
Adaptive Formation Control of Multiple Underactuated Autonomous Underwater Vehicles


Abstract
:1. Introduction
2. Preliminaries
2.1. Vehicles Kinematics and Dynamics
2.2. Spherical Coordinates
2.3. Nonlinear Dynamics Approximation
3. Formation Rules
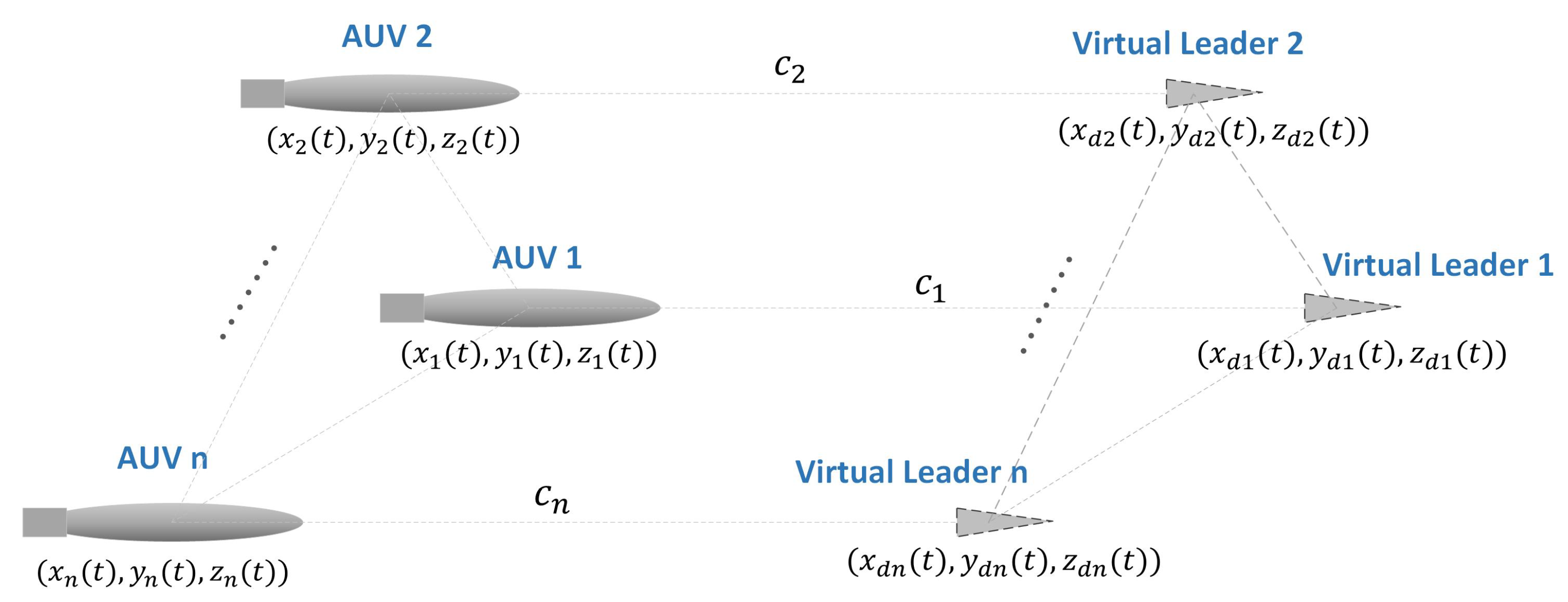
3.1. Virtual School
3.2. Trajectory Following
3.3. Obstacle Detection and Avoidance
4. Formation Controller Design
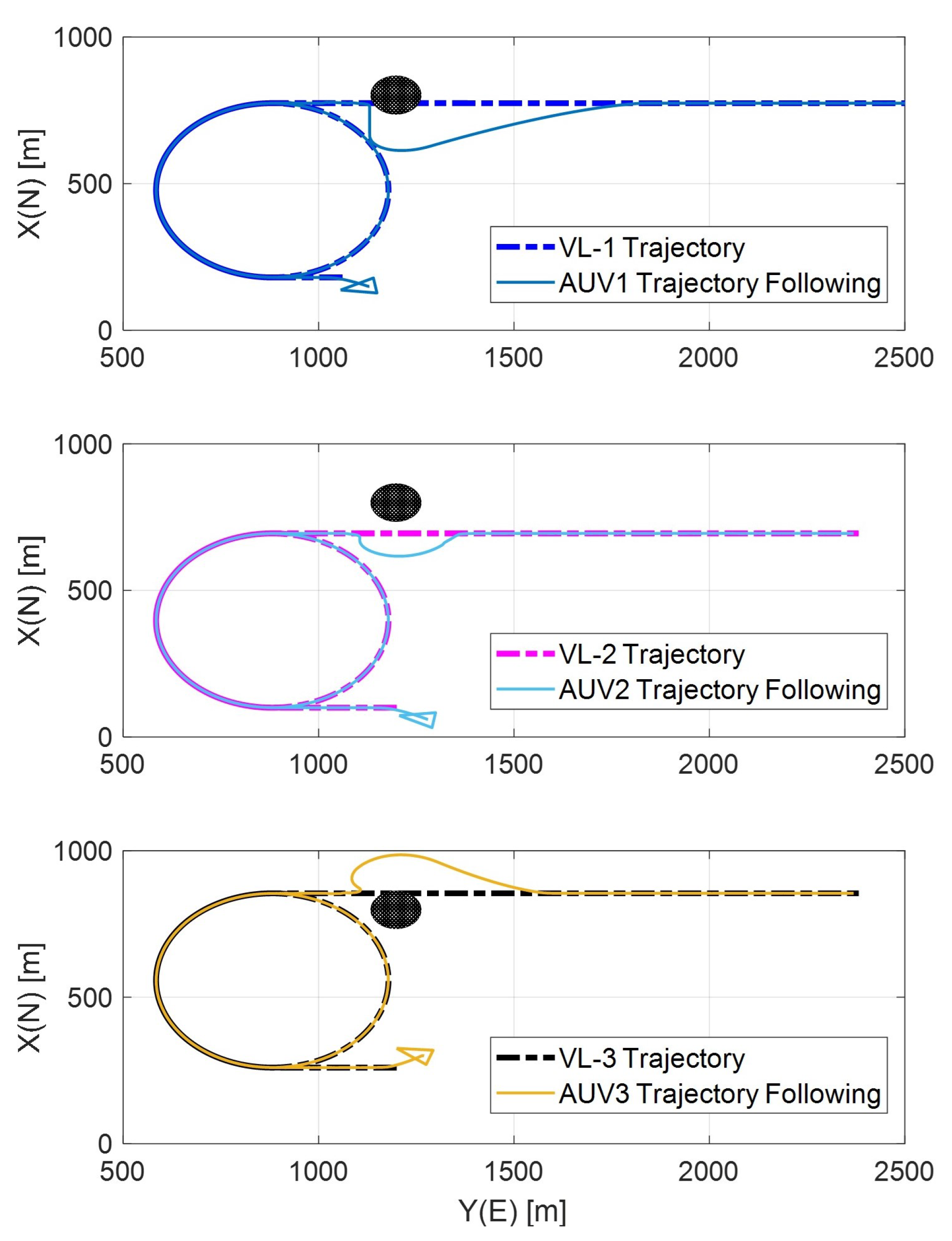
5. Numerical Studies
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Ren, W.; Cao, Y. Distributed Coordination of Multi-Agent Networks: Emergent Problems, Models, and Issues; Springer: London, UK, 2010. [Google Scholar]
- Chen, Y.; Wang, Z. Formation control: A review and a new consideration. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Oh, K.K.; Park, M.C.; Ahn, H.S. A survey of multi-agent formation control. Automatica 2015, 53, 424–440. [Google Scholar]
- Lewis, M.A.; Tan, K.H. High Precision Formation Control of Mobile Robots Using Virtual Structures. Auton. Robot. 1997, 4, 387–403. [Google Scholar] [CrossRef]
- Beard, R.W.; Lawton, J.; Hadaegh, F.Y. A coordination architecture for spacecraft formation control. IEEE Trans. Control Syst. Technol. 2001, 9, 777–790. [Google Scholar]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar]
- Reynolds, C.W. A distributed behavioral model. In Proceedings of the ACM SIGGRAPH’87, Anaheim, CA, USA, 27–31 July 1987. [Google Scholar]
- Olfati-Saber, R.; Murray, R.M. Distributed cooperative control of multiple vehicle formations using structural potential functions. In Proceedings of the 15th IFAC World Congress, Barcelona, Spain, 21–26 July 2002. [Google Scholar]
- Fax, J.A.; Murray, R.M. Information flow and cooperative control of vehicle formation. IEEE Trans. Autom. Control 2004, 49, 1465–1476. [Google Scholar] [CrossRef]
- Yan, Z.; Jiang, A.; Lai, C. Adaptive Formation Control of Unmanned Underwater Vehicles with Collision Avoidance under Unknown Disturbances. J. Mar. Sci. Eng. 2022, 10, 516. [Google Scholar] [CrossRef]
- Li, J.H.; Jun, B.H.; Lee, P.M.; Lim, Y.K. Schooling for multiple underwater AUVs. In Underwater Vehicles; InTech: Vienna, Austria, 2009; pp. 295–314. [Google Scholar]
- Cui, R.; Ge, S.S.; How, B.V.; Choo, Y.S. Leader-follower formation control of underactuated autonomous underwater vehicles. Ocean Eng. 2010, 37, 1491–1502. [Google Scholar] [CrossRef]
- Park, B.S. Adaptive formation control of underactuated autonomous underwater vehicles. Ocean Eng. 2015, 96, 1–7. [Google Scholar] [CrossRef]
- Li, H.; Xie, P.; Yan, W. Receding Horizon Formation Tracking Control of Constrained Underactauted Autonomous Underwater Vehicles. IEEE Trans. Ind. Electron. 2017, 64, 5004–5012. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Chang, W.J. Robust time-varying formation control for underactuated autonomous underwater vehicles with disturbances under input saturation. Ocean Eng. 2019, 179, 180–188. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, G. Velocity free leader-following formation control for autonomous underwater vehicles with line-of-sight range and angle constraints. Inf. Sci. 2019, 486, 359–378. [Google Scholar] [CrossRef]
- Qi, X.; Cai, Z.J. Three-dimensional formation control based on nonlinear small gain method for multiple underactuated underwater vehicles. Ocean Eng. 2018, 151, 105–114. [Google Scholar]
- Li, J.H.; Park, D.; Kang, H.; Cho, G.R. 3D formation control of multiple torpedo-type underactuated AUVs. In Proceedings of the 21st IFAC World Congress, Berlin, Germany, 12–17 July 2020. [Google Scholar]
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P. Nonlinear and Adaptive Control Design; John Wiley & Sons Inc.: New York, NY, USA, 1995. [Google Scholar]
- Slotine, J.E.; Li, W. Applied Nonlinear Control; Prentice-Hall Inc.: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons. Ltd.: Hoboken, NJ, USA, 2011. [Google Scholar]
- Li, J.H.; Lee, M.J.; Kang, H.; Kim, M.G.; Cho, G.R. Neural-Net based Robust Adaptive Control for 3D Path Following of Torpedo-type AUVs. In Proceedings of the 59th IEEE Conference on Decision and Control (CDC), Jeju Island, Korea, 14–18 December 2020. [Google Scholar]
- Giori, F.; Poggio, T. Networks and the Best Approximation Property. Biol. Cybern. 1990, 63, 169–176. [Google Scholar]
- Li, J.H.; Lee, P.M. Neural Network Adaptive Control for a Class of Nonlinear Systems with Unknown-Bound Unstructured Uncertainties. In Proceedings of the 43rd IEEE Conference on Decision and Control, Paradise Island, Bahamas, 14–17 December 2004. [Google Scholar]
- Collins, L.; Ghassemi, P.; Esfahani, E.T.; Doermann, D.; Dantu, K.; Chowdhury, S. Scalable Coverage Path Planning of Multi-Robot Teams for Monitoring Non-Convex Areas. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation, Xi’an, China, 31 May–4 June 2021. [Google Scholar]
- Kapetanovic, N.; Miskovic, N.; Tahirovic, A.; Kvasic, I. Side-Scan Sonar Data-Driven Coverage Path Planning: A Comparison of Approaches. In Proceedings of the MTS/IEEE Oceans 2019 Marseille, Marseille, France, 17–20 June 2019. [Google Scholar]
- Li, J.H.; Kang, H.; Park, G.H.; Suh, J.H. Real Time Path Planning of Underwater Robots in Unknown Environment. In Proceedings of the 2017 International Conference on Control, Artificial Intelligence, Robotics & Optimization, Prague, Czech Republic, 20–22 May 2017. [Google Scholar]
- Thurn, S.; Burgard, W.; Fox, D. Probabilistic Robotics; The MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Latombe, J.C. Robot Motion Planning; Kluwer Academic Publisher: Dordrecht, The Netherlands, 1991. [Google Scholar]
- Russell, S.; Norvig, P. Artificial Intelligence, A Mordern Approach, 4th ed.; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2021. [Google Scholar]
- Prestero, T. Verification of a Six-Degree of Freedom Simulation Model for the REMUS Autonomous Underwater Vehicles. Master’s Thesis, Department of Ocean Engineering and Mechanical Engineering, MIT, Cambridge, MA, USA, 2001. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.-H.; Kang, H.; Kim, M.-G.; Lee, M.-J.; Cho, G.R.; Jin, H.-S. Adaptive Formation Control of Multiple Underactuated Autonomous Underwater Vehicles. J. Mar. Sci. Eng. 2022, 10, 1233. https://doi.org/10.3390/jmse10091233
Li J-H, Kang H, Kim M-G, Lee M-J, Cho GR, Jin H-S. Adaptive Formation Control of Multiple Underactuated Autonomous Underwater Vehicles. Journal of Marine Science and Engineering. 2022; 10(9):1233. https://doi.org/10.3390/jmse10091233
Chicago/Turabian StyleLi, Ji-Hong, Hyungjoo Kang, Min-Gyu Kim, Mun-Jik Lee, Gun Rae Cho, and Han-Sol Jin. 2022. "Adaptive Formation Control of Multiple Underactuated Autonomous Underwater Vehicles" Journal of Marine Science and Engineering 10, no. 9: 1233. https://doi.org/10.3390/jmse10091233