
Yard Space Allocation Algorithm for Unloading Containers at Marine Terminals

Abstract
:1. Introduction
2. Literature Review
2.1. Optimization Objectives
2.2. Optimization Methods
2.3. Result Analysis
2.4. Summary
3. Mathematical Models
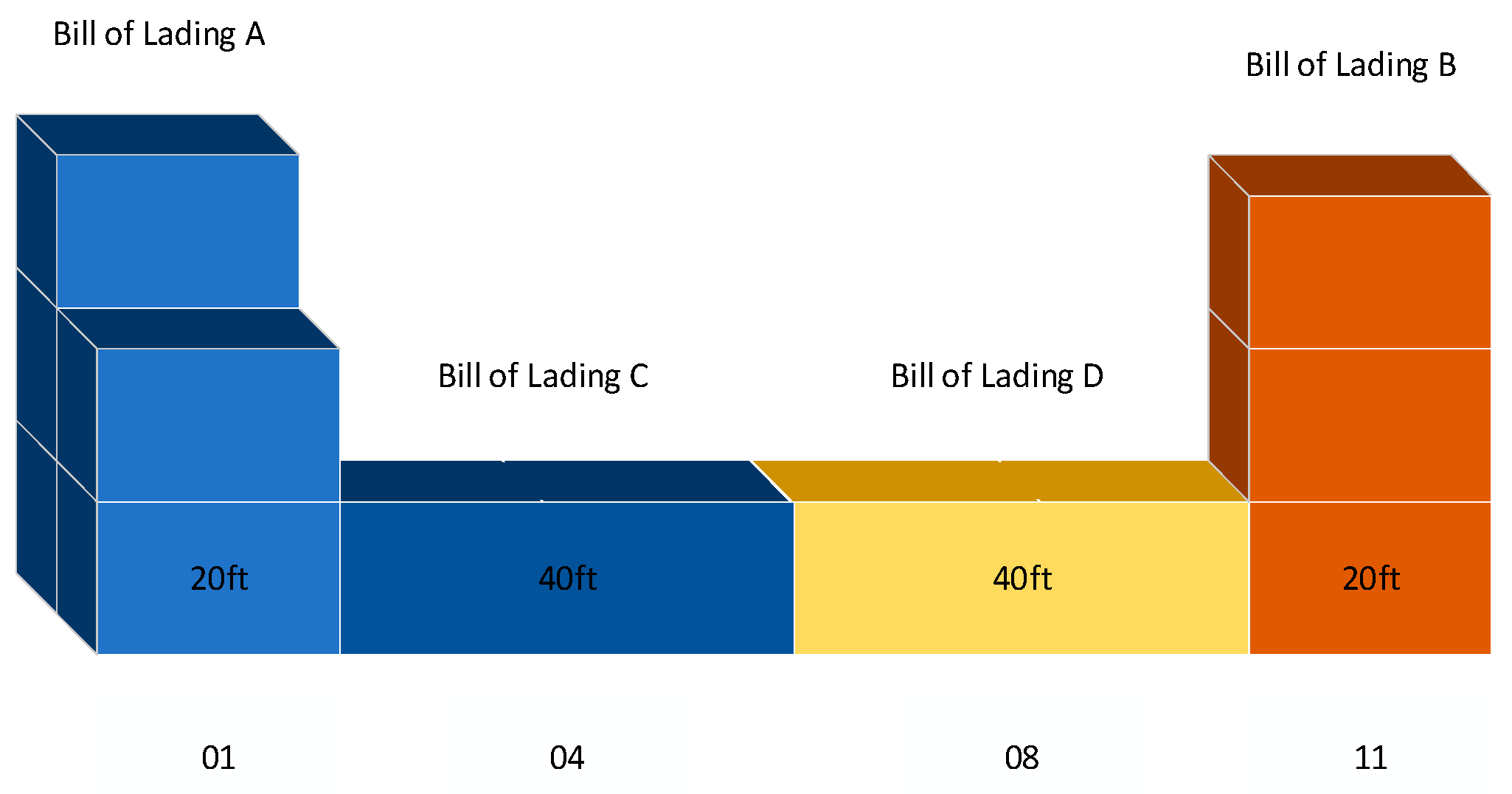
3.1. Problem Description
3.2. Assumptions
- (1)
- Containers entering and exiting the port yard are stored separately.
- (2)
- Due to the fact that special containers need to be stored in special container zones within the yard, and the majority of containers are standard containers, this study considers only standard containers and does not account for other container types.
- (3)
- The distribution of available capacity for yard slots during the planned period and the workload for each operational row in the yard are known.
- (4)
- During the loading and unloading operations, issues such as mechanical breakdowns are not considered, assuming that all process steps can function normally.
- (5)
- The yard does not pre-reserve flip slots for each operational row. When a particular row requires a flip slot, the slot is locked for that purpose.
3.3. Symbol Definitions
- (1)
- Model Dimensions
- (2)
- Model parameters
- (3)
- Decision variables
3.4. Model Construction
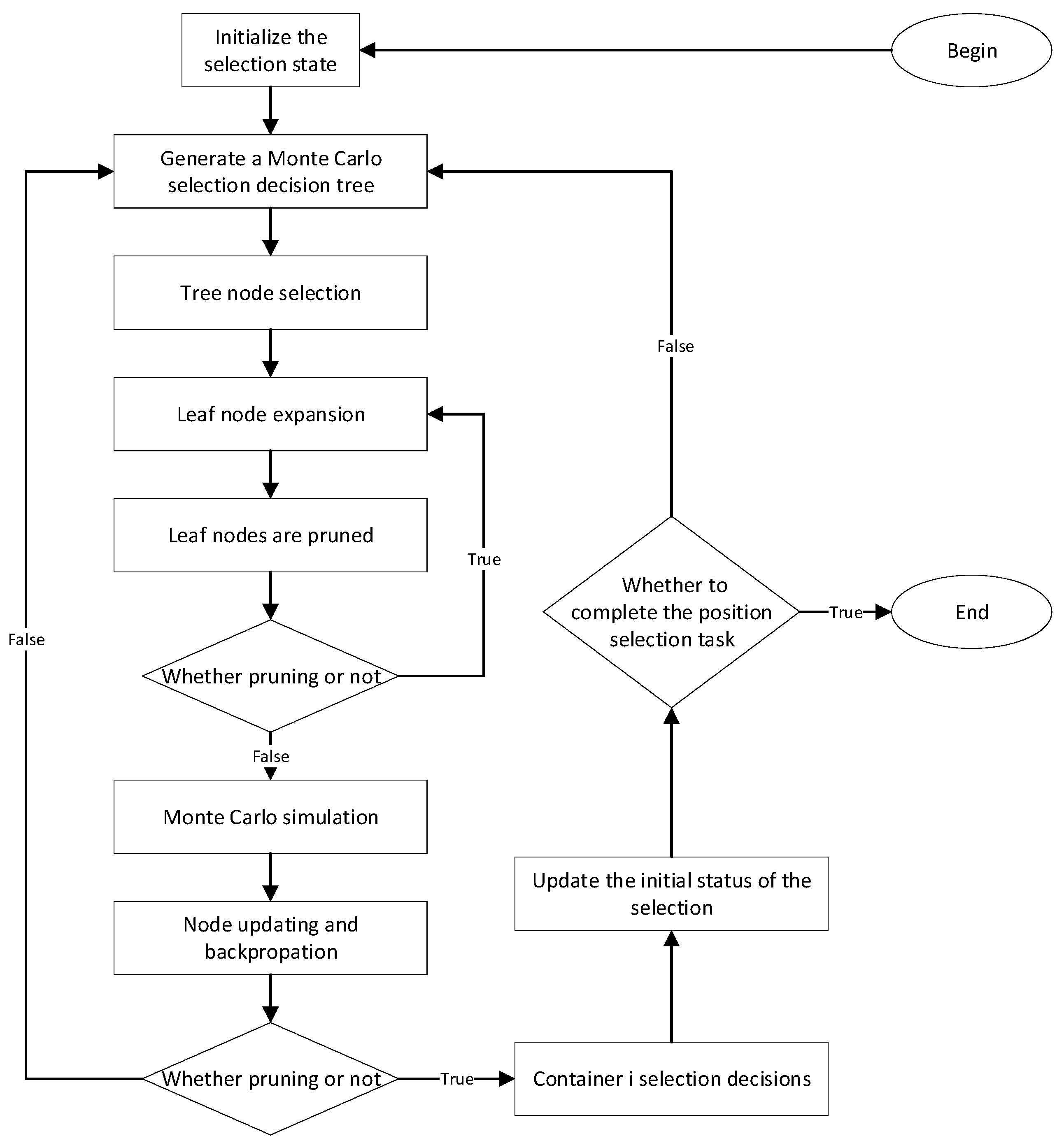
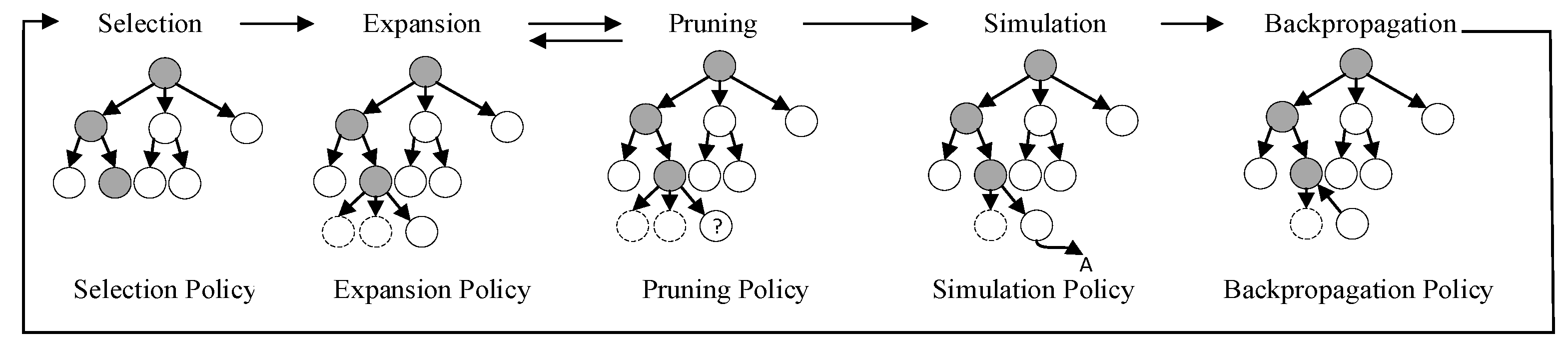
4. Algorithm Design
4.1. Selection Policy
- (1)
- UCT algorithm
- (2)
- AMAF algorithm
- (3)
- RAVE algorithm
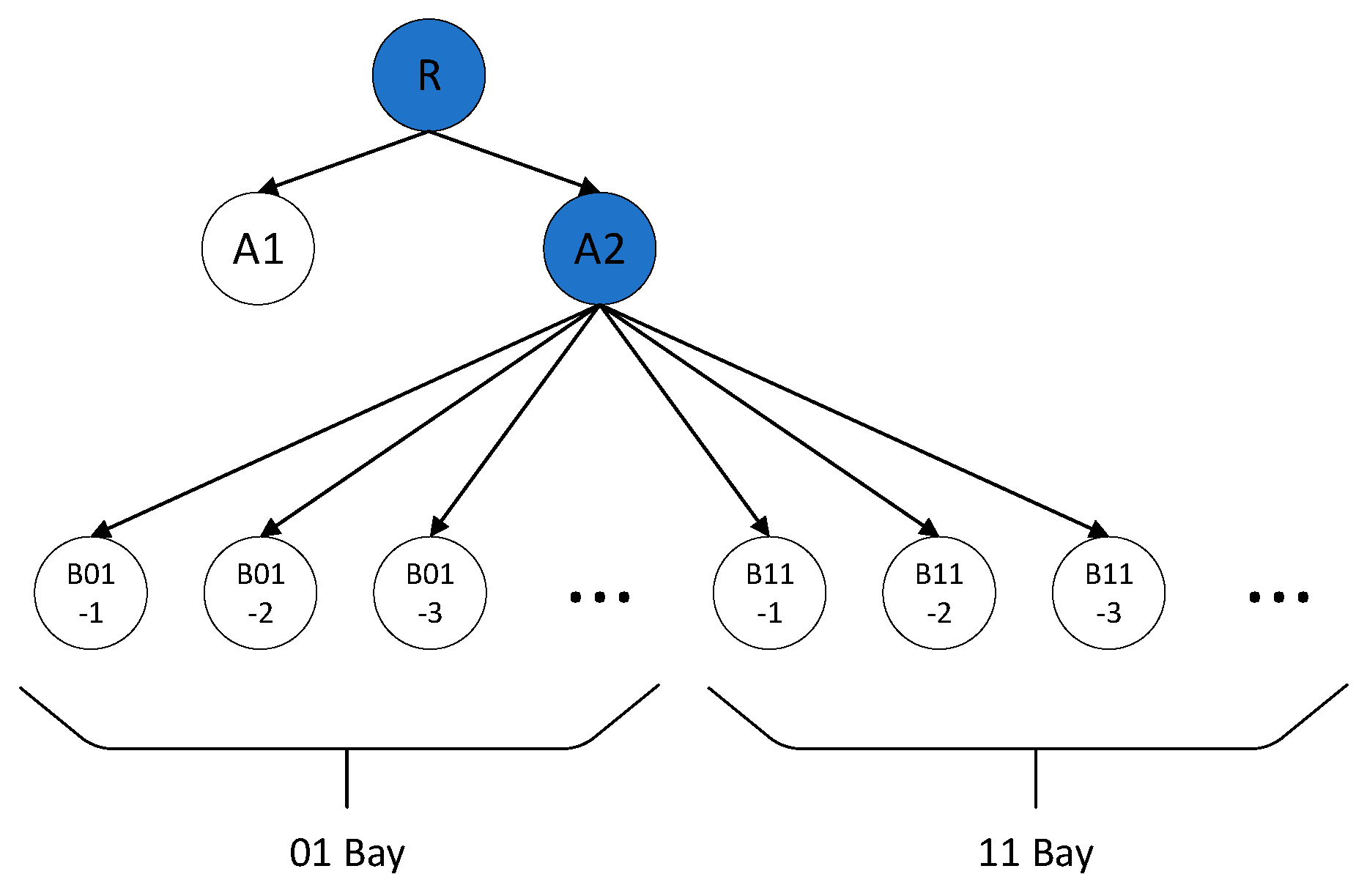
4.2. Expansion Policy
4.3. Pruning Policy
4.4. Simulation Policy
4.5. Backtracking Policy
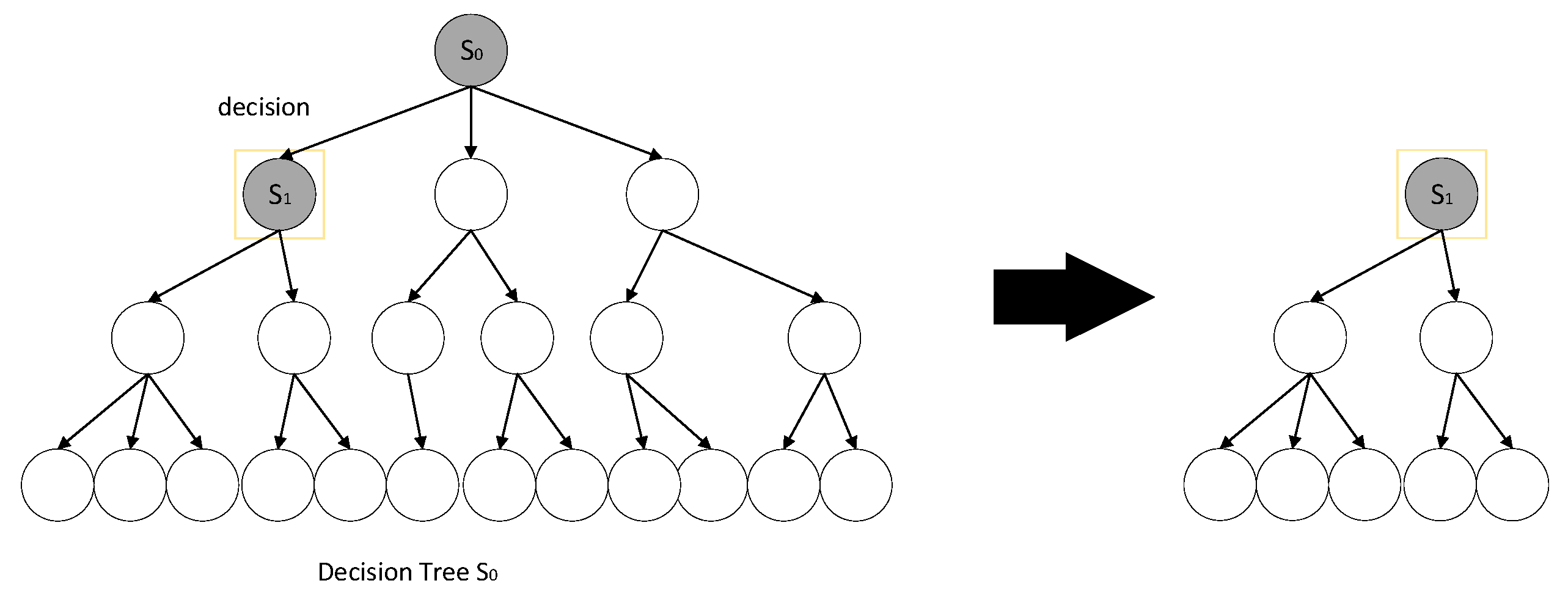
4.6. Nested Tree Policy
5. Experiments
5.1. Experimental Platform
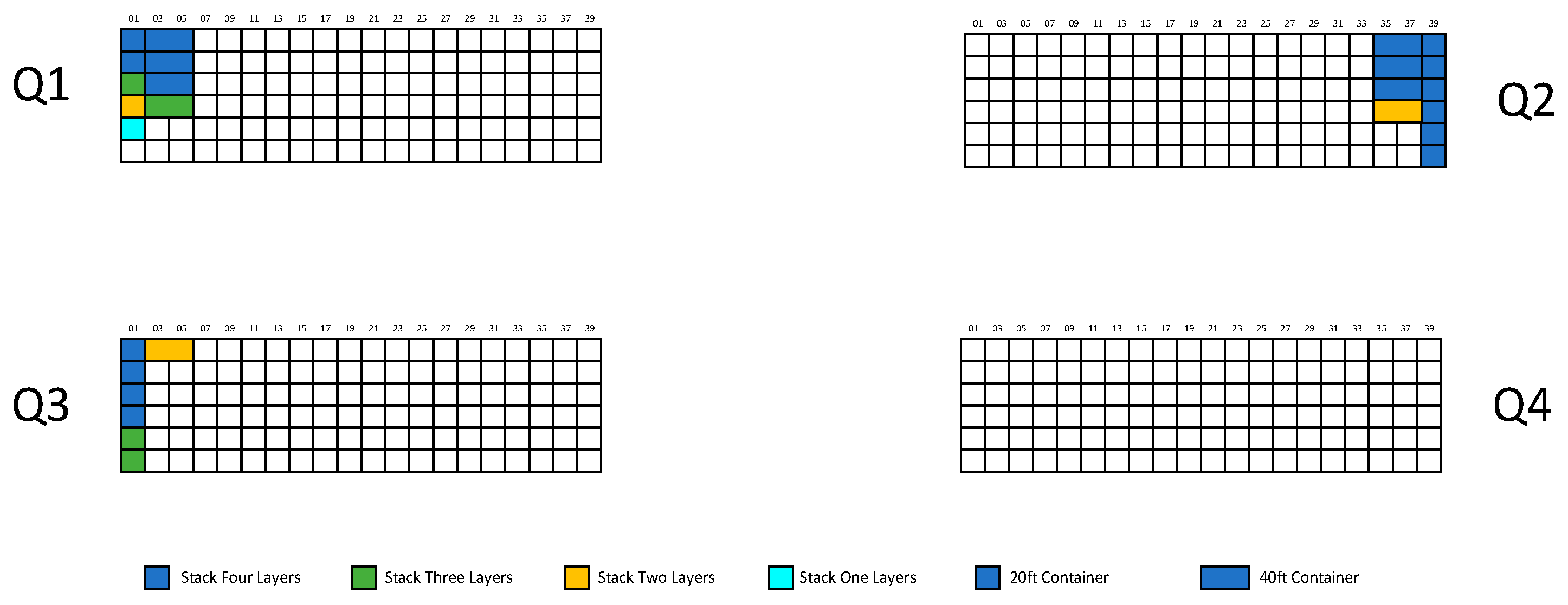
5.2. Experimental Data
5.3. Calculation of Experimental Results
5.3.1. Comparative Analysis of Manual Allocation Solution Results
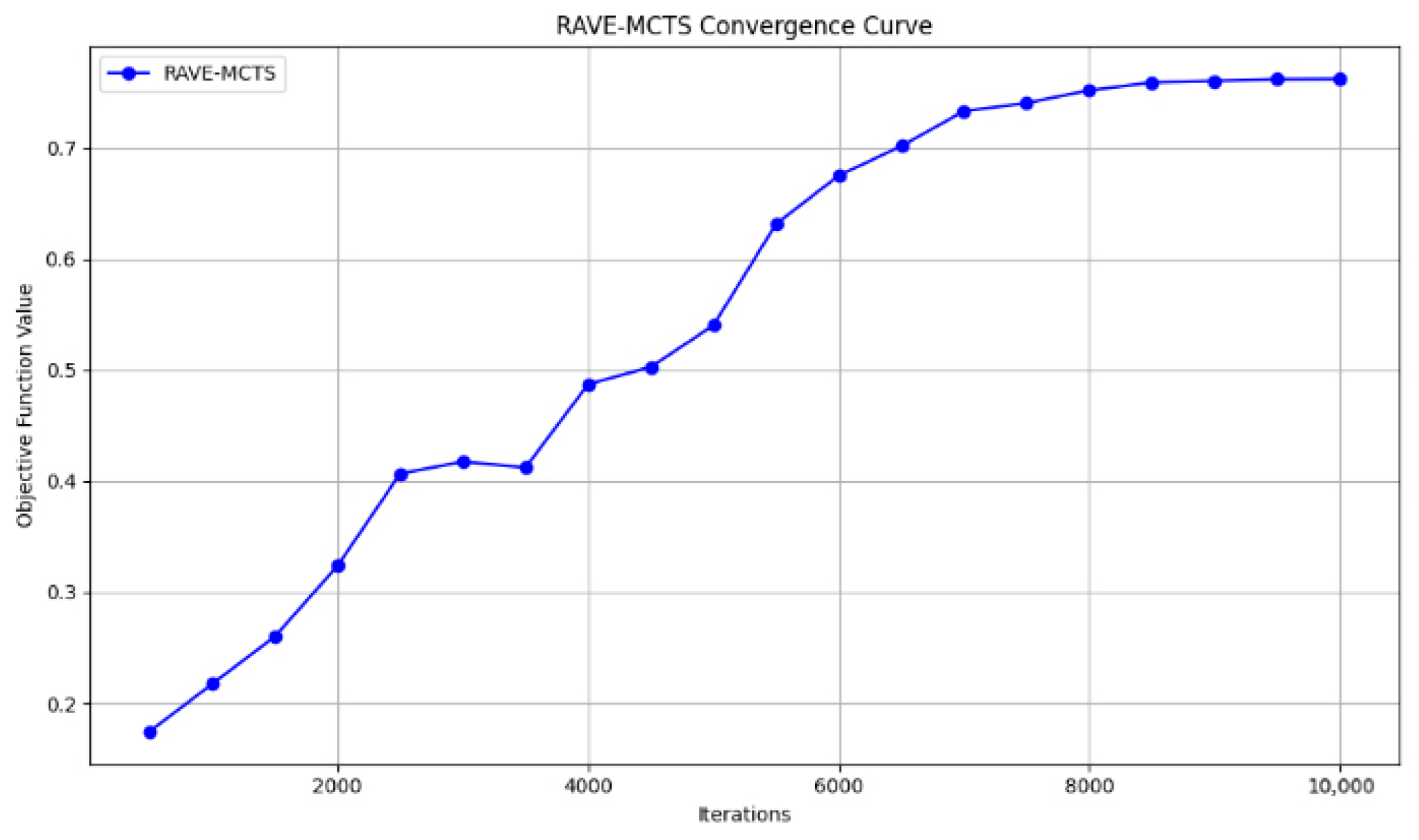
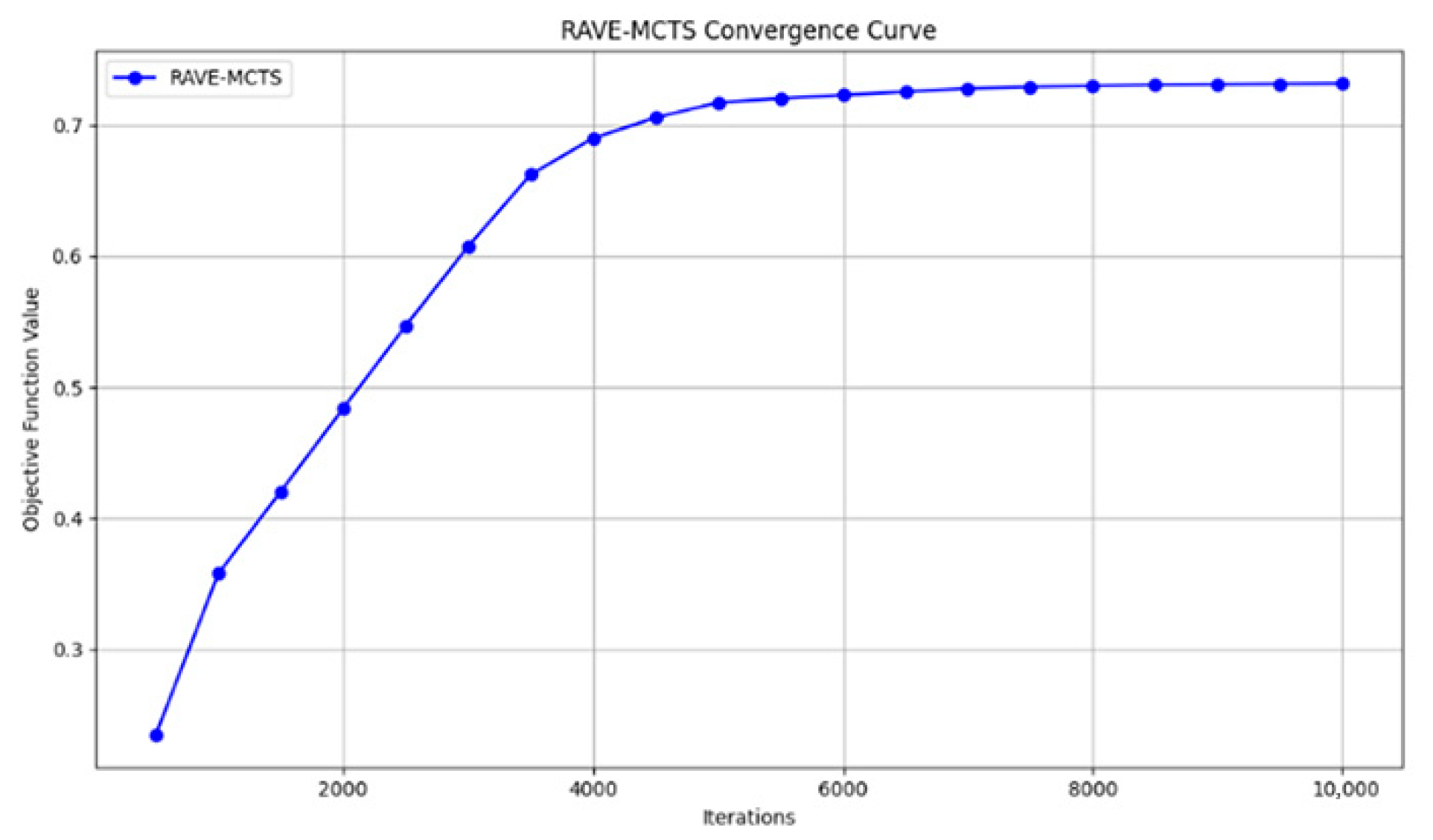
5.3.2. Algorithm Convergence Analysis
5.3.3. Algorithm Effectiveness Analysis
5.3.4. Algorithm Robustness Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stahlbock, R.; Voß, S. Operations research at container terminals: A literature update. OR Spectr. 2008, 30, 1–52. [Google Scholar] [CrossRef]
- Wen, W.; Fan, H.; Zhang, W.; Ma, M.; Li, Y. Simulating the growth of container ship size and port city economy development. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 2574–2579. [Google Scholar] [CrossRef]
- Dulebenets, M.A. Application of evolutionary computation for berth scheduling at marine container terminals: Parameter tuning versus parameter control. IEEE Trans. Intelligent. Transp. Syst. 2017, 19, 25–37. [Google Scholar] [CrossRef]
- Jin, J.G.; Lee, D.H.; Cao, J.X. Storage Yard Management in Maritime Container Terminals. Transp. Sci. 2016, 50, 1300–1313. [Google Scholar] [CrossRef]
- Mi, C.; Liu, Y.; Zhang, Y.; Wang, J.; Feng, Y.; Zhang, Z. A Vision-based Displacement Measurement System for Foundation Pit. IEEE Trans. Instrum. Meas. 2023, 72, 2525715. [Google Scholar] [CrossRef]
- Mi, C.; Huang, S.; Zhang, Y.; Zhang, Z.; Postolache, O. Design and Implementation of 3-D Measurement Method for Container Handling Target. J. Mar. Sci. Eng. 2022, 10, 1961. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, Y.; Zhang, Z.; Postolache, O.; Mi, C. A vision-based container position measuring system for ARMG. Meas. Control 2023, 56, 596–605. [Google Scholar] [CrossRef]
- Yu, H.; Deng, Y.; Zhang, L.; Xiao, X.; Tan, C. Yard Operations and Management in Automated Container Terminals: A Review. Sustainability 2022, 14, 3419. [Google Scholar] [CrossRef]
- Kizilay, D.; Eliiyi, D.T. A comprehensive review of quay crane scheduling, yard operations and integrations thereof in container terminals. Flex. Serv. Manuf. J. 2021, 33, 1–42. [Google Scholar] [CrossRef]
- Zhang, C.; Guan, H.; Yuan, Y.; Chen, W.; Wu, T. Machine learning-driven algorithms for the container relocation problem. Transp. Res. Part B 2020, 139, 102–131. [Google Scholar] [CrossRef]
- Yu, H.; Huang, M.; Zhang, L.; Tan, C. Yard template generation for automated container terminal based on bay sharing strategy. Ann. Oper. Res. 2022. [Google Scholar] [CrossRef]
- Fan, H.; Peng, W.; Ma, M.; Yue, L. Storage Space Allocation and Twin Automated Stacking Cranes Scheduling in Automated Container Terminals. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14336–14348. [Google Scholar] [CrossRef]
- Ambrosino, D.; Xie, H. Optimization approaches for defining storage strategies in maritime container terminals. Soft Comput. 2023, 27, 4125–4137. [Google Scholar] [CrossRef]
- Niu, B.; Xie, T.; Tan, L.; Bi, Y.; Wang, Z. Swarm intelligence algorithms for Yard Truck Scheduling and Storage Allocation Problems. Neurocomputing 2016, 188, 284–293. [Google Scholar] [CrossRef]
- Bruns, F.; Knust, S.; Shakhlevich, N.V. Complexity results for storage loading problems with stacking constraints. Eur. J. Oper. Res. 2016, 249, 1074–1081. [Google Scholar] [CrossRef]
- Petering, M.E.H.; Hussein, M.I. A new mixed integer program and extended look-ahead heuristic algorithm for the block relocation problem. Eur. J. Oper. Res. 2013, 231, 120–130. [Google Scholar] [CrossRef]
- Yu, M.; Liang, Z.; Teng, Y.; Zhang, Z.; Cong, X. The inbound container space allocation in the automated container terminals. Expert Syst. Appl. 2021, 179, 115014. [Google Scholar] [CrossRef]
- Zhen, L.; Zhuge, D.; Wang, S.; Wang, K. Integrated berth and yard space allocation under uncertainty. Transp. Res. Part B 2022, 162, 1–27. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, C.; Zheng, L. A bi-objective model for robust yard allocation scheduling for outbound containers. Eng. Optim. 2016, 49, 113–135. [Google Scholar] [CrossRef]
- Luo, J.; Wu, Y.; Mendes, A.B. Modelling of integrated vehicle scheduling and container storage problems in unloading process at an automated container terminal. Comput. Ind. Eng. 2016, 94, 32–44. [Google Scholar] [CrossRef]
- Wu, K.; Ting, C. A beam search algorithm for minimizing reshuffle operations at container yards. In Proceedings of the International Conference on Logistics and Maritime Systems, Busan, Republic of Korea, 15–17 September 2010. [Google Scholar] [CrossRef]
- Hu, W.; Wang, H.; Min, Z. A storage allocation algorithm for outbound containers based on the outer-inner cellular automaton. Inf. Sci. 2014, 281, 147–171. [Google Scholar] [CrossRef]
- Galle, V.; Barnhart, C.; Jaillet, P. Yard crane scheduling for container storage, retrieval, and relocation. Eur. J. Oper. Res. 2018, 271, 288–316. [Google Scholar] [CrossRef]
- Wang, K.; Zhen, L.; Wang, S.; Laporte, G. Column generation for the integrated berth allocation, quay crane assignment, and yard assignment problem. Transp. Sci. 2018, 52, 812–834. [Google Scholar] [CrossRef]
- Rimmel, A.; Teytaud, F.; Teytaud, O. Biasing Monte-Carlo simulations through RAVE values. In International Conference on Computers and Games; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2011; Volume 6515, pp. 59–68. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Value | 0.4 | 0.6 | 0.4 | 0.6 | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 |
| Container Number | Containers Size | Containers Type | Containers Status | Bill of Lading | Unloading Sequence |
|---|---|---|---|---|---|
| CARU2728930 | 20 | GP | loaded | A | 1 |
| GLDU3749610 | 20 | GP | loaded | A | 2 |
| MEDU1453684 | 20 | GP | loaded | A | 3 |
| GATU0579972 | 20 | GP | loaded | A | 4 |
| FBLU2025567 | 20 | GP | loaded | D | 5 |
| INKU6569676 | 40 | GP | loaded | D | 6 |
| MEDU1770544 | 20 | GP | loaded | D | 7 |
| MEDU1782360 | 20 | GP | loaded | F | 8 |
| CLHU3763693 | 20 | GP | loaded | F | 9 |
| GATU1126570 | 20 | GP | loaded | E | 10 |
| GLDU5246641 | 20 | GP | loaded | E | 11 |
| MEDU1705507 | 20 | GP | loaded | E | 12 |
| CATU2912820 | 20 | GP | loaded | C | 13 |
| CRXU1163607 | 20 | GP | loaded | C | 14 |
| GATU0714619 | 20 | GP | loaded | C | 15 |
| GLDU3647877 | 20 | GP | loaded | C | 16 |
| IPXU3977733 | 20 | GP | loaded | C | 17 |
| MEDU1527895 | 20 | GP | loaded | C | 18 |
| MEDU1652304 | 20 | GP | loaded | C | 19 |
| CARU2151745 | 20 | GP | loaded | C | 20 |
| Container Number | Container Size | Container Type | Container Status | Bill of Lading | Unloading Sequence | Yard Slots |
|---|---|---|---|---|---|---|
| CARU2728930 | 20 | GP | loaded | A | 1 | Q10161 |
| GLDU3749610 | 20 | GP | loaded | A | 2 | Q10162 |
| MEDU1453684 | 20 | GP | loaded | A | 3 | Q10163 |
| GATU0579972 | 20 | GP | loaded | A | 4 | Q10164 |
| FBLU2025567 | 20 | GP | loaded | D | 5 | Q23311 |
| INKU6569676 | 40 | GP | loaded | D | 6 | Q23651 |
| MEDU1770544 | 20 | GP | loaded | D | 7 | Q23312 |
| MEDU1782360 | 20 | GP | loaded | F | 8 | Q23313 |
| CLHU3763693 | 20 | GP | loaded | F | 9 | Q23314 |
| GATU1126570 | 20 | GP | loaded | E | 10 | Q10711 |
| GLDU5246641 | 20 | GP | loaded | E | 11 | Q10712 |
| MEDU1705507 | 20 | GP | loaded | E | 12 | Q10713 |
| CATU2912820 | 20 | GP | loaded | C | 13 | Q23321 |
| CRXU1163607 | 20 | GP | loaded | C | 14 | Q23322 |
| GATU0714619 | 20 | GP | loaded | C | 15 | Q23323 |
| GLDU3647877 | 20 | GP | loaded | C | 16 | Q23324 |
| IPXU3977733 | 20 | GP | loaded | C | 17 | Q23331 |
| MEDU1527895 | 20 | GP | loaded | C | 18 | Q23332 |
| MEDU1652304 | 20 | GP | loaded | C | 19 | Q23333 |
| CARU2151745 | 20 | GP | loaded | C | 20 | Q23334 |
| Container Number | Container Size | Container Type | Container Status | Bill of Lading | Unloading Sequence | Yard Slots |
|---|---|---|---|---|---|---|
| CARU2728930 | 20 | GP | loaded | A | 1 | Q10161 |
| GLDU3749610 | 20 | GP | loaded | A | 2 | Q10162 |
| MEDU1453684 | 20 | GP | loaded | A | 3 | Q10163 |
| GATU0579972 | 20 | GP | loaded | A | 4 | Q10164 |
| FBLU2025567 | 20 | GP | loaded | D | 5 | Q23311 |
| INKU6569676 | 40 | GP | loaded | D | 6 | Q23651 |
| MEDU1770544 | 20 | GP | loaded | D | 7 | Q23312 |
| MEDU1782360 | 20 | GP | loaded | F | 8 | Q23313 |
| CLHU3763693 | 20 | GP | loaded | F | 9 | Q23314 |
| GATU1126570 | 20 | GP | loaded | E | 10 | Q10711 |
| GLDU5246641 | 20 | GP | loaded | E | 11 | Q10712 |
| MEDU1705507 | 20 | GP | loaded | E | 12 | Q10713 |
| CATU2912820 | 20 | GP | loaded | C | 13 | Q23314 |
| CRXU1163607 | 20 | GP | loaded | C | 14 | Q23321 |
| GATU0714619 | 20 | GP | loaded | C | 15 | Q23322 |
| GLDU3647877 | 20 | GP | loaded | C | 16 | Q23323 |
| IPXU3977733 | 20 | GP | loaded | C | 17 | Q23324 |
| MEDU1527895 | 20 | GP | loaded | C | 18 | Q23331 |
| MEDU1652304 | 20 | GP | loaded | C | 19 | Q23332 |
| CARU2151745 | 20 | GP | loaded | C | 20 | Q23333 |
| Algorithm | UCT-MCTS | AMAF-MCTS | RAVE-MCTS | |
|---|---|---|---|---|
| Number of Iterations | ||||
| 500 | 0.1246 | 0.1835 | 0.1748 | |
| 1000 | 0.1944 | 0.2964 | 0.2176 | |
| 1500 | 0.2433 | 0.3236 | 0.2603 | |
| 2000 | 0.2926 | 0.3578 | 0.3238 | |
| 2500 | 0.3975 | 0.3970 | 0.4068 | |
| 3000 | 0.4312 | 0.4298 | 0.4174 | |
| 3500 | 0.4589 | 0.4583 | 0.4122 | |
| 4000 | 0.4762 | 0.4835 | 0.4872 | |
| 4500 | 0.4919 | 0.5012 | 0.5027 | |
| 5000 | 0.5220 | 0.5122 | 0.5402 | |
| 5500 | 0.5387 | 0.5346 | 0.6314 | |
| 6000 | 0.5421 | 0.5781 | 0.6749 | |
| 6500 | 0.5619 | 0.5927 | 0.7015 | |
| 7000 | 0.5884 | 0.6122 | 0.7329 | |
| 7500 | 0.5917 | 0.6231 | 0.7402 | |
| 8000 | 0.5968 | 0.6388 | 0.7516 | |
| 8500 | 0.5981 | 0.6419 | 0.7588 | |
| 9000 | 0.5998 | 0.6431 | 0.7601 | |
| 9500 | 0.6019 | 0.6544 | 0.7615 | |
| 10,000 | 0.6027 | 0.6576 | 0.7618 | |
| Manual Scheduling | Intelligent Algorithms | |
|---|---|---|
| Bit Selection Time (s) | 1167 | 528 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Zhao, N.; Mi, C. Yard Space Allocation Algorithm for Unloading Containers at Marine Terminals. J. Mar. Sci. Eng. 2023, 11, 2109. https://doi.org/10.3390/jmse11112109
Wang X, Zhao N, Mi C. Yard Space Allocation Algorithm for Unloading Containers at Marine Terminals. Journal of Marine Science and Engineering. 2023; 11(11):2109. https://doi.org/10.3390/jmse11112109
Chicago/Turabian StyleWang, Xingyu, Ning Zhao, and Chao Mi. 2023. "Yard Space Allocation Algorithm for Unloading Containers at Marine Terminals" Journal of Marine Science and Engineering 11, no. 11: 2109. https://doi.org/10.3390/jmse11112109