3.1. The Conditions of Forming the CZ
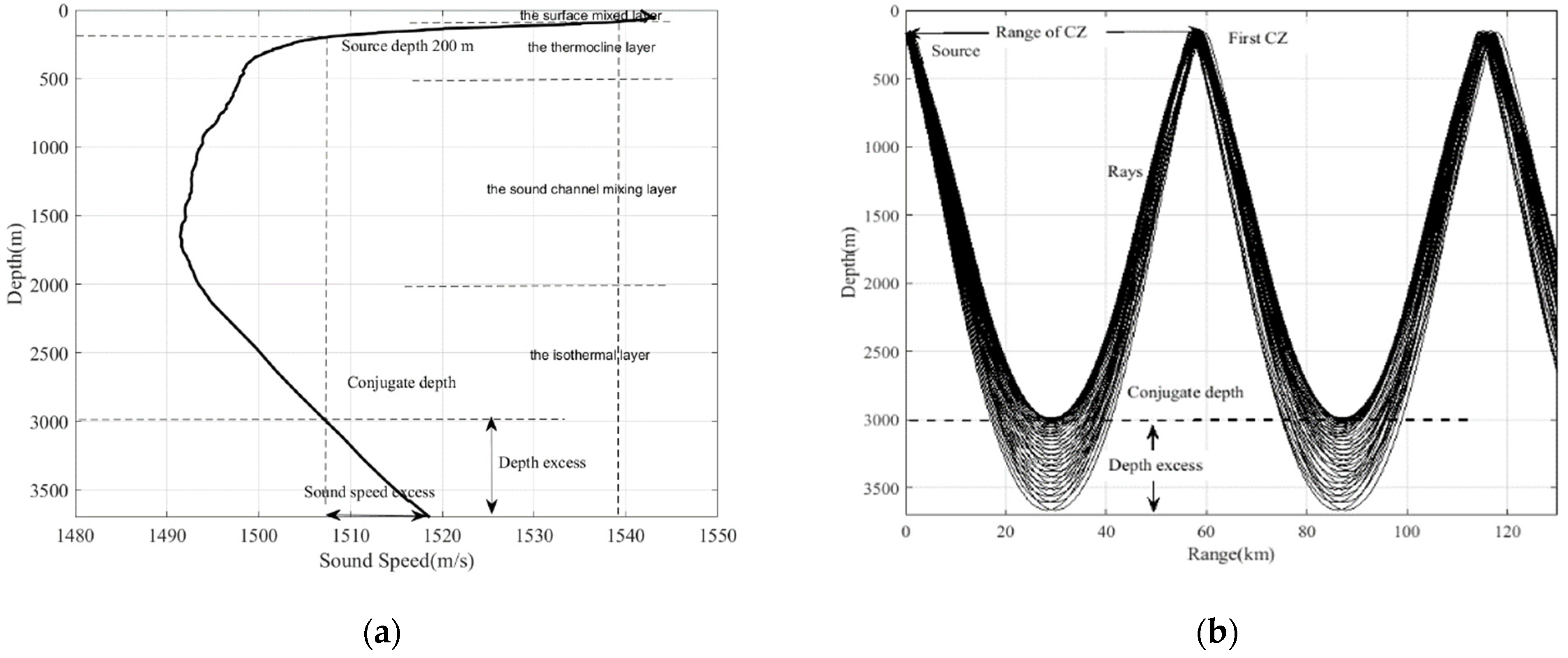
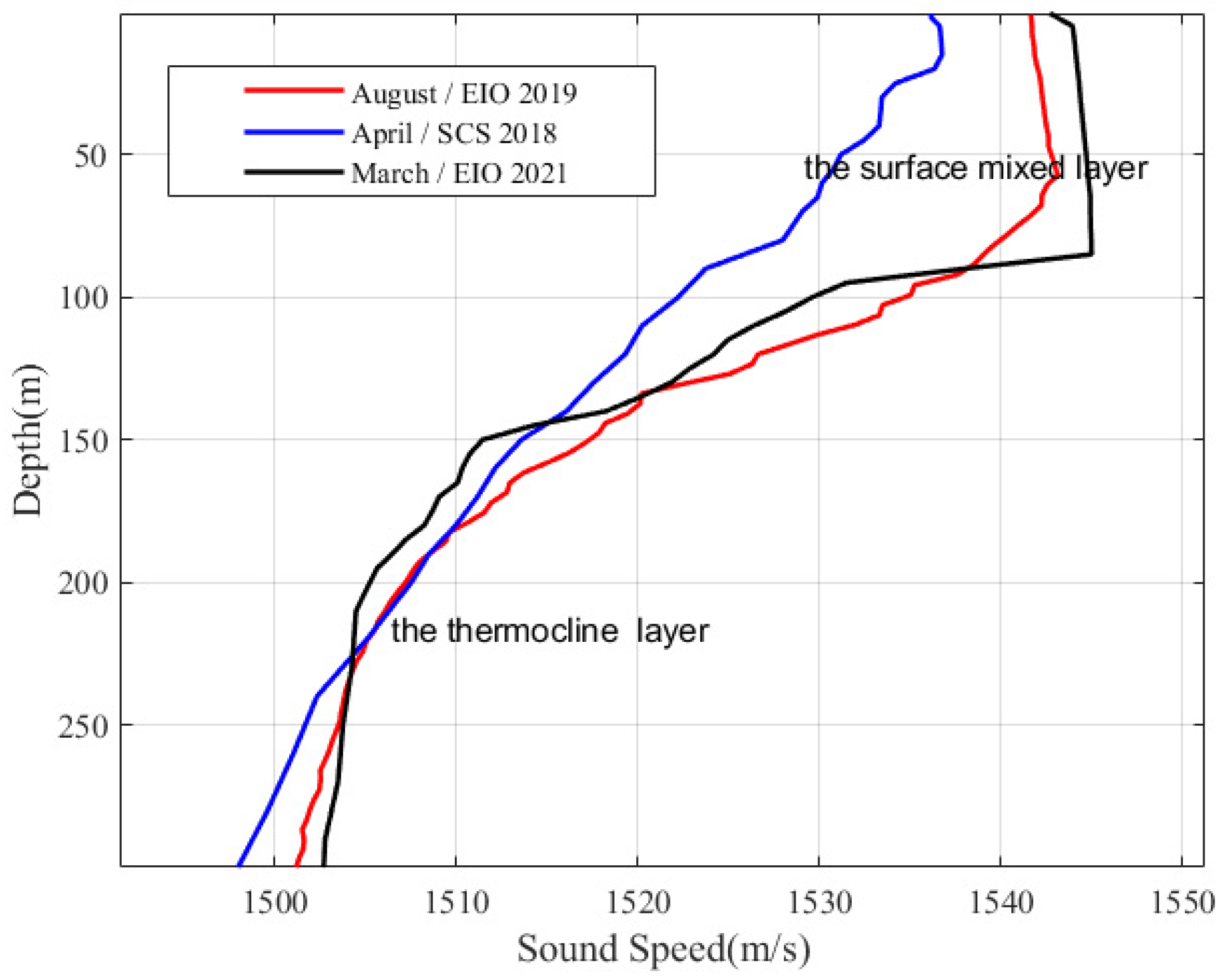
The vertical temperature structures of the ocean can, in general, be divided into four layers as shown in
Figure 7a: the surface mixed layer, the thermocline, the sound channel mixing layer, and the isothermal layer with weak vertical temperature gradient. The depth where the sound speed is equal to that at the sound source is called the conjugate depth or critical depth. The region below the conjugate depth to the bottom is called the depth excess, and the difference between the sound speed at the conjugate depth to the bottom is called the sound speed excess. The range of CZ refers to the location of the sound source to the first sound rays inversion convergence to the sea surface, as shown in
Figure 7b.
When a source is close to the surface, according to the Snell law, the sound rays bend toward the vertical. In other words, the sound rays emitted by the source will bend to the bottom. The sound rays will gradually bend toward the surface after passing through the sound channel axis where the sound speed is minimum, where sound speed increases with depth in the deep isothermal layer because of the increase in pressure. When the sound speed near the bottom is greater than that close to the source, some sound rays with small grazing angles do not touch the bottom and reverse upward near conjugate depth. After this process, sound rays converge at the surface to form a CZ.
To form a CZ, both the sound source and receiver should be placed in the sound channel, and the water depth should be great enough to reach the conjugate depth. If there is a depth excess in the deep-water waveguide, some deep refracted sound rays do not touch the ocean bottom. These rays are refracted upward to the sea surface and are focused together to form a CZ close to the surface.
The sound speed is determined largely by the water temperature. Thus, water temperature near the sea surface and the water depth in any particular area will largely determine whether sufficient depth excess exists and therefore whether a CZ will occur. Charts of surface temperature and water depth can then be used as basic prediction tools for ascertaining the existence of CZs.
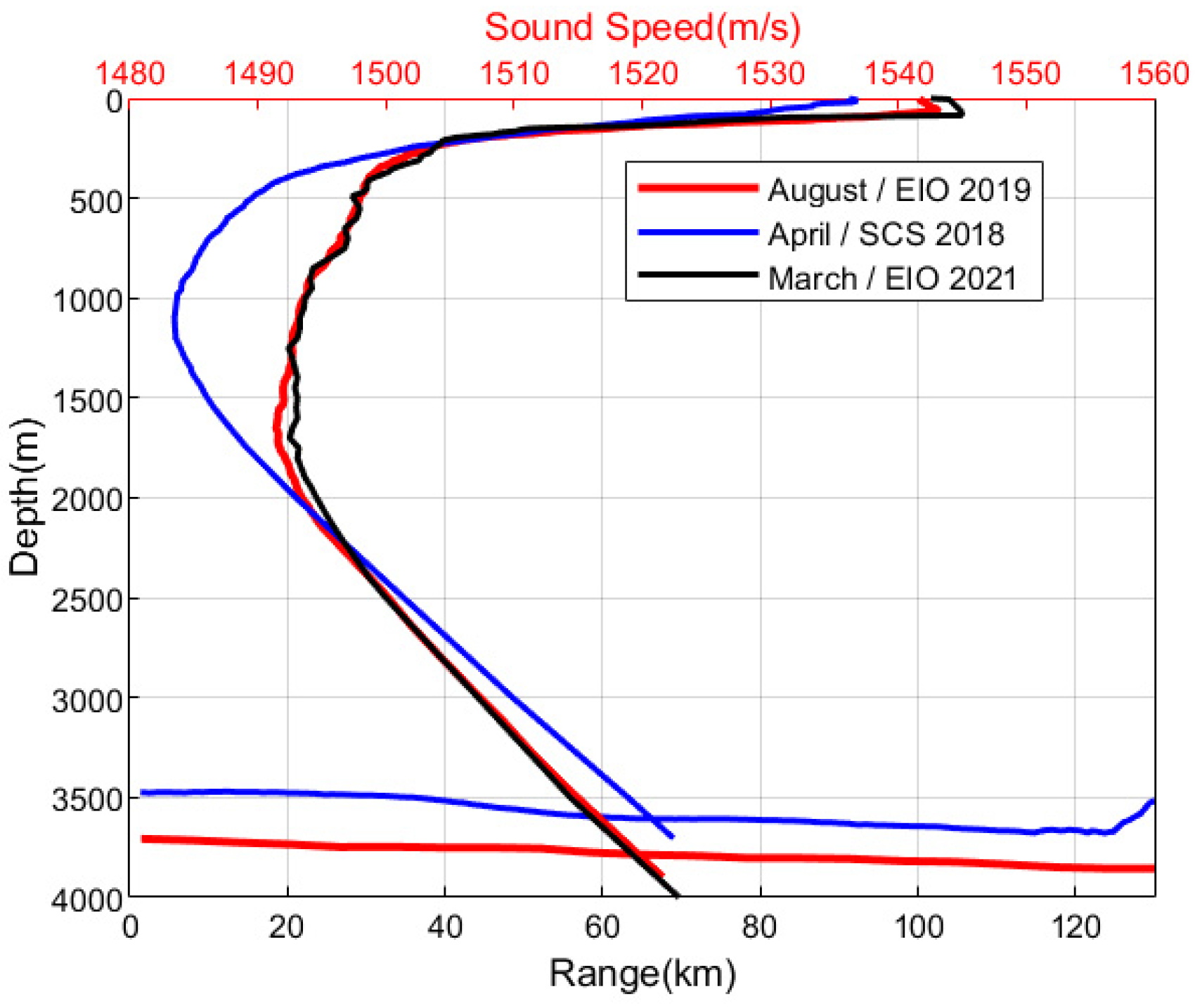
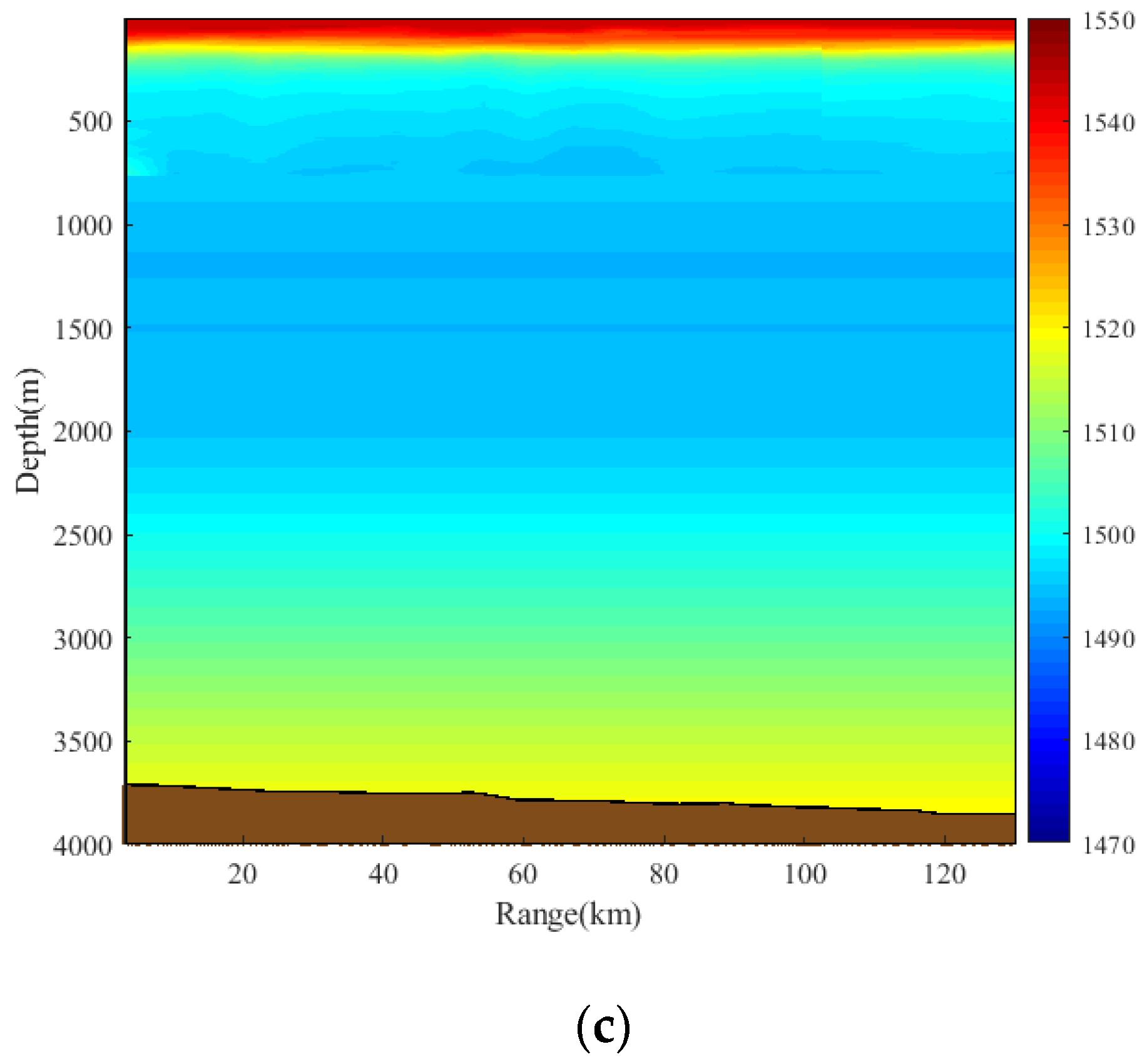
As seen in the sound speed profiles in these two ocean areas shown in
Figure 3, the sound speed at the source is less than that at the bottom, so CZs will occur in both the EIO and SCS.
3.2. The Theoretical Analysis on the CZ Range
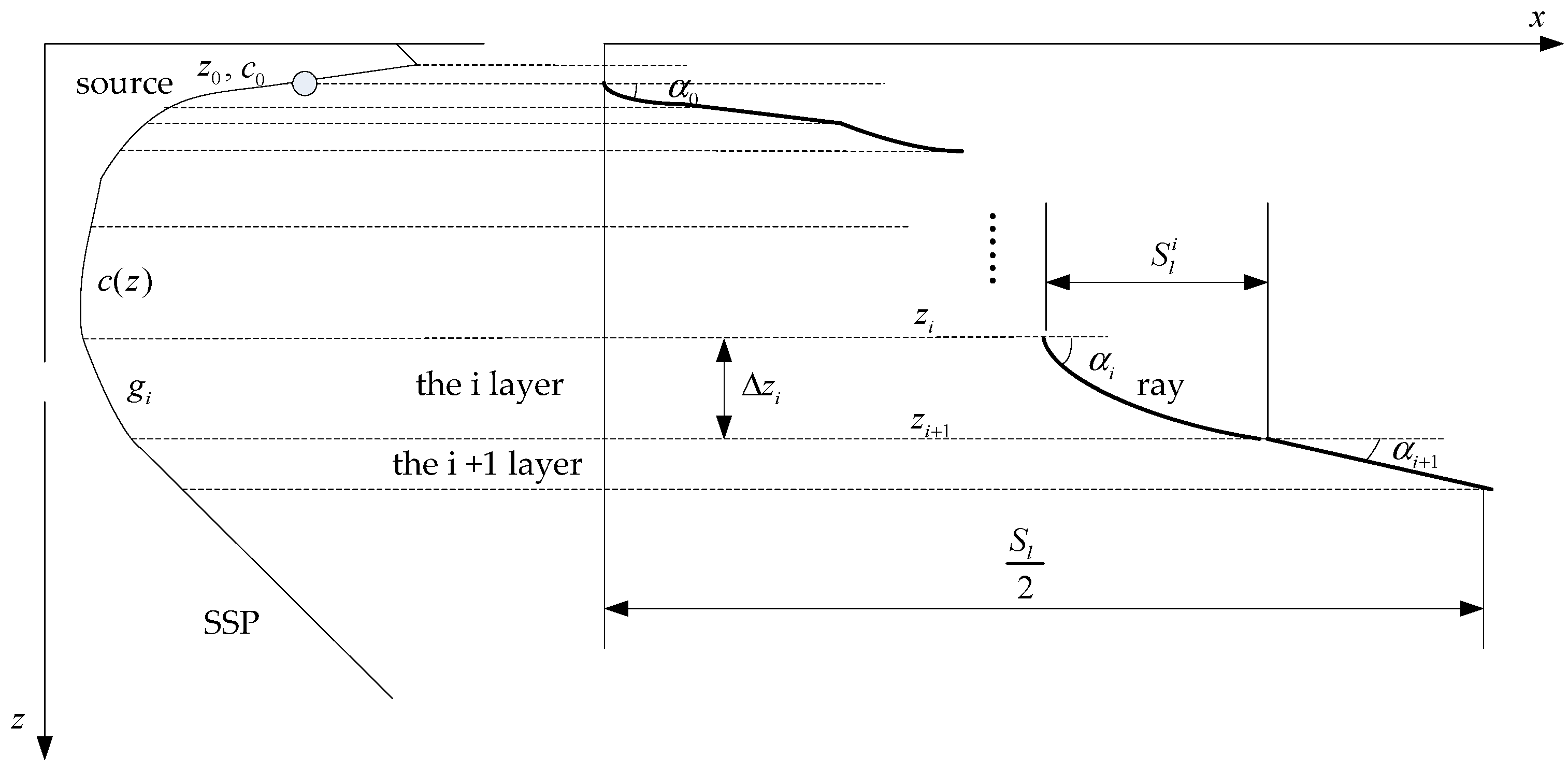
To explain the effects of the sound speed profile structure on the CZ range, we use the numerical calculation to predict the CZ range in the underwater environment. As we know, the sound speed profile can be described as the function of the depth. The linearization of the sound speed profile to obtain the horizontal range of sound ray has been widely used [
1]. We analyzed the CZ range by calculating the horizontal range, and the linearized sound speed profile and the sound rays are shown in
Figure 8.
For linear layered media, the horizontal distance of the sound ray through each sound speed layer is defined as the horizontal range
, which can be expressed by the wave number, and its expression [
13] is:
where
N is the number of the layered media,
and
are the top and bottom depths of the layer
I, respectively,
is wave number at the depth
, and
is horizontal wave number.
The analytical solution of the horizontal range through a linear layered medium in Ref. [
5] is:
where
and
are the sound ray initial grazing angle and sound speed at the source depth of
, respectively.
is sound velocity gradient of the layer
i,
and
the sound ray grazing angles at the
and
depths, respectively.
With the theoretical expression of the horizontal range, the CZ range can be obtained with higher accuracy from the given source depth and the known hydrological conditions of sound propagation. The calculation of the CZ range can be simplified as the horizontal range of the sound ray with a grazing angle of 0° nearest the bottom. This sound ray has the maximum reversal depth.
During the experiment, the SSP was acquired from measurements based on time or space sampling. The accuracy of the vertical distribution is sufficient to reflect the characteristics of the actual continuous SSP. The segmented broken line is used to replace the actual continuous SSP. This linear approximation method of sound speed is relatively simple and has been widely used [
1]. In the following, the SSPs actually measured in the experiments will be segmented, and the theoretical estimation of the CZ range in the two environments will be carried out through iterative calculation according to Equation (4).
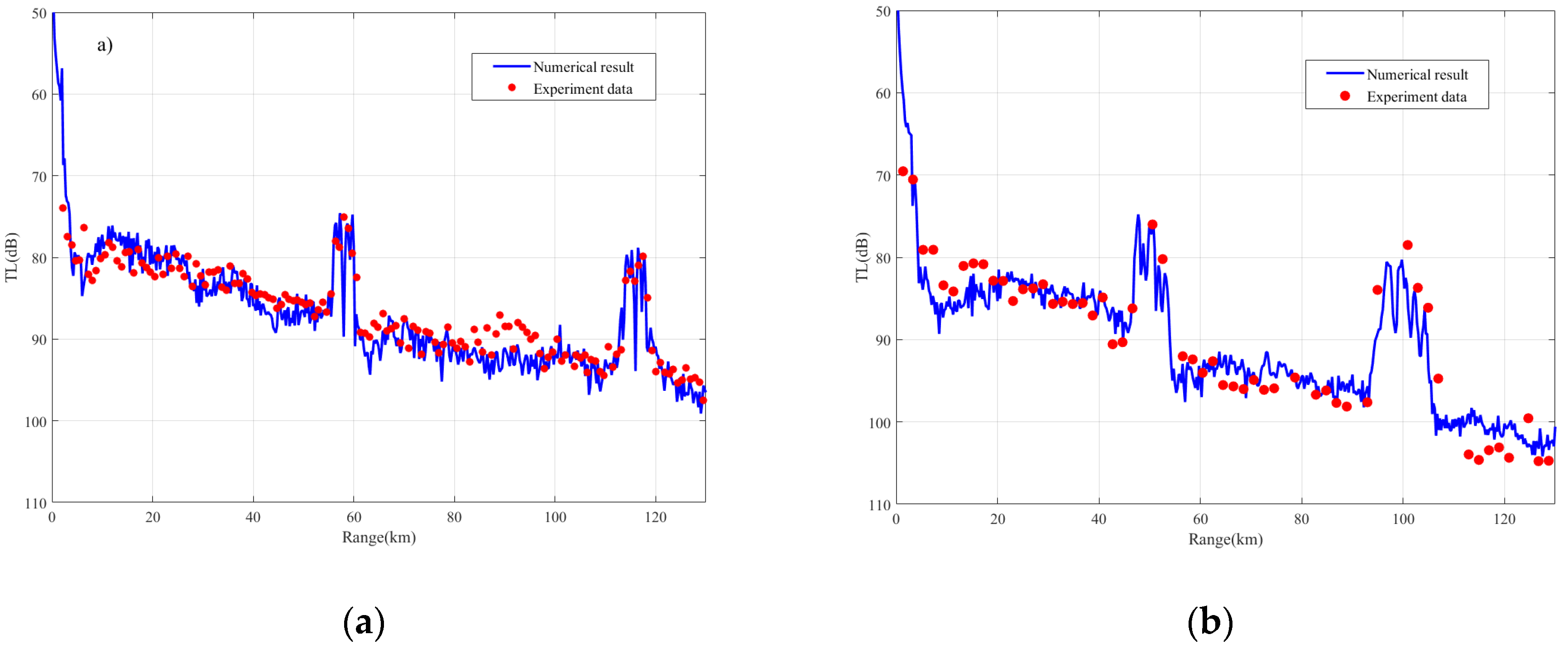
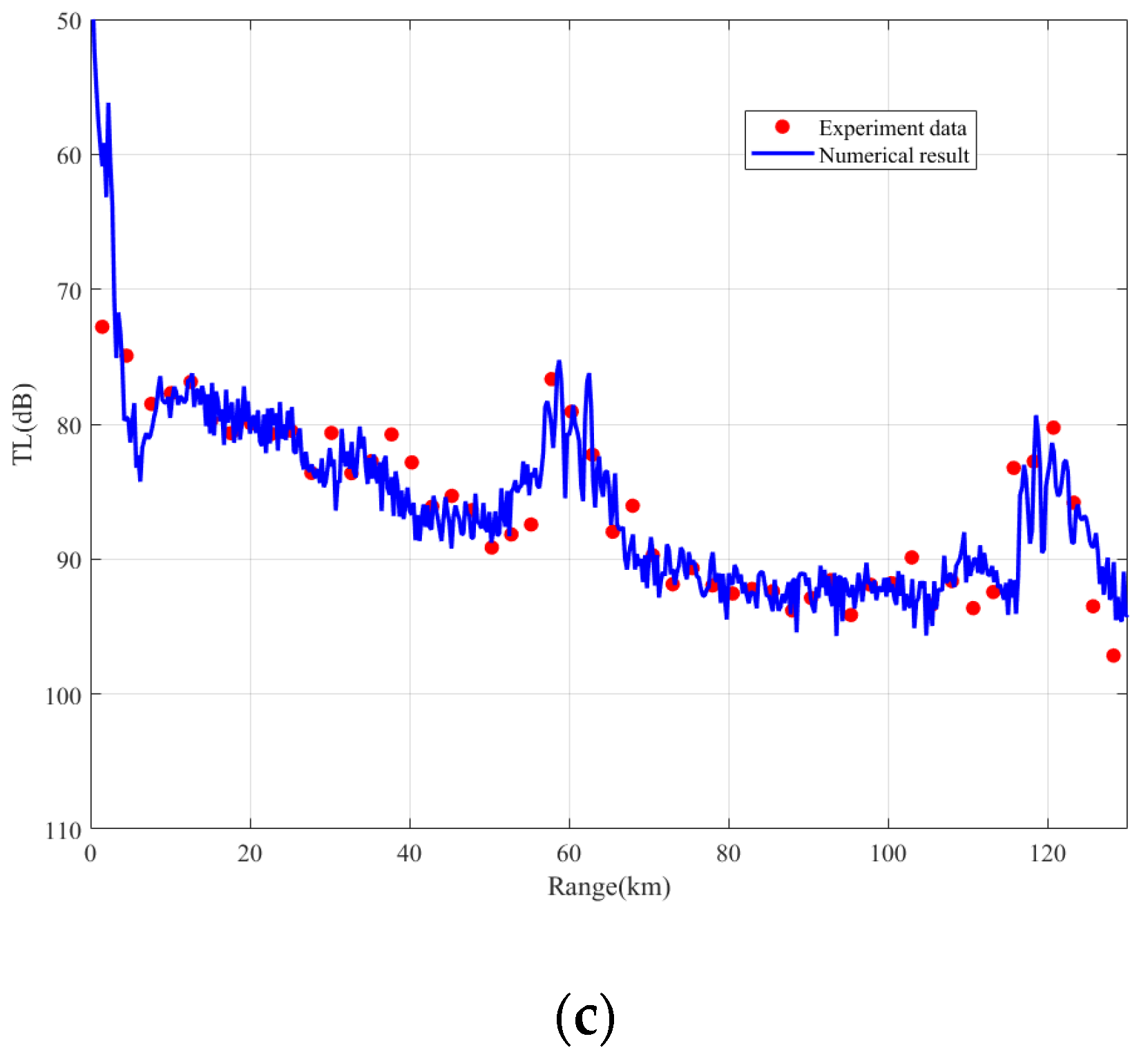
As defined above, the range of the sound ray with a grazing angle of 0° on the seabed is the first CZ range. According to the Snell law, the exit angle at the source is 6.9° for the ray with a grazing angle of 0° at the seabed in the EIO 2019. Similarly, the exit angle of this ray is 8.5° in the SCS 2018 and that of 7.5°in the EIO 2021. Substituting the exit angles into Equation (4), we get that the first CZ ranges in the EIO 2019, EIO 2021, and SCS 2018 are 58.6 km, 61.1 km, and 49.3 km, respectively, using a software of Matlab simulation calculation. The result is basically consistent with the CZ range obtained from the experimental data of the two sea areas shown in
Figure 6.
From the theoretical analytical Equation (4) of the horizontal distance of the sound ray, it can be seen that the horizontal range of the sound ray is related to the source depth and the initial grazing angle. However, is constant. Therefore, the CZ range is mainly related to the sound speed gradient , which is the characteristics of the SSP structure.
3.3. Numerical Simulation and Analysis the CZ Phenomenon of the Two Sea Areas
Based on the standard model of SSP, Zhang et al. [
14] analyzed the influence of some special environmental parameters on the convergence area, including the thermocline, mixed channel layer, isothermal layer, and sound channel axis. However, the actual changes of SSP in the ocean are complex and cannot be represented by simple changes in model parameters. Moreover, the SSPs from different areas may have great differences and cannot be described by the same model. According to the comparison of the hydrological environment of the EIO and SCS as shown in
Figure 3, the difference of the SSPs from the two sea areas is the main reason why the CZ range of the EIO is farther than that in the SCS. At the same time, the SSPs from the same sea areas but in different seasons may affect the convergence zone ranges and widths.
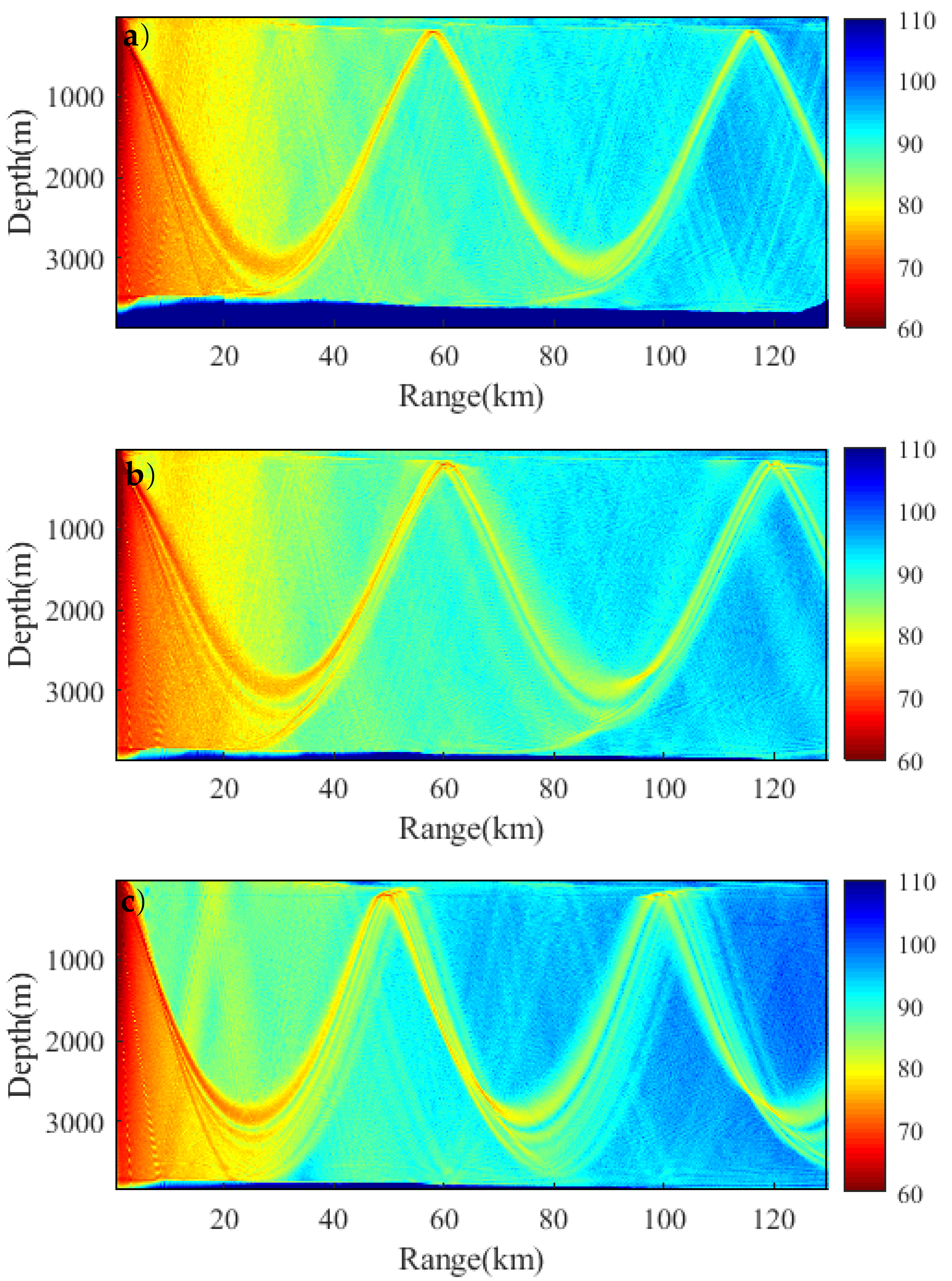
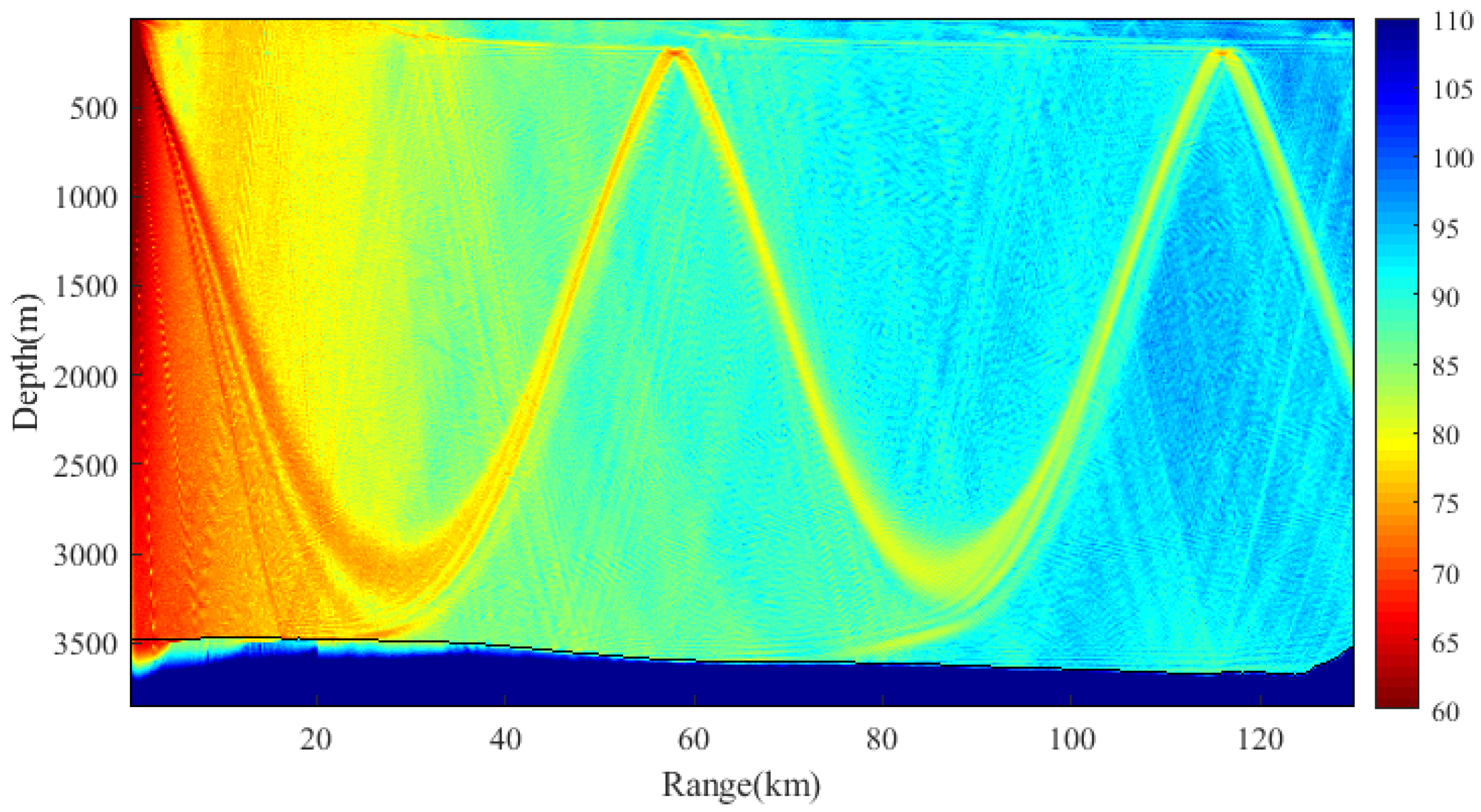
Figure 9 gives the simulated TLs using the environmental parameters measured in three experiments by the RAM-PE model, in which source depth is 200 m, and the central frequency is 300 Hz. We can observe that the range and width of the CZ vary in different environments. To illustrate the problem, we choose the same conditions of sound propagation in the model simulation, in which source depth is 200 m, central frequency is 300 Hz, and receiver depth is 255 m. The result is shown in
Figure 10.
From
Figure 9 and
Figure 10, we observe that the range and width of the first CZ in the EIO is 7–8 km farther and about 2–3 km narrower than that in the SCS at the same receiving depth. When the propagation conditions change within seasons in the EIO, the range of the first CZ is almost the same but slightly greater, but the width of the CZs in the summer is narrower by about 2 km than in the spring.
First, we will explain the reasons for the different CZ ranges and widths in two sea areas. Then, we will explain the reasons for this phenomenon of condition change within seasons in the EIO.
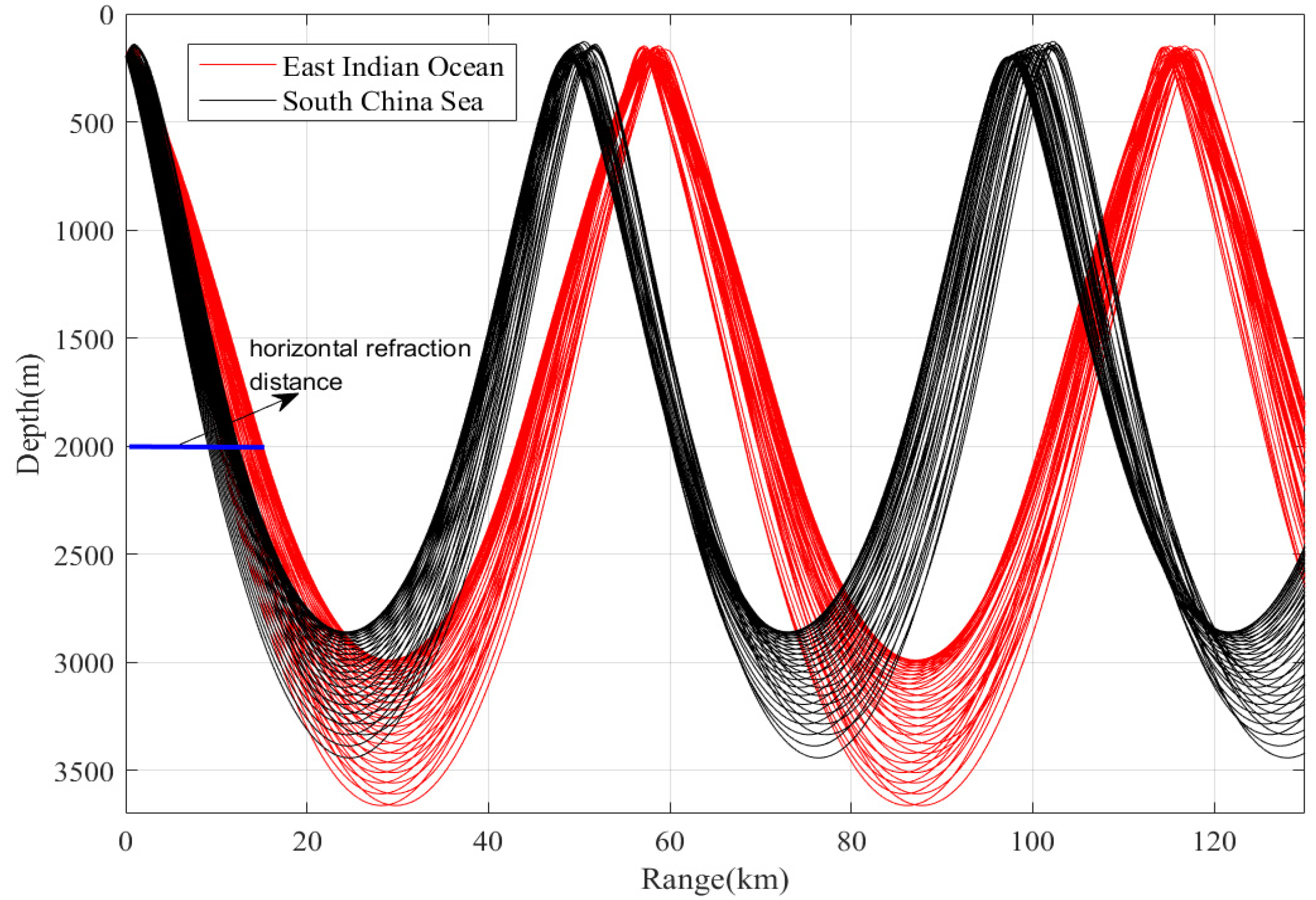
To explain the difference of CZ ranges between the EIO and SCS, the corresponding sound rays in these two sea areas are calculated by the Bellhop ray model [
25], as shown in
Figure 11.
From
Figure 11, we observe that the first CZ ranges in the EIO (about 58 km) and SCS (about 50 km) are basically consistent with the CZ range calculated using the experimental data of the two areas. We can also observe that sound ray refraction is strong in the near field in the EIO because of the greater change of sound speed in the shallow depths. At the same time, the strong refraction causes sound rays to enter the sound channel mixing layer with different grazing angles. As shown in
Figure 11, between 1000 m and 2000 m depth, the rays have a smaller grazing angle in the EIO relative to that in the SCS. As shown in
Figure 9 and
Figure 11, at the depth of 2000 m, the horizontal refraction distance (indicated by the blue line in the
Figure 11) of the EIO is 15 km, and the distance is 11 km in the SCS. That is because of the relatively slow change of sound speed in the mixed channel layer of the EIO. There is an extensive constant sound speed layer in the channel. In this channel, the sound rays propagate along approximately a straight line in the EIO and the sound rays bends upward when they cross the sound channel axis in the SCS. So the horizontal refraction distance in the EIO is larger than that in the SCS. In addition, the grazing angles of the sound rays are also smaller when they enter the isothermal layer. A smaller grazing angle results in a greater horizontal refraction distance when the rays pass through the approximate depth excess. At the same time, the gradient of sound speed in the deep-water isothermal layer of the EIO is smaller than that of the SCS. It can be seen from the horizontal range of the sound ray in Equation (4) that the smaller the gradient
of the sound speed, the less refraction of the sound rays, and the greater the horizontal range will be. This is also one of the reasons why the CZ in the EIO is farther away from the source.
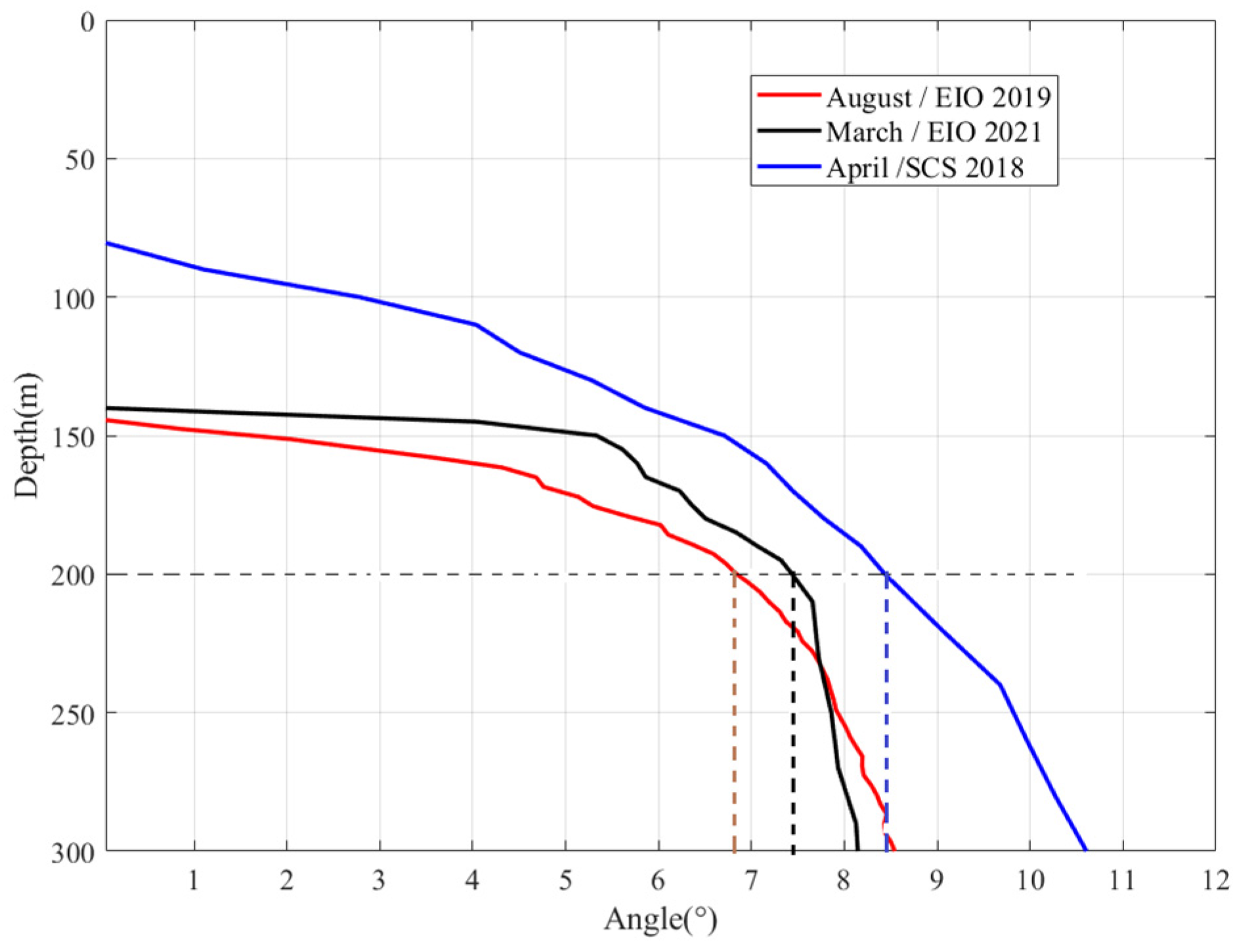
The sound ray with a grazing angle of 0° at the ocean bottom does not come into contact with the bottom. This ray is dominant to form a CZ at the sea surface. According to the Snell law, the emission angle of the sound ray at the source is:
where
(
) is the sound speed in water at the source depth,
c(D) is the sound speed in water at the bottom depth. When the grazing angle
at the source meets the condition
(
)/
c(D)), the sound rays would converge and, at this time, have a grazing angle of 0° at the ocean bottom.
c(D) is known, and
(
) varies with the depth of the sound source
. Under the preconditions Equation (5) of the CZ formation, from the detailed sound speed, we get the curve of the source depth
with the maximum emission angle
of a ray refracting at the bottom, as shown in
Figure 12.
It can be deduced that when the source depth is 200 m, some emitted sound rays do not touch the bottom and then form CZs in the three experiments. When the grazing angle at the bottom is 0° in the EIO 2019, the maximum grazing angle of the sound rays emitted from the sound source is 6.9°, 7.5°, and 8.5° in the EIO 2021 and the SCS 2018, respectively. The sound rays within the grazing angle range of [−6.9°, 6.9°] will refract before approaching the bottom. Similarity, the sound rays within [−7.5°, 7.5°] are to form a CZ in the EIO 2021 and rays within [−8.5°, 8.5°] are to form a CZ in the SCS 2018. So the width of the CZ is narrowest in EIO 2019, and widest in SCS 2018, the width of the CZ in the EIO is about 2–3 km narrower than that in the SCS, and the width of the CZ in the EIO in summer is narrower by about 2 km than that in the EIO in spring because fewer refracting rays are received at the receiver in the CZ. We also see that the sound energy propagated in the deep-water CZ mainly comes from sound rays with small grazing angles.
For a source at 200 m, the conjugate depth is about 3000 m for the two experiments. The depth excess in the EIO is larger than that in the SCS. However, compared with the SCS environment, the CZ contains fewer refracting rays with a small range of angles in the EIO. At the same time, the sound rays reflect drastically at the sea surface, and converge quickly. This is the reason why the CZ width in the EIO is relatively narrow.
Previously, we analyzed the difference of CZ range and width caused by different structures of SSP in the two areas, and next we will focus the following analysis on how the changes with different seasons in sound speed profile affect the CZ propagation.
According to the measured SSP in the EIO and SCS shown in
Figure 3, the variation of SSP mainly focuses on the surface mixed layer and the thermocline with seasons (detailed changes are shown in
Figure 13). The SSP showed that the SSP of the SCS and the EIO are completely different, especially in the sound channel mixing layer and the isothermal layer. Meanwhile, the sound speed in March is larger than that in August in the surface mixed layer, and the sound speed decreases strongly with depth in the thermocline layer, but the sound channel mixing layer and the isothermal layer changes very little within seasons in the EIO.
From the sound speed profiles and
Figure 12, we see that the value of sound speed at 145 m is equal to that at the bottom for the experiments of the EIO 2019 and the EIO 2021, while the corresponding depth is about 80 m in the SCS 2018. When the source depth is larger than these above depths, there is a depth excess, which is the condition of forming the CZ. The main reason that makes the range of the first CZ almost the same in two seasons is that the sound channel mixing layer and the isothermal layer are almost the same and there are few change with seasons. In addition, the rays in EIO are close to the seabed, but there are still no rays to reach the shallow depth. Because the depth of source is 200 m, the refracted rays cannot reach to the depth of 0–145 m in the first CZ at the range of about 60 km, so the changes of the SSP in the surface mixed layer have no effect on the CZ propagation. Because of the changes of the thermocline layer, the sound speed at the source changes, therefore affecting the grazing angles and the CZ width. Due to the influence of the small changes of the sound speed in the thermocline layer, the CZ range in March is slightly greater than that of August. We can draw a conclusion that the CZ range is mainly affected by the sound channel mixing layer and the isothermal layer, but little affected by the thermocline layer when the depth of the conjugate depth of the ocean bottom is below the surface mixed layer.
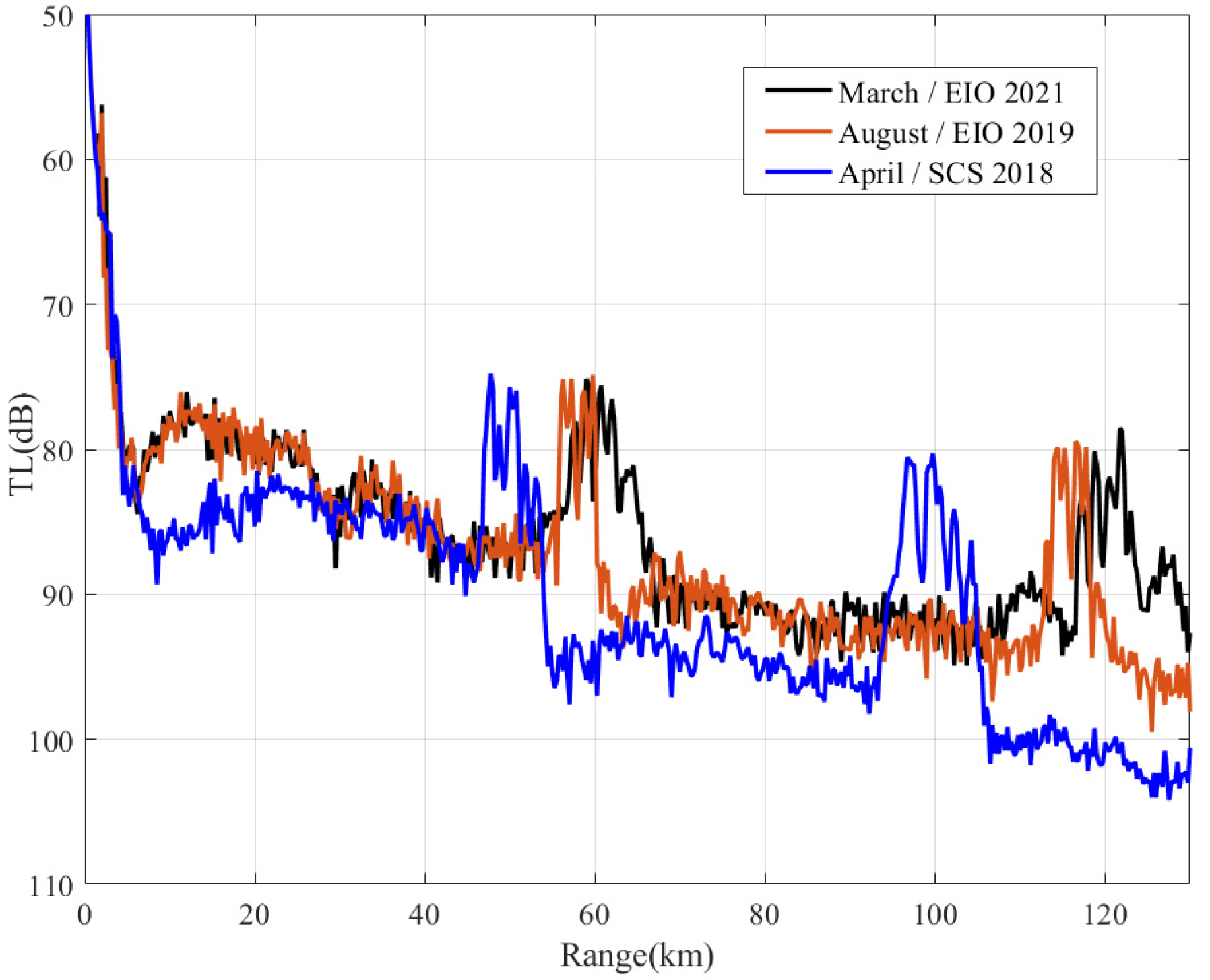
For source depth of 200 m and receiving depth of 255 m, first CZ range and width of the EIO and SCS from the experimental results in
Figure 6, simulations and Equation (4) are listed in
Table 1, respectively. Differences between the errors have been expressed in percentages in
Table 1. We get the errors for experimental data or simulation between the results of calculation by Equation (4) following the expression:
Since the experiment of the EIO 2021 did not receive data at the depth of 255 m, the CZ range error is not given.
As the table shows, the environmental data and the simulated data of CZ range and width compare very well in both the EOI and SCS. Taking the CZ range in
Table 1 for example, the range of the first CZ in the EIO is 7–8 km farther than that in the SCS, and the width of first CZ in the EIO is narrower than that in the SCS.
As explained above, when the water depth is not sufficiently deep, sound speed excess cannot provide sufficient space for sound ray refraction. The sound wave will interact with the bottom to cause rapidly energy decay, and the CZ cannot be formed. In order to analyze the influence of water depth on the CZ, we interchange the water depth of the EIO and the SCS in simulation. The simulation results using the SSP in the EIO and the water depth in the SCS is shown in
Figure 14.
Figure 14 shows that the CZ range is also about 58 km. Combined with the simulation result in
Figure 9a, we can see that for the same SSP but different water depth, the location of the CZ is basically the same. For the same water depth, the location of the CZ will be significantly different for different SSPs. When the CZs occur, the water depth has little effects on the CZ range. For the same SSP, the greater water depth, the greater depth excess, the greater angle range for sound ray emitted at the source forming a CZ. The CZ width at the same receiving depths becomes wider for greater water depth because of the larger grazing angle.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}