
Research on Optimization Design of Fully Parameterized Pump-Jet Propulsion


Abstract
:1. Introduction
2. Hydrodynamic Performance Optimization Design Methodology of Pump-Jet Propulsion System
2.1. Establishment of a Fully Parameterized Pump-Jet Propulsion System Model
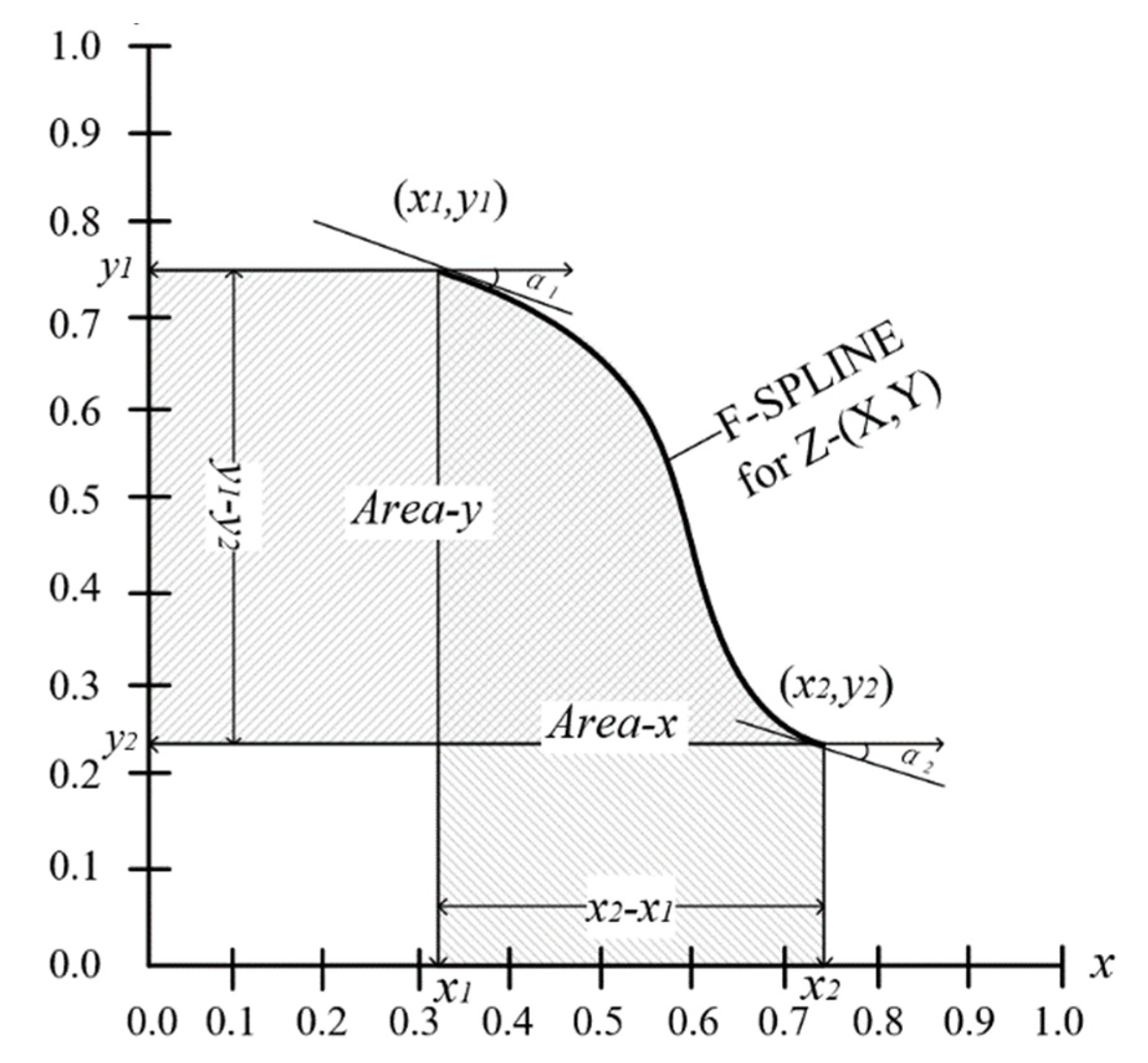
2.1.1. F-Spline Curve
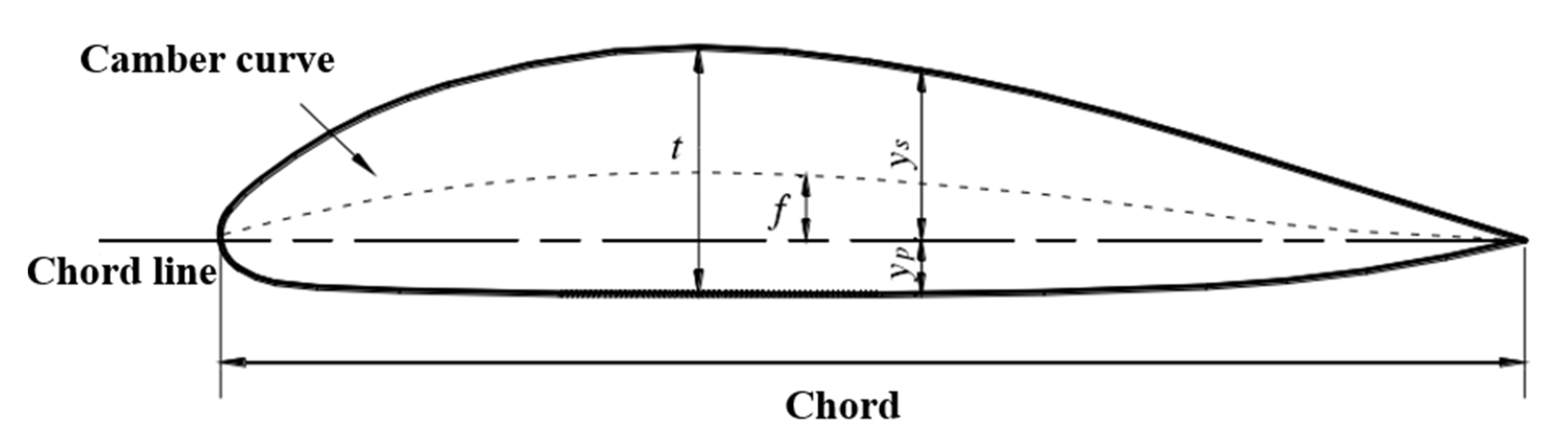
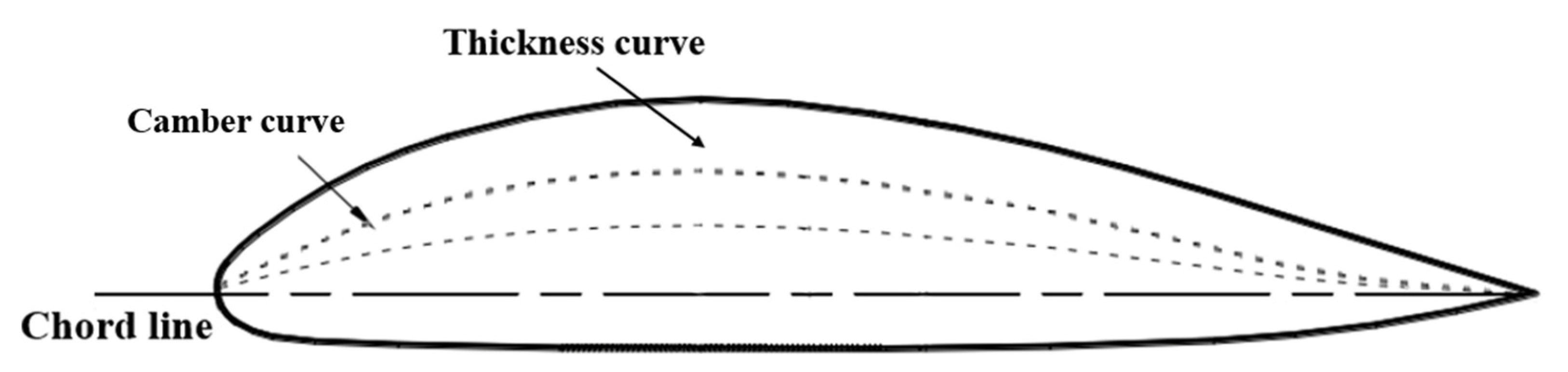
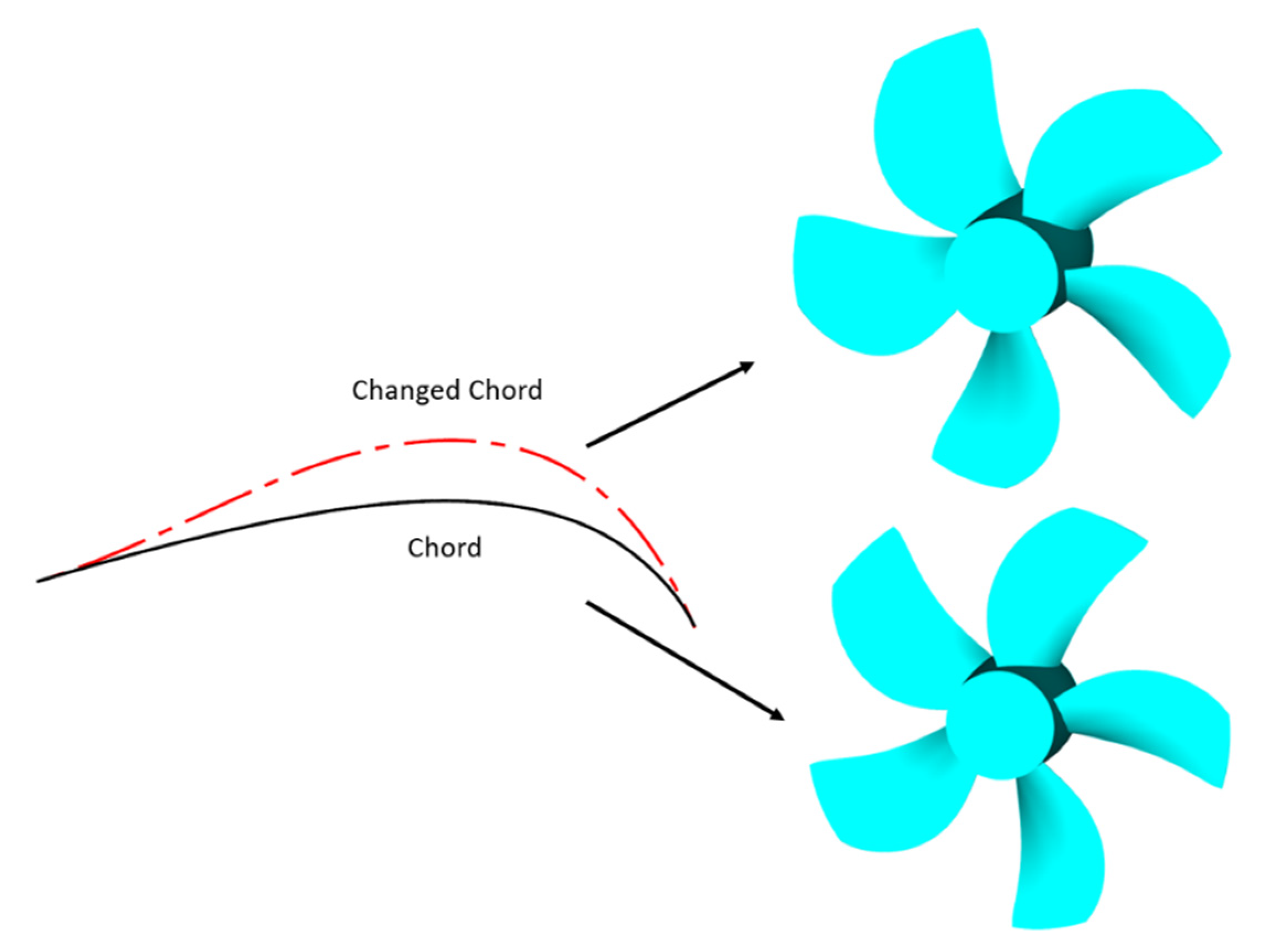
2.1.2. Modeling of the Rotor Airfoil Section of a Pump-Jet Propulsion System
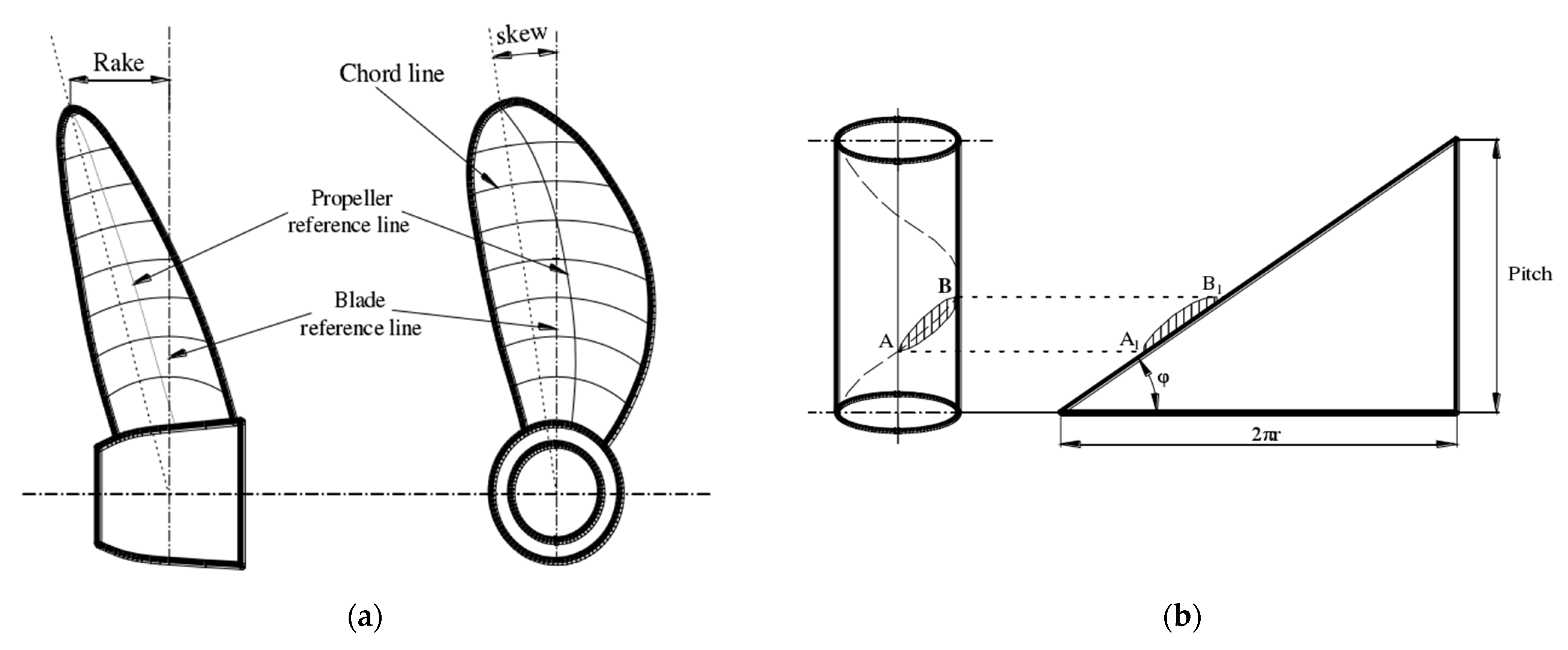
2.1.3. Parametric Modeling of Pump-Jet Propulsion System Rotor
2.2. Numerical Simulation
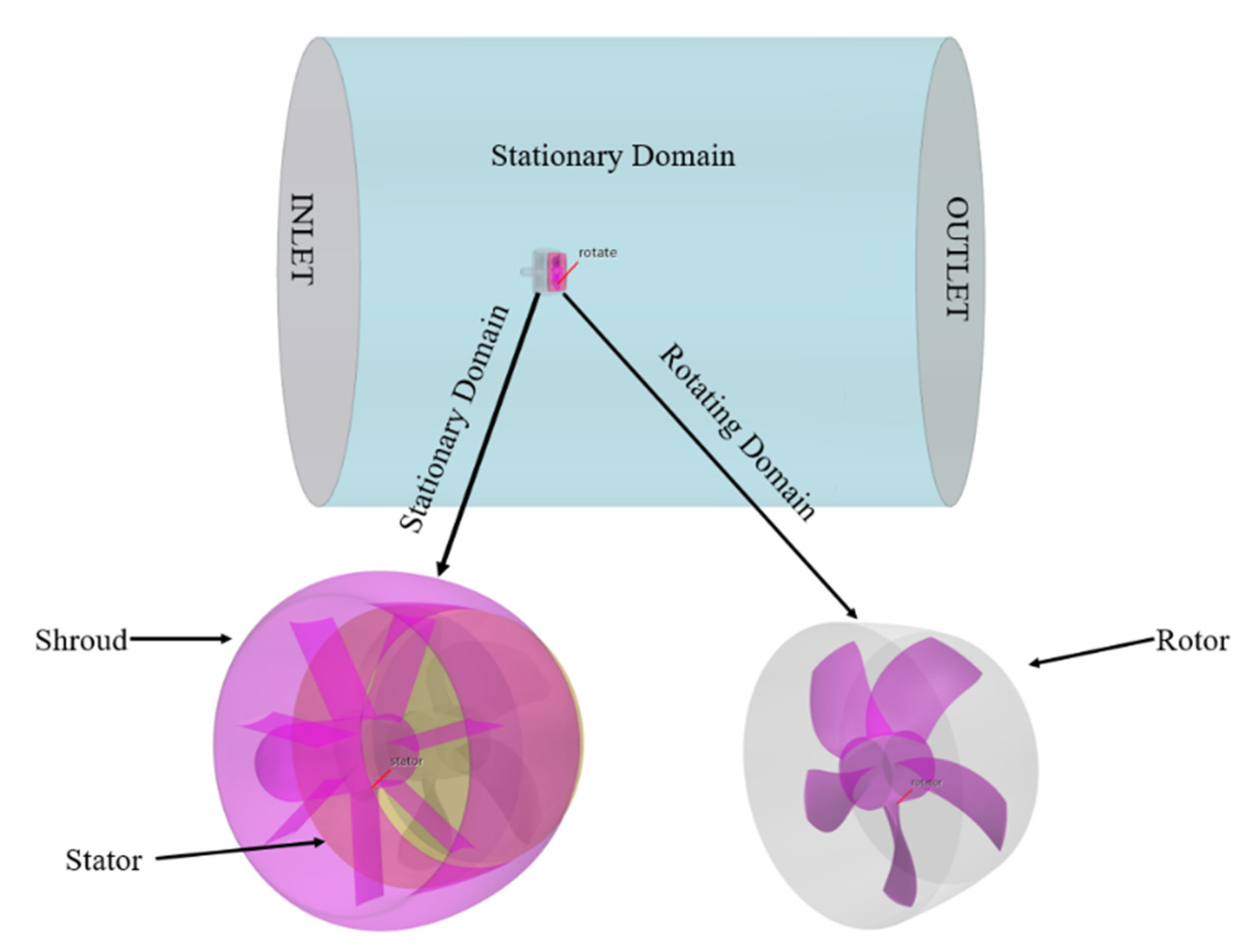
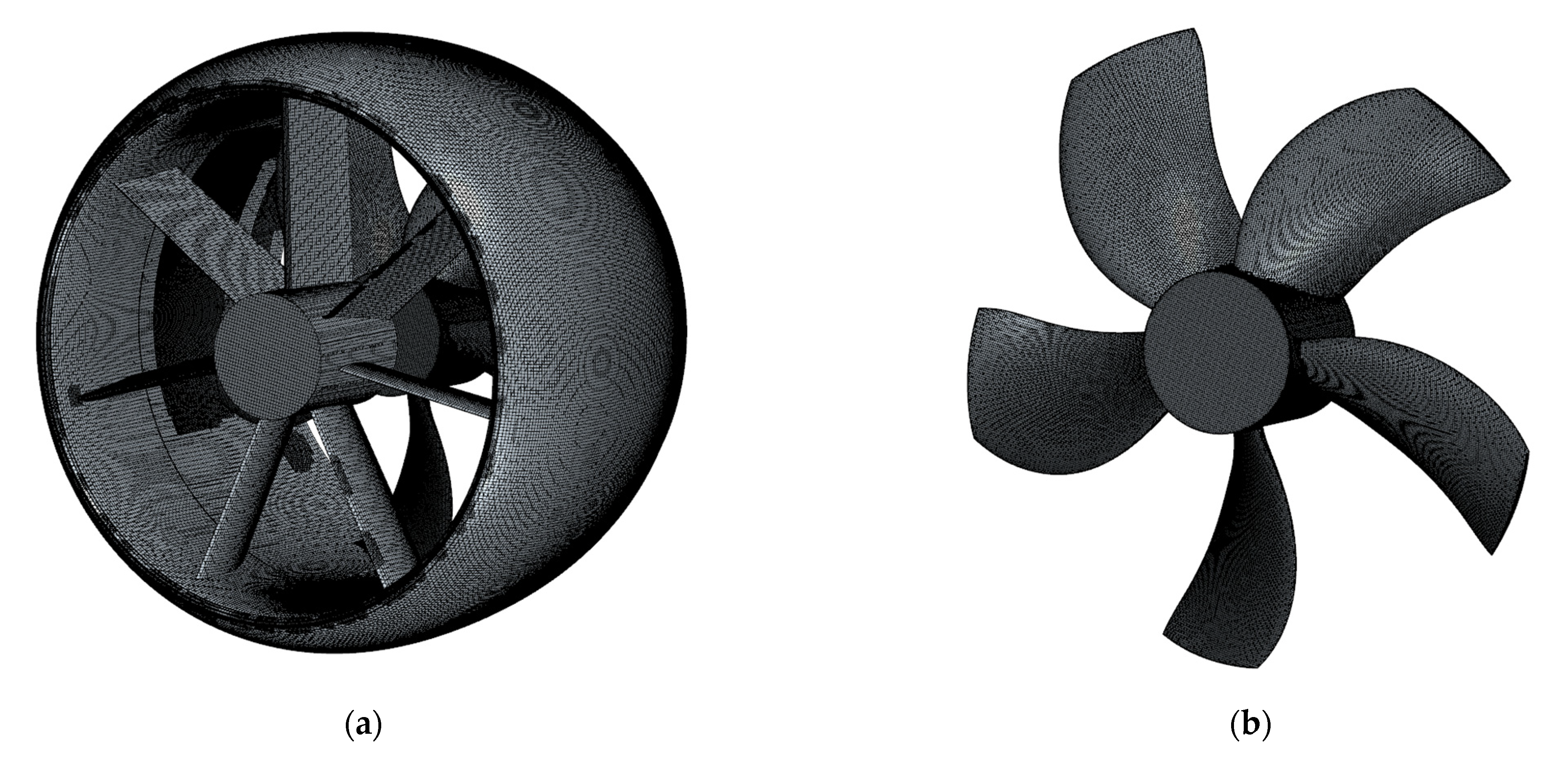
2.2.1. Numerical Calculation Method
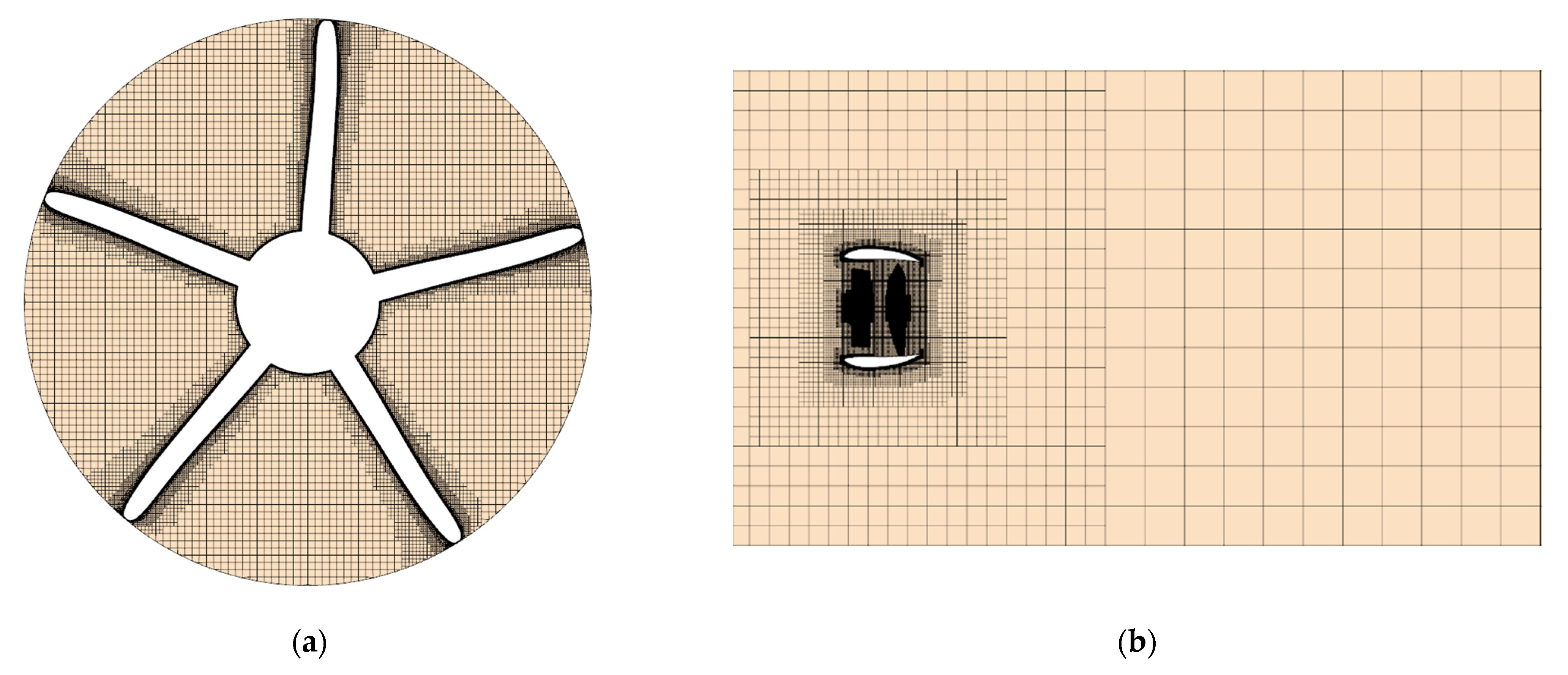
2.2.2. Grid Independence Analysis
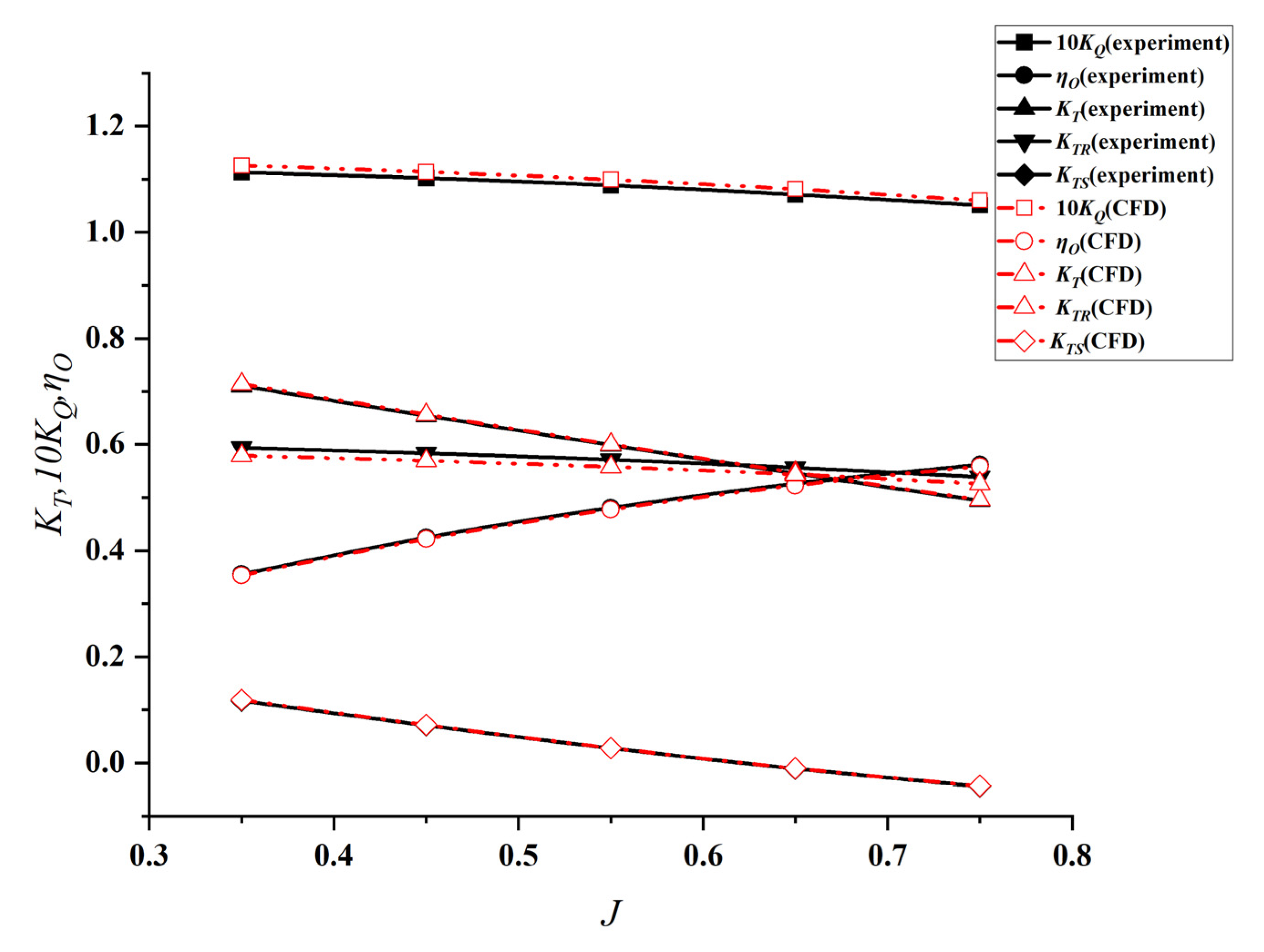
2.2.3. Numerical Verification
2.3. Multi-Objective Optimization Design of Pump-Jet Propulsion System
2.3.1. Definition of Multi-Objective Optimization Problem
2.3.2. Optimization Algorithm
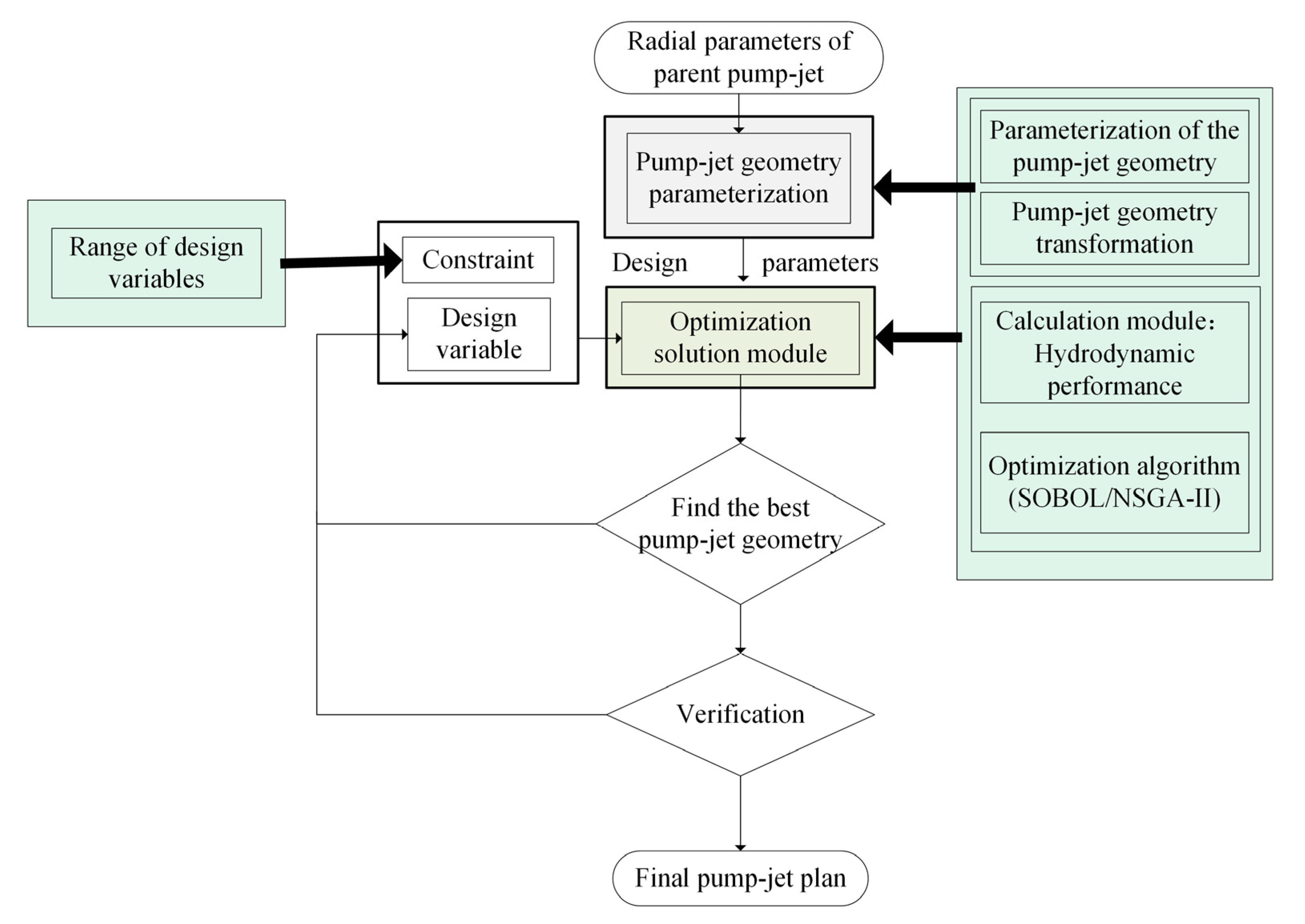
2.3.3. Optimization Design Procedure
3. Result and Analysis
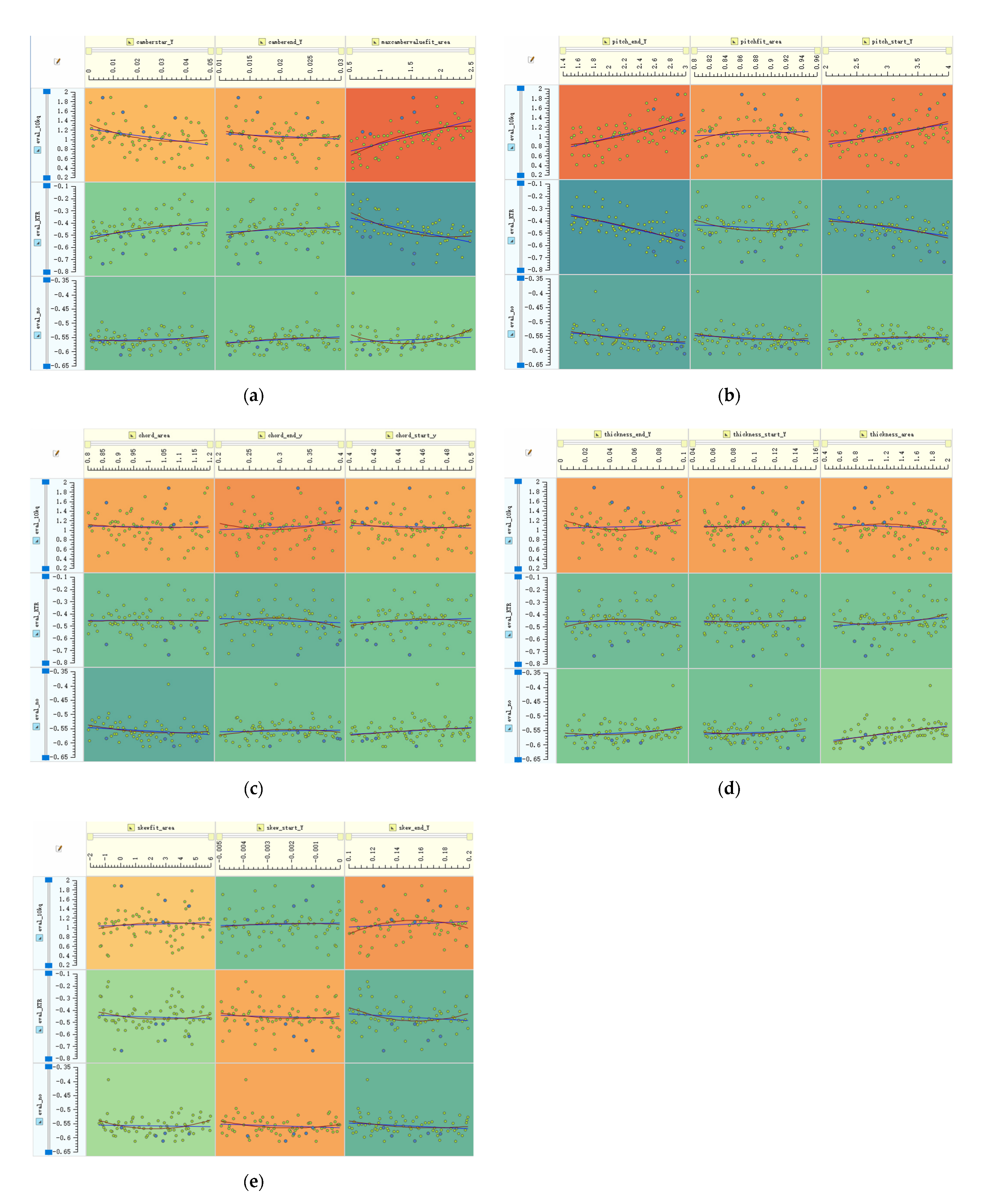
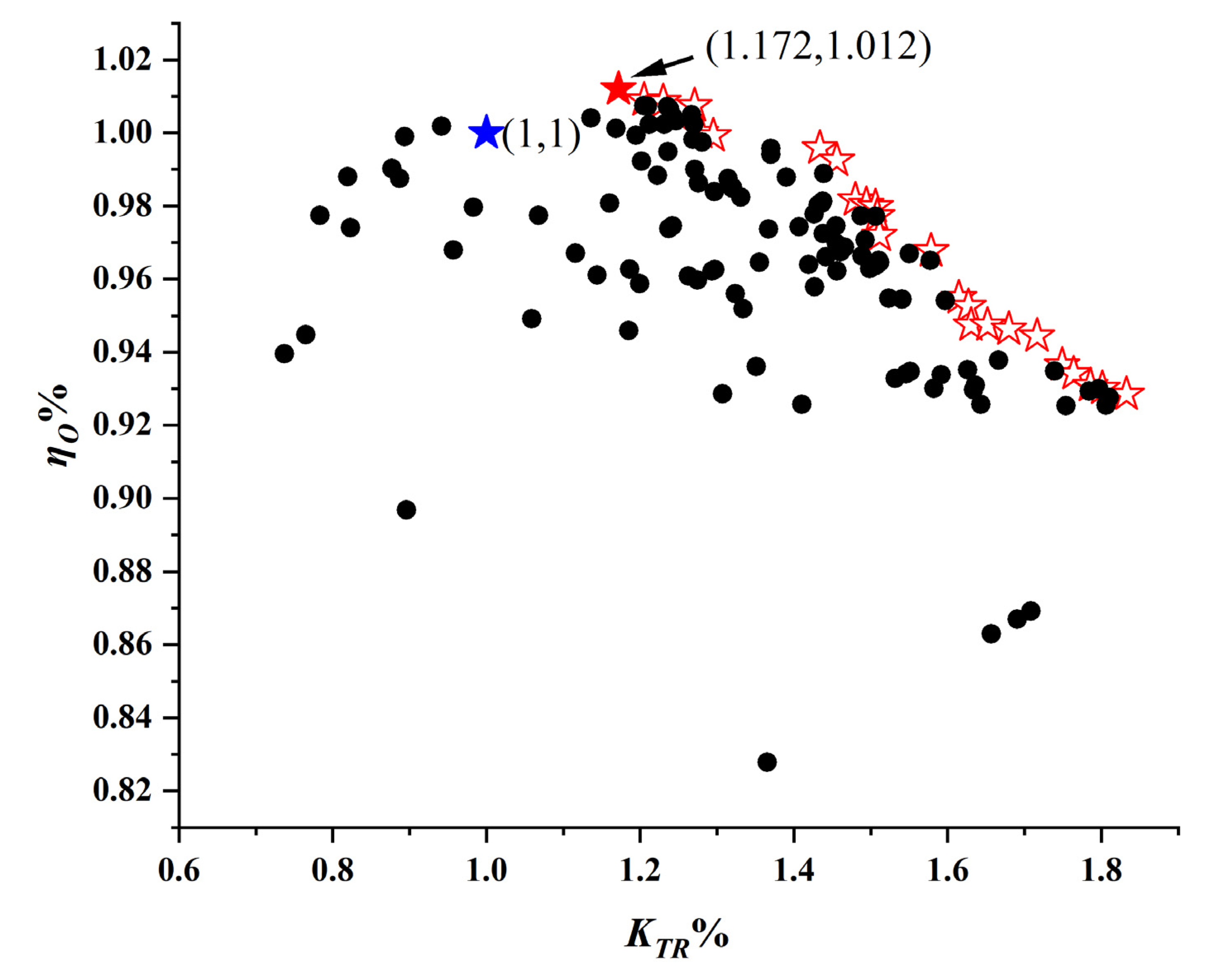
3.1. Sensitivity Analysis and the Selection of Optimal Solution
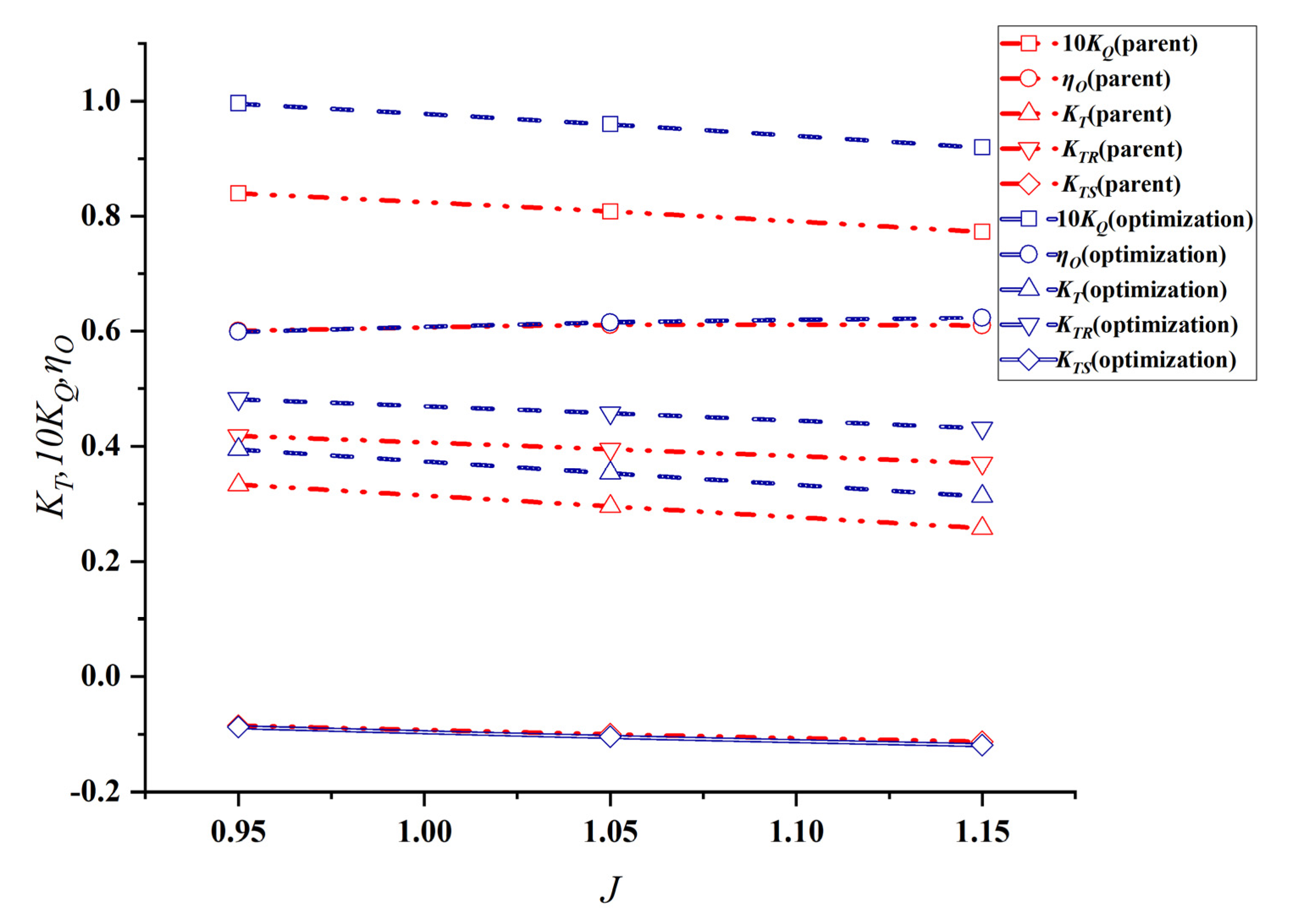
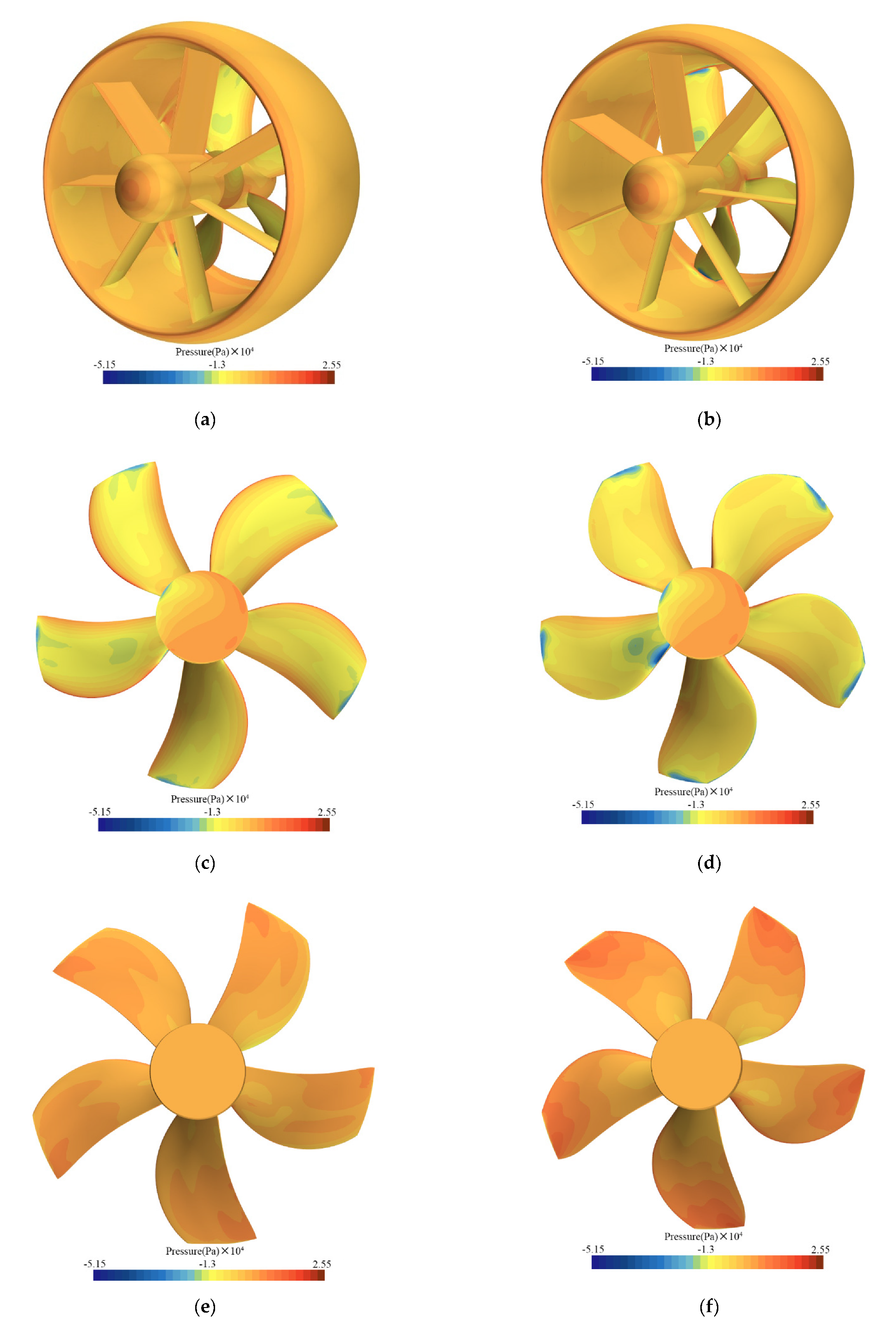
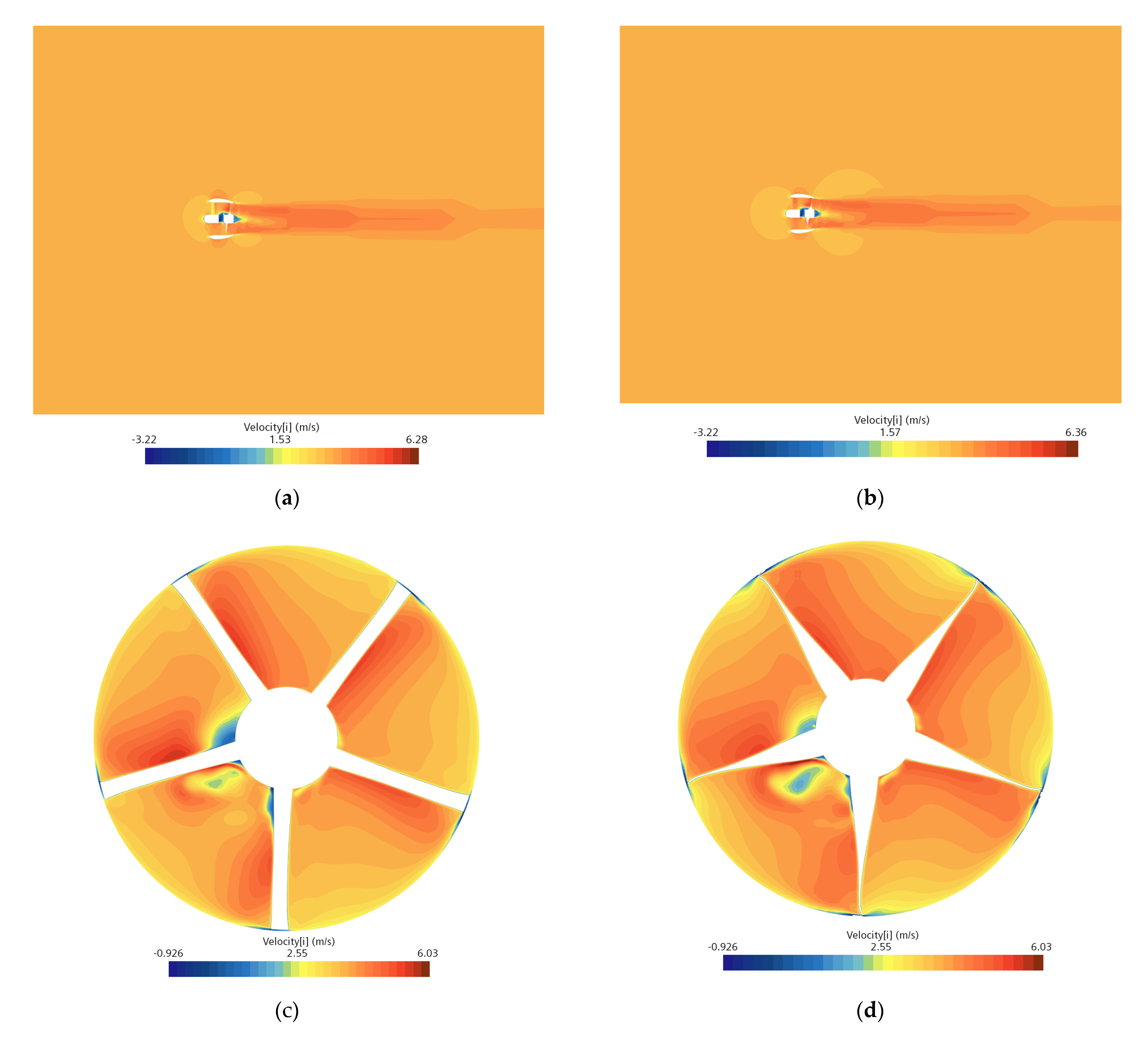
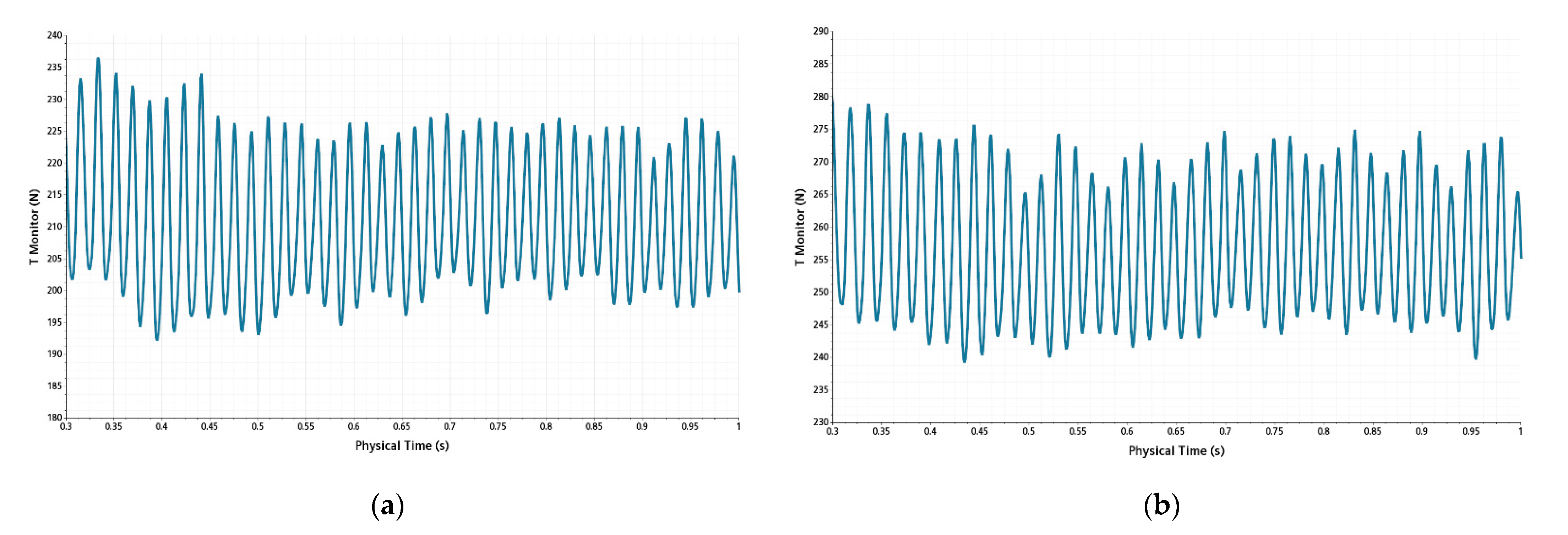
3.2. Performance Comparison of Pump-Jet Propulsion System
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hughes, M.J.; Kinnas, S.A. An analysis method for a ducted propeller with pre-swirl stator blades. In Proceedings of the SNAME 6th Propeller and Shafting Symposium, Virginia Beach, VA, USA, 17 September 1991. [Google Scholar]
- Kinnas, S.; Hsin, C.; Keenan, D. A potential based panel method for the unsteady flow around open and ducted propellers. In Proceedings of the Naval Hydrodynamics, 18th Symposium, Ann Arbor, MI, USA, 19–24 August 1990; National Academy Press: Washington, DC, USA, 1991; p. 667. [Google Scholar]
- Kawakita, C.; Hoshino, T. Hydrodynamic analysis of a ducted propeller with stator in steady flow using a surface panel method. Trans. West Jpn. Soc. Nav. Archit. 1998, 96, 17–30. [Google Scholar]
- Park, W.-G.; Jang, J.-H. Numerical simulation of flow field of ducted marine propeller with guide vane. In Proceedings of the Fourth International Conference on Pumps and Fans, Beijing, China, 26–29 August 2002; p. 307. [Google Scholar]
- Park, W.-G.; Jang, J.H.; Chun, H.H.; Kim, M.C.J.O.E. Numerical flow and performance analysis of waterjet propulsion system. Ocean Eng. 2005, 32, 1740–1761. [Google Scholar] [CrossRef]
- Suryanarayana, C. Advanced propulsors for high speed marine vehicles. In Technological Challenges Developments Pursued at Naval Science Technological Laboratory; Naval Science & Technological Laboratory (INDIA): New Delhi, India, 2004. [Google Scholar]
- Suryanarayana, C.; Satyanarayana, B.; Ramji, K.; Rao, M.N. Cavitation studies on axi-symmetric underwater body with pumpjet propulsor in cavitation tunnel. International Journal of Naval Architecture Ocean Engineering 2010, 2, 185–194. [Google Scholar] [CrossRef] [Green Version]
- Suryanarayana, C.; Satyanarayana, B.; Ramji, K.; Saiju, A. Experimental evaluation of pumpjet propulsor for an axisymmetric body in wind tunnel. Int. J. Nav. Archit. Ocean Eng. 2010, 2, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Suryanarayana, C. Innovative CAM techniques for propeller manufacture. In Proceedings of the 3rd International Conference on Navy and Ship Building Nowadays (NSN2003), St Petursburg, Russia, 26–28 June 2003. [Google Scholar]
- Suryanarayana, C.; Satyanarayana, B.; Ramji, K. Performance evaluation of an underwater body and pumpjet by model testing in cavitation tunnel. Int. J. Nav. Archit. Ocean Eng. 2010, 2, 57–67. [Google Scholar] [CrossRef] [Green Version]
- Suryanarayana, C.; Reddy, K.P.; Mathi, S.; Swamy, P.V.; Suresh, R.V. Hydrodynamic design of propulsor, profile and hovering system for an expendable decoy. In Proceedings of the International Conference in Marine Hydrodynamics 2006, Shanghai, China, 11–14 July 2006. [Google Scholar]
- Das, H.; Jayakumar, P.; Saji, V.; Yerram, R. CFD examination of interaction of flow on high-speed submerged body with pumpjet propulsor. In Proceedings of the 5th International Conference on High-performance Marine Vehicles, Launceston, Australia, 8–10 November 2006; pp. 466–479. [Google Scholar]
- Ahn, S.J.; Kwon, O.J. Numerical investigation of a pump-jet with ring rotor using an unstructured mesh technique. J. Mech. Sci. Technol. 2015, 29, 2897–2904. [Google Scholar] [CrossRef]
- Ahn, S.J.; Kwon, O.J. Numerical investigation of cavitating flows for marine propulsors using an unstructured mesh technique. Int. J. Heat Fluid Flow 2013, 43, 259–267. [Google Scholar] [CrossRef]
- Ivanell, S.J. Hydrodynamic simulation of a torpedo with pumpjet propulsion system. Stockh. R. Inst. Technol. 2001. [Google Scholar]
- Yamada, K.; Kusano, K.; Furukawa, M. Large-scale numerical simulation of unsteady flow field in a half-ducted propeller fan using lattice Boltzmann method. In Proceedings of the Fluids Engineering Division Summer Meeting, Seoul, Korea, 26–31 July 2015; p. V01AT09A016. [Google Scholar]
- Baltazar, J.; Falcão de Campos, J.; Bosschers, J. Open-water thrust and torque predictions of a ducted propeller system with a panel method. Int. J. Rotating Mach. 2012, 2012, 474785. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Song, B.; Huang, Q.G.; Hu, H.B. Hydrodynamic performance simulation method of pump-jet propulsion based on CFD technology. J. Northwestern Polytech. Univ. 2010, 724–729. (In Chinese) [Google Scholar] [CrossRef]
- Guang, P.; Lin, L. Numerical simulation of steady hydrodynamic performance for integrated motor propulsor on CFD. In Proceedings of the 2013 International Conference on Virtual Reality and Visualization, Shaanxi, China, 14–15 September 2013; pp. 15–20. [Google Scholar]
- Pan, G.; Hu, B.; Wang, P.; Yang, Z.D.; Wang, Y.Y. Numerical simulation of steady hydrodynamic performance of pump-jet propulsion. J. Shanghai Jiaotong Univ. 2013, 47, 932–937. (In Chinese) [Google Scholar] [CrossRef]
- Hu, Y.L.; Liu, W.F. The Inside Flow Field Simulation of Pump-jet Propulsor Based on The Software FLUENT. Mach. Electron. 2009, 27–30. (In Chinese) [Google Scholar] [CrossRef]
- Liu, W.F.; Hu, Y.L. Structural principle and characteristic analysis of pump-jet propulsion of a new underwater integrated motor propulsion unit. Torpedo Technol. 2007, 15, 5–8. (In Chinese) [Google Scholar]
- Ni, Y.Y.; Wu, T.T. Analysis and design improvement of pump water jet propulsion. Ship Sea Eng. 2012, 41, 61–63, 67. (In Chinese) [Google Scholar]
- Ni, Y.Y.; Liu, W.M. Research progress of pump water jet propulsion. Ship Sea Eng. 2013, 42, 1–5. (In Chinese) [Google Scholar]
- Gaafary, M.; El-Kilani, H.; Moustafa, M.J.A.E.J. Optimum design of B-series marine propellers. Alex. Eng. J. 2011, 50, 13–18. [Google Scholar] [CrossRef] [Green Version]
- Xie, G.J.P.E. Optimal preliminary propeller design based on multi-objective optimization approach. Procedia Eng. 2011, 16, 278–283. [Google Scholar] [CrossRef] [Green Version]
- Gaggero, S.; Gonzalez-Adalid, J.; Sobrino, M.P.J.A.O.R. Design of contracted and tip loaded propellers by using boundary element methods and optimization algorithms. Appl. Ocean Res. 2016, 55, 102–129. [Google Scholar] [CrossRef]
- Gaggero, S.; Villa, D.; Tani, G.; Viviani, M.; Bertetta, D.J.O.E. Design of ducted propeller nozzles through a RANSE-based optimization approach. Ocean Eng. 2017, 145, 444–463. [Google Scholar] [CrossRef]
- Mizzi, K.; Demirel, Y.K.; Banks, C.; Turan, O.; Kaklis, P.; Atlar, M.J.A.O.R. Design optimisation of Propeller Boss Cap Fins for enhanced propeller performance. Appl. Ocean Res. 2017, 62, 210–222. [Google Scholar] [CrossRef] [Green Version]
- Nouri, N.M.; Mohammadi, S.; Zarezadeh, M.J.O.E. Optimization of a marine contra-rotating propellers set. Ocean Eng. 2018, 167, 397–404. [Google Scholar] [CrossRef]
- Yang, L.C.; Yang, C.J.; Li, X.B. Research on Propeller Optimal Design Based on Multi-objective Evolutionary Algorithm and Decision Technology. China Shipbuild. 2019, 3, 55–66. (In Chinese) [Google Scholar]
- Han, Y.B.; Dong, Z.Q.; Lv, J.; Feng, J.; Zhou, W.X. Application of Optimization Theory in Propeller Hydrodynamic Design. China Shipbuild. 2019, 60, 52–59. (In Chinese) [Google Scholar]
- Mian, H.H.; Wang, G.; Zhou, H.; Wu, X.J.A.S. Technology. Optimization of thin electric propeller using physics-based surrogate model with space mapping. Aerosp. Sci. 2021, 111, 106563. [Google Scholar] [CrossRef]
- Lu, Y.; Gu, Z.H.; Liu, S.W.; Chuang, Z.J.; Li, Z.Y.; Li, C.Z. Research on optimal design of polar ship bow based on ice resistance. J. Ship Mech. 2021, 25, 1040–1048. (In Chinese) [Google Scholar]
- Long, W. Optimization of Propeller Cavitation Performance Based on New Profile Design. Master’s Thesis, China Ship Research Institute, Wuxi, China, 2011. (In Chinese). [Google Scholar]
- Zhang, X.Y. Multi-Objective Optimization Design Method of Propeller Based on Fluid-Structure Interaction. Master’s Thesis, Dalian University of Technology, Dalian, China, 2021. (In Chinese). [Google Scholar]
- Yu, H.; Zhang, Z.; Hua, H.J.O.E. Numerical investigation of tip clearance effects on propulsion performance and pressure fluctuation of a pump-jet propulsor. Ocean Eng. 2019, 192, 106500. [Google Scholar] [CrossRef]
- Liu, Y.J. Robust Optimization Design of McPherson Suspension Based on Kriging Model and NSGA-ii Algorithm. Master’s Thesis, East China Jiaotong University, Nanchang, China, 2016. (In Chinese). [Google Scholar]
- Ma, X.S.; Li, Y.L.; Yan, L. Comparison of traditional multi-objective optimization method and multi-objective genetic algorithm. Electr. Drive Autom. 2010, 32, 48–50, 53. (In Chinese) [Google Scholar]
- Feng, Z.W. Multi-Objective Evolutionary Algorithm and Its Application in Aircraft Dynamics System. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2014. (In Chinese). [Google Scholar]
- Saltelli, A.; Bolado, R. An alternative way to compute Fourier amplitude sensitivity test (FAST). Comput. Stat. Data Anal. 1998, 26, 445–460. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Shi, S.; Tang, W.; Huang, X.; Hua, H. Broadband force spectra of a pump-jet propulsor subjected to inflow turbulence: Comparison with ducted propeller and propeller. Ocean Eng. 2022, 251, 111087. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value |
|---|---|
| Rotor D | 294 mm |
| Number of Rotor | 5 |
| Stator chord | 60 mm |
| Number of Stator | 7 |
| Stators right-turn angle | 7.5 deg |
| Rotor and stator airfoils | Naca66Mod a = 0.8 |
| Shroud length | 230 mm |
| Shroud inlet Diameter | 316 mm |
| Shroud outlet Diameter | 284 mm |
| r/R | Chord (mm) | Pitch (mm) | Thickness (mm) |
|---|---|---|---|
| 0.25 | 64.22 | 403.25 | 12.78 |
| 0.35 | 68.426 | 401.9 | 11.26 |
| 0.4 | 70.373 | 402.93 | 10.46 |
| 0.5 | 73.802 | 405.92 | 8.79 |
| 0.6 | 76.43 | 406.87 | 7.22 |
| 0.7 | 77.74 | 401.31 | 5.89 |
| 0.8 | 76.78 | 383.81 | 4.91 |
| 0.9 | 71.85 | 347.34 | 4.3 |
| 0.95 | 66.38 | 316.93 | 4.13 |
| 0.975 | 62.44 | 298.15 | 4.08 |
| 1 | 56.67 | 276.09 | 4.04 |
| Number of Grids | 10KQ | Error | ηO | Error | KT | Error | KTR | Error | KTS | Error |
|---|---|---|---|---|---|---|---|---|---|---|
| EFD | 1.051 | 0.00% | 0.562 | 0.00% | 0.495 | 0.00% | 0.539 | 0.00% | −0.044 | 0.00% |
| 1.77 million | 1.061 | −0.91% | 0.559 | 0.56% | 0.496 | −0.35% | 0.526 | 2.29% | −0.043 | 1.56% |
| 2.67 million | 1.059 | −0.79% | 0.558 | 0.63% | 0.495 | −0.15% | 0.524 | 2.71% | −0.042 | 4.60% |
| 3.70 million | 1.067 | −1.52% | 0.560 | 0.33% | 0.501 | −1.18% | 0.528 | 2.08% | −0.041 | 6.73% |
| Parameter | Numerical Value |
|---|---|
| Material | Nickel Aluminum Bronze |
| Elastic Modulus | 117 Gpa |
| Poisson’s ratio | 0.34 |
| Density | 7600 kg/m3 |
| Allowable stress | 620 Mpa |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, C.; Lu, Y.; Liu, S.; Li, Z.; Gu, Z.; Shao, W.; Li, C. Research on Optimization Design of Fully Parameterized Pump-Jet Propulsion. J. Mar. Sci. Eng. 2022, 10, 766. https://doi.org/10.3390/jmse10060766
Wu C, Lu Y, Liu S, Li Z, Gu Z, Shao W, Li C. Research on Optimization Design of Fully Parameterized Pump-Jet Propulsion. Journal of Marine Science and Engineering. 2022; 10(6):766. https://doi.org/10.3390/jmse10060766
Chicago/Turabian StyleWu, Chunxiao, Yu Lu, Shewen Liu, Zhiyuan Li, Zhuhao Gu, Wu Shao, and Chuang Li. 2022. "Research on Optimization Design of Fully Parameterized Pump-Jet Propulsion" Journal of Marine Science and Engineering 10, no. 6: 766. https://doi.org/10.3390/jmse10060766