are normalized between 0 and 1.
Definite indications of increased grounding risks and thus expected costs are clearly visible for WP 6, 7, 8, 9 and 10 for the yellow path, and WP 3, 4, and 5 for the pink path. This is in line with the visual information shown of the environment in
Figure 16, i.e., the nearby grounding obstacles affect the costs as expected. One may also note that, despite being as close to the obstacles as the mentioned points, WP 11 of the yellow path and WP 6 and 7 of the pink path are not affected in the same way, due to the general direction of the TTG predictions as a result of the given disturbances. Moreover, there is a noticeable difference between the expected fuel cost of WP 9 in the yellow path compared to its two neighbors. This also corresponds to the visually apparent location shift of the waypoint, in which the increased fuel costs of moving the waypoint in this situation were less expensive than the expected grounding costs for this specific interval. One possible explanation for this result may be that the expected TTG for this interval is less than the shortest minimum time required for all available restoration events, which significantly increases the grounding risk for that initial waypoint location.
The yellow and pink lines are the accumulating costs of each respective route, used to select the most efficient route. Ultimately, the pink route with its resulting green trajectory was chosen due to the lowest total expected cost across the entire (predicted) simulation run. This result shows how the fastest route may not always be considered the most cost-effective within a specific environment and set of conditions, and thus a slightly longer but more effective and/or safer route is generated and selected as the optimal choice.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}