
Numerical Study of Wave Drift Load and Turning Characteristics of KVLCC2 Ship in Regular Waves Based on TEBEM

Abstract
:1. Introduction
2. Two-Time Scale Model
- (1)
- The time domain TEBEM is used to solve the boundary value problem of the ship at its initial velocity and position. Subsequently, the first-order hydrodynamic force is obtained by the pressure integration on the wet surface of the ship, and the high-frequency motion of the ship is obtained using the wave-induced 6-DOF motion equations. Finally, the wave drift forces and moment are directly calculated using the near-field integral method;
- (2)
- The boundary value problem of the ship is updated via the high-frequency motion obtained in step (1). Subsequently, the time domain TEBEM is used to solve the new boundary value problem of the ship at its initial velocity and position. Finally, the new high-frequency motion of the ship and wave drift forces and moment are obtained. Steps (1) and (2) are termed the seakeeping problem, and Nt steps are calculated circularly;
- (3)
- The obtained wave drift forces and moment are fitted via the least-squares method, and the result is incorporated into the MMG maneuvering motion. The ship velocity, heading angle, and position of the ship in the space-fixed coordinate system at the next moment are obtained by solving the MMG maneuvering motion equation;
- (4)
- The double-body (DB) flow velocity potential is recalculated according to the ship velocity, and the boundary value conditions satisfied by the disturbed potential are updated according to the calculated results;
- (5)
- The time-domain TEBEM is used to solve the boundary value problem of the updated disturbed potential. Subsequently, the wave frequency motion and the wave drift forces and moment are recalculated, and the Nt seakeeping steps are calculated circularly;
- (6)
- The wave drift forces and moment obtained in step (5) are fitted via the least-squares method. They are then brought back to the maneuvering motion equation for the next step of the maneuvering numerical simulation.
- (7)
- The above six steps are repeated until the calculation time is met. Figure 1 shows the algorithm process of the two-time scale model.
3. Maneuvering Motion
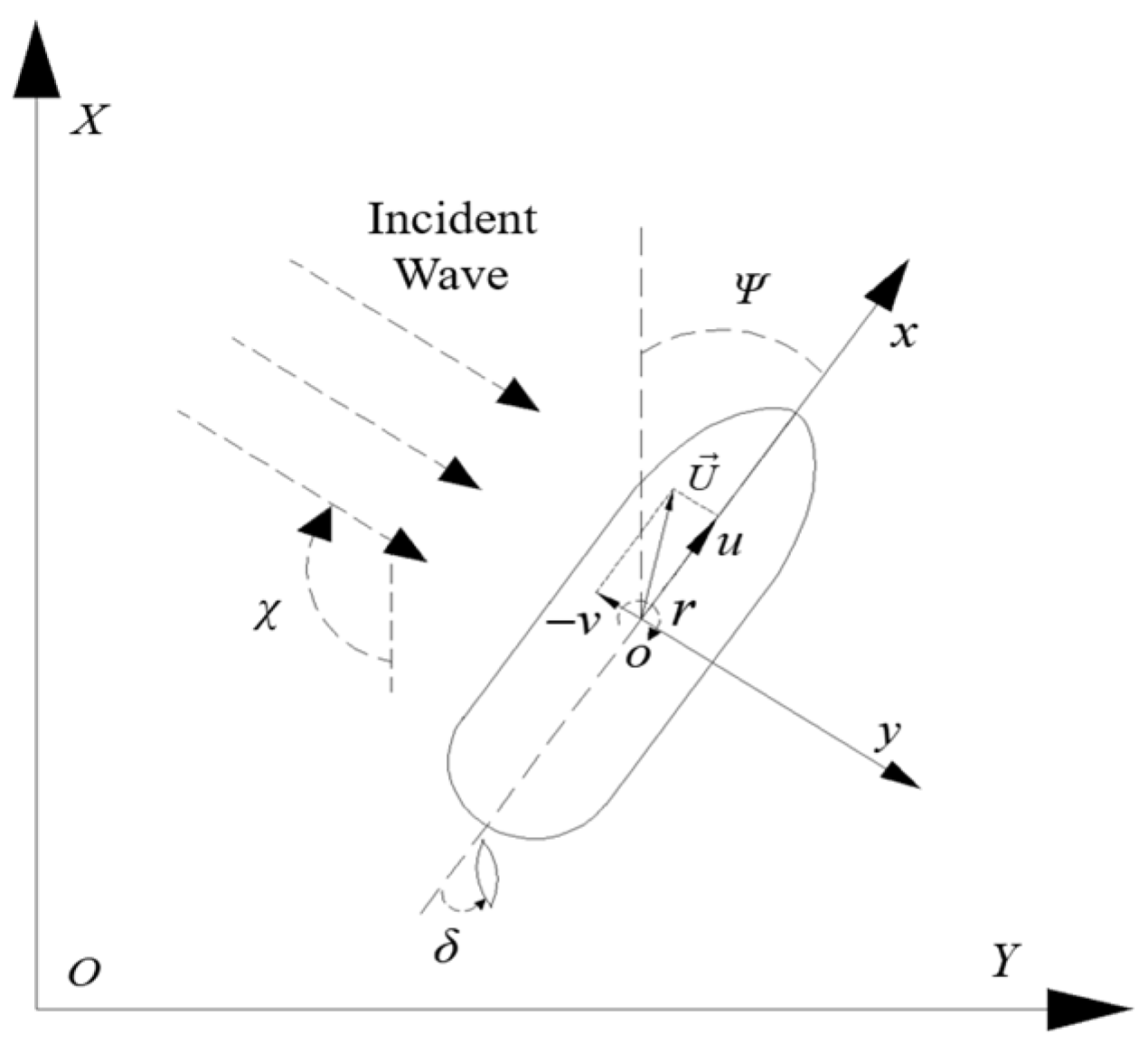
3.1. Coordinate Systems
3.2. Basic Equations of Ship Maneuvering Motion
3.3. Hydrodynamic Forces Acting on Ship Hull
3.4. Hydrodynamic Force Due to Propeller
3.5. Hydrodynamic Forces by Steering
4. Wave-Induced Motion
4.1. Boundary Value Problem and Wave Drift Loads
4.2. Taylor Expansion Boundary Element Method (TEBEM)
5. Numerical Results and Discussions
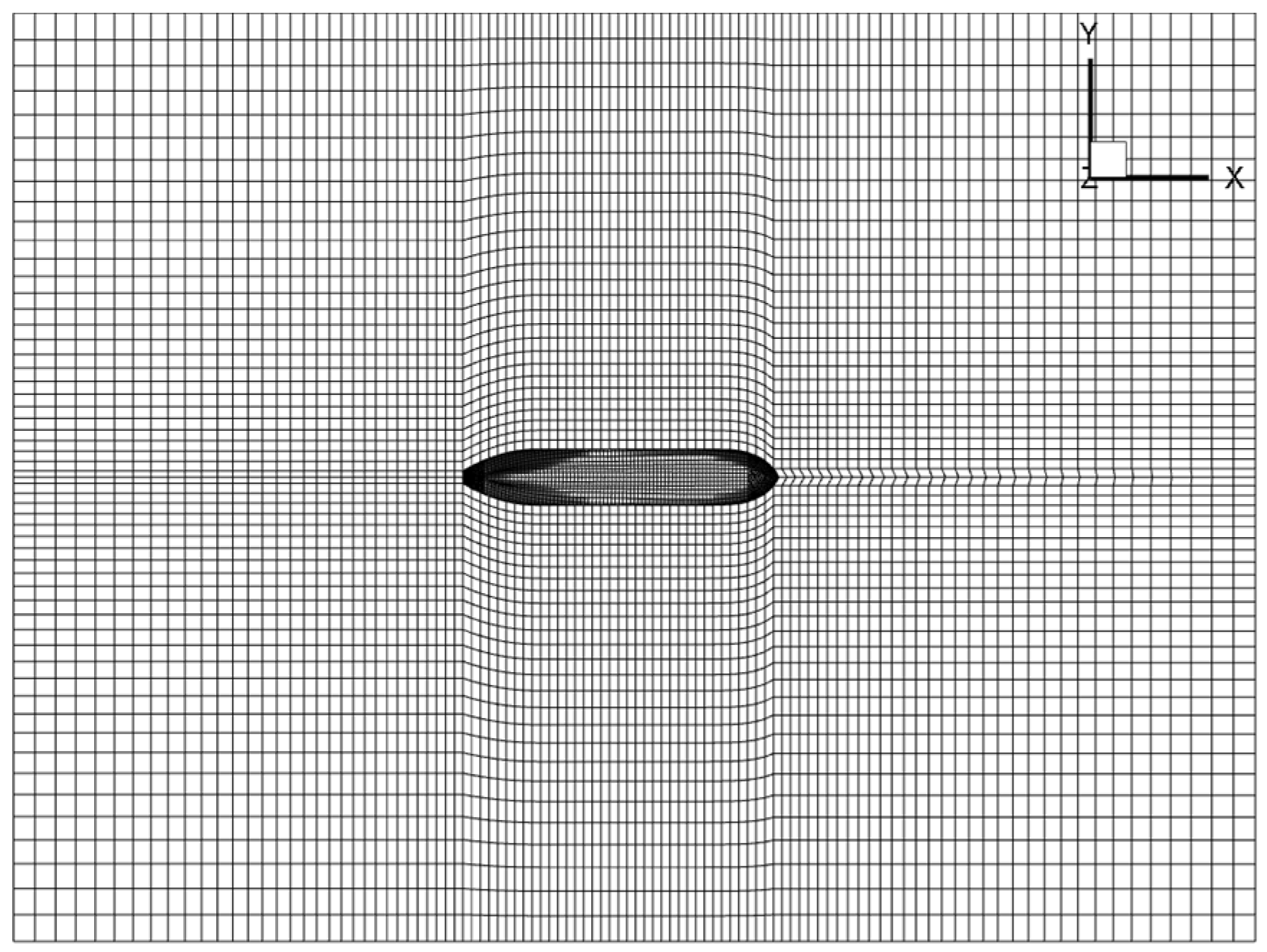
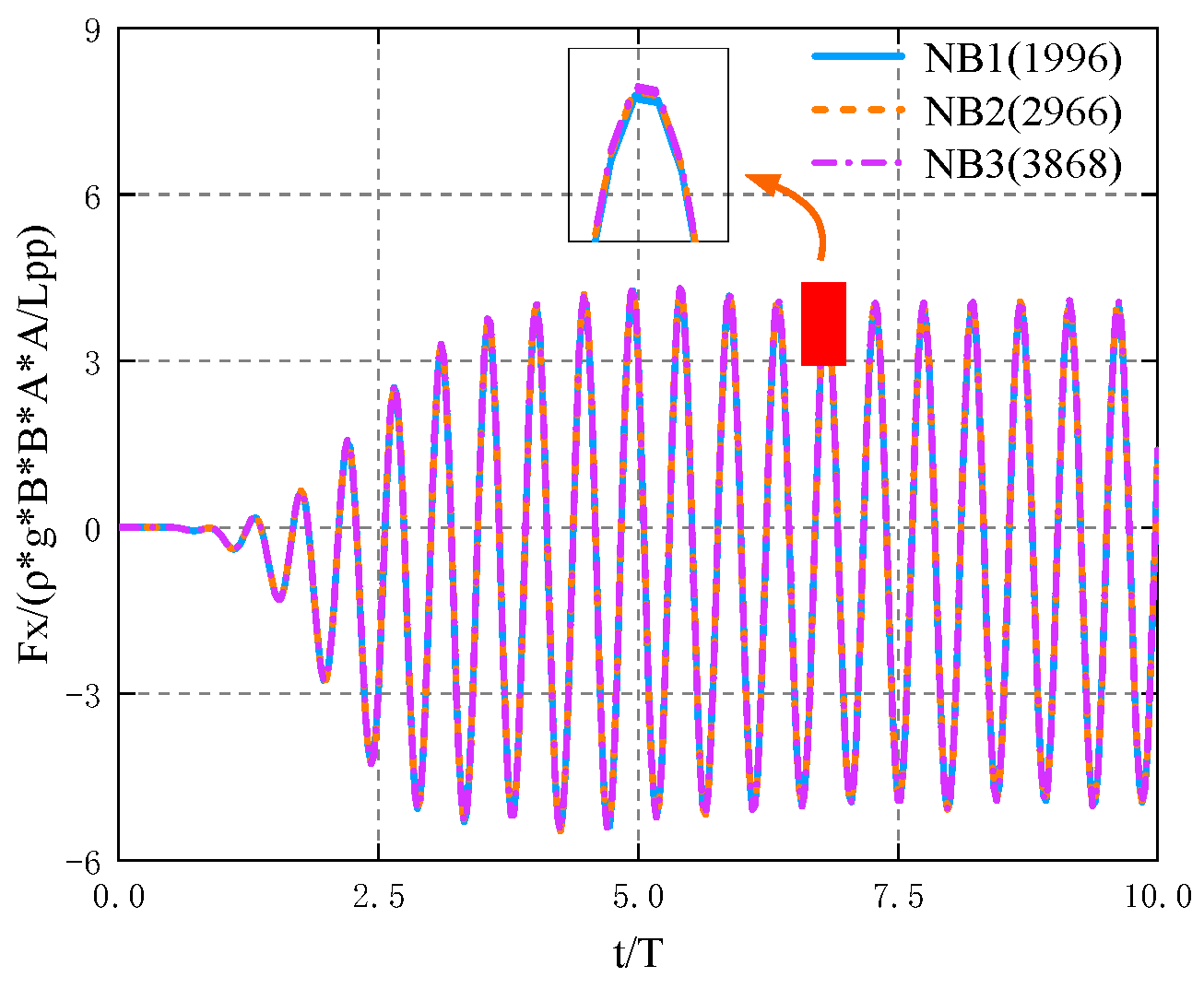
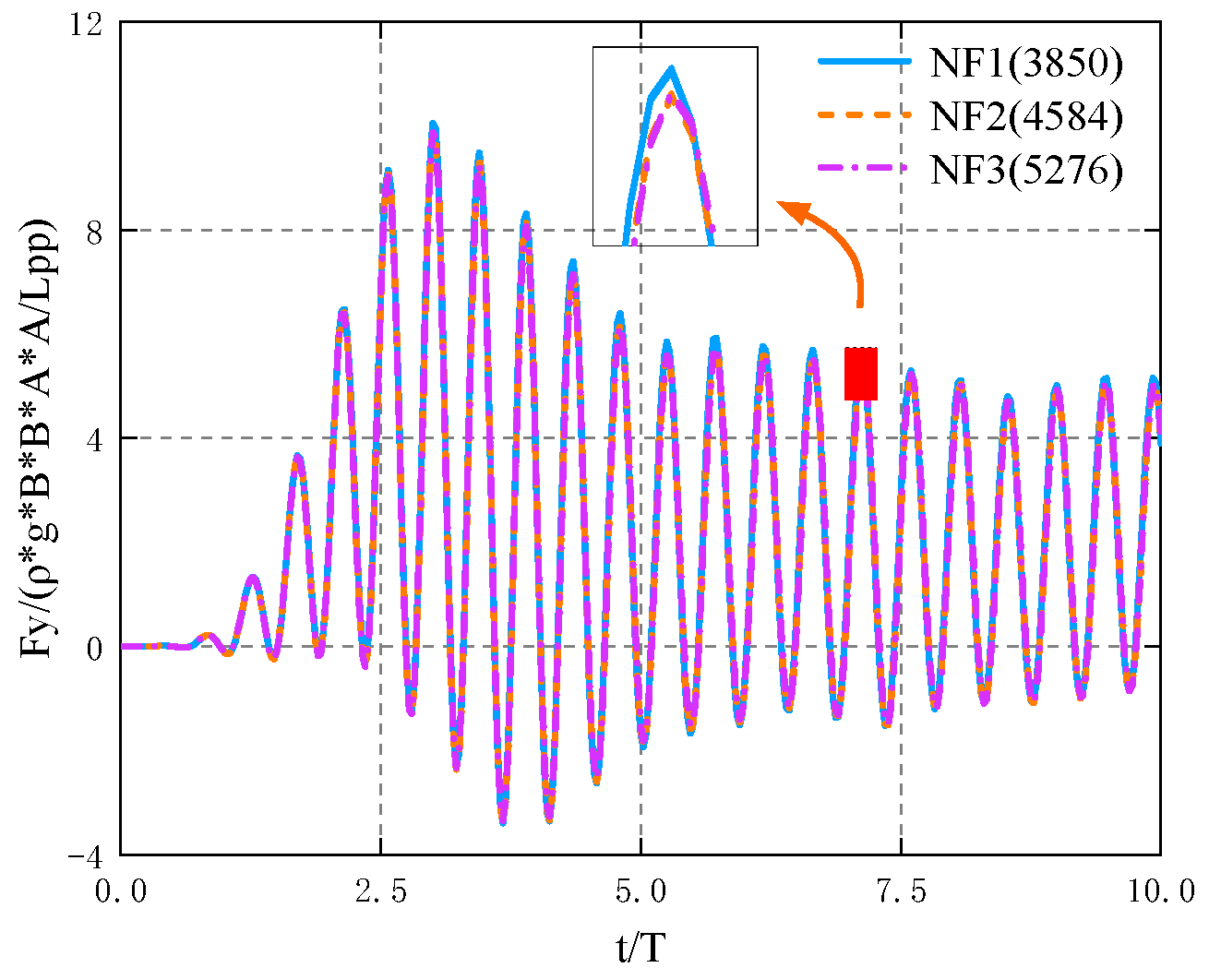
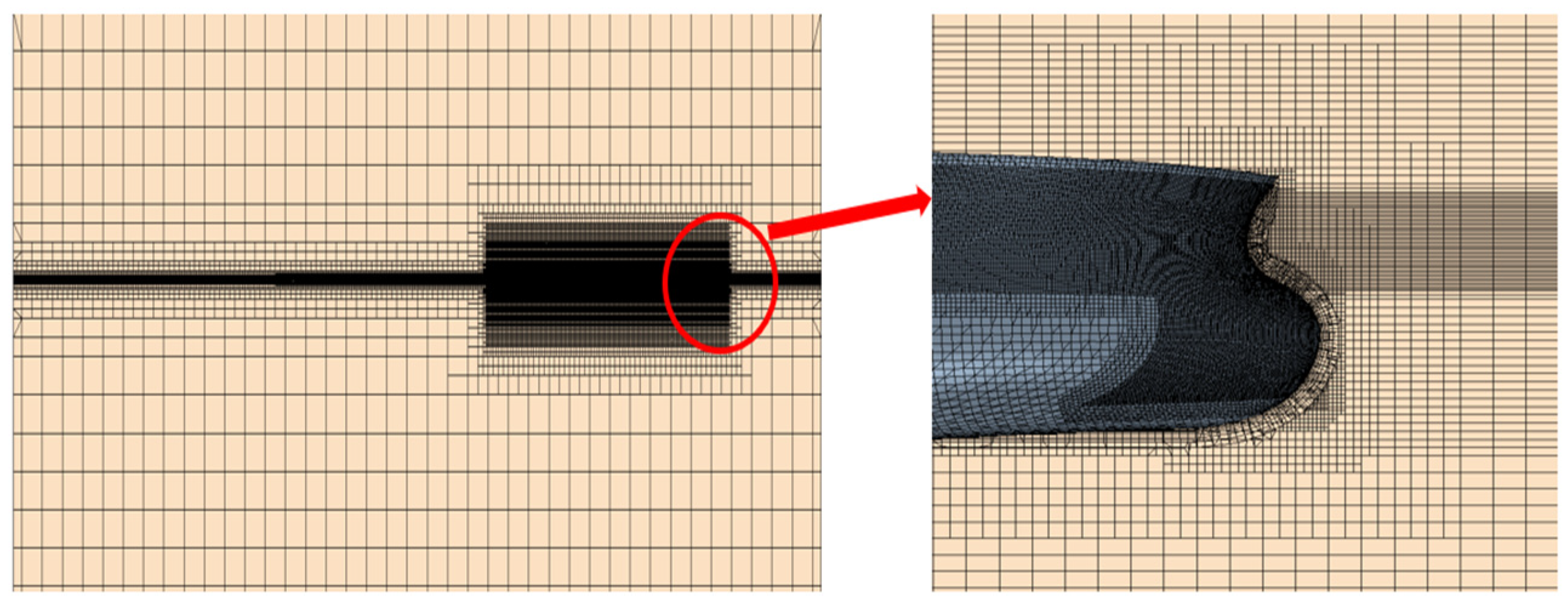
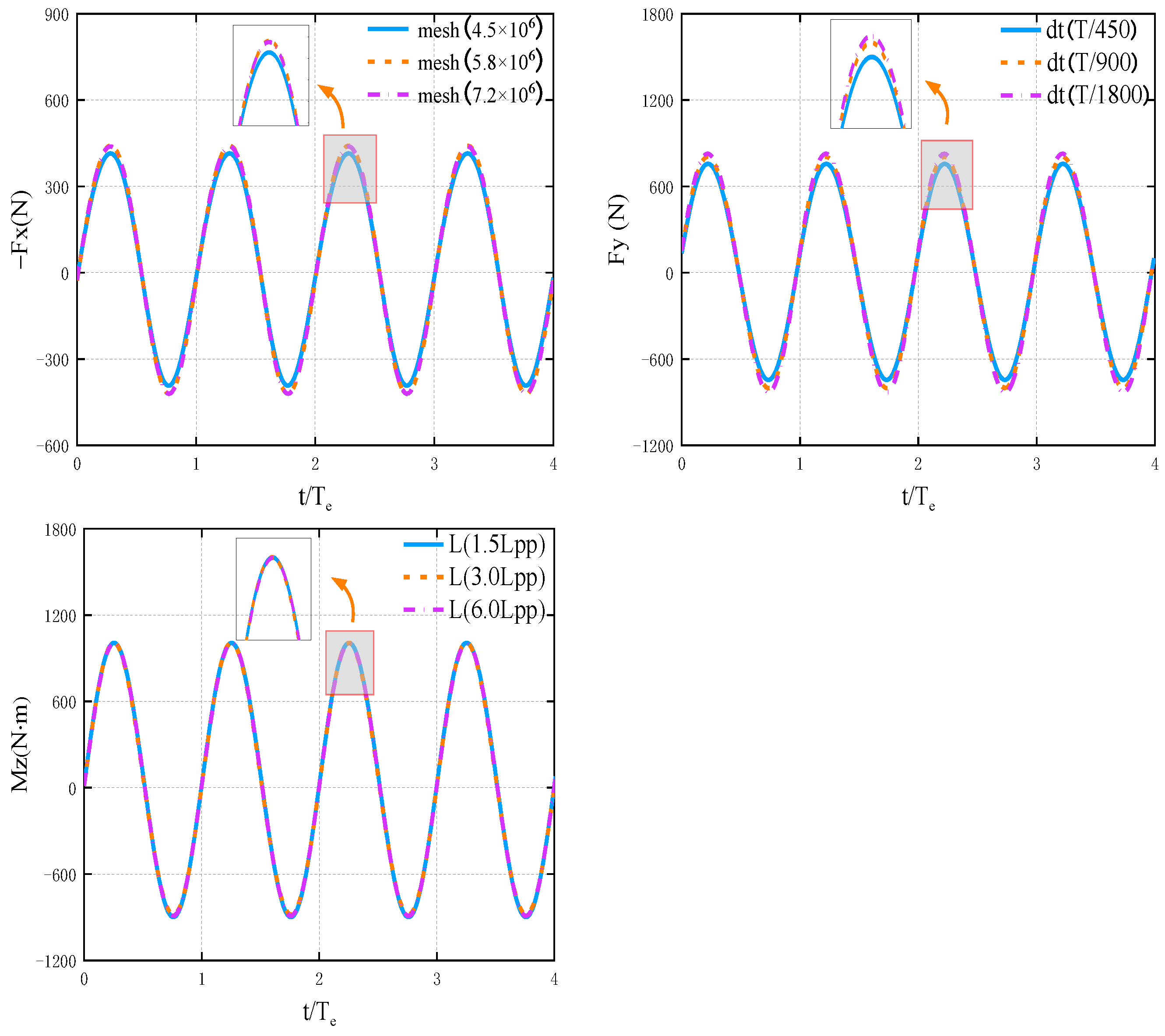
5.1. Convergence Analysis
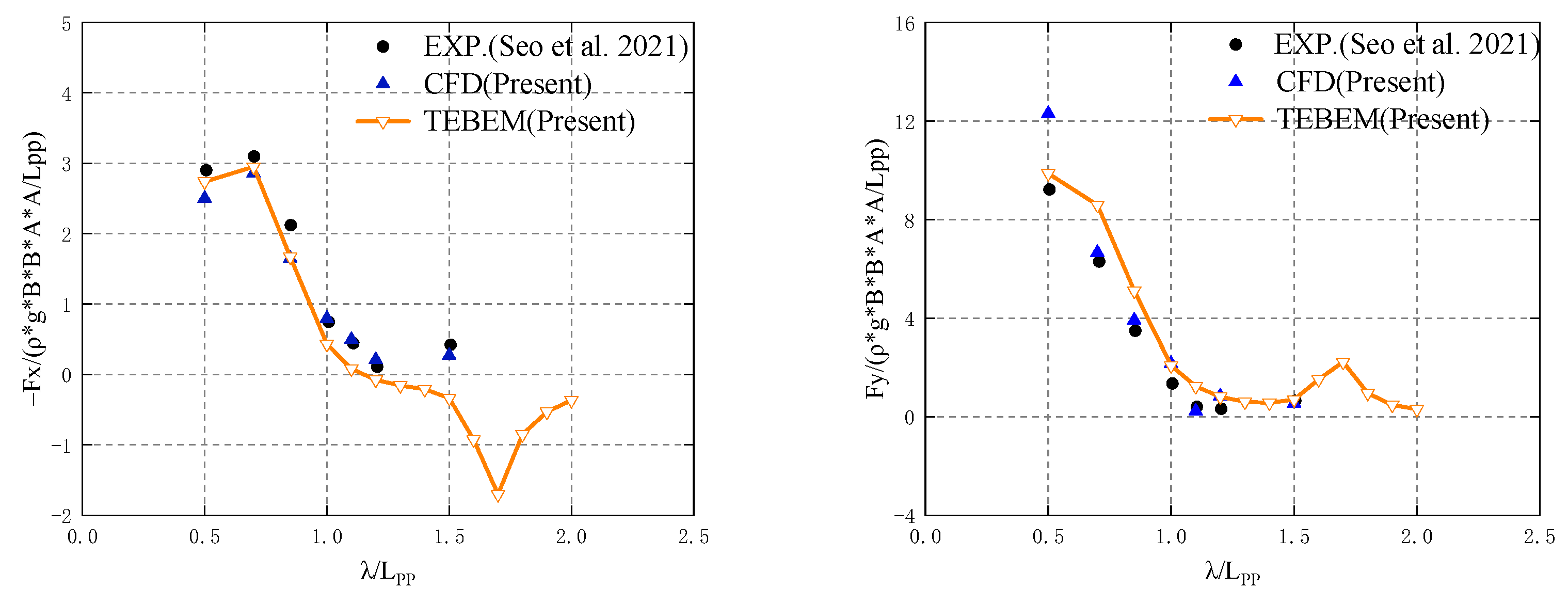
5.2. Wave Drift Loads Analysis of Ships with Zero Drift Angle in Oblique Waves
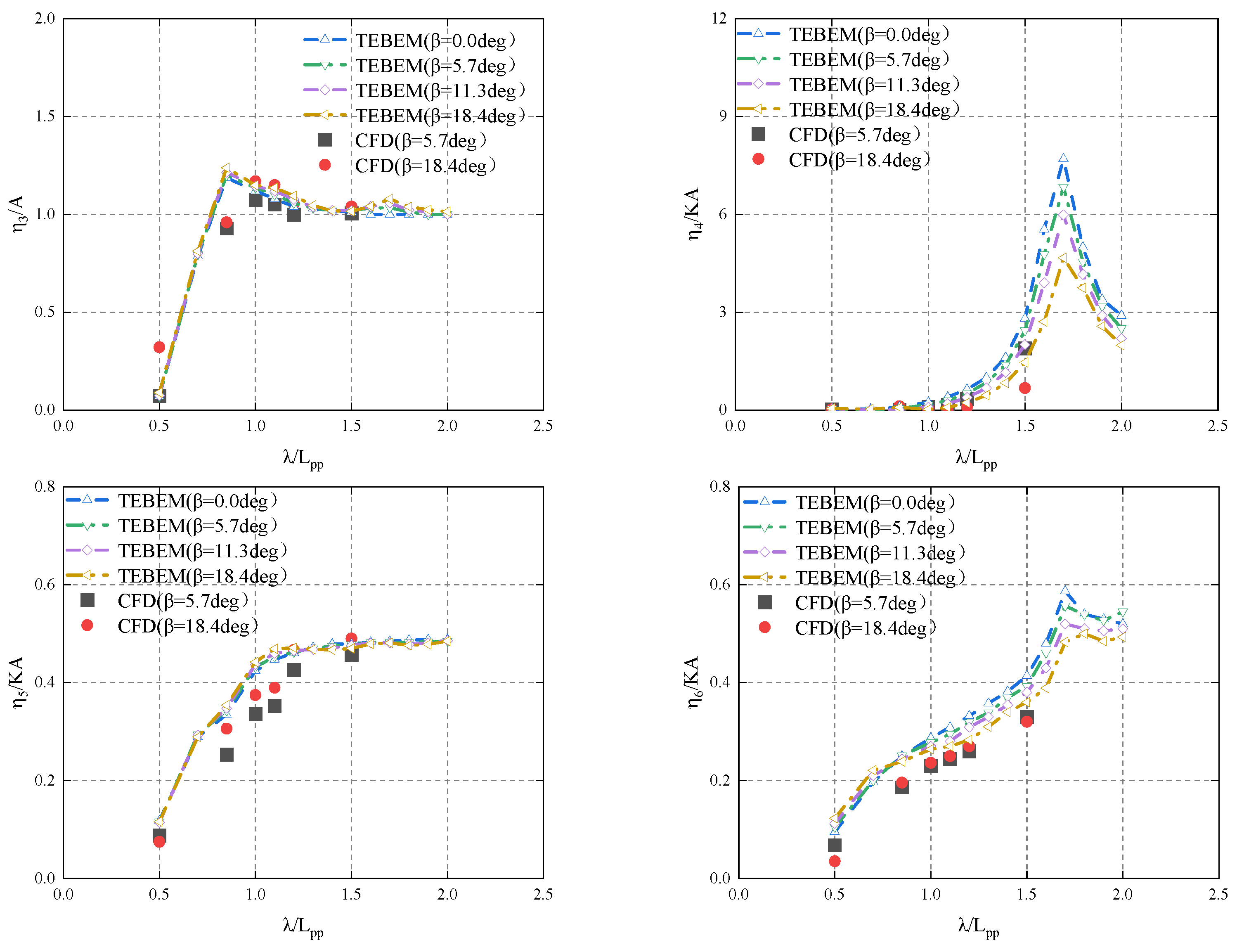
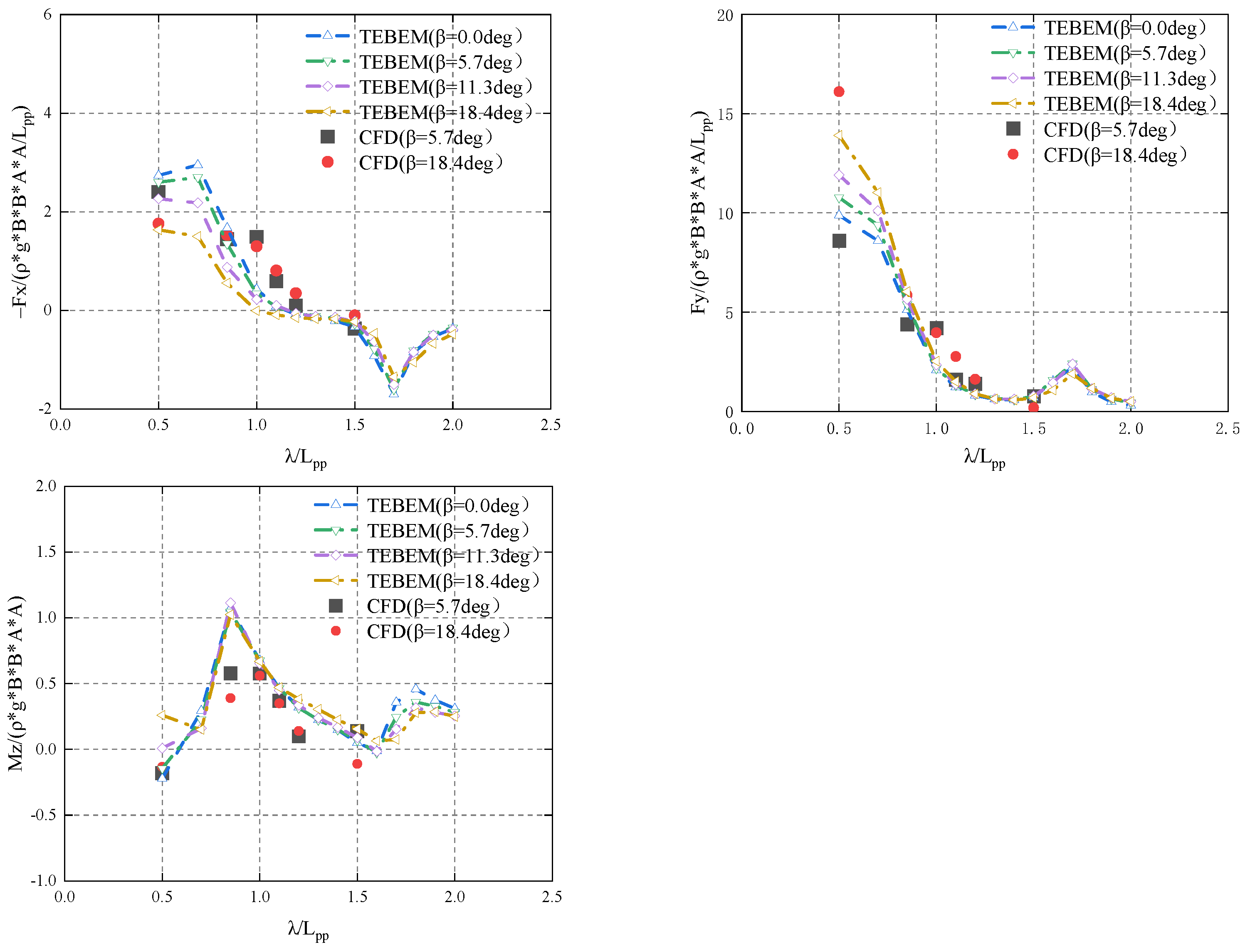
5.3. Wave Drift Loads Analysis of Ships with Different Drift Angles in Oblique Waves
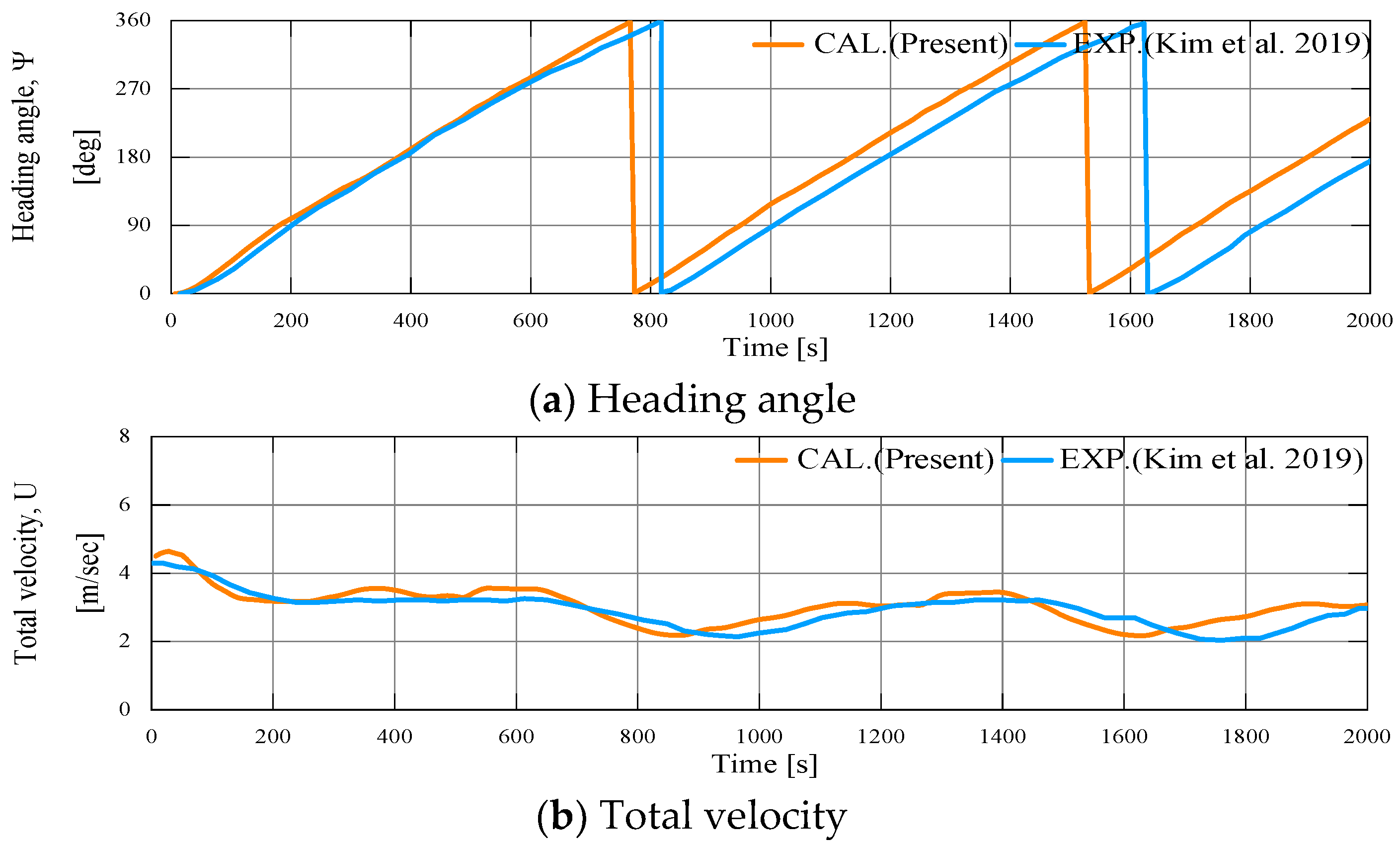
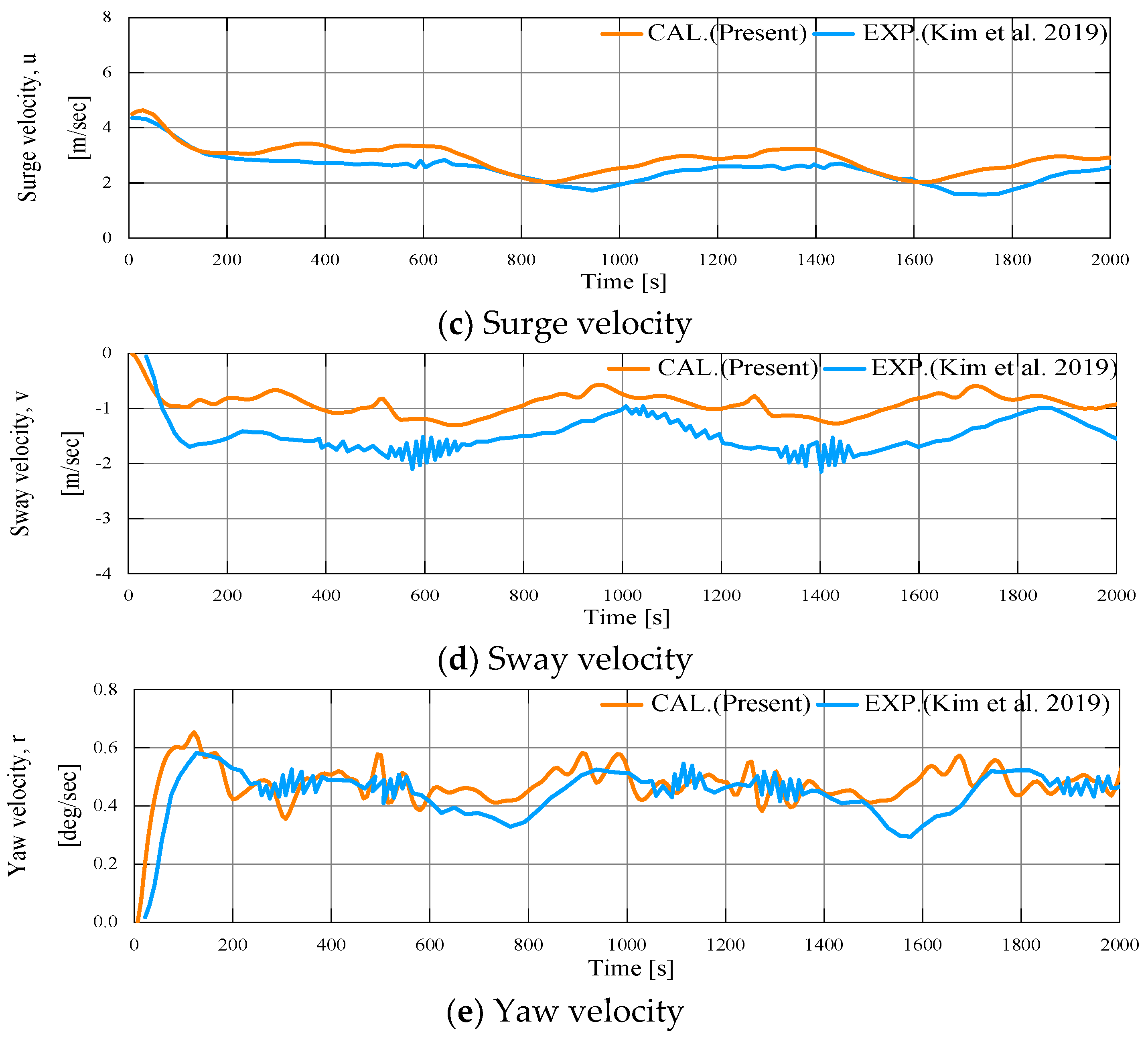
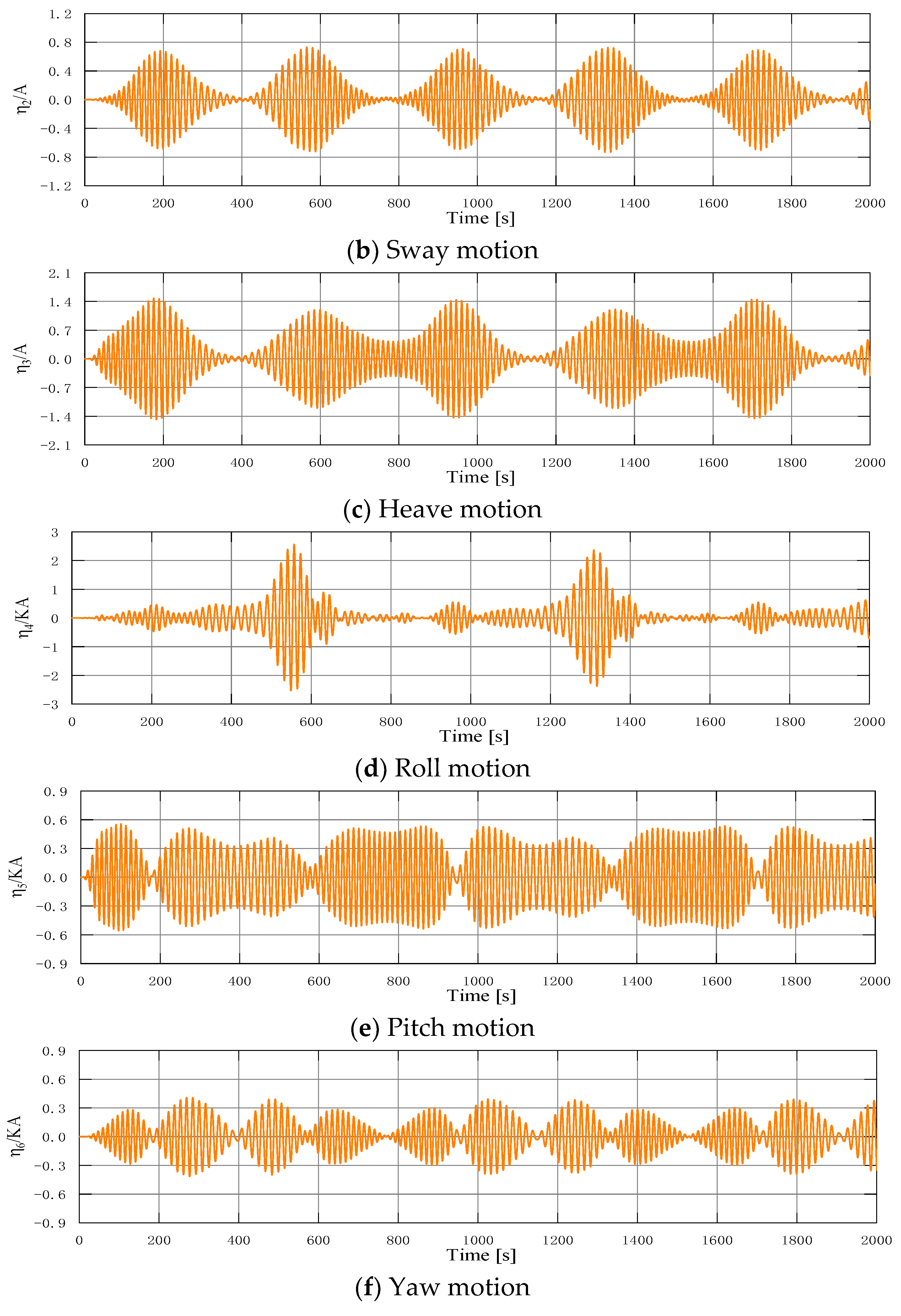
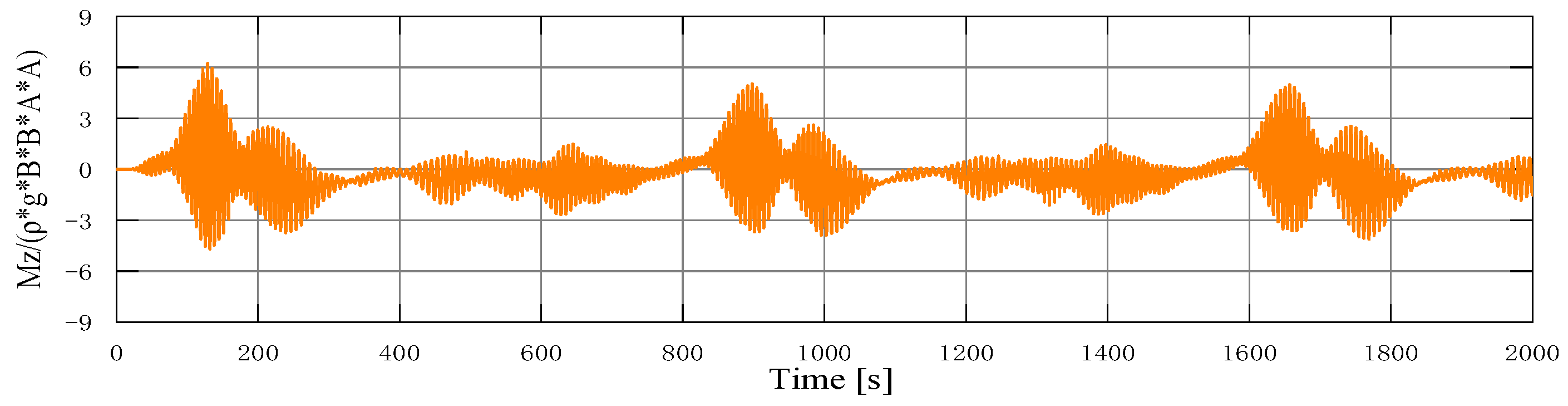
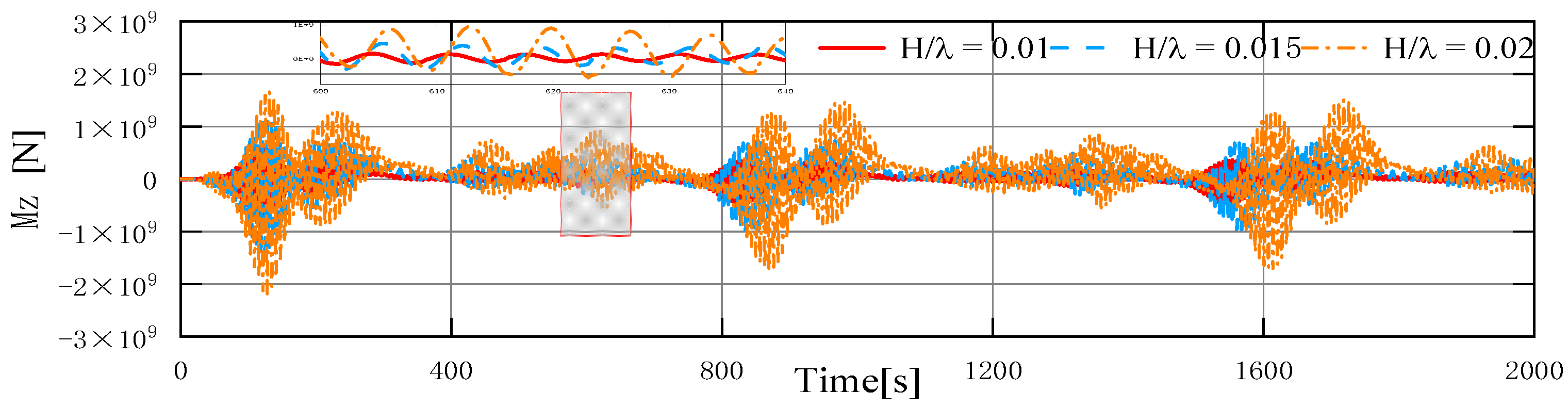
5.4. Time History of Turning Motion in Regular Waves
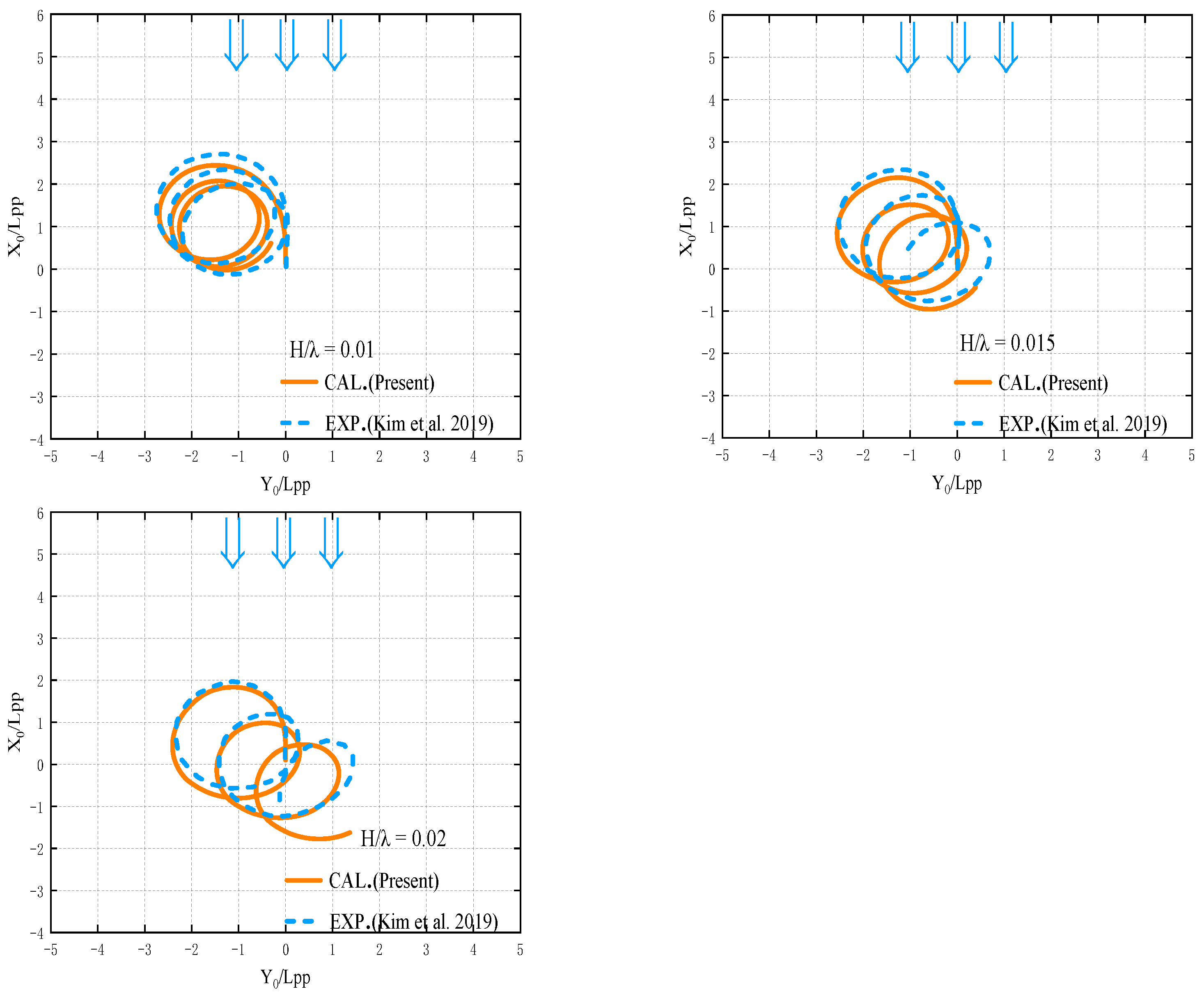
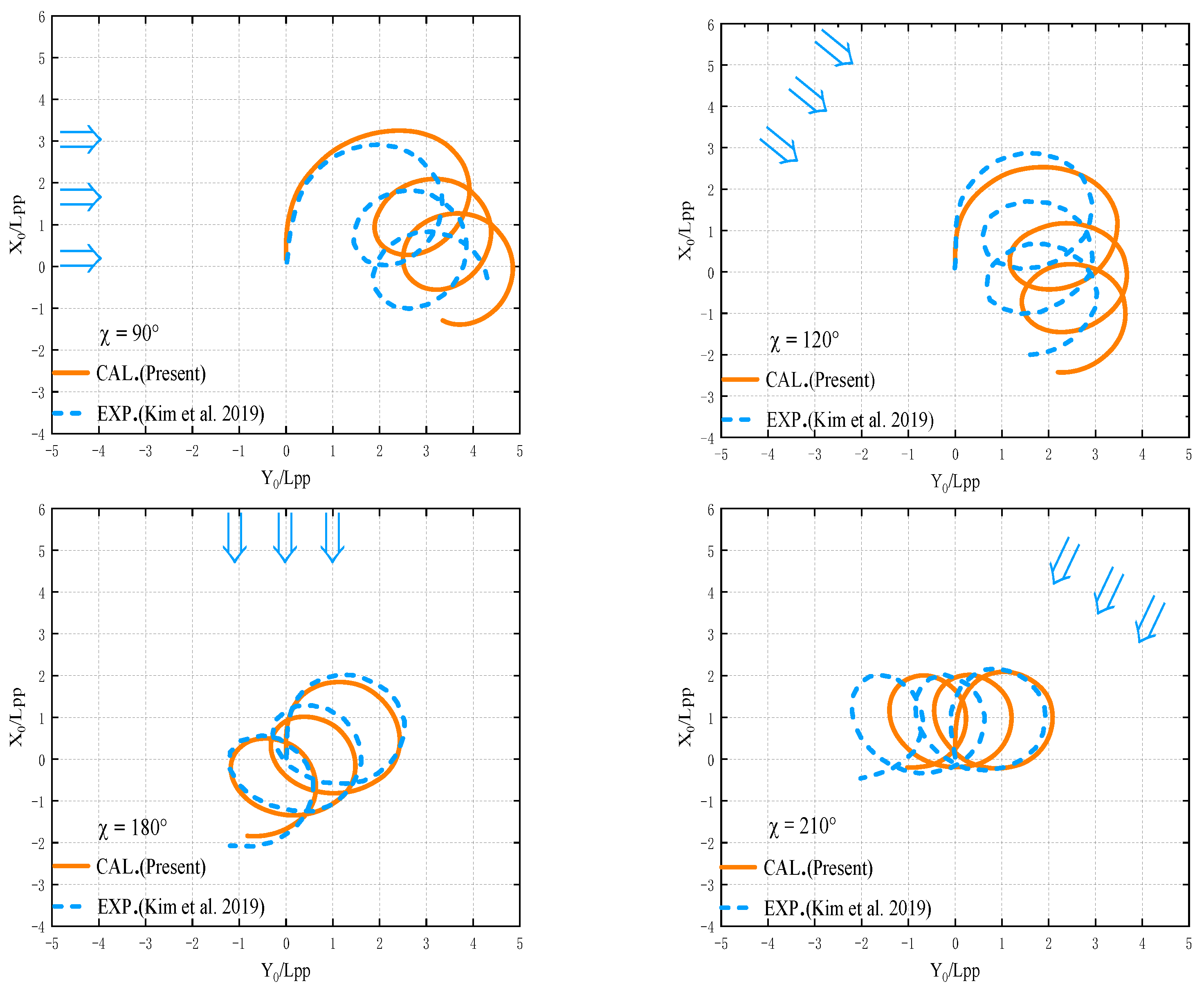
5.5. Simulations of the Turning Trajectory in Regular Waves
5.6. Analysis of Trajectory Drifting Angle and Distances
6. Conclusions
- 1.
- The drift angle has a certain effect on the wave drift loads of the ship. In particular, when λ/LPP ≤ 1.0, the surge drift force gradually decreases while the sway drift force gradually increases with the increase of the drift angle.
- 2.
- Although there are some discrepancies between the numerical and experimental results, the numerical simulation results are still acceptable for the turning trajectory of the KVLCC2 model. The simulated turning trajectories of the ship show that the incident wave significantly influences the ship’s turning motion, and the drifting distance increases with the increase in wave steepness. When λ/LPP = 1.0, the relation angle between trajectory drifts and wave propagation directions is the largest. The numerical results also show that the turning trajectories of the ship change significantly with the change in wave heading.
- 3.
- The two-time scale model based on TEBEM can effectively solve the turning trajectories of ships in regular waves using maneuvering coefficients and hydrodynamic derivatives in calm water.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yasukawa, H. Simulation of ship maneuvering in waves (1st report: Turning motion). J. Jpn. Soc. Nav. Archit. Ocean Eng. 2006, 4, 127–136. [Google Scholar] [CrossRef] [Green Version]
- Yasukawa, H. Simulation of ship maneuvering in waves (2nd report: Zig-zag and stopping maneuvers). J. Jpn. Soc. Nav. Archit. Ocean Eng. 2008, 7, 163–170. [Google Scholar] [CrossRef] [Green Version]
- Yasukawa, H.; Nakayama, Y. 6-DOF simulations of a turning ship in regular waves. In Proceedings of the International Con-ference on Marine Simulation and Ship Maneuverability, Panama City, Panama, 17–20 August 2009. [Google Scholar]
- Yasukawa, H.; Hirata, N.; Yonemasu, L.; Terada, D.; Matsuda, A. Maneuvering simulation of a KVLCC2 tanker in irregular waves. In Proceedings of the International Conference on Marine Simulation and Ship Maneuverability, Newcastle upon Tyne, UK, 8–11 September 2015. [Google Scholar]
- Xu, Y.; Bao, W.; Kinoshita, T.; Itakura, H. A PMM experimental research on ship maneuverability in waves. In Proceedings of the 26th International Conference on Offshore Mechanics and Artic Engineering, San Diego, CA, USA, 10–15 June 2007. [Google Scholar]
- Kinoshita, T.; Bao, W.; Yoshida, M.; Nihei, Y.; Xu, Y.; Itakura, H. Effects of wave drift forces on maneuvering of ship. In Proceedings of the 27th International Conference on Offshore Mechanics and Artic Engineering, Estoril, Portugal, 15–20 June 2008. [Google Scholar]
- Lee, S.K.; Hwang, S.H.; Yun, S.W.; Rhee, K.P.; Seong, W.J. An experimental study of a ship maneuverability in regular waves. In Proceedings of the International Conference on Marine Simulation and Ship Maneuverability (MARSIM), Panama City, Panama, 17–20 August 2009. [Google Scholar]
- Kim, D.J.; Yun, K.; Park, J.Y.; Yeo, D.J.; Kim, Y.G. Experimental investigation on turning characteristics of KVLCC2 tanker in regular waves. Ocean Eng. 2019, 175, 197–206. [Google Scholar] [CrossRef]
- Kim, H.; Akinoto, H.; Islam, H. Estimation of the hydrodynamic derivatives by RANS simulation of planar motion mechanism test. Ocean Eng. 2015, 108, 129–139. [Google Scholar] [CrossRef]
- Shang, H.D.; Zhan, C.S.; Liu, Z.Y. Numerical simulation of ship maneuvers through self-propulsion. J. Marine Sci. Eng. 2021, 9, 1017. [Google Scholar] [CrossRef]
- Ma, C.Q.; Hino, T.; Ma, N. Numerical investigation of the influence of wave parameters on maneuvering hydrodynamic derivatives in regular head waves. Ocean Eng. 2022, 244, 110394. [Google Scholar] [CrossRef]
- Hamamoto, M.; Kim, Y.-S. A new coordinate system and the equations describing maneuvering motion of a ship in waves. J. Soc. Nav. Archit. Japan 1993, 173, 209–220. [Google Scholar] [CrossRef]
- Sutulo, S.; Soares, C.G. A unified nonlinear mathematical model for simulating ship maneuvering and seakeeping in regular waves. In Proceedings of the International Conference on Marine Simulation and Ship Maneuverability, Terschelling, The Netherlands, 25–30 June 2006. [Google Scholar]
- Fang, M.C.; Luo, J.H.; Lee, M.L. A nonlinear mathematical model for ship turning circle simulation in waves. J. Ship Res. 2005, 49, 69–79. [Google Scholar] [CrossRef]
- Lin, W.; Zhang, S.; Weems, K.; Liut, D. Numerical simulations of ship maneuvering in waves. In Proceedings of the 26th Symposium on Naval Hydrodynamics, Rome, Italy, 17–22 September 2006. [Google Scholar]
- Subramanian, R.; Beck, R.F. A time-domain strip theory approach to maneuvering in a seaway. Ocean Eng. 2015, 104, 107–118. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, R.; Ueno, M.; Tsukada, Y. Numerical simulation of 6-degrees-of-freedom motions for a manoeuvring ship in regular waves. Appl. Ocean Res. 2021, 113, 102732. [Google Scholar] [CrossRef]
- Seo, M.G.; Kim, Y.H. Numerical analysis on ship maneuvering coupled with ship motion in waves. Ocean Eng. 2011, 38, 1934–1945. [Google Scholar] [CrossRef]
- Zhang, W.; Zou, Z.J. A numerical study on prediction of ship maneuvering in waves. In Proceedings of the 30th International Workshop on Water Waves and Floating Bodies, Bristol, UK, 12–15 April 2015. [Google Scholar]
- Xie, Z.T.; Jeffery, F.; Wang, H. A framework of numerically evaluating a maneuvering vessel in waves. J. Marine Sci. Eng. 2020, 8, 392. [Google Scholar] [CrossRef]
- Yao, J.X.; Liu, Z.Y.; Su, Y.; Cheng, X.D.; Song, X.M.; Zhan, C.S. A time-averaged method for ship maneuvering prediction in waves. J. Ship Res. 2020, 64, 203–225. [Google Scholar] [CrossRef]
- Mei, T.L.; Liu, Y.; Ruiz, M.T.; Lataire, E.; Vantorre, M.; Chen, C.Y.; Zou, Z.J. A hybrid method for predicting ship maneuverability in regular waves. J. Offshore Mech. Artic Eng. Trans. ASME 2021, 143, 021203. [Google Scholar] [CrossRef]
- Jeon, M.; Mai, T.L.; Yoon, H.K.; Kim, D.J. Estimation of wave-induced steady force using system identification, model tests, and numerical approach. Ocean Eng. 2021, 233, 109207. [Google Scholar] [CrossRef]
- Yasukawa, H.; Hirata, N.; Matsumoto, A.; Kuroiwa, R.; Mizokami, S. Evaluations of wave-induced steady forces and turning motion of a full hull ship in waves. Ocean Eng. 2019, 24, 1–15. [Google Scholar] [CrossRef]
- Zhang, W.; el Moctar, O.; Schellin, T.E. Numerical study on wave-induced motions and steady wave drift forces for ships in oblique waves. Ocean Eng. 2020, 196, 106206. [Google Scholar] [CrossRef]
- Duan, W.Y.; Chen, J.K.; Zhao, B.B. Second order Taylor expansion boundary element method for the second order wave radiation problem. Appl. Ocean Res. 2015, 52, 12–26. [Google Scholar] [CrossRef]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.K.; Duan, W.Y.; Ma, S.; Liao, K.P. Time-domain TEBEM method for mean drift force and moment of ships with forward speed under the oblique seas. J. Marine Sci. Tech. 2021, 26, 1001–1013. [Google Scholar] [CrossRef]
- Seo, M.G.; Ha, Y.J.; Nam, B.W.; Kim, Y. Experimental and Numerical Analysis of Wave Drift Force on KVLCC2 Moving in Oblique Waves. J. Marine Sci. Eng. 2021, 9, 136. [Google Scholar] [CrossRef]





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Full Scale | Model | |
|---|---|---|
| Scale | 1.00 | 1/45.7 |
| Ship length, LPP (m) | 320.0 | 7.00 |
| Breadth, B (m) | 58.0 | 1.27 |
| Draught, d (m) | 20.8 | 0.455 |
| Displacement, ∇ (m3) | 312,600 | 3.27 |
| Block coefficient, Cb | 0.81 | 0.81 |
| Longitudinal coordinate of the center of gravity of the ship, xG (m) | 11.2 | 0.25 |
| Radius of gyration, kxx, kyy, kzz (m) | 19.33, 76.78,76.78 | 0.423, 1.68, 1.68 |
| Propeller diameter, Dp (m) | 9.86 | 0.216 |
| Rudder height, HR (m) | 15.80 | 0.345 |
| Rudder area, AR (m2) | 112.5 | 0.0539 |
| Coefficient | Value | Coefficient | Value | Coefficient | Value |
|---|---|---|---|---|---|
| 0.022 | 0.022 | 0.387 | |||
| 0.223 | −0.137 | 0.388 | |||
| 0.011 | −0.049 | 0.312 | |||
| −0.040 | −0.030 | −0.464 | |||
| 0.002 | −0.294 | −0.710 | |||
| 0.011 | 0.055 | 1.09 | |||
| 0.771 | −0.013 | 0.50 | |||
| −0.315 | 0.220 | 2.747 | |||
| 0.083 | 2.0 | 0.2931 | |||
| −1.607 | > 0) | 1.6 | −0.2753 | ||
| 0.379 | < 0) | 1.1 | −0.1385 | ||
| −0.391 | > 0) | 0.640 | |||
| 0.008 | < 0) | 0.395 |
| Rudder Angle, δ (degree) | Wave Heading, χ (degree) | Wave Height, H (LPP) | Wavelength, λ (LPP) | Propeller RPS |
|---|---|---|---|---|
| +35, −35 | No wave (in calm water) | 11.8 | ||
| +35, −35 | 90, 180 | 0.02 | 0.5, 0.7, 1.0, 1.2 | |
| +35 | 120, 210 | 0.02 | 1.0 | |
| −35 | 180 | 0.01, 0.015, 0.02 | 1.0 | |
| Wave Headings [°] | Advances (AD/LPP) | Tactical Diameters (DT/LPP) |
|---|---|---|
| 90 | 3.2 | 3.8 |
| 120 | 2.6 | 3.5 |
| 180 | 1.8 | 2.4 |
| 210 | 2.2 | 2.0 |
| δ [°] | χ [°] | H/LPP | λ /LPP | Method | Adr090–450 | Adr180–540 | Adr270–630 | Adr360–720 |
|---|---|---|---|---|---|---|---|---|
| +35 | 180 | 0.02 | 0.5 | Exp. | 172 | 175 | 173 | 171 |
| Cal. | 185 | 171 | 171 | 170 | ||||
| Error | 7.56% | −2.29% | −1.16% | −0.59% | ||||
| 0.7 | Exp. | 154 | 147 | 148 | 143 | |||
| Cal. | 144 | 124 | 121 | 121 | ||||
| Error | −6.49% | −15.65% | −18.24% | −15.38% | ||||
| 1.0 | Exp. | 135 | 125 | 128 | 129 | |||
| Cal. | 141 | 124 | 121 | 122 | ||||
| Error | 4.44% | −0.8% | −5.47% | −5.43% | ||||
| 1.2 | Exp. | 160 | 146 | 143 | 163 | |||
| Cal. | 152 | 106 | 99 | 108 | ||||
| Error | 5.0% | −27.40% | −30.77% | 33.74% |
| δ [°] | χ [°] | H/LPP | λ /LPP | Method | Ddr090–450 | Ddr180–540 | Ddr270–630 | Ddr360–720 |
|---|---|---|---|---|---|---|---|---|
| +35 | 180 | 0.02 | 0.5 | Exp. | 2.09 | 2.55 | 2.24 | 2.28 |
| Cal. | 2.30 | 2.07 | 2.04 | 2.01 | ||||
| Error | 10.05% | −18.82% | −8.93% | −11.84% | ||||
| 0.7 | Exp. | 2.03 | 2.26 | 2.16 | 2.46 | |||
| Cal. | 2.10 | 2.27 | 2.15 | 2.04 | ||||
| Error | 3.45% | 0.44% | −0.46% | 17.07% | ||||
| 1.0 | Exp. | 0.97 | 1.11 | 1.10 | 1.16 | |||
| Cal. | 1.06 | 1.15 | 1.04 | 1.01 | ||||
| Error | 9.28% | 3.60% | −5.45% | −12.93% | ||||
| 1.2 | Exp. | 0.36 | 0.41 | 0.35 | 0.47 | |||
| Cal. | 0.49 | 0.59 | 0.55 | 0.44 | ||||
| Error | 36.11% | 43.90% | 57.14% | −0.67% |
| δ [°] | χ [°] | H/LPP | λ /LPP | Method | Adr090–450 | Adr180–540 | Adr270–630 | Adr360–720 |
|---|---|---|---|---|---|---|---|---|
| −35 | 90 | 0.02 | 0.5 | Exp. | 272 | 273 | - | - |
| Cal. | 256 | 260 | - | - | ||||
| Error | −5.88% | −4.76% | - | - | ||||
| 0.7 | Exp. | 309 | 307 | 309 | 307 | |||
| Cal. | 301 | 306 | 312 | 311 | ||||
| Error | −2.59% | −0.33% | 0.97% | 1.30% | ||||
| 1.0 | Exp. | 332 | 323 | 328 | 329 | |||
| Cal. | 302 | 308 | 297 | 297 | ||||
| Error | −9.04% | −4.64% | −9.45% | 9.73% | ||||
| 1.2 | Exp. | 55 | 286 | 296 | 317 | |||
| Cal. | 274 | 297 | 289 | 285 | ||||
| Error | - | 3.85% | −2.36% | −10.09% |
| δ [°] | χ [°] | H/LPP | λ /LPP | Method | Ddr090–450 | Ddr180–540 | Ddr270–630 | Ddr360–720 |
|---|---|---|---|---|---|---|---|---|
| −35 | 90 | 0.02 | 0.5 | Exp. | 2.29 | 2.61 | - | - |
| Cal. | 2.63 | 2.89 | - | - | ||||
| Error | 14.85% | 10.73% | - | - | ||||
| 0.7 | Exp. | 1.92 | 2.10 | 2.15 | 2.19 | |||
| Cal. | 1.63 | 1.93 | 2.0 | 2.03 | ||||
| Error | −15.10% | −8.10% | −6.98% | −7.31% | ||||
| 1.0 | Exp. | 0.66 | 0.86 | 0.91 | 0.88 | |||
| Cal. | 0.91 | 1.04 | 0.96 | 0.93 | ||||
| Error | 37.88% | 10.93% | 5.50% | 5.68% | ||||
| 1.2 | Exp. | 0.12 | 0.18 | 0.32 | 0.38 | |||
| Cal. | 0.31 | 0.47 | 0.52 | 0.50 | ||||
| Error | - | - | 62.5% | 31.56% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.-K.; Zhang, G.-D.; Duan, W.-Y. Numerical Study of Wave Drift Load and Turning Characteristics of KVLCC2 Ship in Regular Waves Based on TEBEM. J. Mar. Sci. Eng. 2022, 10, 993. https://doi.org/10.3390/jmse10070993
Chen J-K, Zhang G-D, Duan W-Y. Numerical Study of Wave Drift Load and Turning Characteristics of KVLCC2 Ship in Regular Waves Based on TEBEM. Journal of Marine Science and Engineering. 2022; 10(7):993. https://doi.org/10.3390/jmse10070993
Chicago/Turabian StyleChen, Ji-Kang, Guo-Dong Zhang, and Wen-Yang Duan. 2022. "Numerical Study of Wave Drift Load and Turning Characteristics of KVLCC2 Ship in Regular Waves Based on TEBEM" Journal of Marine Science and Engineering 10, no. 7: 993. https://doi.org/10.3390/jmse10070993