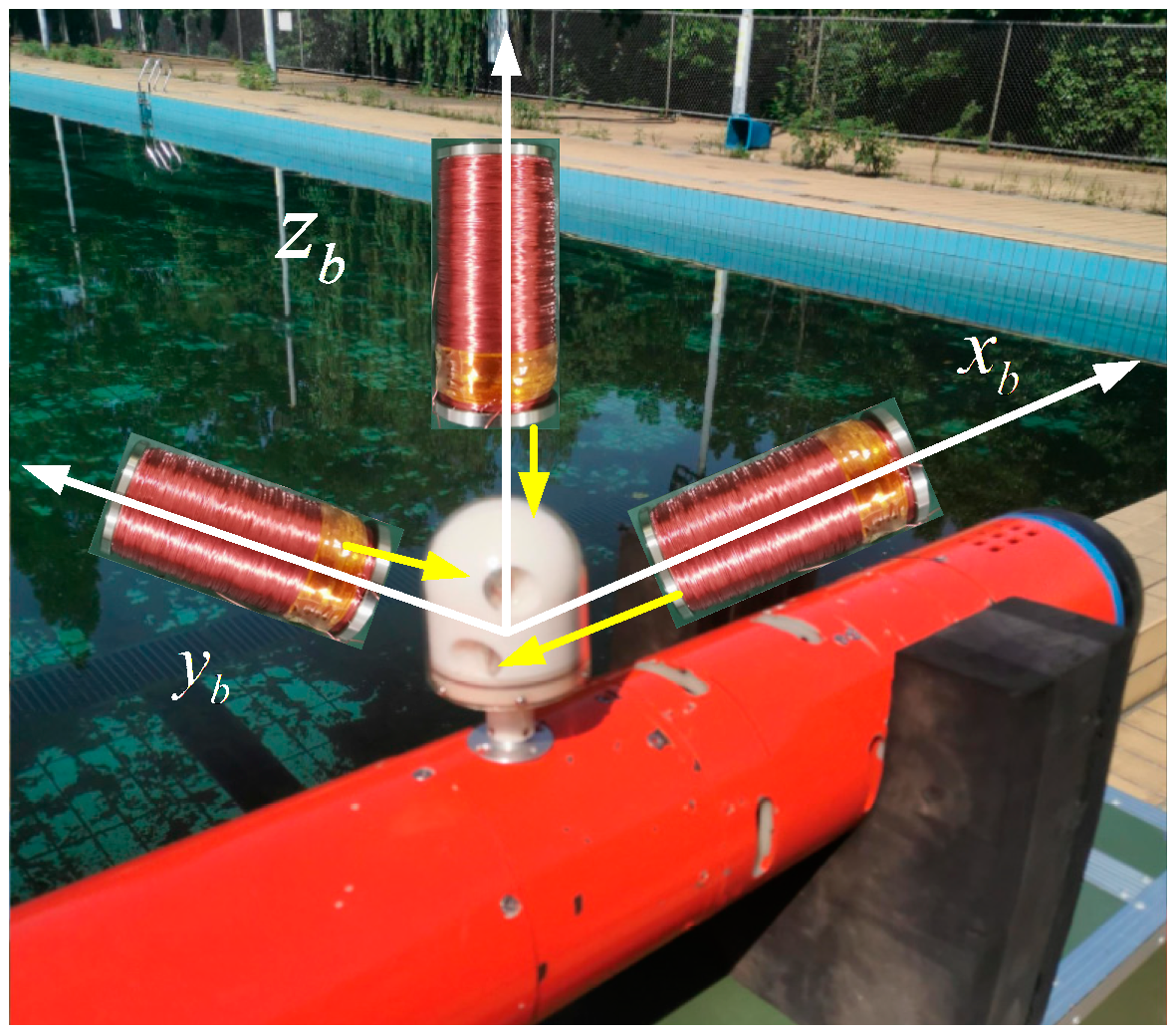
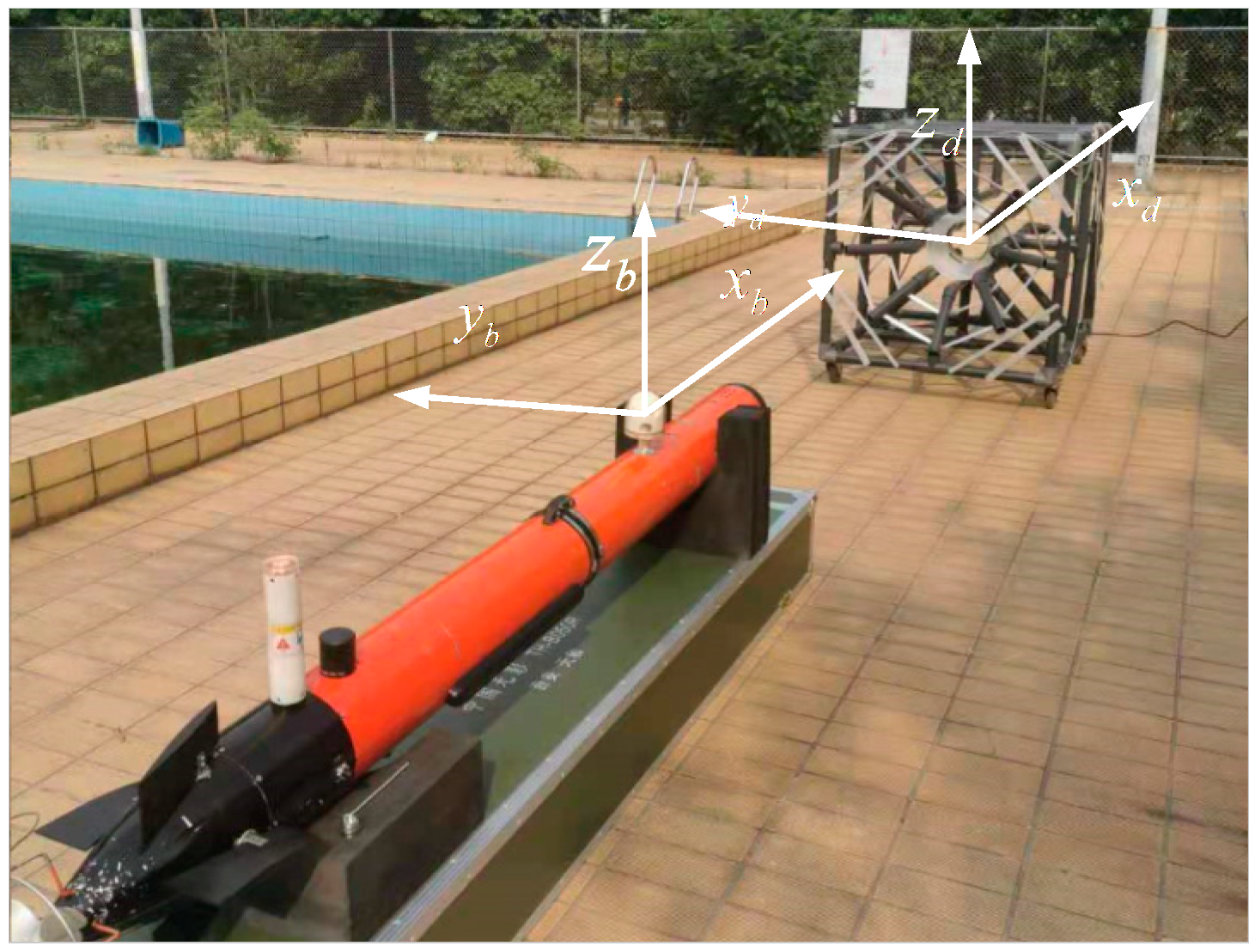
The AUV terminal guidance coordinate system, which includes the fixed coordinates and the body coordinates, is established as shown in
Figure 6. The axes of the triaxial-coil magnetometer are allied with the
x′-,
y′- and
z′-axis of the AUV body coordinates. The winding direction of the three coils determined according to the right-hand rule is the same as the direction of their respective coordinate axes.
are the difference in the yaw angle, roll angle, and pitch angle between the DS and AUV, respectively. The AUV in this paper can maintain a small roll angle and pitch angle during navigation, that is,
. So, the rotation matrix is approximately equal to:
4.1. Positioning Method Based on Induced Voltage Information of Three-Axis Coils
AUV can usually realize fixed depth navigation according to depth control, so the terminal docking guidance can be regarded as the movement in a horizontal plane. Furthermore, in normal terminal guidance, the AUV’s velocity always includes a component towards the positive direction of the x-axis in fixed coordinates. Suppose that the AUV’s depth will be maintained slightly lower than the depth of the DS’s centerline so that the triaxial magnetometer can keep on the horizontal plane of the central axis of the transmitting coil. In this situation, the number of the position solution is reduced to two. The area with the opening angle in front of the DS is defined as the electromagnetic guidance area. The acoustic guidance in remote homing can guide the AUV into this range, so the setting of this area is reasonable. Since the difference in the yaw angle between AUV and DS during terminal guidance is not equal to 0, the magnetic field vector on the x′- and y′-axis () of the magnetometer in body coordinates is not equal to the magnetic field vector on the x- and y-axis () of the point in the fixed coordinates. So, the relationship between and is analyzed emphatically here. For the convenience of analysis, the relationship between and is judged by their value at the time , at which the current of the transmitting coil reaches a positive amplitude. is defined as the value of at time , the value of which is or . Similarly, is defined as the value of at time , the value of which is or .
The position and yaw angle of AUV in the defined terminal electromagnetic guidance area can be divided into eight types, as shown in
Figure 7. The relationship between
and
is shown in
Table 3 and
Table 4 where
y < 0 and
y > 0, respectively.
From the above analysis, it can be seen that only under the conditions that
or
, the phase of
is inconsistent with
. Therefore, it is necessary to restrict the yaw angle of AUV during the electromagnetic terminal guidance to avoid this situation. Considering that the electromagnetic guidance area is defined as
, if the restriction
is added to the yaw angle of AUV, then
is obtained, that is,
remains in-phase with
. In the
z-axis direction, because the roll angle and pitch angle of the AUV are very small, the magnetic field intensity
on the
z′ axis of the triaxial-coil magnetometer is basically equal to the magnetic field
in the
z-axis in the fixed coordinates. When the triaxial-coil magnetometer moves to the positive direction of the z-axis,
is anti-phase with
or
. On the contrary, when the triaxial-coil magnetometer moves to the negative direction of the z-axis,
is in-phase with
or
. Therefore, the relationship between the magnetic field intensity
at time
on the triaxial-coil magnetometer and
in fixed coordinates is:
According to Formula (22), the amplitude of the magnetic field intensity on each axis can be calculated by the induced voltage amplitude. The phase between the magnetic field of two coil axes can be obtained according to the phase between the induced voltage waveform of the two axes. The matrix
is defined as the amplitude with the polarity of the induced voltage of the triaxial coils detected by the ADC, where
. If
and
or
and
are in-phase,
. Meanwhile, if
and
or
and
are anti-phase,
. Therefore, the magnetic field component
at time
can be expressed as:
where
,
and
are defined as the receiving parameters of the
,
, and
axes of the triaxial-coil magnetometer, respectively. The parameter is multiplied by the permeability, the equivalent turns
and the average area
of the coil. Taking the receiving parameter
on the
x′ axis as an example,
. According to Formulas (26) and (27),
in the fixed-coordinate system is expressed as:
If
is in-phase
, then the polarity of
is positive; otherwise, the polarity of
is negative. The phase between
and
is also analyzed in this way. The absolute value of
and the polarity of
is utilized to determine the unique position based on the positioning method proposed in
Section 2. According to Formula (28), the term
in Formula (12) can be further expressed as:
The transmitting parameter of the electromagnetic guidance system is defined as
, which is only related to the turns, current, and area of the transmitting coil. Therefore, the three axis coils on the magnetometer share the same transmitting parameter. The product of the receiving parameters and transmitting parameter of each coil is defined as a system parameter
. Multiplying the numerator and denominator in Formula (29) by
, Formula (29) is expressed as:
Similarly, the terms
and
in Formulas (17) and (18) can also transform like
mentioned above, and the final position solution using the induced voltage information is shown below:
.
According to Formula (33), if each coil in the magnetometer is placed on the axis of the transmitting coil with its axis coinciding with the axis of the transmitting coil, the system parameter of each coil in the receiver can be obtained by the amplitude
of the induced voltage and distance
:
4.2. Guidance Control Strategy
The terminal guidance diagram of an AUV in the northeast sky coordinate is shown in
Figure 8. The yaw angle of the DS and the AUV is defined as
and
, respectively. Then, the yaw difference
between AUV and DS is:
We define the angle
as the direction angle between the center line of the DS and the line connecting the triaxial-coil magnetometer and the origin point of the fixed coordinate system. The measured direction angle is related to the coordinates (
x,
y) calculated by the triaxial-coil magnetometer:
As shown in
Figure 8, the angle difference
between the AUV’s yaw angle and the line connecting the triaxial-coil magnetometer is defined, and the origin point of the fixed-coordinate system is:
The angle
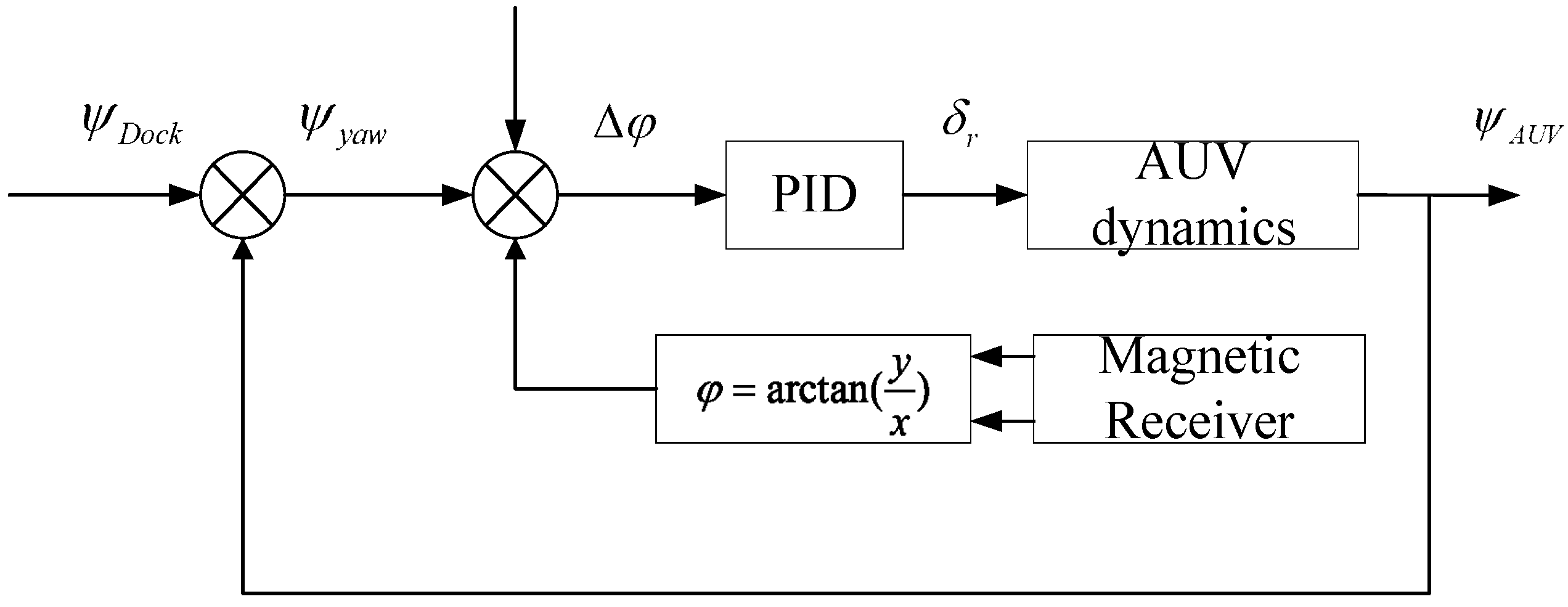
being equal to 0 means that the AUV tracks the line connecting the triaxial-coil magnetometer and the origin point of the fixed coordinate, and it will finally enter the DS. The docking control strategy to adjust the angle
to 0 by adjusting the horizontal rudder of the AUV is shown in
Figure 9. Since the DS is fixed underwater, the yaw angle of the DS will not change. The AUV obtains the current yaw deviation by the compass, then calculates the current coordinates and direction angle in the fixed-coordinate system based on the data from the triaxial-coil magnetometer. The difference
between the angle
and 0 is the control quantity of the system. It is changed into the required steering angle
by using the PID controller, and then the AUV is controlled to continuously track the origin of the DS in terminal docking guidance.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}