3.2. The Effect of Vertical Loading Amplitude
Four groups of a load amplitude of
= 0.6, 0.8, 0.9, and 1.0
with vertical cyclic loading were set to explore the influence of the vertical load amplitude on the uplift resistance capacity.
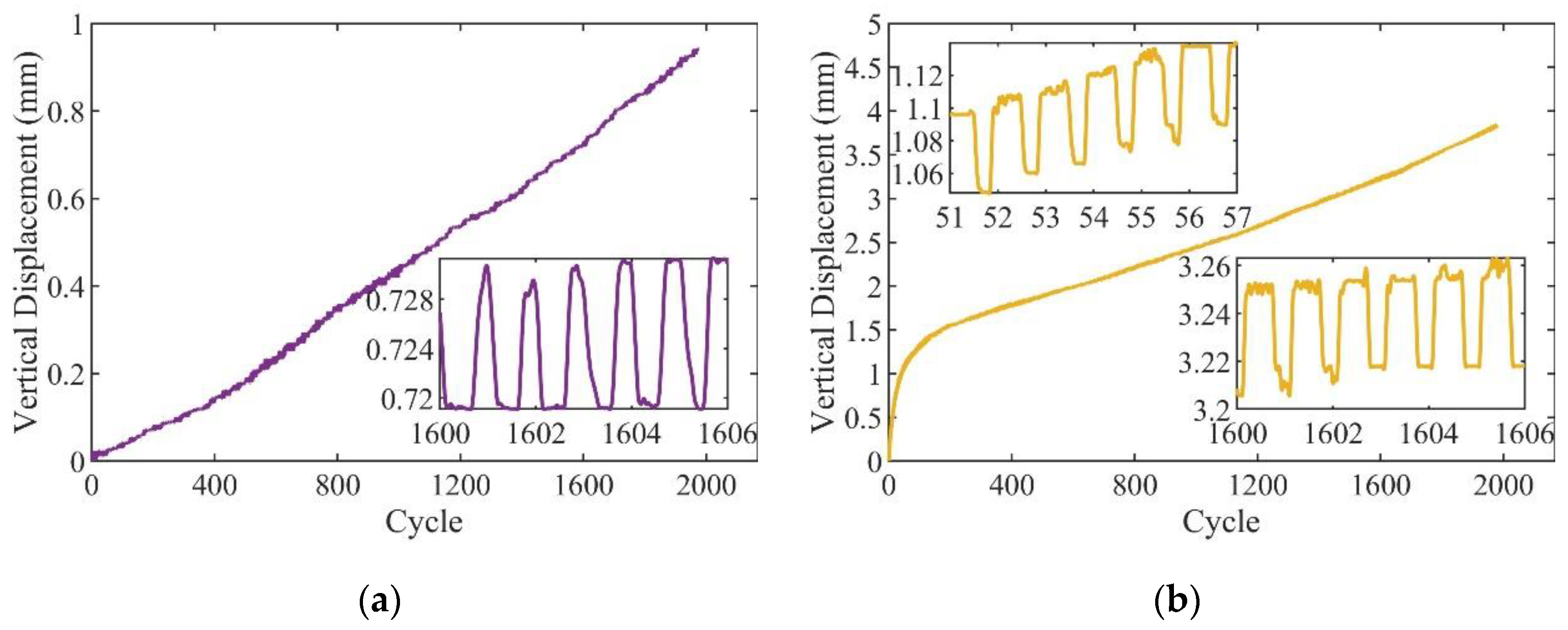
Figure 7 shows the time history of the displacement with variable loading amplitudes under vertical cyclic loading. The
x-axis in the figure is the number of load cycles, and the
y-axis is the vertical displacement of the top of the model anchor piles. It can be seen from the figure that the cumulative displacements generated by variable loading amplitudes, and the displacements generated by the pile top in a single cycle both were different. The displacement generated in the cyclic loading can be divided into two categories [
29]: The first is elastic displacement, the displacement generated when the load increases in a single cycle, and the displacement disappears when the load decreases. The magnitude of the elastic displacement is related to the stiffness of the clay. The other type is cumulative displacement, which is permanent displacement caused by an increase in loading time during the loading process. Cumulative displacement is related to the plastic deformation of the clay.
Jardine et al. [
20] summarized three types of motion characteristics of anchor piles under cyclic loads: (1) Stable: under unidirectional or bidirectional loads, the displacement of the pile top slowly accumulates over hundreds of cycles. (2) Unstable: under one-way or two-way loads, the displacement develops rapidly, resulting in failure when the number of cycles is less than 300. (3) Metastable: the pile head displacement accumulates at a moderate rate within tens to hundreds of cycles, and fails when the accumulated displacement reaches a certain value. According to the above research conclusions, this research will analyze the uplift resistance of anchor piles under different test conditions, considering three aspects: the cumulative displacement change trend, the soil stiffness degradation, and the number of cycles at destruction.
Figure 7a shows the result of loading amplitude
= 0.6
. It can be seen from the figure that the growth rate of the cumulative displacement during the loading process is basically the same, and the final cumulative displacement is 0.9 mm after two thousand loadings.
Figure 7b shows that the result of the loading amplitude is
= 0.8
. The anchor piles were not pulled out during the loading process, but an obvious cumulative displacement was generated. The cumulative displacement growth rate was fast in the initial stage and then became slow. The first 400 cycles produced a cumulative displacement of 1.5 mm, and in the last 1600 cycles, the cumulative displacement increased by 2.3 mm. After 2000 cycles, in case of
= 0.6 and 0.8
the anchor piles were not pulled out, but the displacement development mode and the final cumulative displacement were different in these two cases. This indicates that when the cyclic loading amplitudes were
= 0.6
and 0.8
, the anchor piles could still remain stable after loading for 3.5 h in actual marine aquaculture.
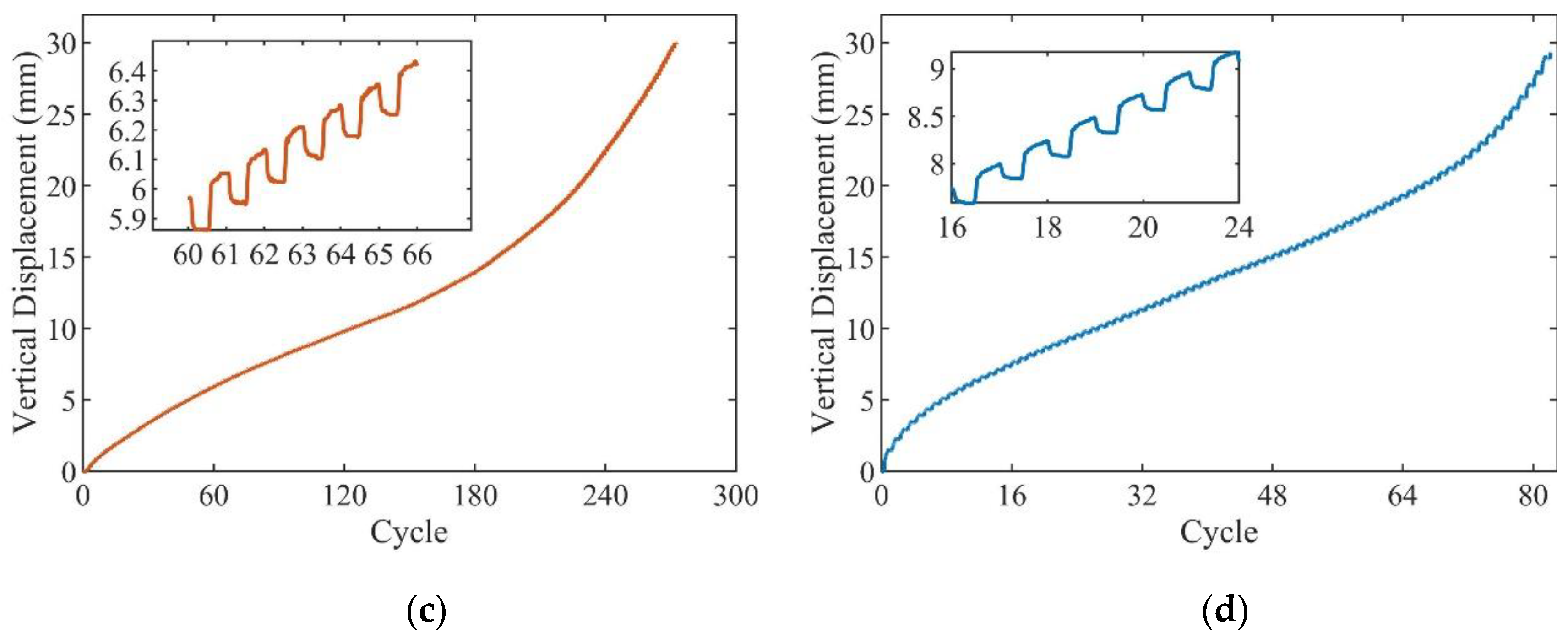
Figure 7c,d are the experimental results of the loading amplitudes
= 0.9
and 1.0
, respectively. It can be seen from the figure that the displacement development trend of the two working conditions under the action of cyclic loads are similar. The pile top displacement increases with the increase in the number of cycles, and the cumulative displacement growth rate first decreases and then increases. It can be seen from the subfigure in
Figure 7c,d that the preset maximum displacement is reached when N (number of cycles) = 285 and 85 times, and the model anchor pile is considered to be pulled out. This shows that in the actual marine aquaculture environment in regular wave loading, when the cyclic load amplitudes are
= 0.9
and 1.0
, the anchor piles will fail after 30 min and 9 min, respectively.
It can also be seen from the subfigure in
Figure 7 that when N = 1600, the elastic displacement of
= 0.6
was about 0.006 mm, and the elastic displacement of
= 0.8
was about 0.040 mm. When N = 60, the elastic displacement of
= 0.9
was about 0.12 mm. When N = 16, the elastic displacement of
= 1.0
was about 0.17 mm. As the loading amplitude increased, the elastic displacement generated by the anchor piles increased significantly. Compared with
= 0.6
, the elastic displacement of
= 0.8
was improved by about seven times, but the improvement effect was obviously reduced as the loading amplitude increased.
Cheng et al. [
30] considered that the stiffness of soft clay decreases under cyclic loading, and the degree of this stiffness degradation is related to the influence of many factors, such as the number of cycles, the magnitude of the initial tensile force, the loading amplitude, and the consolidation ratio. The generation of cumulative displacement under cyclic loading is mainly caused by the degradation of soil stiffness, which refers to the ratio of the maximum and minimum load difference to the displacement difference in each cycle in the following formula:
where
is the
i th cycle,
is the maximum tensile load on the anchor piles in a single cycle,
is the minimum tensile load on the anchor piles in a single cycle,
is the maximum displacement in a single cycle, and
is the minimum displacement in a single cycle.
In order to investigate the effect of loading amplitude on stiffness, the soil stiffness values at N = 20 in four groups of test conditions were calculated, and the results are shown in
Table 4. It can be seen from the table that the soil stiffness gradually decreased with the increase in the vertical loading amplitude, and the soil stiffness of
= 0.6
was the largest, which is 93% lower than that of
= 0.8
. The soil stiffness of
= 1.0
was the smallest, and the stiffness values of
= 0.8
,
= 0.9
, and
= 1.0
were relatively similar. This shows that the stiffness of the clay in the steady state is greater than that in the other states.
3.3. The Effect of Initial Tension Angle
Three groups of initial tension angles of 30°, 45°, and 60° with a uniform loading amplitude of 13 N were set to explore the influence of the initial tension angle on the uplift resistance capacity.
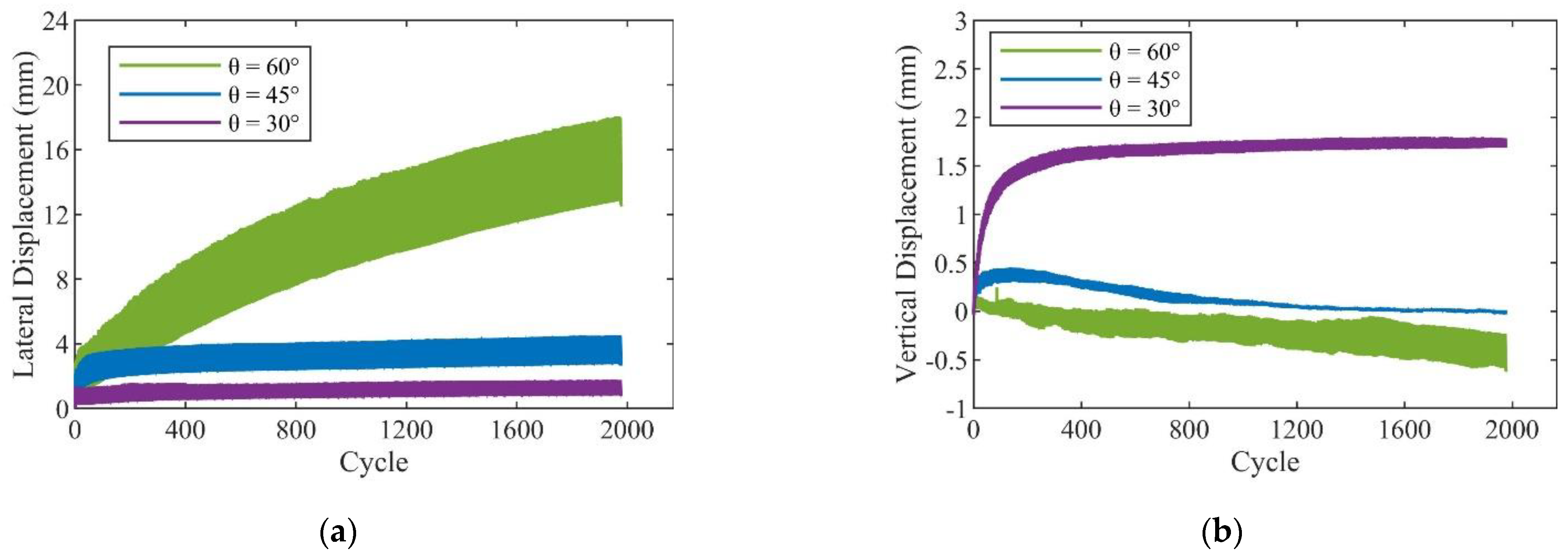
Figure 8a show the time history curve of the lateral displacement with variable initial tension angles under oblique cyclic loading. It can be seen from the figure that the lateral displacement of the clay increased with the increase in the initial tension angle, and the cumulative displacements after 2000 cycles were 0.85, 2.76, and 12.86 mm, respectively. This may be due to the increased lateral component force of the anchor pile when θ = 60°, but the lateral bearing capacity of the clay is weak, resulting in significant cumulative displacement [
15]. In addition, it can be seen from the figure that the elastic displacement in the lateral direction increases with the increase in the initial tension angle.
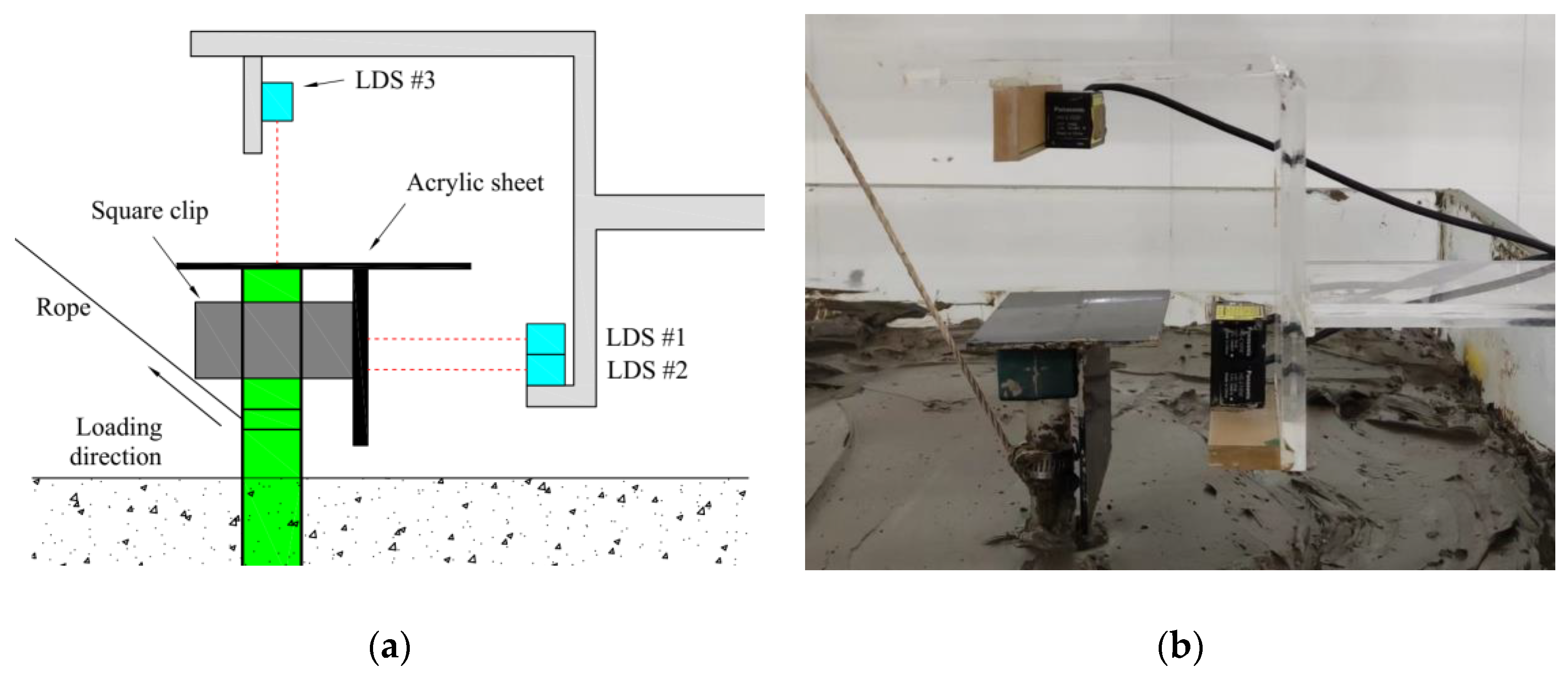
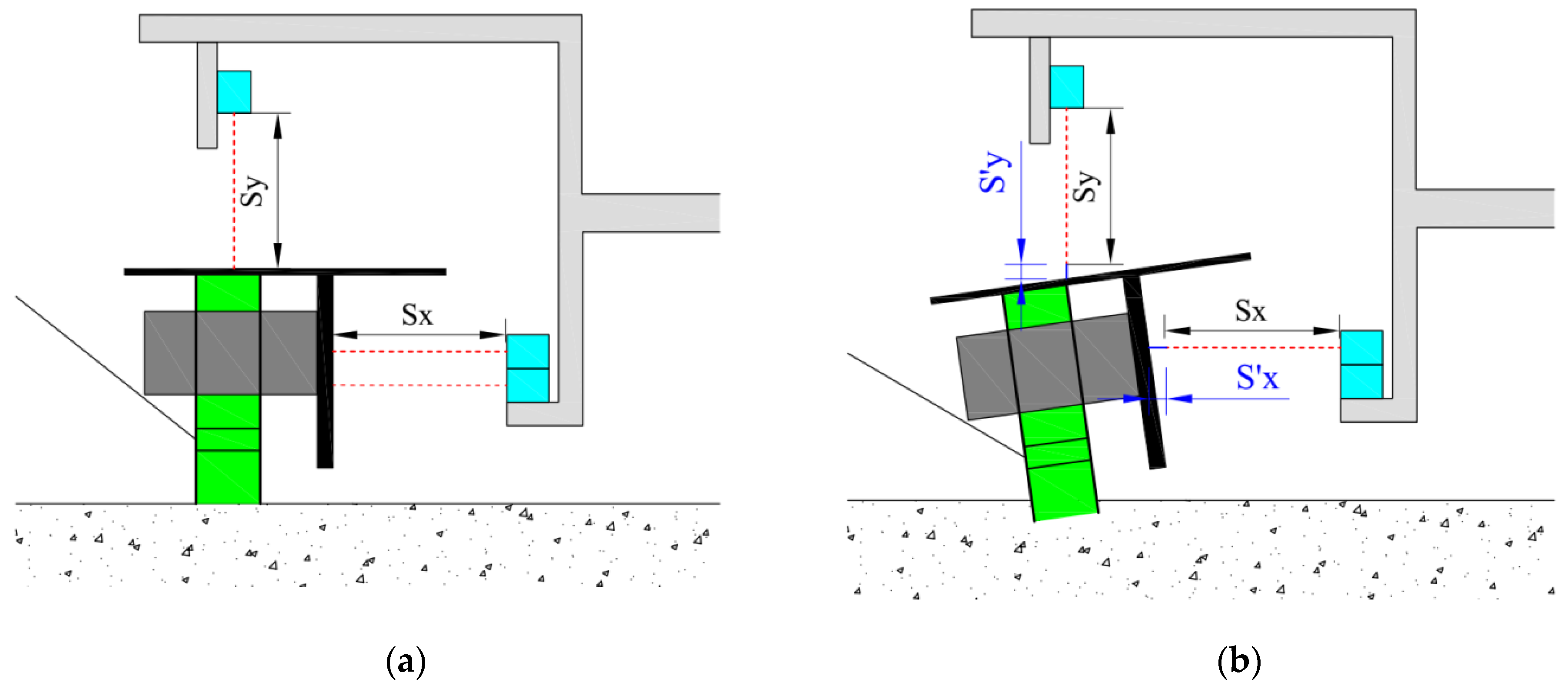
Figure 8b shows the time history of the vertical displacement with variable initial tension angles under oblique cyclic loading. The vertical displacement characteristics under variable tension angles were different. The displacement at θ = 30° gradually increased, the displacement development rate first increased and then decreased in two stages, and the final cumulative vertical displacement was 1.78 mm. The displacement at θ = 45° firstly increased and then decreased, and the final cumulative vertical displacement was –0.02 mm. The displacement at θ = 60° always decreased, and the final cumulative displacement was –0.58 mm. Negative displacement in the vertical direction means that the measured object moves away from the laser displacement sensor; that is, the anchor piles move downward. The reason for the negative displacement in the test may be the deflection of the anchor pile. The reason for the negative displacement in the test may be the deflection of the anchor pile. As shown in
Figure 9, in the initial state, the lateral and vertical displacements of the anchor piles are Sx and Sy respectively when the action of the load. After cyclic loading, the deflection deformation occurs. the anchor piles was far away from the sensor, resulting produce the displacement S’x and S’y.
As displayed in
Figure 9, the reason for the negative displacement in the experiment may lie in the deflection of the anchor piles in the process of generating the cumulative displacement, and the deflection did not change with the change in the load. When the load was reduced, the anchor piles returned to their initial position, the acrylic plate was tilted due to the deflection, and the original measurement position was far away from the sensor, resulting in a displacement in the opposite direction.
Bai et al. [
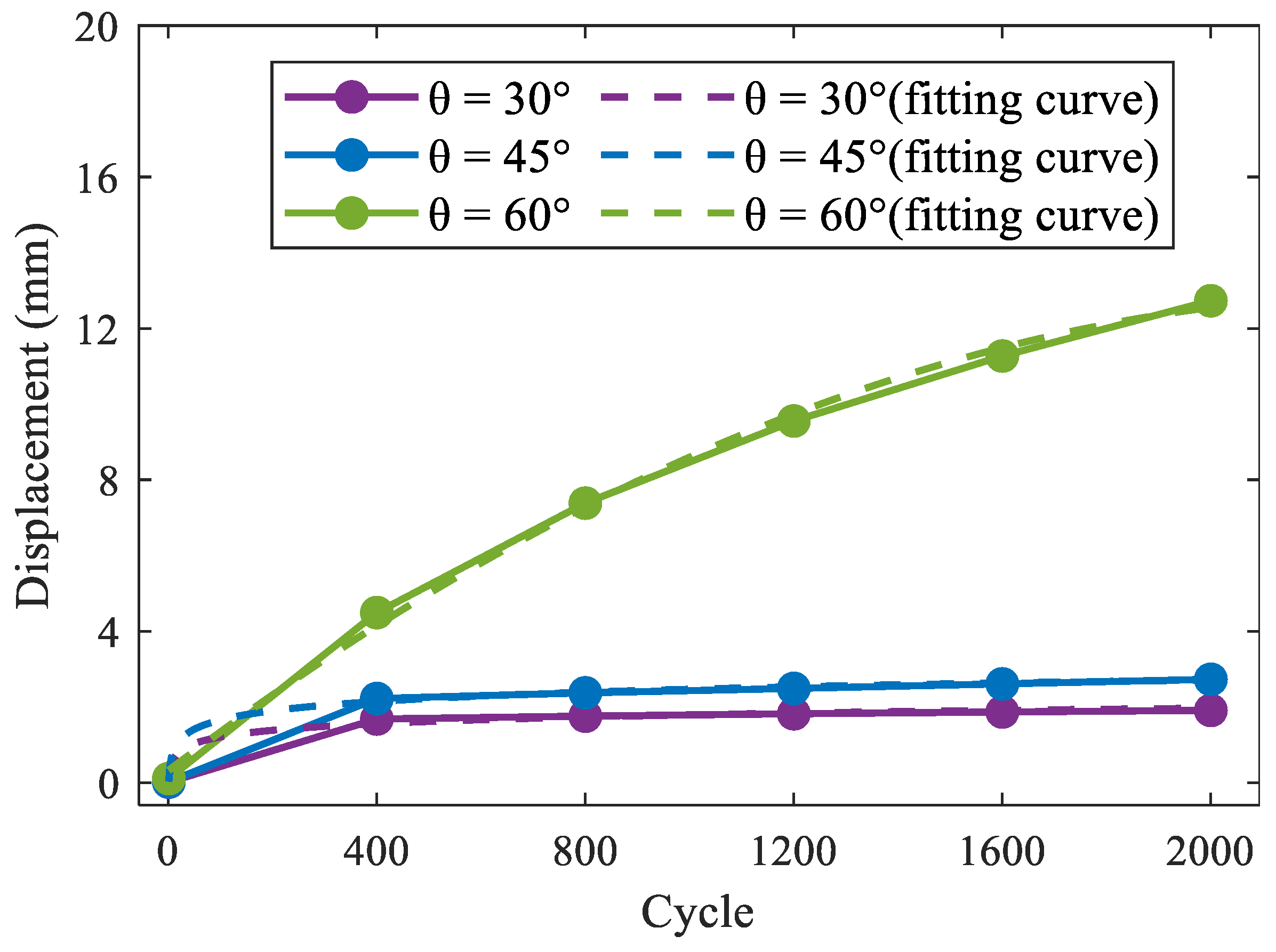
31] considered that the relationship between the number of loads and the cumulative displacement can determine whether the anchor pile is in a stable state: the curve in the stable state should satisfy the logarithmic function relationship, and the curve in the unstable state should satisfy the power function relationship. Combine the lateral cumulative displacement and the vertical cumulative displacement into the total cumulative displacement, and draw a load-total cumulative displacement relationship curve (
Figure 10). It can be seen from the figure that the cumulative displacements of the first 400 cycles of the three sets of test conditions were 1.68, 2.22, and 4.49 mm, accounting for 88%, 81%, and 35% of the overall cumulative displacement. This shows that the cumulative displacements of θ = 30° and θ = 45° were mainly generated in the first 400 cycles, and then the cumulative displacement development gradually stabilized. When θ = 60°, the accumulated displacement was mainly generated in the last 1600 cycles and will continue to increase.
Table 5 shows the fitting functions of the cumulative displacement for variable initial tension angles. The fitting functions of θ = 30° and θ = 45° were closer to the logarithmic function, and the fitting functions of θ = 60° were closer to the quadratic polynomial. The growth rate of this function is obviously greater than that of the logarithmic function and less than that of the power function, so it can be considered a metastable state.
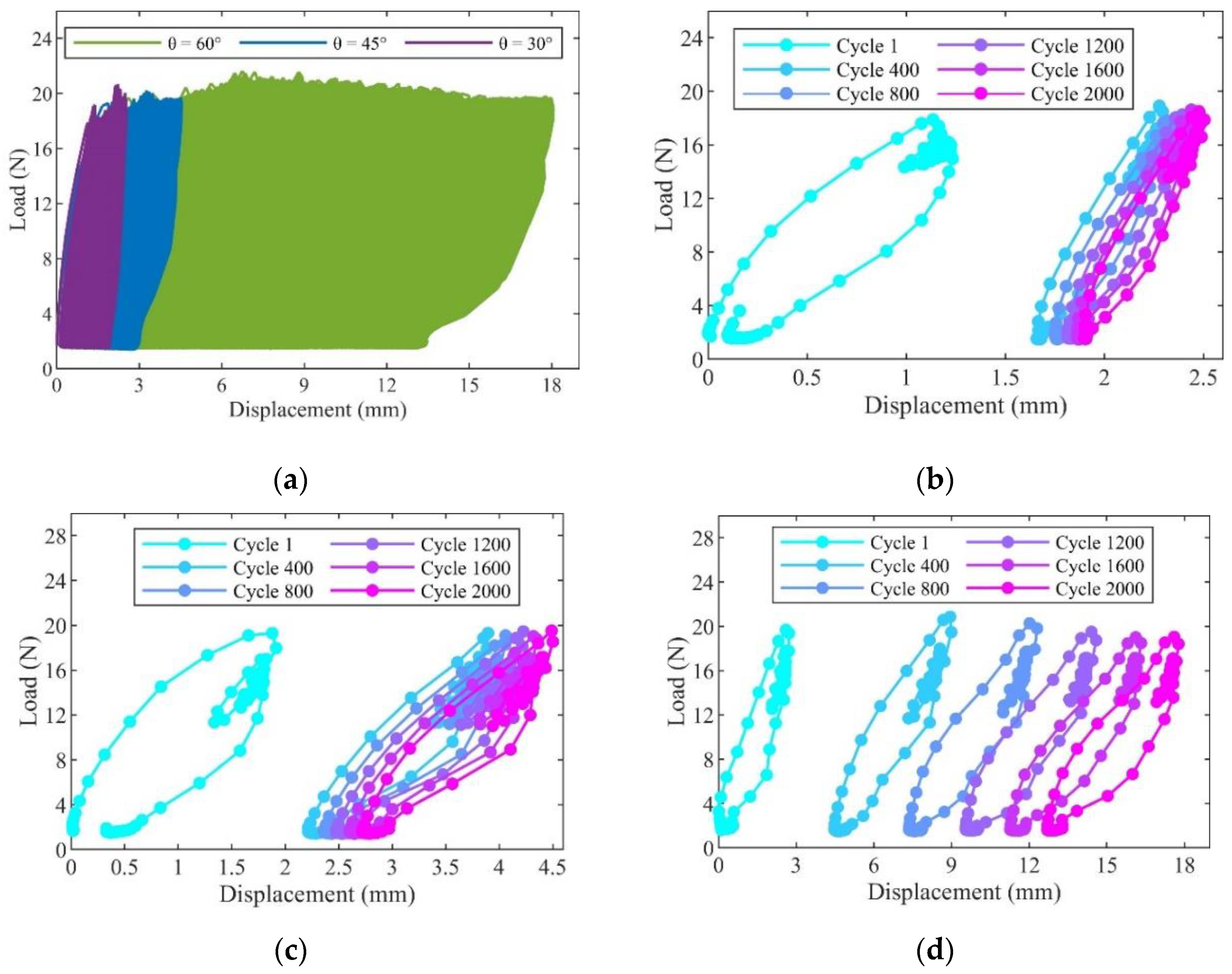
The load–displacement hysteresis curves of the three groups of initial tension angles have been depicted in
Figure 11a. It can be seen from the figure that the curve area with θ = 60° was the largest, and the area with θ = 30° was the smallest. In order to facilitate the analysis, the hysteresis curves of N = 1, 400, 800, 1200, 1600, and 2000 under each group of test conditions were drawn, and the change law of the movement mode of the anchor piles during the experiment was investigated.
The hysteresis curve at θ = 30° was shown in
Figure 11b and accurately reflected the movement mode of the anchor piles [
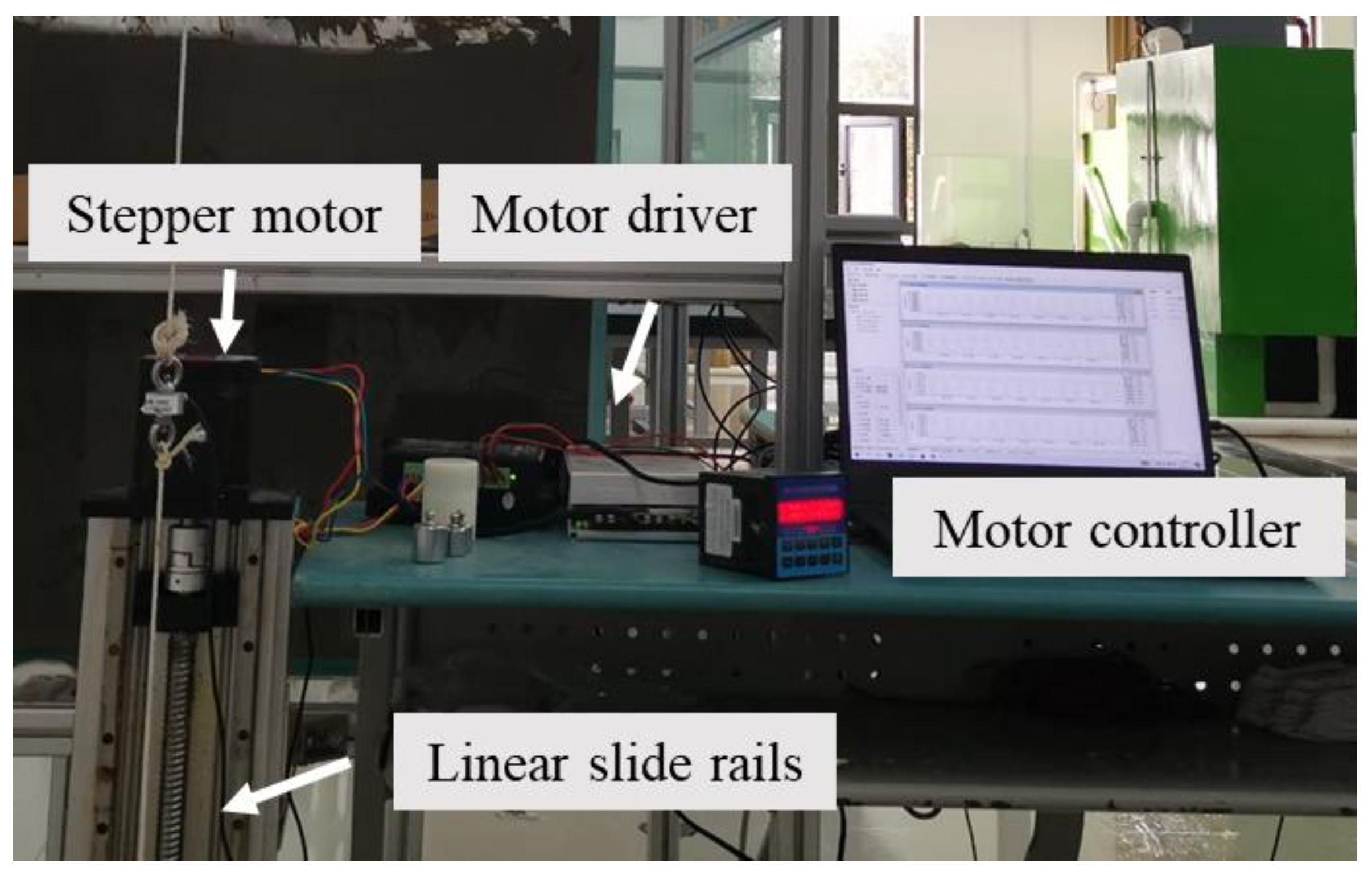
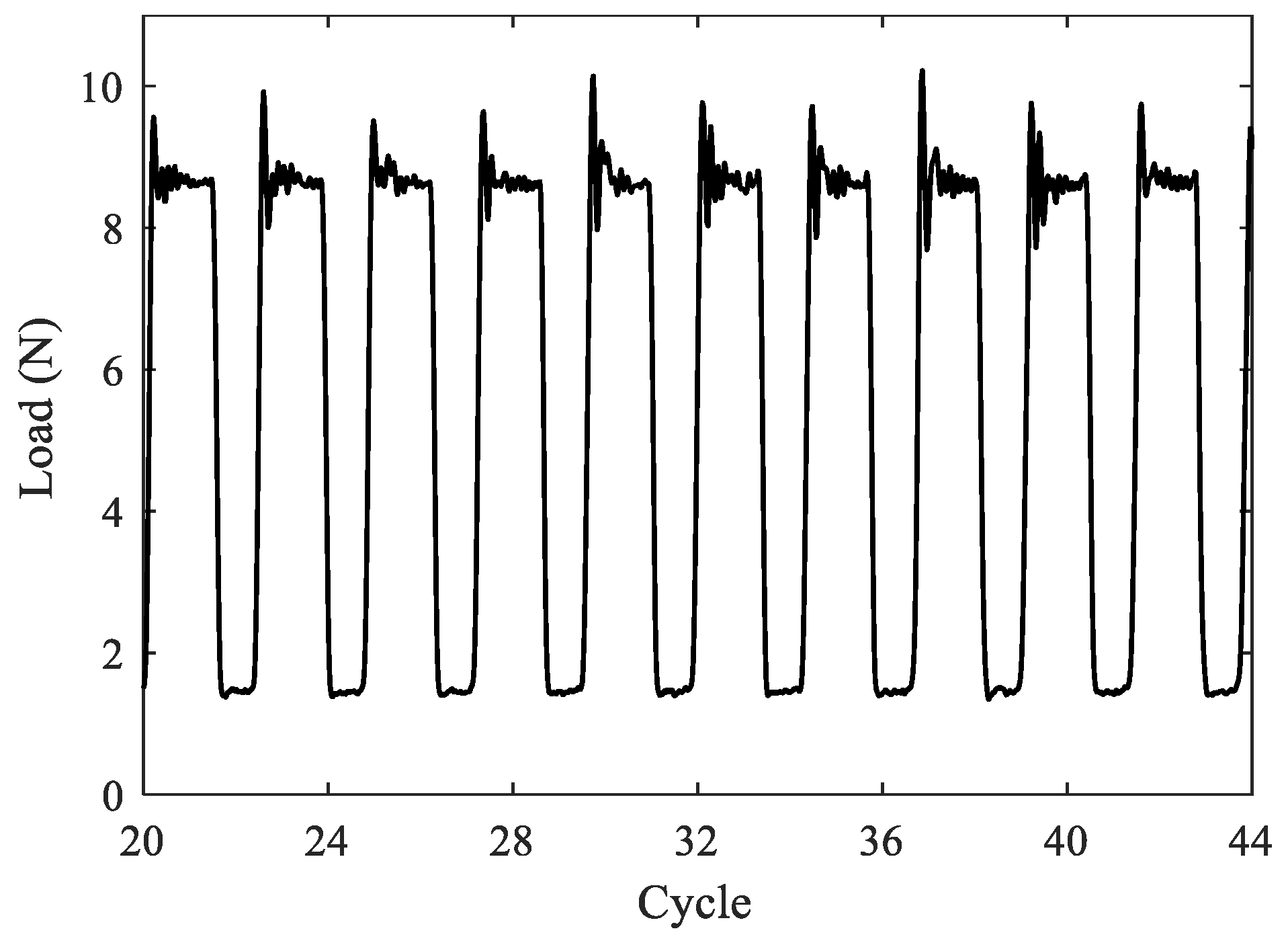
32]. The hysteresis curve of each cycle consists of two parts: loading and unloading. Generally, the load curve is convex during the loading stage, and the hysteresis curve of the clay is concave during unloading. After the load of the loading stage in the figure reaches the maximum value, multiple data points shift or even rebound, which is caused by the output load of the loading device (
Figure 5). As can be obviously seen that the movement mode of the anchor piles was the most special when N = 1. The loading stage is a smooth convex curve, and the unloading stage is a smooth concave curve. At this time, the area of the hysteresis loop was the largest, and the first loading produced a large cumulative displacement. This phenomenon has appeared in many experiments [
33]. The movement modes of the anchor piles for the rest of the cycles were similar; the loading and unloading stage had smooth curves, the slope of the curve was significantly higher than that when N = 1, and the area of the hysteresis loop was basically the same.
Figure 11c shows the displacement–load hysteresis curve under the cyclic load at θ = 45°. It can be seen from the figure that the movement characteristics of the anchor piles were special when N = 1, and the curve of the unloading stage showed a rebound phenomenon and the area enclosed by the hysteresis loop was the largest. For the rest of the cycle times, the movement of the anchor piles was similar, and the area of the hysteresis loop was similar.
Figure 11d is the displacement–load hysteresis curve under the cyclic load at θ = 60°. It can be seen from the figure that, unlike the other two groups of tension angles, the hysteresis loop area of the hysteresis curve when N = 1 was the smallest. As the number of cycles increased, the slope of the loading end curve gradually decreased. This shows that the soil stiffness gradually decreased, and the bearing capacity of the clay will decrease accordingly [
30]. After continuing to load for a period of time, the clay will be damaged. At this time, the model anchor pile is in a metastable state.
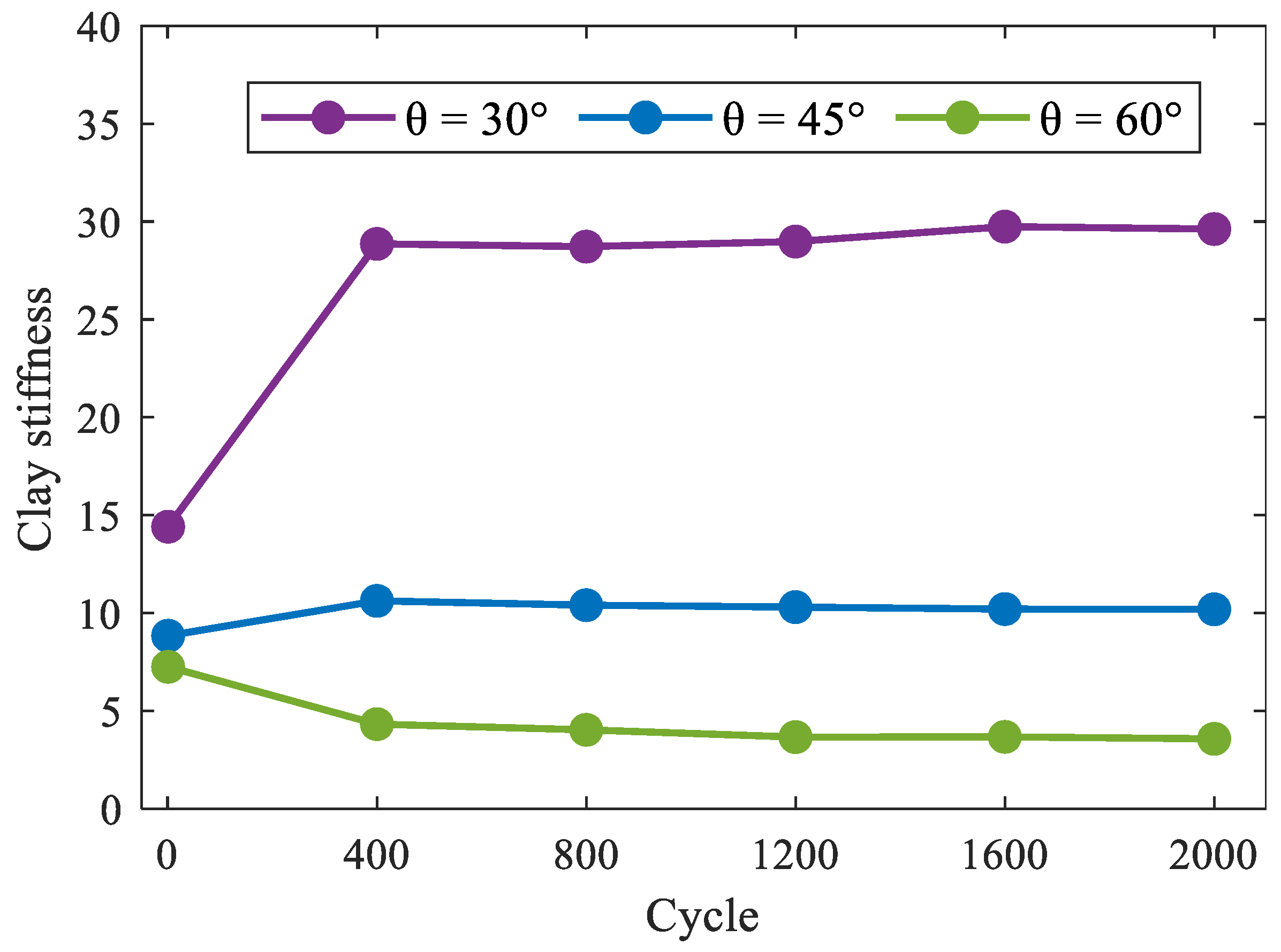
The degradation of soil stiffness under variable initial tension angles have been shown in
Figure 12 and the soil stiffness gradually decreased with the increase in the tension angle. When N = 400, the soil stiffness of θ = 30° was 2.71 times and 6.67 times that of θ = 45° and θ = 60°, respectively. With the increase in the number of cycles, the soil stiffness at θ = 30° increased gradually, and the increase in the soil stiffness was the largest in the first 400 cycles. The soil stiffness in the case of θ = 45° first increased and then decreased, and the variation range of the stiffness during loading was smaller than that in the case of θ = 30°. The soil stiffness at θ = 60° gradually decreased, and the decrease was the largest in the first 400 cycles.
After 2000 cycles, the anchor piles under three groups of different tension angles were not pulled out. Through the analysis of angles such as lateral and vertical displacement change, cumulative displacement change trend, hysteresis curve and stiffness degradation of anchor piles, it can be concluded that the θ = 30° and θ = 45° were stable states, and the θ = 60° was a metastable state.
3.4. The Effect of the Oblique Loading Amplitude
Three groups of load amplitude of
= 0.6, 0.8, and 1.0
with a uniform initial tension angle θ = 45° were set to explore the influence of the oblique load amplitude on the uplift resistance capacity.
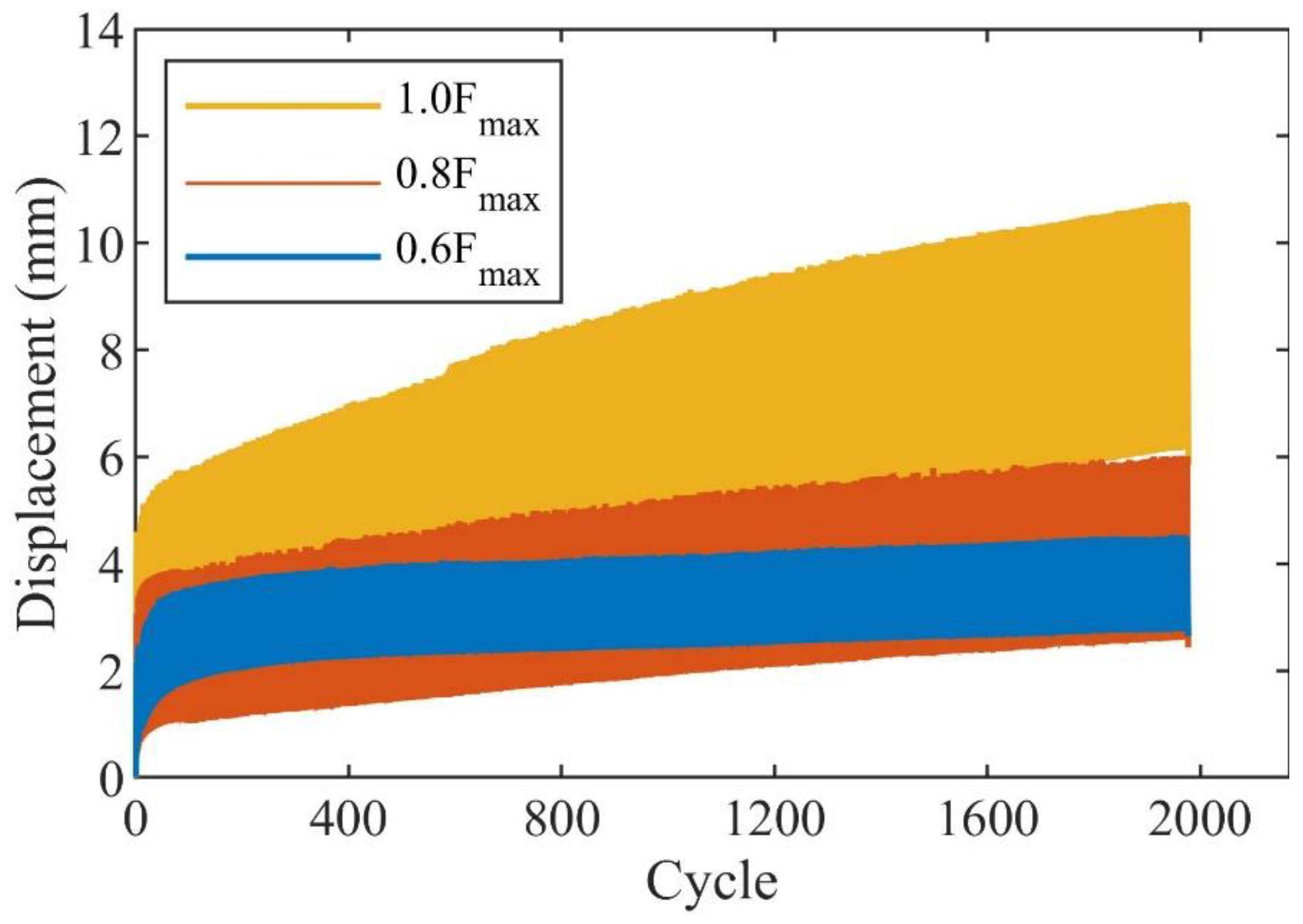
Figure 13 shows the time history of the total displacement with variable initial loading amplitudes under oblique cyclic loading. As shown in the figure, with the increase in the loading amplitude, the elastic displacement of the top of the anchor piles increased.
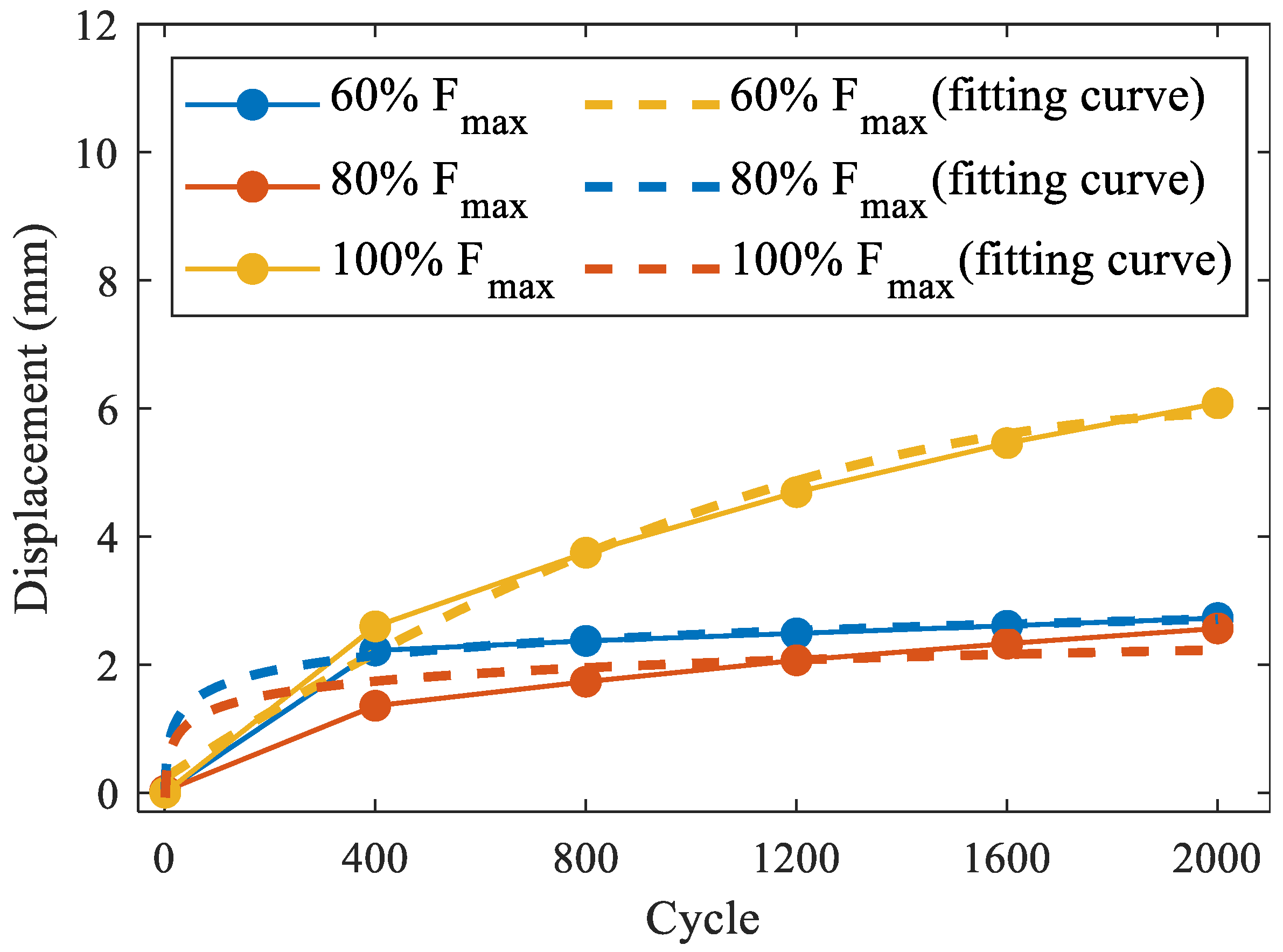
The relationship between the number of cycles and the cumulative displacement for variable cyclic loading amplitudes at θ = 45° is shown in
Figure 14. It can be seen from the figure that the accumulation of the first 400 cycles of the three groups of test conditions was 2.22 mm, 1.36 mm, and 2.597 mm, accounting for 81%, 53%, and 42% of the final cumulative displacement, respectively. This indicates that the cumulative displacements of
= 0.6, 0.8, and 1.0
were mainly generated in the first 400 cycles. With the increase in the loading amplitude, the proportion of the cumulative displacement generated in the first 400 cycles gradually decreased, and the cumulative displacement generated in the subsequent cycles gradually increased. The final cumulative displacement of
= 0.8
was less than
= 0.6
. According to the trend of cumulative displacement, if the loading continues, the final cumulative displacement of
= 0.8
will exceed
= 0.6
.
Table 6 shows the fitting functions of the cumulative displacements at variable loading amplitudes. The fitting functions of
= 0.6
and
= 0.8
were closer to the logarithmic function and were in a relatively stable state. The
= 1.0
fitting function was closer to a quadratic polynomial and was in a metastable state.
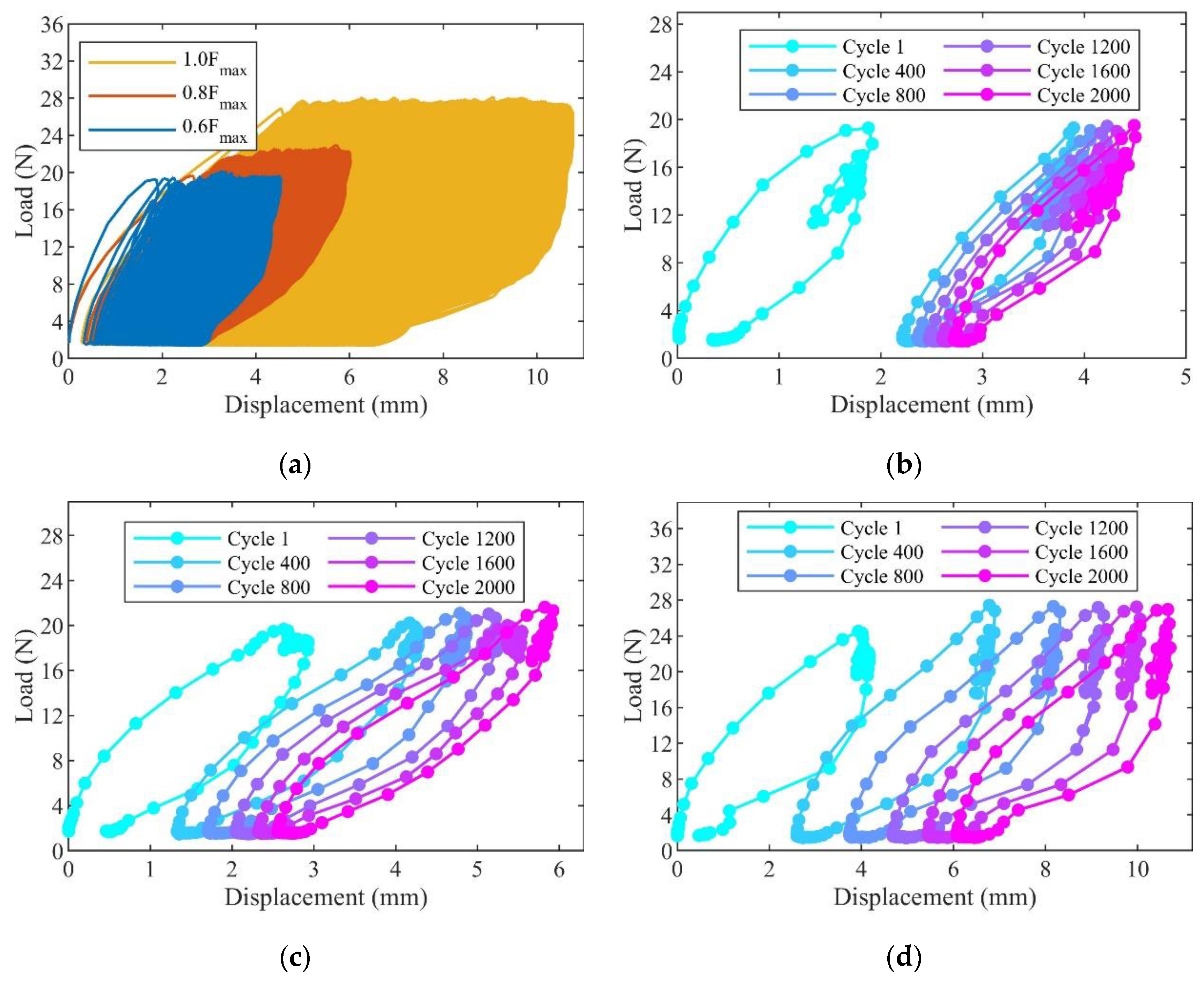
The load–displacement hysteresis curves under variable oblique loading amplitudes at θ = 45° is displayed in
Figure 15a. It can be obviously seen that the
= 1.0
test condition had the largest curve area, and the
= 0.6
test condition had the smallest curve area.
Figure 15b is the displacement-load hysteresis curve under the cyclic load for
= 0.6
, which has been described in detail above.
Figure 15c is the displacement-load hysteresis curve under the cyclic load for
= 0.8
. It can be seen from the figure that the movement modes of the anchor piles under variable cycle times are basically the same, and the curves of the loading stage and the unloading stage are smooth. When N = 1, the area of the lag loop was slightly larger than the number of other cycles.
Figure 15d shows the displacement–load hysteresis curve under cyclic loading for
= 1.0
. It can be seen from the figure that when N = 1, the curve of the unloading stage had an obvious turning point, and the area of the hysteresis loop was the largest at this time. For the rest of the cycles, the movement patterns of the anchor piles were similar, and the curve of the loading end was convex at first and then concave, but the area of the hysteresis loop was basically the same.
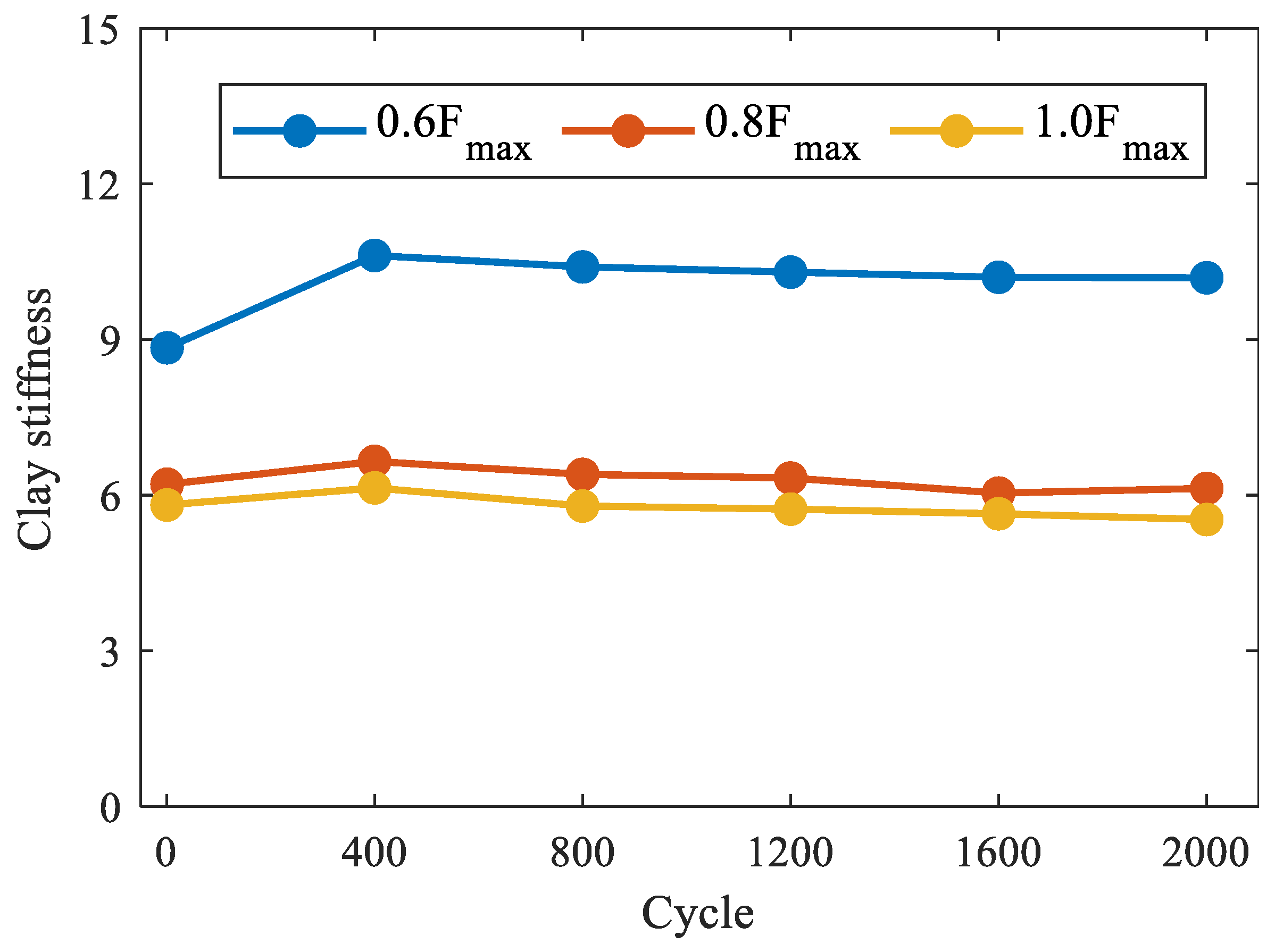
Figure 16 depicted the degradation of soil stiffness under variable loading amplitude angles of θ = 45°. It can be seen from the figure that the soil stiffness of
= 0.6
is significantly greater than that of
= 0.8
and 1.0
. As the loading amplitude increased, the soil stiffness gradually decreased. In addition, with the increase in the number of cycles
= 0.6
, the soil stiffness first increased and then decreased. The stiffness increased for the first 400 cycles and gradually decreased for the last 1600 cycles. When
= 0.8
and 1.0
, the soil stiffness changes were almost the same; they both increased first and then decreased, and the overall change range was small.
After 2000 cycles, the anchor piles of the three groups of different loading amplitudes were not pulled out. Through the analysis of the elastic displacement change, cumulative displacement change trend, hysteresis curve, and stiffness degradation of anchor piles, it can be considered that = 0.6 and 0.8 is a stable state, and = 1.0 is a metastable state.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}