
Analysis of the Wave Attenuating and Dynamic Behaviour of a Floating Breakwater Integrating a Hydro-Pneumatic Energy Storage System

Abstract
:1. Introduction
2. Current Research and Technological Status
3. Proposed Concept
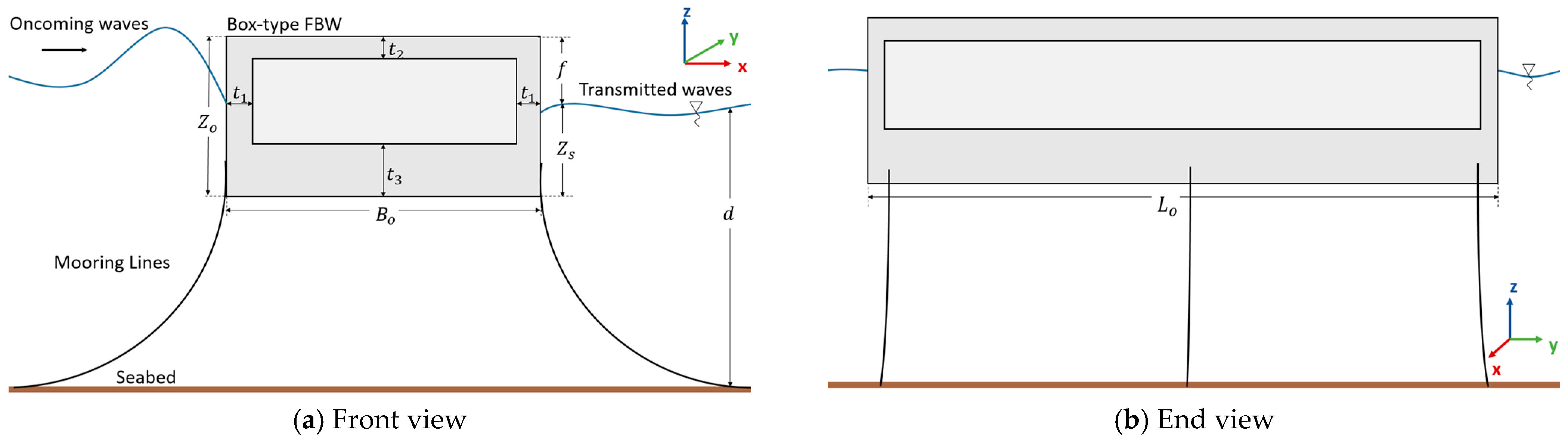
3.1. Baseline Floating Breakwater—Model A
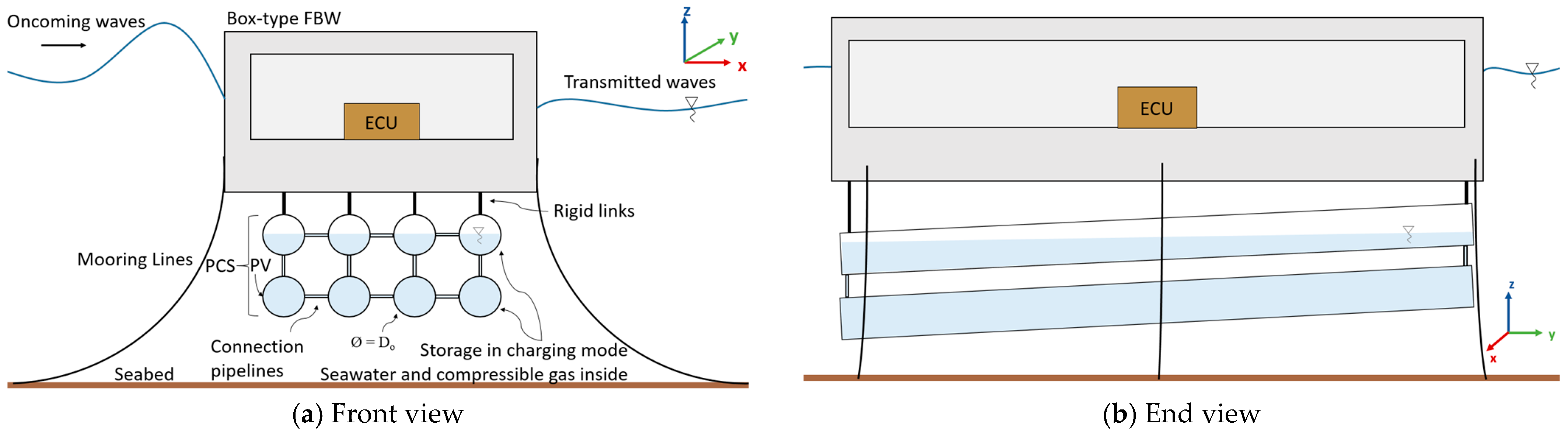
3.2. Hybrid Floating Breakwater—Model B
3.2.1. The Floating Breakwater Unit
3.2.2. The Energy Storage System
4. Methodology
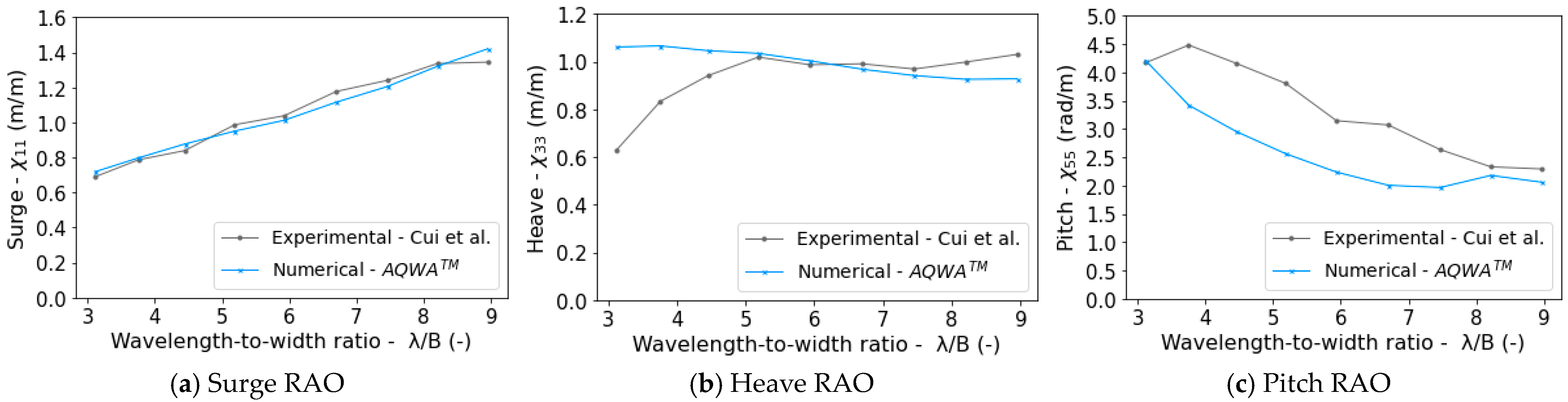
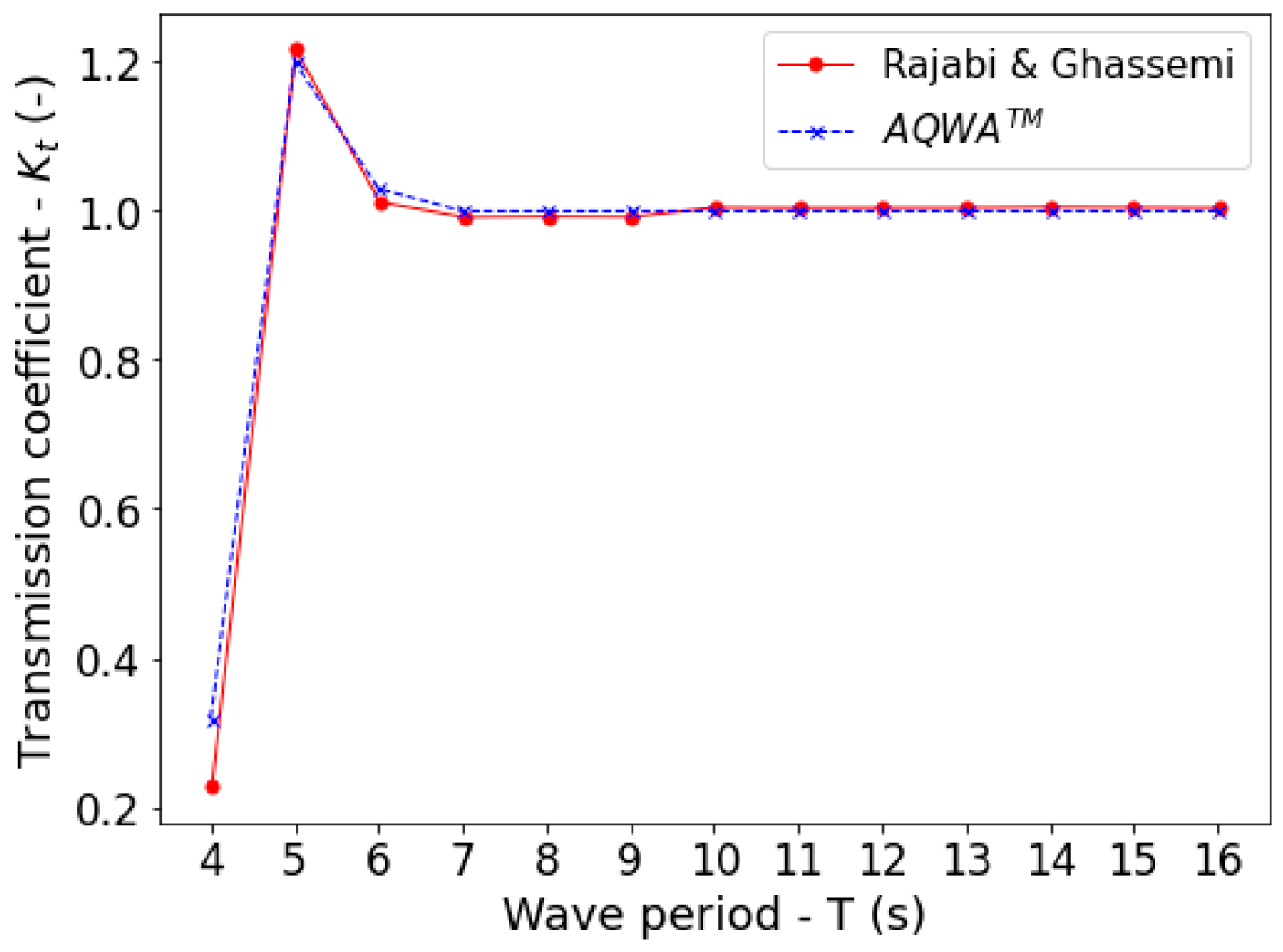
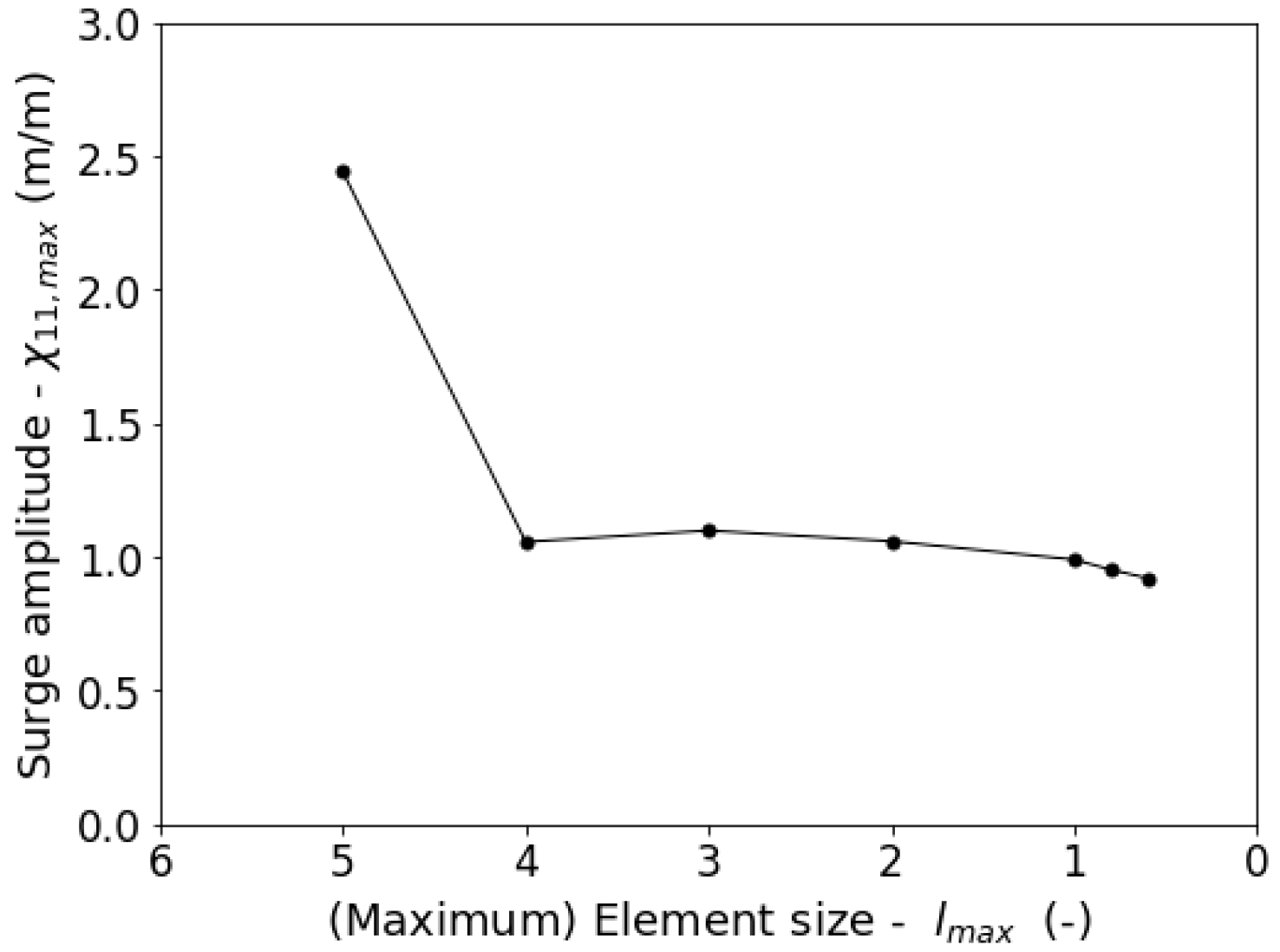
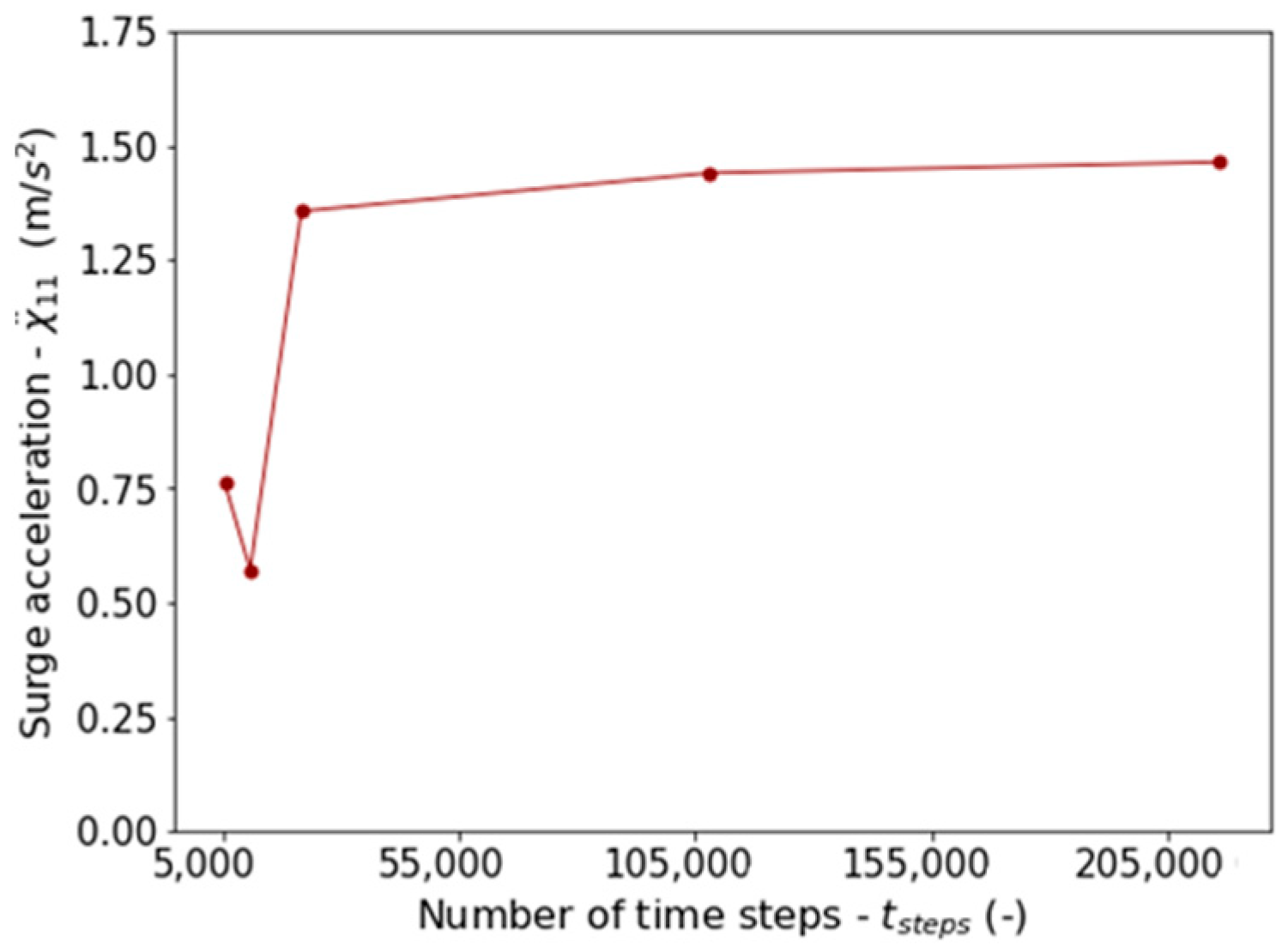
5. Validation and Numerical Accuracy
6. Results and Discussion
6.1. Hydrostatic Analysis
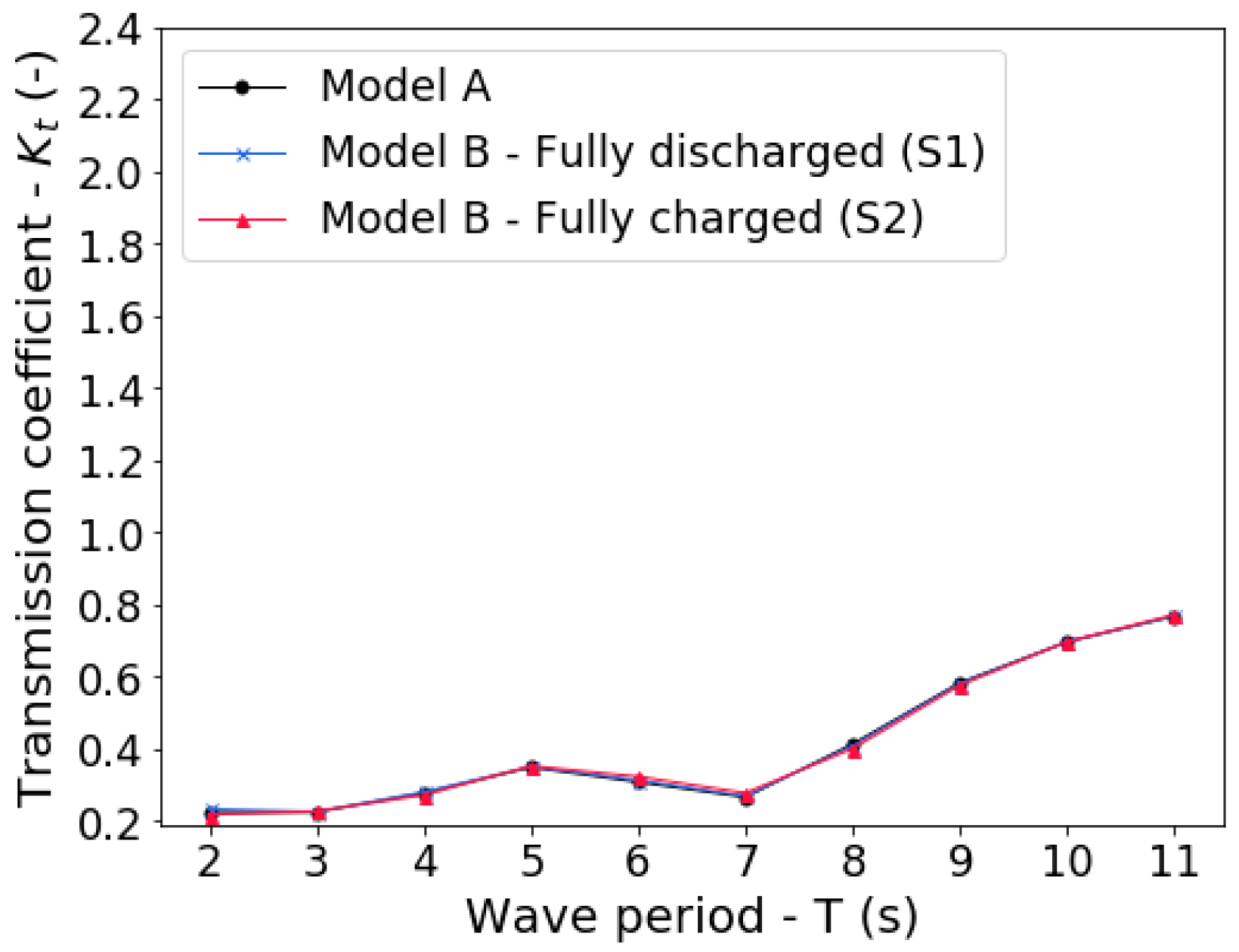
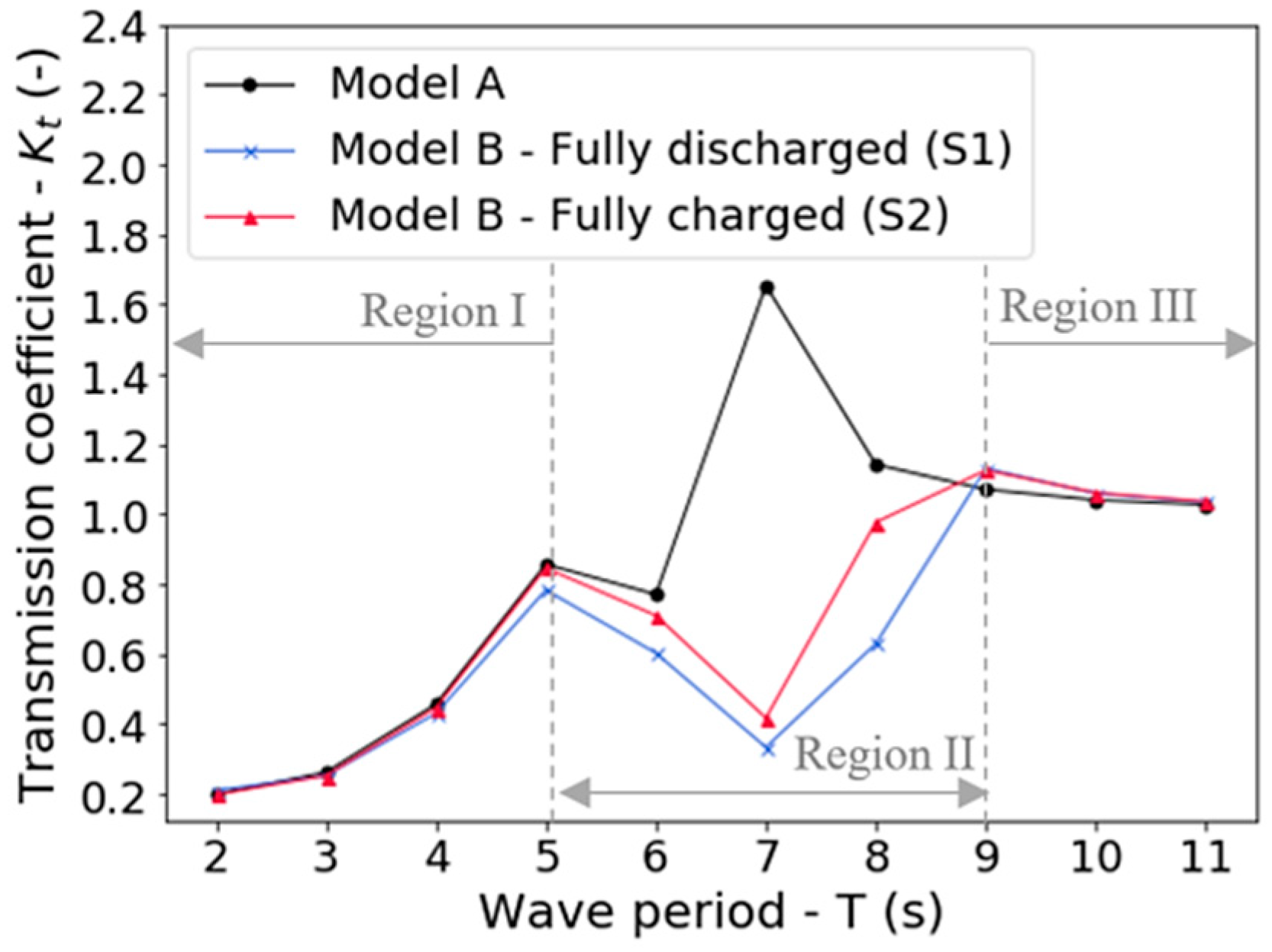
6.2. Wave Attenuation Performance Analysis
6.3. Hydrodynamic Time Response
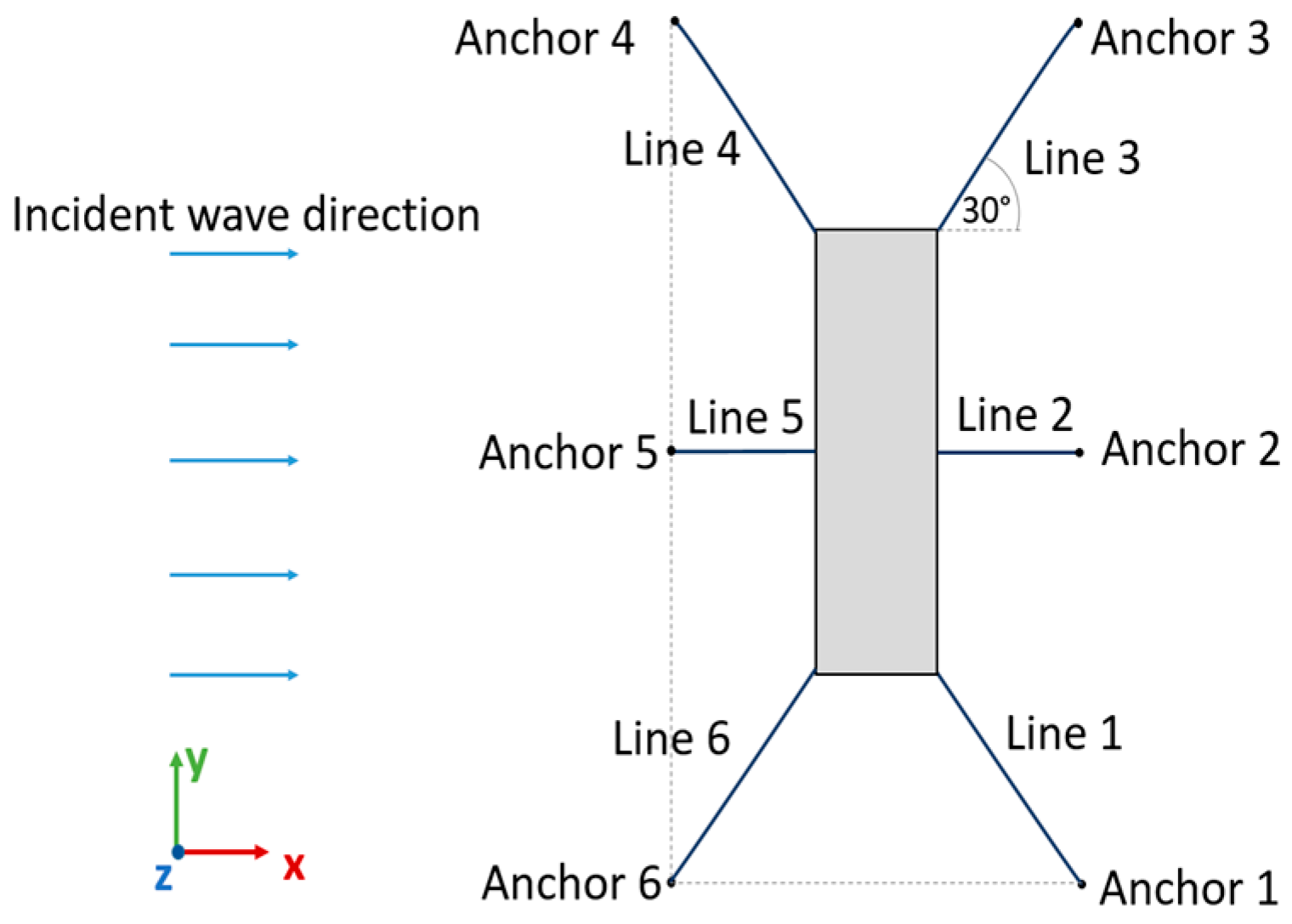
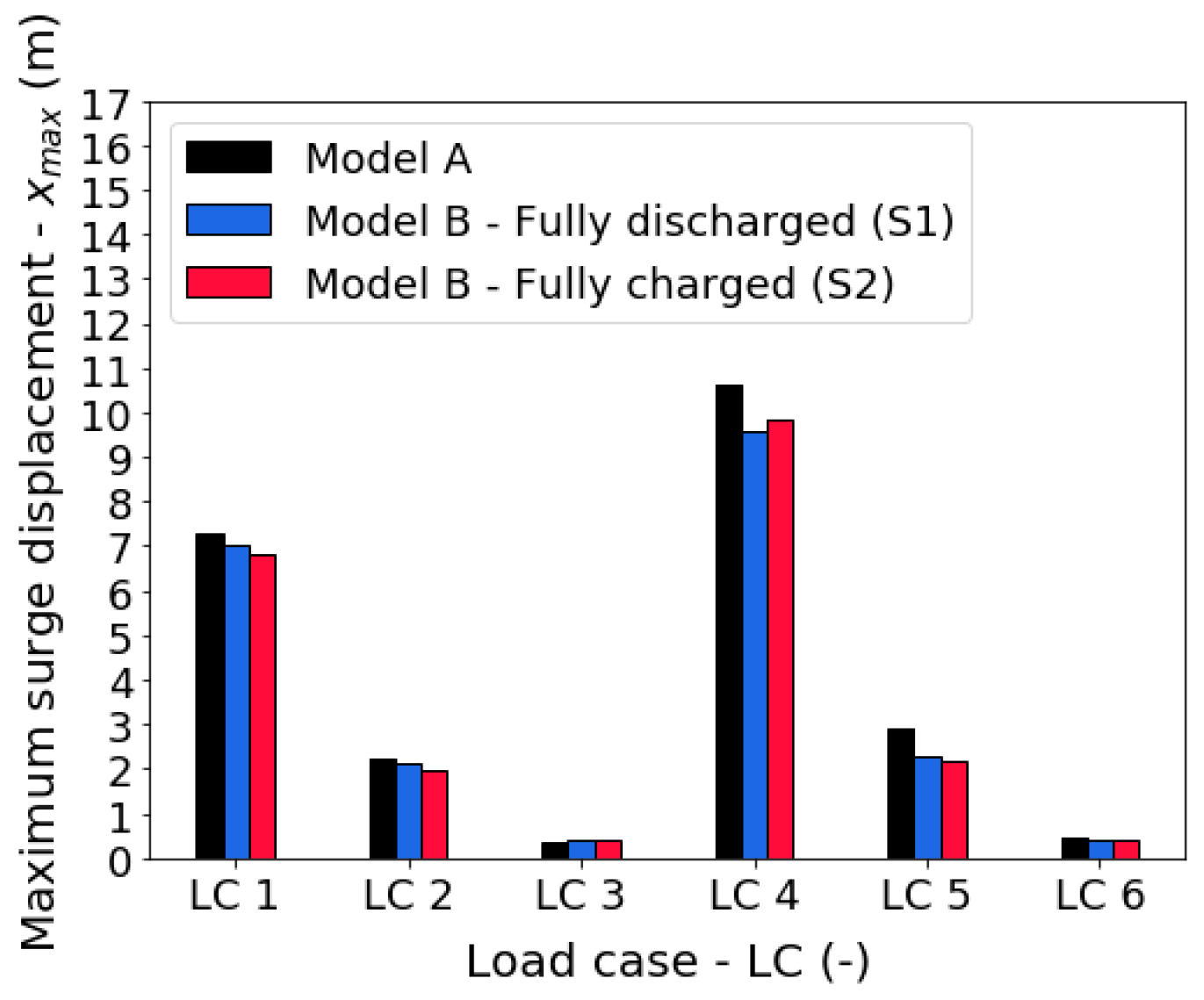
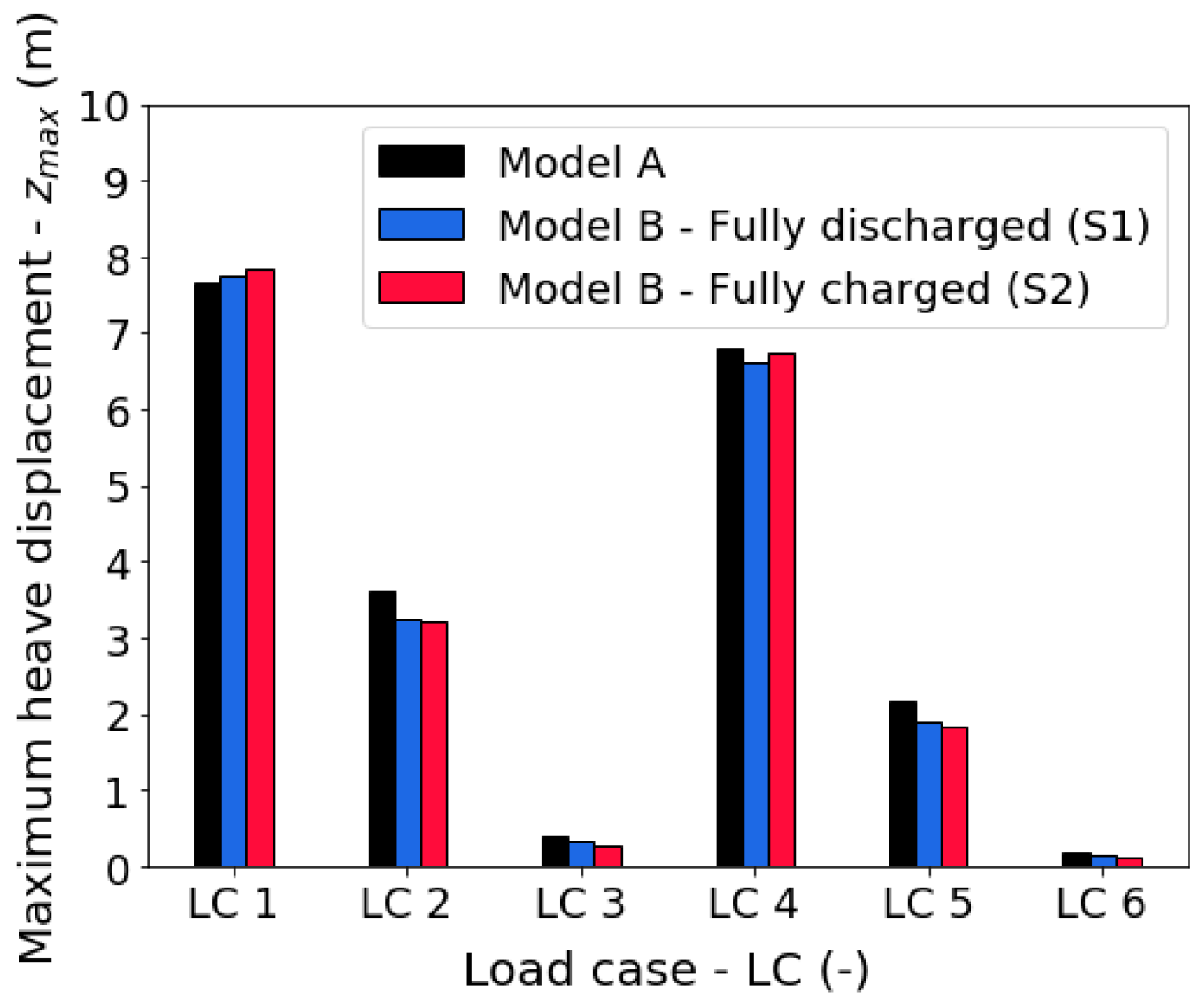
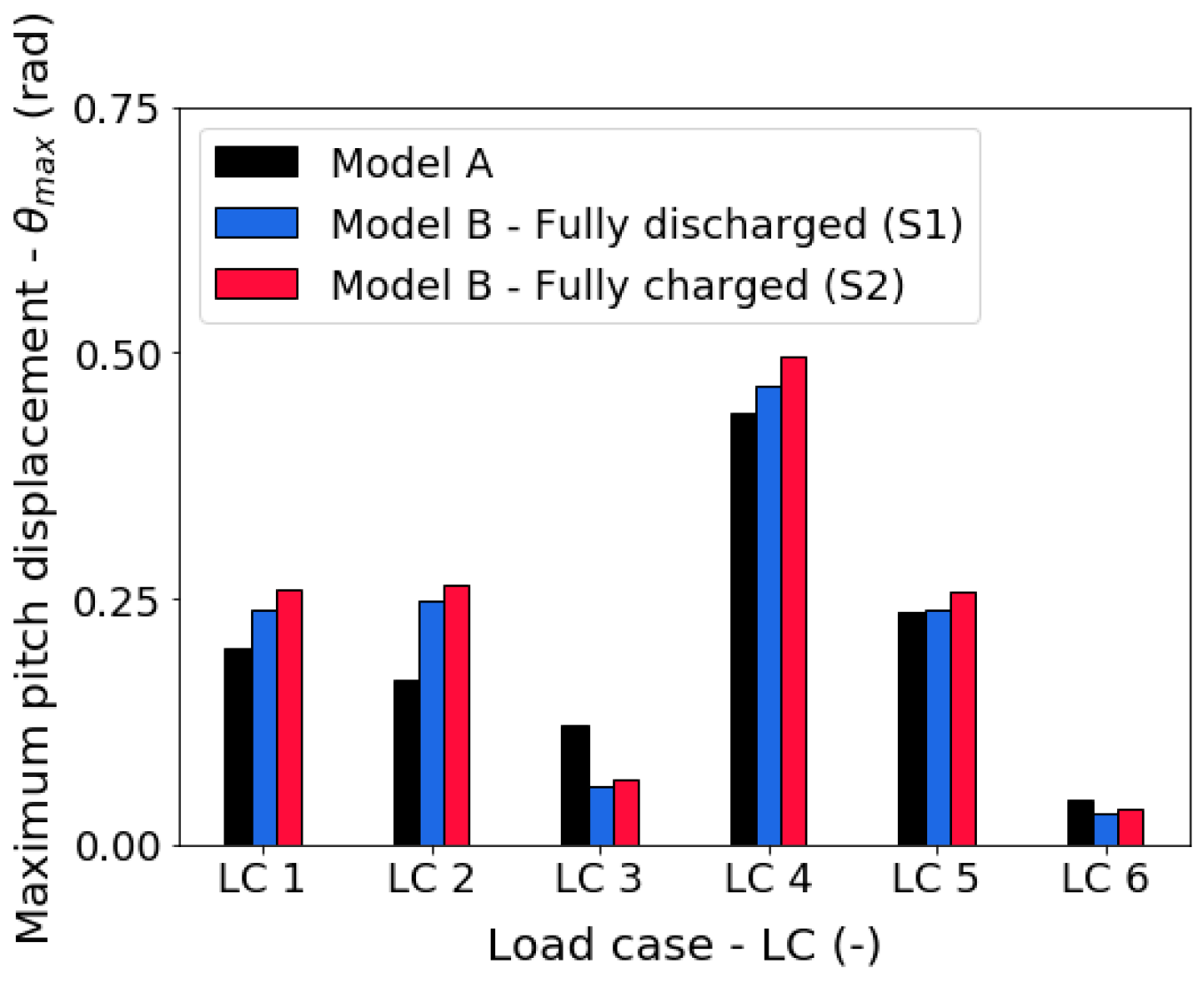
6.3.1. Displacements
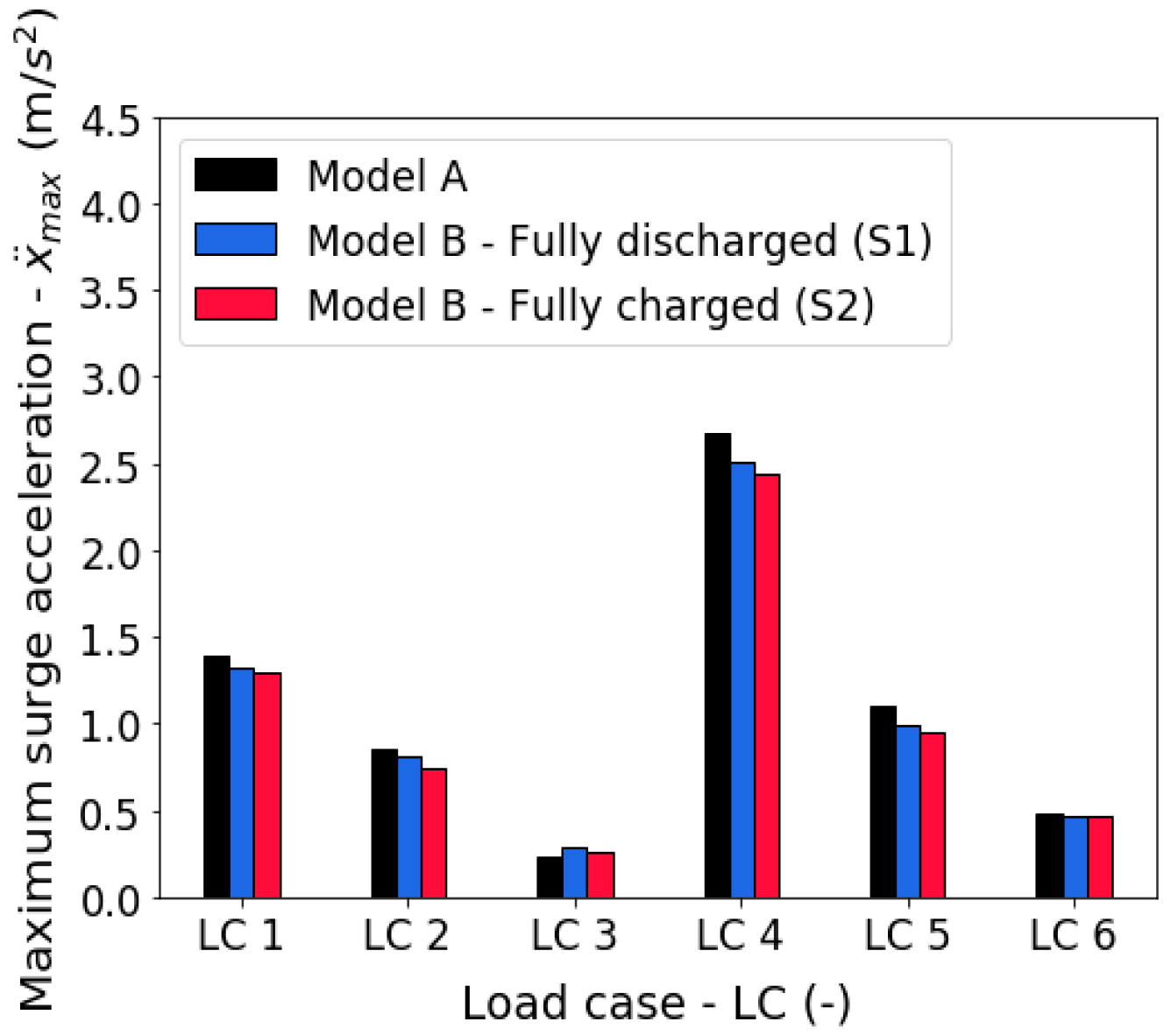
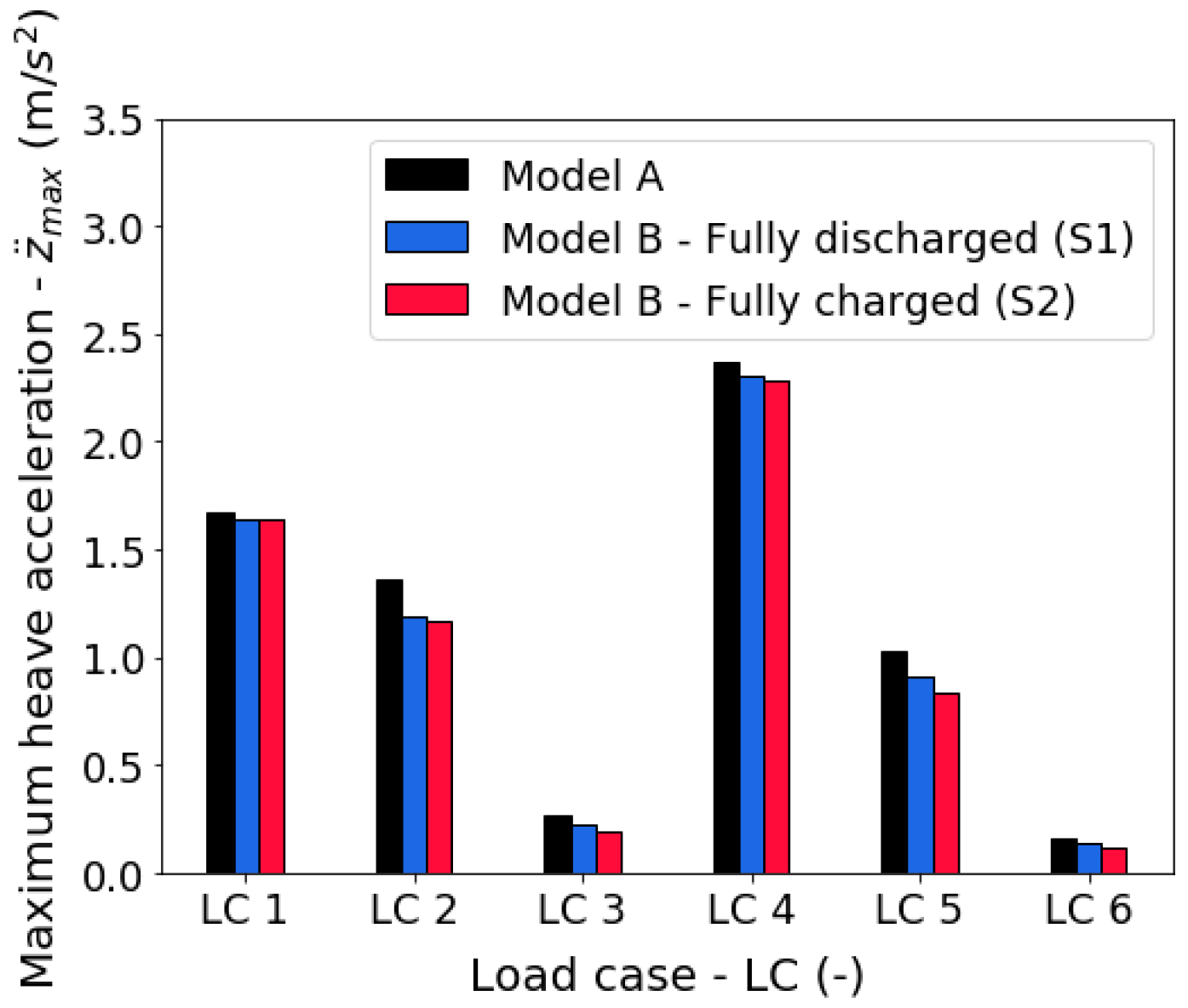
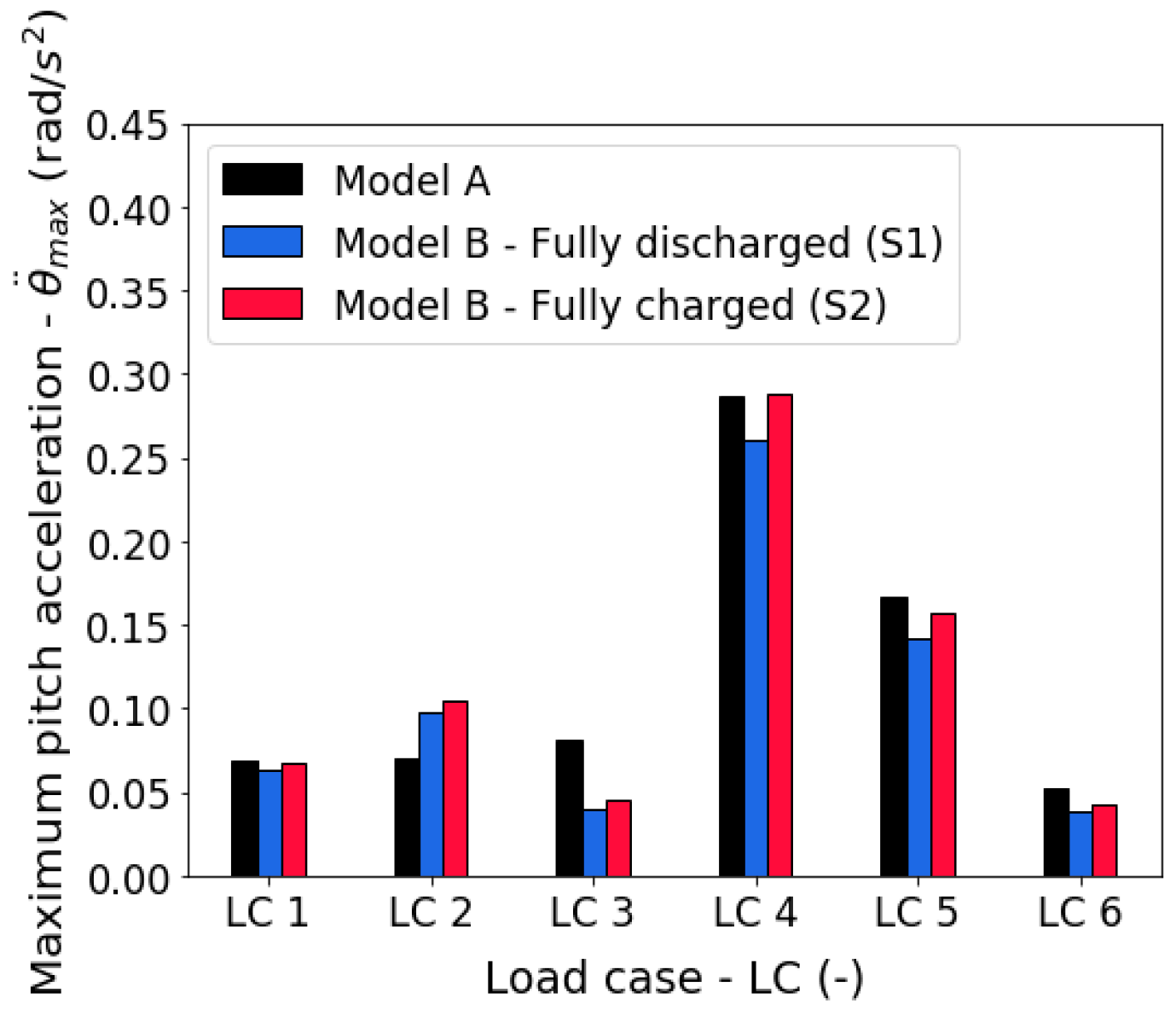
6.3.2. Accelerations
- Peak surge (i.e., lateral) accelerations of 0.30 g;
- Peak heave (i.e., vertical) accelerations of 0.25 g;
- RMS acceleration maxima of 0.1 g in both lateral and vertical directions.
7. Conclusions
- The natural periods in heave, roll and pitch of large-scale FBWs resemble the natural periods of FPSO units;
- The predicted peak lateral and peak vertical accelerations of large-scale FBWs equate to 0.30 g and 0.25 g, respectively;
- The maximum RMS accelerations in both lateral and vertical directions add up to approximately 0.10 g;
- RMS accelerations in regular wave conditions are higher than the RMS accelerations arising from irregular sea states;
- Peak accelerations in irregular wave scenarios are short-lived but are more pronounced than the maximum accelerations recorded under incident regular waves.
- The hydrostatic stability of the floating assembly is enhanced as the GMt of the hybrid system remains well above zero;
- The wave breaking efficiency, (or transmission coefficient, ), of the FBW is significantly improved by up to 47% for mid-range incident wave periods of 5 ≤ T ≤ 8 s, corresponding to the range of incident wave frequencies 1.26 rad/s;
- The presence of the ESS is likely to contribute to lower surge and heave displacements for a wide range of sea conditions;
- Contrastingly, hybrid Model B is able to provide mitigated pitch rotation relative to Model A, in calm waters only, due to a shift in the natural frequencies of the structure;
- From a hydrodynamic and stability perspective, both Model A and Model B are able to remain intact and withstand sea states up to very rough and high conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bouckaert, S.; Pales, A.F.; McGlade, C.; Remme, U.; Wanner, B. Net Zero by 2050—A Roadmap for the Global Energy Sector; Rep. IEA 2021; International Energy Agency (IEA): Paris, France, 2021; Available online: https://www.iea.org/reports/net-zero-by-2050 (accessed on 2 August 2023).
- European Council. Regulation (EU) 2021/1119 of the European Parliament and of the Council of 30 June 2021 Establishing the Framework for Achieving Climate Neutrality and Amending Regulation (EC) No. 401/2009 and (EU) 2018/1999 (‘European Climate Law’); European Union: Brussels, Belgium, 2021. [Google Scholar]
- Wiatros-Motyka, M. Global Electricity Review 2023; Rep. Ember 2023; EMBER: London, UK, 2023; Available online: https://ember-climate.org/insights/research/global-electricity-review-2023/ (accessed on 2 August 2023).
- El Houda Lamhamedi, B.; de Vries, W.T. An Exploration of the Land-(Renewable) Energy Nexus. Land 2022, 11, 767. [Google Scholar] [CrossRef]
- Gomes, J.G.; Lin, Y.; Jiang, J.; Yan, N.; Dai, S.; Yang, T. Review of Offshore Wind Projects Status: New Approach of Floating Turbines. In Proceedings of the 5th International Conference on Power and Energy Applications, Guangzhou, China, 18–20 November 2022. [Google Scholar] [CrossRef]
- Garanovic, A. EDP Inaugurates ‘Pioneering’ 5 MW Floating Solar Plant in Portugal. Offshore Energy. Available online: https://www.offshore-energy.biz/edp-inaugurates-pioneering-5mw-floating-solar-plant-in-portugal/ (accessed on 6 September 2023).
- Wang, Z.; Carriveau, R.; Ting, D.S.K.; Xiong, W.; Wang, Z. A Review of Marine Renewable Energy Storage. Int. J. Energy Res. 2019, 43, 6108–6150. [Google Scholar] [CrossRef]
- FLASC—Renewable Energy Storage. Available online: https://offshoreenergystorage.com/ (accessed on 11 August 2023).
- Vlaswinkel, B.; Ross, P.; Nelissen, M. Environmental Observations at the First Offshore Solar Farm in the North Sea. Sustainability 2023, 15, 6533. [Google Scholar] [CrossRef]
- Al-Yacouby, A.M.; Halim, E.R.; Liew, M.S. Hydrodynamic Analysis of Floating Offshore Solar Farms Subjected to Regular Waves. In Proceedings of the 5th International Conference on Mechanical, Manufacturing and Plant Engineering, Kuala Lumpur, Malaysia, 19–20 November 2019. [Google Scholar] [CrossRef]
- Elchahal, G.; Lafon, P.; Younes, R. Design Optimization of Floating Breakwater with an Interdisciplinary Fluid-Solid Structural Problem. Can. J. Civ. Eng. 2009, 36, 1732–1743. [Google Scholar] [CrossRef]
- Williams, A.N.; Lee, H.S.; Huang, Z. Floating Pontoon Breakwaters. Ocean Eng. 2000, 27, 221–240. [Google Scholar] [CrossRef]
- Huang, Z.; He, F.; Zhang, W. A Floating Box-Type Breakwater with Slotted Barriers. J. Hydraul. Res. 2014, 52, 720–727. [Google Scholar] [CrossRef]
- Neelamani, S.; Alragum, A. Hydrodynamic Performance of Floating Pontoon Type Breakwater with Skirt Walls and Different Porosity. In Proceedings of the ASME 41st International Conference on Ocean, Offshore and Arctic Engineering, Hamburg, Germany, 5–10 June 2022. [Google Scholar] [CrossRef]
- Koutandos, E.V.; Prinos, P.E. Hydrodynamic Characteristics of Semi-immersed Breakwater with an Attached Porous Plate. Ocean Eng. 2011, 38, 34–48. [Google Scholar] [CrossRef]
- Bryant, D.B.; Provost, L.A. Walter Marine and Atlantic Reefmaker Wave Attenuator; Rep. ERDC/CHL TR-22-3; U.S. Army Corps of Engineers: Vicksburg, MS, USA, 2022; Available online: https://erdc-library.erdc.dren.mil/jspui/bitstream/11681/43303/1/ERDC-CHL%20TR-22-3.pdf (accessed on 8 August 2023).
- Rocabado, I. Aquabreak (Aquaculture Living Breakwater for Coastal Protection and Sea Decarbonisation). Haedes Consultancy & Engineering. Available online: https://www.haedes.eu/aquabreak-aquaculture-living-breakwater-for-coastal-protection-and-sea-decarbonisation/ (accessed on 22 August 2023).
- Ukr-Techno, The Key to the Future. Ukr-Techno. Available online: http://ukrtechno.com/ (accessed on 11 September 2023).
- Zhao, X.L.; Ning, D.Z.; Zou, Q.P.; Qiao, D.S.; Cai, S.Q. Hybrid Floating Breakwater-WEC System: A Review. Ocean Eng. 2019, 186, 106126. [Google Scholar] [CrossRef]
- LaSalle Park Marina—Floating Breakwater. Kropf Industrial. Available online: https://kropfindustrial.com/case-study/lasalle-park-marina-floating-breakwater/ (accessed on 17 September 2023).
- SF Marina Builds Its Largest Floating Breakwater to Date. SF Marina. Available online: https://sfmarina.com/sf-marina-builds-its-largest-floating-breakwater-to-date/ (accessed on 26 September 2023).
- Pagliari Pier—La Spezia. Trevi. Available online: https://www.trevispa.com/en/projects/main-projects/pagliari-pier---la-spezia (accessed on 26 September 2023).
- Cebada-Relea, A.J.; Lopez, M.; Aenlle, M. Time-domain Numerical Modelling of the Connector Forces in a Modular Pontoon Floating Breakwater under Regular and Irregular Oblique Waves. Ocean Eng. 2022, 243, 110263. [Google Scholar] [CrossRef]
- Kusaka, T.; Ueda, S. Ujina Floating Ferry Pier and Kan-On Floating Breakwater, Japan. In Large Floating Structures, Ocean Engineering & Oceanography; Springer: Singapore, 2015; Volume 3, pp. 107–127. [Google Scholar] [CrossRef]
- Bouchet, R.; Sedillot, F.; Jaeger, J.M.; Troya, L.; Peset, L.; Martareche, F. Monaco semi-floating dyke—A 352 metre long concrete caisson. In Proceedings of the 5th Fib Symposium, Avignon, France, 26–28 May 2004. [Google Scholar]
- ISO 21650:2007; Actions from Waves and Currents on Coastal Structures. International Organization for Standardization: Geneva, Switzerland, 2007.
- Rules for High Speed, Light Craft and Naval Surface Craft; DNV-ALU STRUCTURES-HSC Part 3 Chapter 1; Det Norske Veritas: Bærum, Norway, 2011.
- International Code of Safety for High-Speed Craft—2008 Edition; 2000 HSC Code, 2008 Edition; The Maritime and Coastguard Agency: London, UK, 2008.
- ABS Guide for Passenger Comfort on Ships; American Bureau of Shipping: Houston, TX, USA, 2015.
- Freeman, L. Dynamic Motions of Piled Floating Pontoons and Their Impact on Postural Stability. Presented at the PIANC International De Paepe Willems Award, Australia, 2022; Available online: https://pianc.org.au/wp-content/uploads/2022/06/Freeman_PIANC_DePaepeAward-250522.pdf (accessed on 2 October 2023).
- Freeman, E.; Splinter, K.; Cox, R. Floating Breakwaters as Public Platforms—Impact on Postural Stability. Coast. Struct. 2018, 36, 12–30. [Google Scholar] [CrossRef]
- Cutajar, C.; Borg, A.; Sant, T.; Farrugia, R.N.; Buhagiar, D. Numerical Modelling of the Wave Attenuation of Floating Breakwaters in Deep Waters. In Proceedings of the 7th Offshore Energy and Storage Summit, St. Julian’s, Malta, 12–14 July 2023. [Google Scholar] [CrossRef]
- ANSYS Inc. Aqwa Theory Manual: Release 2022 R1; ANSYS, Inc.: Canonsburg, PA, USA, 2022. [Google Scholar]
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Holthuijsen, L.H. Waves in Oceanic and Coastal Waters; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Environmental Conditions and Environmental Loads; DNVGL-RP-C205; Det Norske Veritas: Bærum, Norway, 2019.
- Cui, J.; Liu, H.; Deng, X.; Tao, S.; Li, Q. An Experimental Study on Hydrodynamic Performance of a Box-floating Breakwater in Different Terrains. J. Mar. Sci. Technol. 2020, 25, 991–1009. [Google Scholar] [CrossRef]
- Rajabi, M.; Ghassemi, H. Hydrodynamic Performance Improvement of Double-Row Floating Breakwaters by Changing the Cross-Sectional Geometry. Math. Probl. Eng. 2021, 2021, 2944466. [Google Scholar] [CrossRef]
- Multiple Use of Space for Island Clean Autonomy. Musica Project. Available online: https://musica-project.eu/ (accessed on 22 August 2023).
- Cutajar, C.; Sant, T.; Farrugia, R.N.; Buhagiar, D. A Software Tool for the Design and Operational Analysis of Pressure Vessels Used in Offshore Hydro-Pneumatic Energy Storage. J. Energy Storage 2021, 40, 102750. [Google Scholar] [CrossRef]
- EN 13445-2:2014; Unfired Pressure Vessels—Part 2: Materials. European Committee for Standardization: Brussels, Belgium, 2014.
- EN 13445-3:2014; Unfired Pressure Vessels—Part 3: Design. European Committee for Standardization: Brussels, Belgium, 2014.
- EN 13445-5:2014/A1:2018; Unfired Pressure Vessels—Part 5: Inspection and Testing. European Committee for Standardization: Brussels, Belgium, 2018.
- Specification for Line Pipe, API Specification 5L 46th ed.; American Petroleum Institute: Washington, DC, USA, 2018.
- European Commission. Directive, 2014/68/EU of the European Parliament and of the Council of 15 May 2014 on the Harmonisation of the Laws of the Member States Relating to the Making Available on the Market of Pressure Equipment; European Union: Brussels, Belgium, 2014. [Google Scholar]
- Global Performance Analysis of Deepwater Floating Structures; DNVGL-RP-F205; Det Norske Veritas: Bærum, Norway, 2017.
- Hales, L.Z. Floating Breakwaters: State-of-the-Art Literature Review; Rep. 81-1; U.S. Army Corps of Engineers: Norfolk, VA, USA, 1981. [Google Scholar]
- Position Mooring; DNVGL-OS-E301; Det Norske Veritas: Bærum, Norway, 2018.
- ABS Guide for Position Mooring Systems; American Bureau of Shipping: Houston, TX, USA, 2018.
- Manual on Codes, International Codes, 2019 ed.; World Meteorological Organization: Geneva, Switzerland, 2019; Volume I.1.
- Duarte, T.; Gueydon, S.; Jonkman, J.; Sarmento, A. Computation of Wave Loads under Multidirectional Sea States for Floating Offshore Wind Turbines. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar] [CrossRef]
- Solving Complex, Real-World Problems. BMT. Available online: https://www.bmt.org/ (accessed on 24 August 2023).
- De Leo, F.; Besio, G.; Mentaschi, L. Trends and Variability of Ocean Waves under RCP8.5 Emission Scenario in the Mediterranean Sea. Ocean Dyn. 2021, 71, 97–117. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Baseline Model A | Hybrid Model B | |
|---|---|---|---|
| HPES system (-) | No | Yes | Yes |
| State of charge (-) | - | S1 | S2 |
| (m) | 150 | 150 | 150 |
| (m) | 18 | 18 | 18 |
| (m) | 11.90 | 11.90 | 11.90 |
| Wall thickness—t1 (m) | 0.30 | 0.30 | 0.30 |
| Wall thickness—t2 (m) | 0.20 | 0.20 | 0.20 |
| Wall thickness—t3 (m) | 1.90 | 1.90 | 1.90 |
| Water-plane (m2) | 2700 | 2700 | 2700 |
| (m) | 5.72 | 5.46 | 5.04 |
| (m) | 6.19 | 6.43 | 6.86 |
| (m) | 6.19 | 12.53 | 12.96 |
| (m3) | 16,700 | 19,600 | 20,700 |
| (t) | 17,120 | 20,050 | 21,220 |
| Distance from MSL to Centre of Buoyancy (CoB)—OB (m) | 3.09 | 4.01 | 4.20 |
| Distance from MSL to Centre of Gravity (CoG)—OG (m) | 3.33 | 3.47 | 4.27 |
| Transverse metacentric height—GMt (m) | 4.61 | 3.19 | 3.59 |
| (kg m2) | 3.23 × 1010 | 3.33 × 1010 | 3.58 × 1010 |
| (kg m2) | 6.64 × 108 | 1.32 × 109 | 1.67 × 109 |
| (kg m2) | 3.26 × 1010 | 3.29 × 1010 | 3.51 × 1010 |
| (s) | 7.27 | 7.56 | 7.69 |
| (s) | 7.10 | 7.20 | 7.33 |
| (s) | 6.82 | 8.38 | 8.01 |
| Parameter | Value |
|---|---|
| (MWh) | 3.84 |
| (m3) | 1901 |
| (t) | 181 |
| (-) | 2.50 |
| Pre-charged (bar) | 80 |
| (bar) | 200 |
| (bar) | 220 |
| Parameter | Value |
|---|---|
| (-) | 8 |
| (m) | 150 |
| (m) | 1.524 |
| (m) | 1.423 |
| (m) | 0.050 |
| (m) | 0.003 |
| (t) | 2304 |
| (%) | 5 |
| (-) | 1.70 |
| Parameter | Value |
|---|---|
| Nominal chain diameter (m) | 0.171 |
| Angle with seabed (°) | 0 |
| Anchoring depth (m) | 200 |
| Un-stretched cable length for corner lines (x4) (m) | 1420 |
| Un-stretched cable length for middle lines (x2) (m) | 1231 |
| Pre-tension per cable (kN) | 4800 |
| Transverse drag coefficient (-) [48] | 2.40 |
| Longitudinal drag coefficient (-) [48] | 1.15 |
| Safety factor under normal conditions (-) [49] | 1.67 |
| Maximum allowable load under normal conditions (kN) | 15,000 |
| Load Case (-) | Wave Type (-) | Wave Height H (m) | Wave Period T (s) | WMO Code (-) [50] | Sea State (-) [50] |
|---|---|---|---|---|---|
| 1 | Regular | 7.7 | 10.5 | 7 | High |
| 2 | Regular | 3.1 | 7.5 | 5 | Rough |
| 3 | Regular | 1.5 | 5.5 | 4 | Moderate |
| 4 | Irregular | 4.5 | 8.5 | 6 | Very rough |
| 5 | Irregular | 2.2 | 6.5 | 4 | Moderate |
| 6 | Irregular | 1.1 | 4.5 | 3 | Slight |
| DoF | Acceleration (g) | Model A | Model B (S1) | Model B (S2) | Difference (%) |
|---|---|---|---|---|---|
| Surge (X) | Peak— | 0.141 | 0.135 | 0.132 | −5.451 |
| RMS— | 0.095 | 0.091 | 0.089 | −4.979 | |
| Heave (Z) | Peak— | 0.170 | 0.167 | 0.167 | −1.962 |
| RMS— | 0.101 | 0.102 | 0.103 | +1.567 |
| DoF | Acceleration (g) | Model A | Model B (S1) | Model B (S2) | Difference (%) |
|---|---|---|---|---|---|
| Surge (X) | Peak— | 0.272 | 0.255 | 0.248 | −7.530 |
| RMS— | 0.022 | 0.021 | 0.020 | −7.584 | |
| Heave (Z) | Peak— | 0.242 | 0.235 | 0.233 | −3.501 |
| RMS— | 0.025 | 0.024 | 0.024 | −3.698 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cutajar, C.; Sant, T.; Farrugia, R.N.; Buhagiar, D. Analysis of the Wave Attenuating and Dynamic Behaviour of a Floating Breakwater Integrating a Hydro-Pneumatic Energy Storage System. J. Mar. Sci. Eng. 2023, 11, 2189. https://doi.org/10.3390/jmse11112189
Cutajar C, Sant T, Farrugia RN, Buhagiar D. Analysis of the Wave Attenuating and Dynamic Behaviour of a Floating Breakwater Integrating a Hydro-Pneumatic Energy Storage System. Journal of Marine Science and Engineering. 2023; 11(11):2189. https://doi.org/10.3390/jmse11112189
Chicago/Turabian StyleCutajar, Charise, Tonio Sant, Robert N. Farrugia, and Daniel Buhagiar. 2023. "Analysis of the Wave Attenuating and Dynamic Behaviour of a Floating Breakwater Integrating a Hydro-Pneumatic Energy Storage System" Journal of Marine Science and Engineering 11, no. 11: 2189. https://doi.org/10.3390/jmse11112189