
Application of the Trigonometric Polynomial Interpolation for the Estimation of the Vertical Eddy Viscosity Coefficient Based on the Ekman Adjoint Assimilation Model


Abstract
:1. Introduction
2. Model and Estimation Scheme
2.1. Forward Model
2.2. Adjoint Model
3. Twin Experiments and Results Analysis
3.1. Model Settings
- (1)
- The forward model is run with a given VEVC, and the simulated currents are considered the observed values.
- (2)
- The forward model is run with the constant initial guess of the VEVC (A0 = 0.008 m2/s) to obtain the simulated values of the currents.
- (3)
- The difference between the simulation and observed values is used to drive the adjoint model and to solve for the cost function and the gradient of the cost function concerning VEVC.
- (4)
- The initial estimated values of the VEVC are optimized with different interpolation schemes using the gradient of the cost function.
- (5)
- The optimized values are regarded as the new guess values, and steps (2)–(4) are repeated until the difference satisfies a certain convergence criterion. The final inversion values of the VEVC can then be obtained.
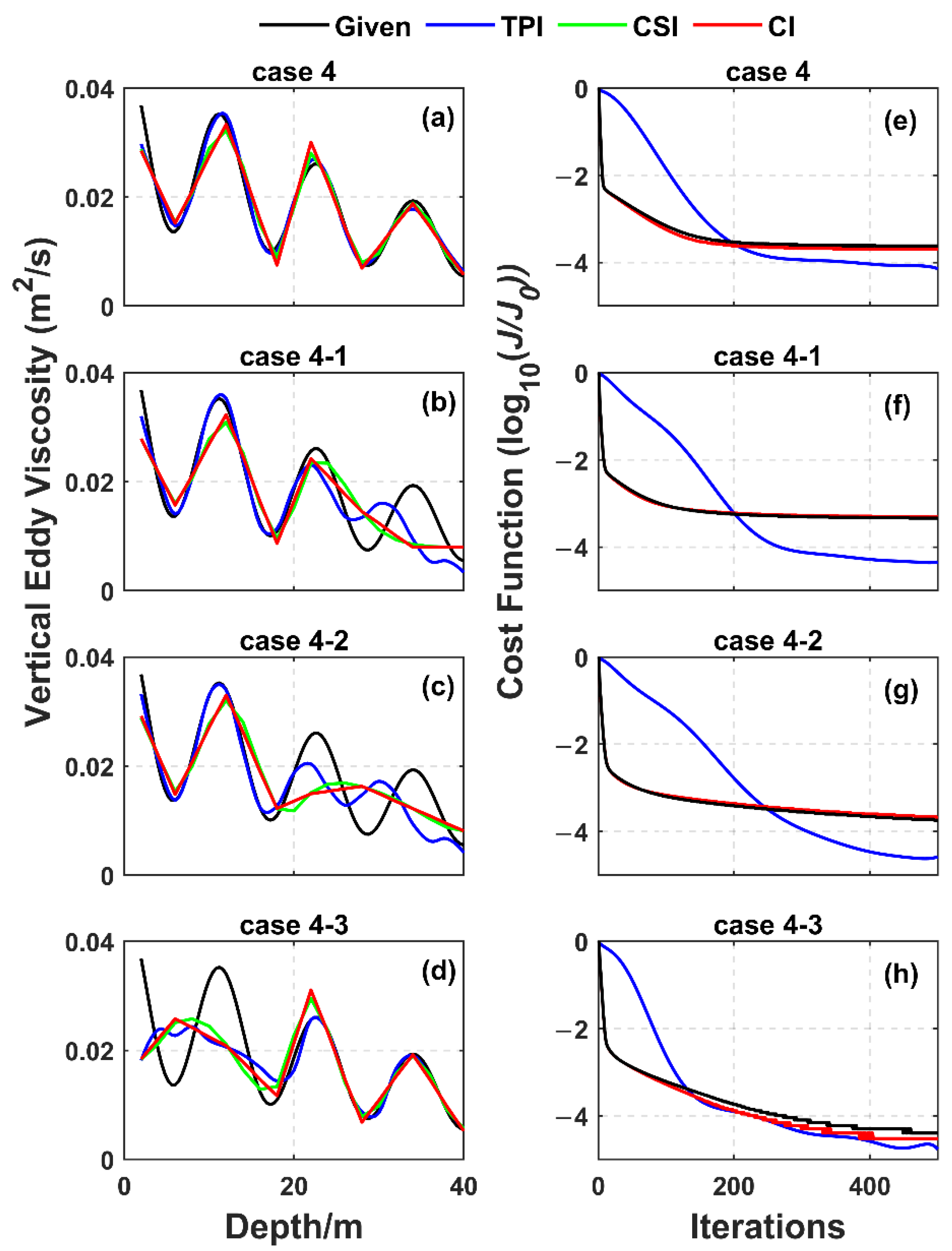
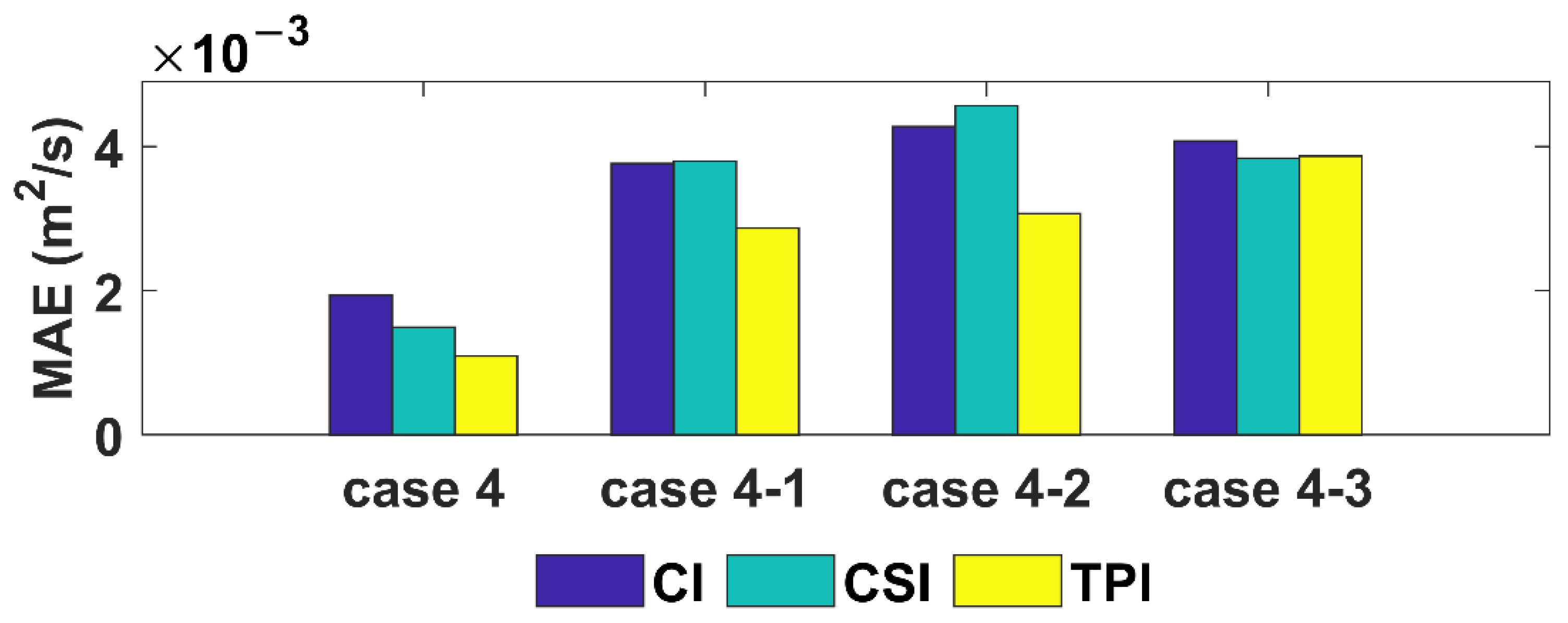
3.2. Group 1: Estimation of Given VEVCs
- Case 1:
- Case 2:
- Case 3:
- Case 4:
3.3. Group 2: Effect of Missing Observations at Partial Depths
3.4. Group 3: Effect of the Boundary Layer Depth
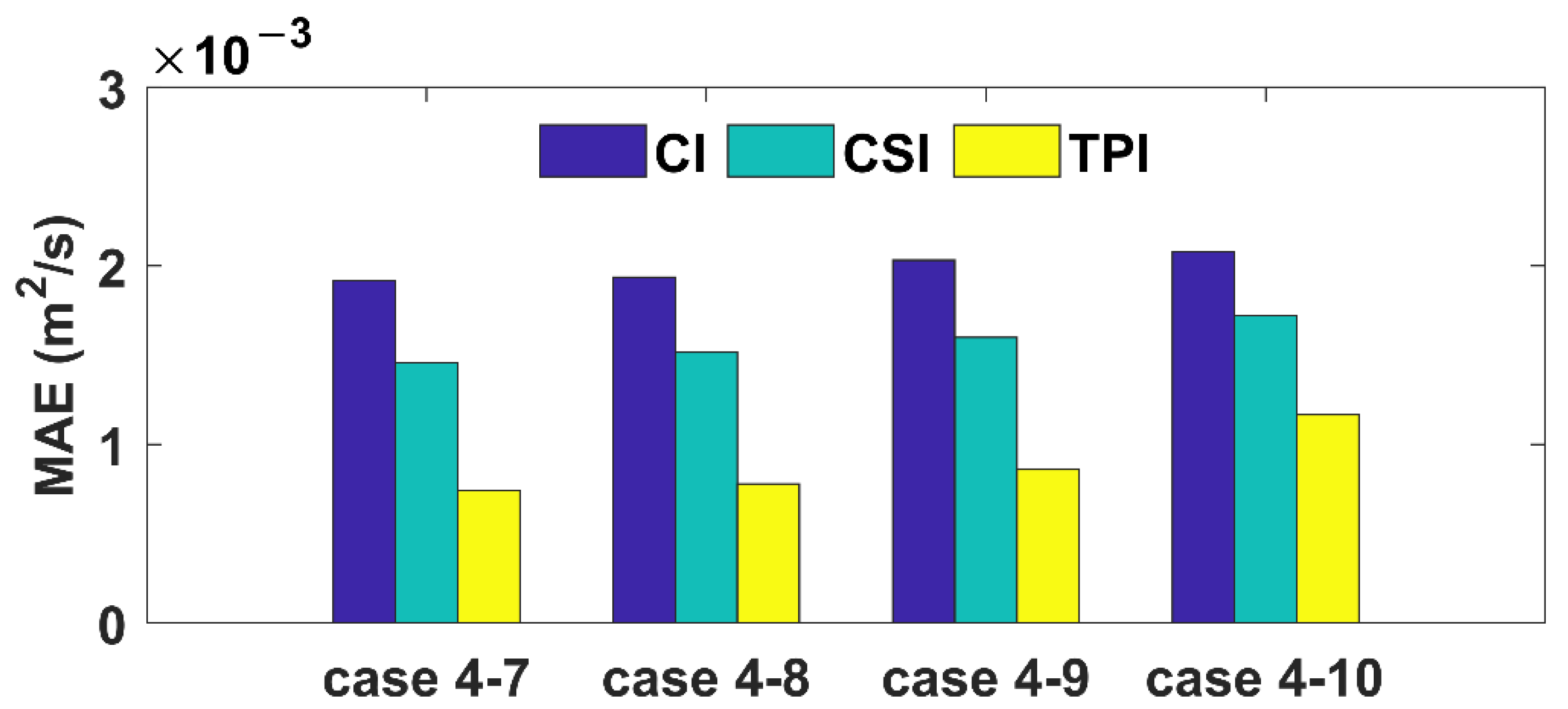
3.5. Group 4: Effect of Noisy Data
3.6. Group 5: Effect of Wind Stress Drag Coefficient Optimization
- Case 4-11:
- Case 4-12:
- Case 4-13:
4. Practical Experimentation and Results
4.1. Data and Experimental Design
4.2. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Tian, J.; Xie, L. Estimation of eddy viscosity on the South China Sea shelf with adjoint assimilation method. Acta Oceanol. Sin. 2009, 28, 9–16. [Google Scholar]
- Levermore, C.D.; Sammartino, M. A shallow water model with eddy viscosity for basins with varying bottom topography. Nonlinearity 2001, 14, 1493–1515. [Google Scholar] [CrossRef]
- Pedlosky, J. Geophysical Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 1987; Volume 710. [Google Scholar]
- Yoshikawa, Y.; Matsuno, T.; Wagawa, T.; Hasegawa, T.; Nishiuchi, K.; Okamura, K.; Yoshimura, H.; Morii, Y. Tidal and low-frequency currents along the CK Line (31deg 45min N) over the East China Sea shelf. Cont. Shelf Res. 2012, 50–51, 41–53. [Google Scholar] [CrossRef]
- Davies, A.M.; Xing, J. The influence of eddy viscosity parameterization and turbulence energy closure scheme upon the coupling of tidal and wind induced currents. Estuar. Coast. Shelf Sci. 2001, 53, 415–436. [Google Scholar] [CrossRef]
- Lenn, Y.D.; Chereskin, T.K. Observations of Ekman currents in the Southern Ocean. J. Phys. Oceanogr. 2009, 39, 768–779. [Google Scholar] [CrossRef] [Green Version]
- Zhao, R.; Vallis, G. Parameterizing mesoscale eddies with residual and Eulerian schemes, and a comparison with eddy-permitting models. Ocean Model. 2008, 23, 1–12. [Google Scholar] [CrossRef]
- Song, J.B.; Huang, Y.S. An approximate solution of wave-modified Ekman current for gradually varying eddy viscosity. Deep. Res. Part I Oceanogr. Res. Pap. 2011, 58, 668–676. [Google Scholar] [CrossRef]
- Song, J.B.; Xu, J.L. Wave-modified Ekman current solutions for the vertical eddy viscosity formulated by K-Profile Parameterization scheme. Deep. Res. Part I Oceanogr. Res. Pap. 2013, 80, 58–65. [Google Scholar] [CrossRef]
- Price, J.F.; Weller, R.A.; Schudlich, R.R. Wind-Driven Ocean currents and Ekman transport. Science 1987, 238, 1534–1538. [Google Scholar] [CrossRef] [Green Version]
- Chereskin, T.K. Direct evidence for an Ekman balance in the California Current. J. Geophys. Res. 1995, 100, 18261–18269. [Google Scholar] [CrossRef]
- Elipot, S.; Gille, S.T. Ekman layers in the Southern Ocean: Spectral models and observations, vertical viscosity and boundary layer depth. Ocean Sci. 2009, 5, 115–139. [Google Scholar] [CrossRef] [Green Version]
- Polton, J.A.; Lenn, Y.D.; Elipot, S.; Chereskin, T.K.; Sprintall, J. Can drake passage observations match ekman’s classic theory. J. Phys. Oceanogr. 2013, 43, 1733–1740. [Google Scholar] [CrossRef] [Green Version]
- Roach, C.J.; Phillips, H.E.; Bindoff, N.L.; Rintoul, S.R. Detecting and characterizing Ekman currents in the Southern Ocean. J. Phys. Oceanogr. 2015, 45, 1205–1223. [Google Scholar] [CrossRef]
- Ferreira, V.G.; Mangiavacchi, N.; Tomé, M.F.; Castelo, A.; Cuminato, J.A.; McKee, S. Numerical simulation of turbulent free surface flow with two-equation k-ε eddy-viscosity models. Int. J. Numer. Methods Fluids 2004, 44, 347–375. [Google Scholar] [CrossRef]
- Pacanowski, R.; Philander, S. Parameterization of Vertical Mixing in Numerical Models of Tropical Oceans. J. Phys. Oceanogr.-J. PHYS Ocean. 1981, 11, 1443–1451. [Google Scholar] [CrossRef]
- Mellor, G.L. USERS GUIDE for OCEAN MODEL. Ocean Model. 2004, 8544, 0710. [Google Scholar]
- Odier, P.; Chen, J.; Rivera, M.K.; Ecke, R.E. Fluid mixing in stratified gravity currents: The prandtl mixing length. Phys. Rev. Lett. 2009, 102, 134504. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Qiao, F.; Fang, G.; Wei, Z. Application of wave-induced vertical mixing to the K profile parameterization scheme. J. Geophys. Res. Ocean. 2010, 115, 1–12. [Google Scholar] [CrossRef]
- Zhang, J.; Lu, X. Inversion of three-dimensional tidal currents in marginal seas by assimilating satellite altimetry. Comput. Methods Appl. Mech. Eng. 2010, 199, 3125–3136. [Google Scholar] [CrossRef]
- Yu, L.; O’Brien, J.J. Variational Estimation of the Wind Stress Drag Coefficient and the Oceanic Eddy Viscosity Profile. J. Phys. Oceanogr. 1991, 21, 709–719. [Google Scholar] [CrossRef] [Green Version]
- Cao, A.; Chen, H.; Fan, W.; He, H.; Song, J.-B.; Zhang, J.-C. Estimation of Eddy Viscosity Profile in the Bottom Ekman Boundary Layer. J. Atmos. Ocean. Technol. 2017, 34, 2163–2175. [Google Scholar] [CrossRef]
- Yoshikawa, Y.; Endoh, T.; Matsuno, T.; Wagawa, T.; Tsutsumi, E.; Yoshimura, H.; Morii, Y. Turbulent bottom Ekman boundary layer measured over a continental shelf. Geophys. Res. Lett. 2010, 37, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Yoshikawa, Y.; Endoh, T. Estimating the eddy viscosity profile from velocity spirals in the Ekman boundary layer. J. Atmos. Ocean. Technol. 2015, 32, 793–804. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Li, G.; Yi, J.; Gao, Y.; Cao, A. A method on estimating time-varying vertical eddy viscosity for an ekman layer model with data assimilation. J. Atmos. Ocean. Technol. 2019, 36, 1789–1812. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Cao, A.; Zhang, J.; Miao, C.; Lv, X. Estimation of spatially varying open boundary conditions for a numerical internal tidal model with adjoint method. Math. Comput. Simul. 2014, 97, 14–38. [Google Scholar] [CrossRef]
- Jiang, D.; Chen, H.; Jin, G.; Lv, X. Estimating smoothly varying open boundary conditions for a 3D internal tidal model with an improved independent point scheme. J. Atmos. Ocean. Technol. 2018, 35, 1299–1311. [Google Scholar] [CrossRef]
- Jin, G.; Pan, H.; Zhang, Q.; Lv, X.; Zhao, W.; Gao, Y. Determination of harmonic parameters with temporal variations: An enhanced harmonic analysis algorithm and application to internal tidal currents in the South China Sea. J. Atmos. Ocean. Technol. 2018, 35, 1375–1398. [Google Scholar] [CrossRef]
- Nie, Y.; Wang, Y.; Lv, X. Acquiring the arctic-scale spatial distribution of snow depth based on AMSR-E snow depth product. J. Atmos. Ocean. Technol. 2019, 36, 1957–1965. [Google Scholar] [CrossRef]
- Wu, X.; Xu, M.; Gao, Y.; Lv, X. A scheme for estimating time-varying wind stress drag coefficient in the ekman model with adjoint assimilation. J. Mar. Sci. Eng. 2021, 9, 1220. [Google Scholar] [CrossRef]
- Zhang, J.; Lu, X. Parameter estimation for a three-dimensional numerical barotropic tidal model with adjoint method. Int. J. Numer. Methods Fluids 2008, 57, 47–92. [Google Scholar] [CrossRef]
- De Serio, F.; Mossa, M. Analysis of mean velocity and turbulence measurements with ADCPs. Adv. Water Resour. 2015, 81, 172–185. [Google Scholar] [CrossRef]
- Nystrom, E.A.; Rehmann, C.R.; Oberg, K.A. Evaluation of Mean Velocity and Turbulence Measurements with ADCPs. J. Hydraul. Eng. 2007, 133, 1310–1318. [Google Scholar] [CrossRef] [Green Version]
- Zedler, S.E.; Dickey, T.D.; Doney, S.C.; Price, J.F.; Yu, X.; Mellor, G.L. Analyses and simulations of the upper ocean’s response to Hurricane Felix at the Bermuda Testbed Mooring site: 13-23 August 1995. J. Geophys. Res. Oceans 2002, 107, 13–23. [Google Scholar] [CrossRef] [Green Version]
- Large, W.G.; Pond, S. Open Ocean Momentum Flux Measurements in Moderate to Strong Winds. J. Phys. Oceanogr. 1981, 11, 324–336. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.C.; Jung, K.T. Application of eddy viscosity closure models for the M2 tide and tidal currents in the Yellow Sea and the East China Sea. Cont. Shelf Res. 1999, 19, 445–475. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value | Units |
|---|---|---|---|
| Total integration time | T | 10 | day |
| Time increment | Δt | 0.5 | hour |
| Vertical space step | Δz | 2.0 | m |
| Ekman depth | H0 | 40 | m |
| Initial zonal velocity | 0 | m⋅s−1 | |
| Initial meridional velocity | 0 | m⋅s−1 | |
| Coriolis parameter | 10−4 | s−1 | |
| Seawater density | rw | 1.025 × 103 | kg⋅m−3 |
| Air density | ra | 1.2 | kg⋅m−3 |
| Wind stress drag coefficient | Cd | 0.0012 | / |
| TPI | CI | CSI | ||
|---|---|---|---|---|
| Group 1 | Case 1 | \ | 2 | 2 |
| Case 2 | \ | 4 | 4 | |
| Case 3 | \ | 6 | 6 | |
| Case 4 | \ | 8 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Xu, M.; Gao, G.; Yin, B.; Lv, X. Application of the Trigonometric Polynomial Interpolation for the Estimation of the Vertical Eddy Viscosity Coefficient Based on the Ekman Adjoint Assimilation Model. J. Mar. Sci. Eng. 2022, 10, 1165. https://doi.org/10.3390/jmse10081165
Wu X, Xu M, Gao G, Yin B, Lv X. Application of the Trigonometric Polynomial Interpolation for the Estimation of the Vertical Eddy Viscosity Coefficient Based on the Ekman Adjoint Assimilation Model. Journal of Marine Science and Engineering. 2022; 10(8):1165. https://doi.org/10.3390/jmse10081165
Chicago/Turabian StyleWu, Xinping, Minjie Xu, Guandong Gao, Baoshu Yin, and Xianqing Lv. 2022. "Application of the Trigonometric Polynomial Interpolation for the Estimation of the Vertical Eddy Viscosity Coefficient Based on the Ekman Adjoint Assimilation Model" Journal of Marine Science and Engineering 10, no. 8: 1165. https://doi.org/10.3390/jmse10081165