
Underwater Image Restoration via DCP and Yin–Yang Pair Optimization

Abstract
:1. Introduction
2. Background
2.1. Underwater Imaging Model
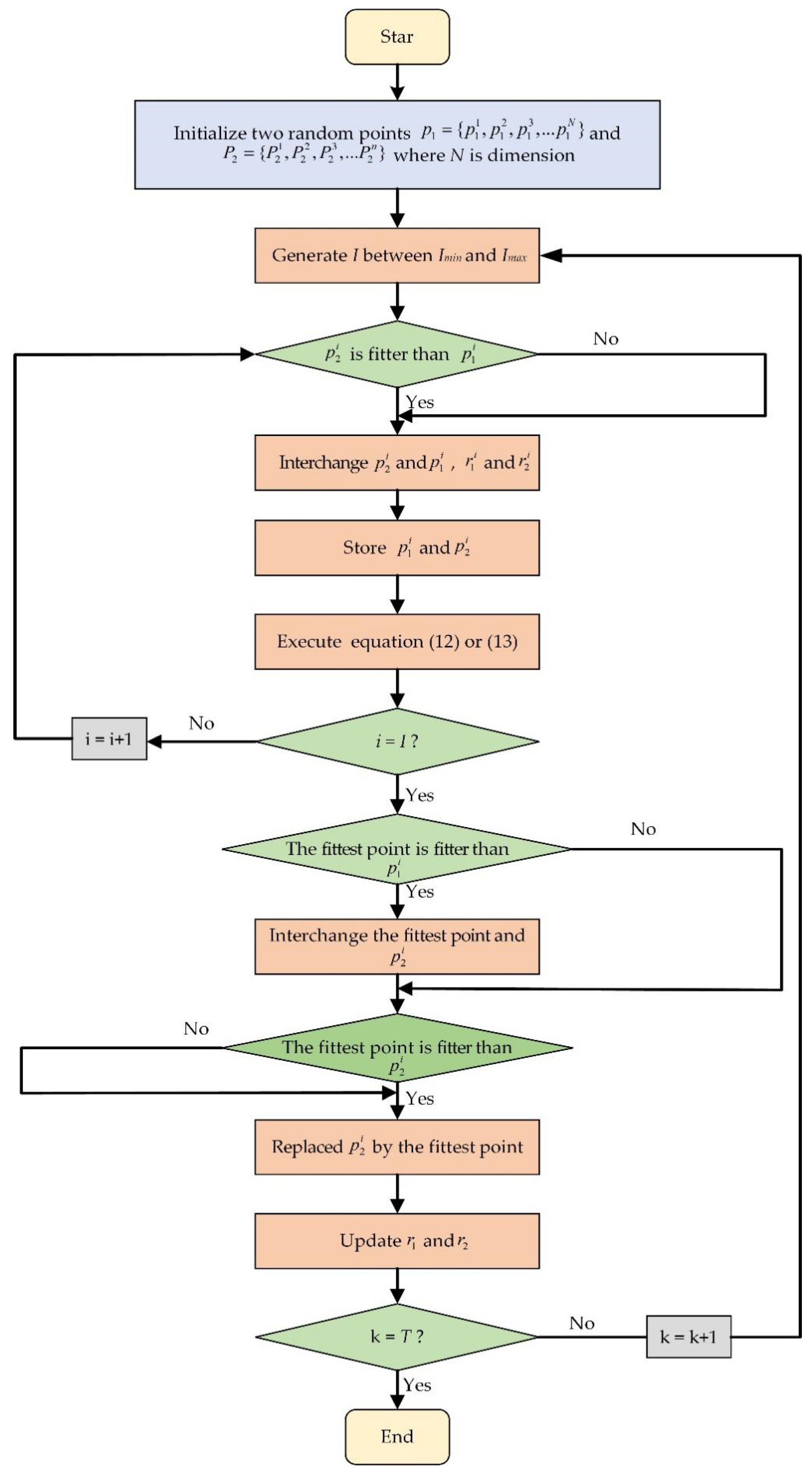
2.2. Yin–Yang Pair Optimization
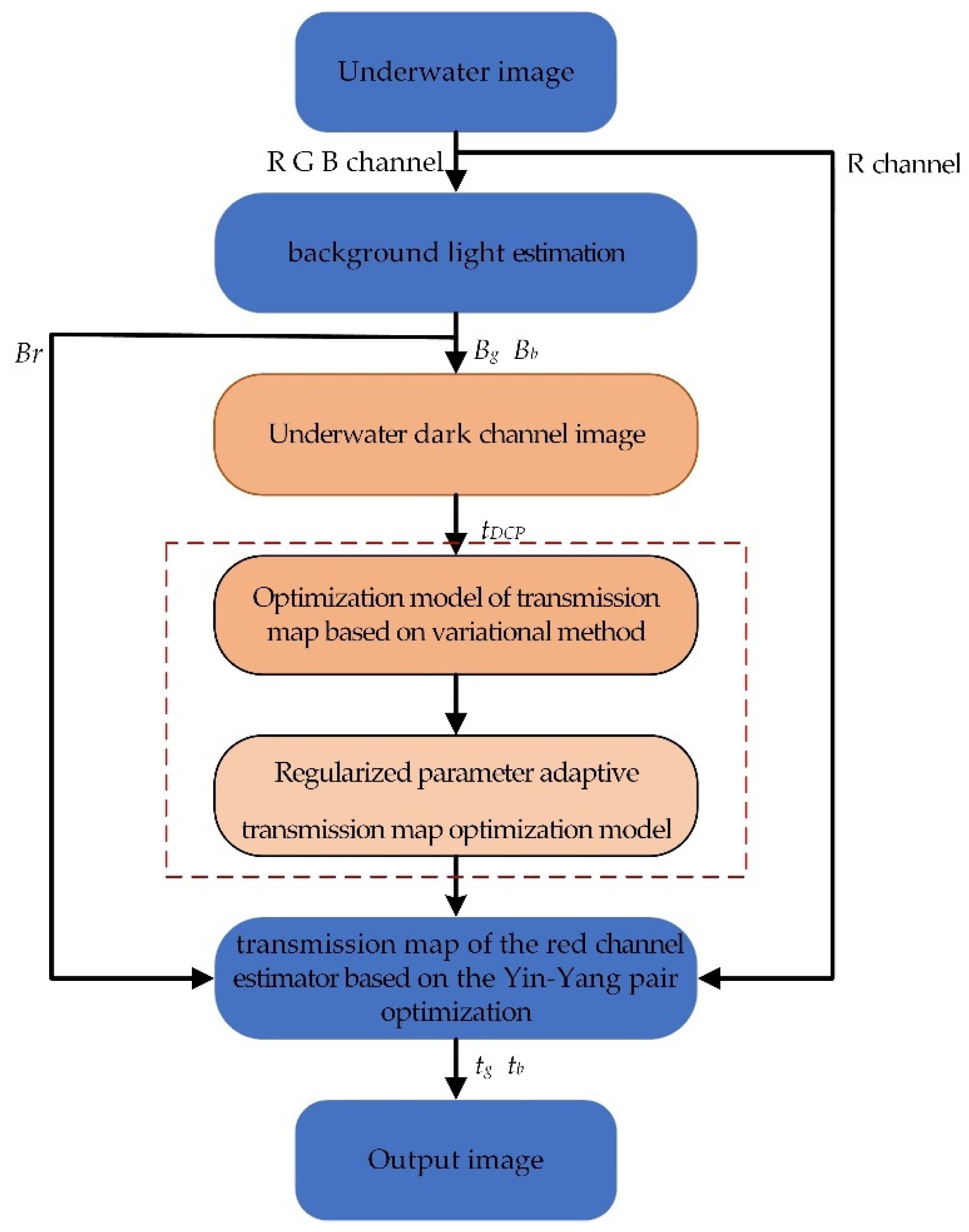
3. Proposed Novel Model
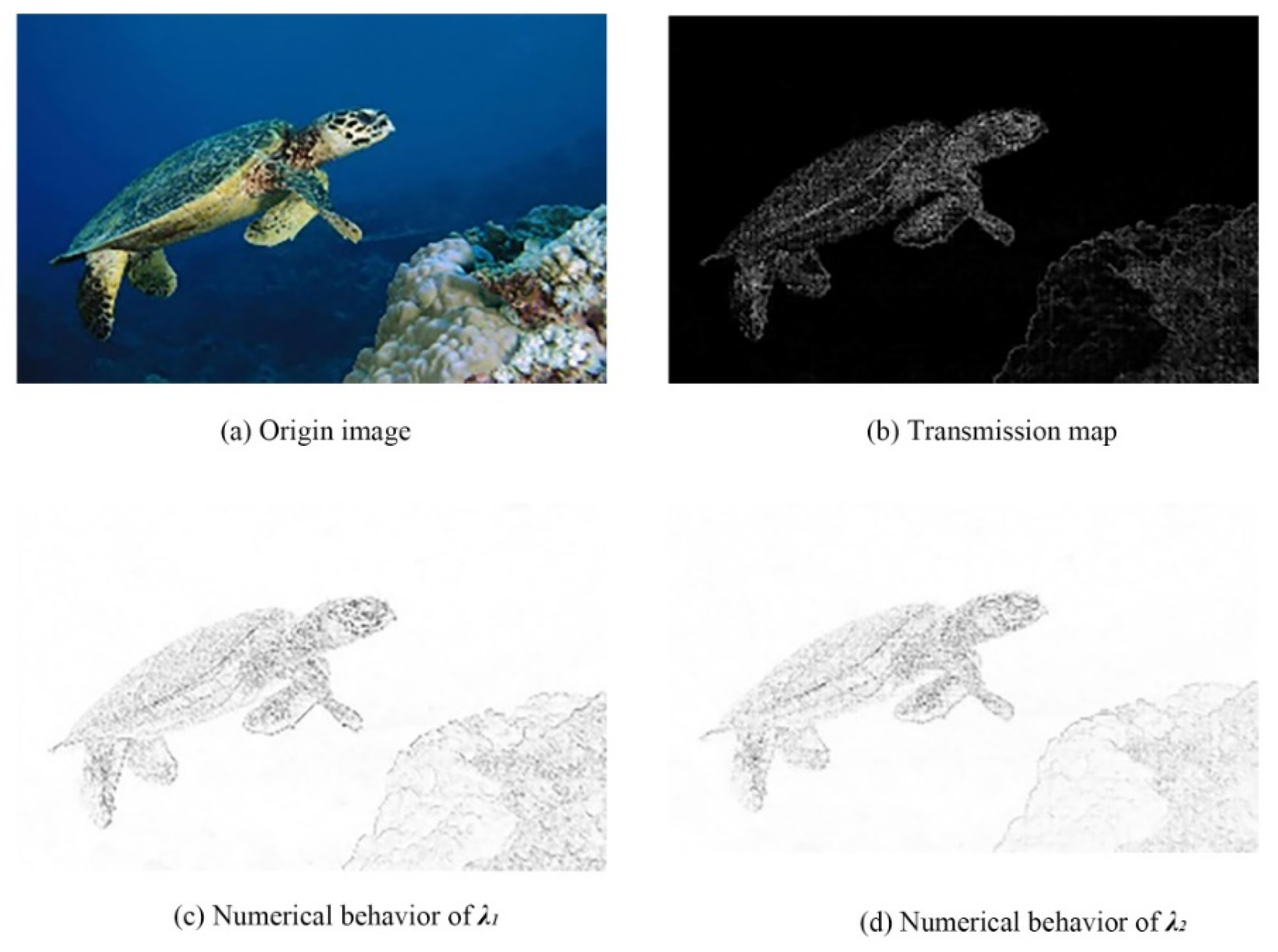
3.1. Novel Transmission Map Optimization Model
3.2. Transmission Map Optimization Model of Regularization Parameters
3.3. Red Compensation Based on Yin–Yang Pair Optimization
4. Experiments and Discussions
4.1. Evaluation of Objectives and Approaches
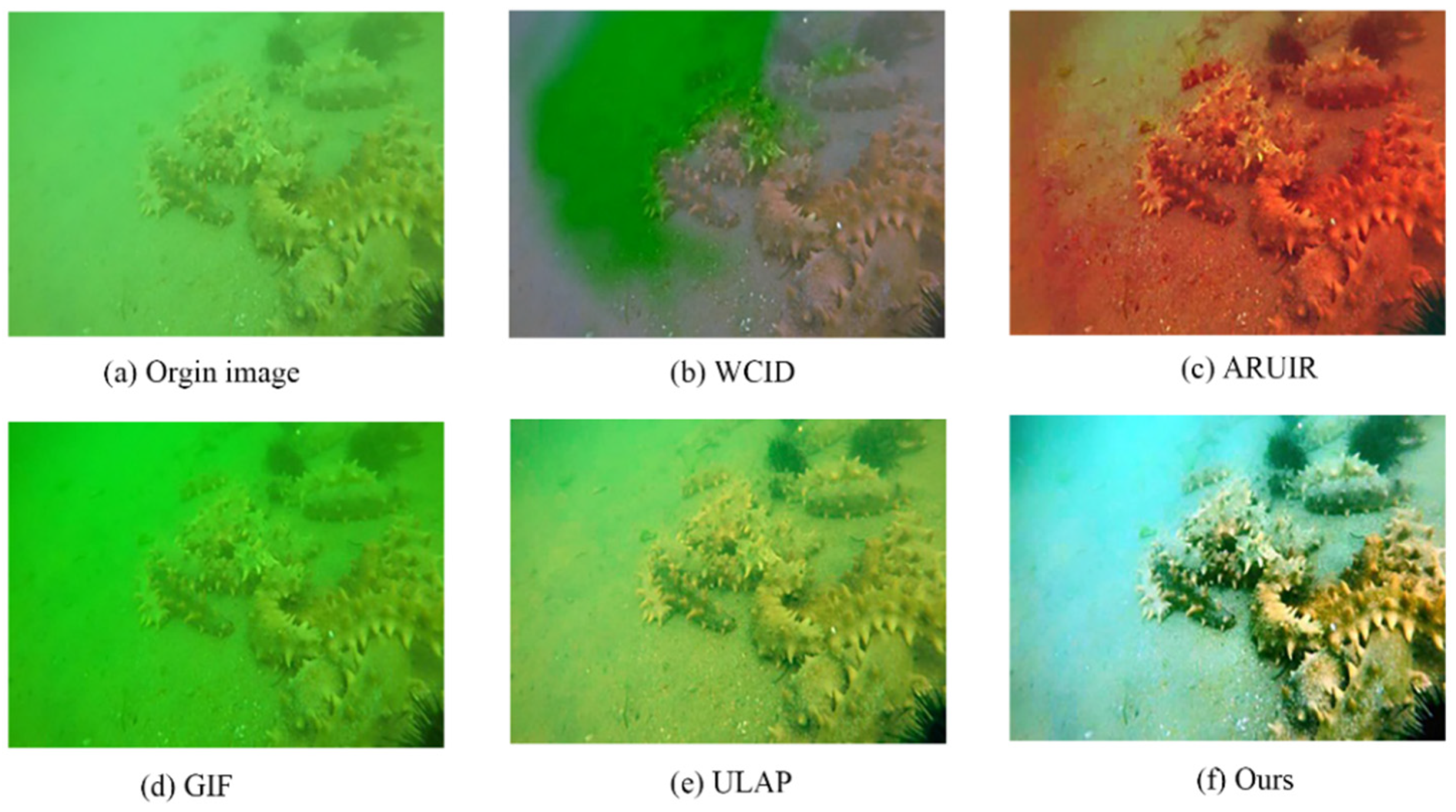
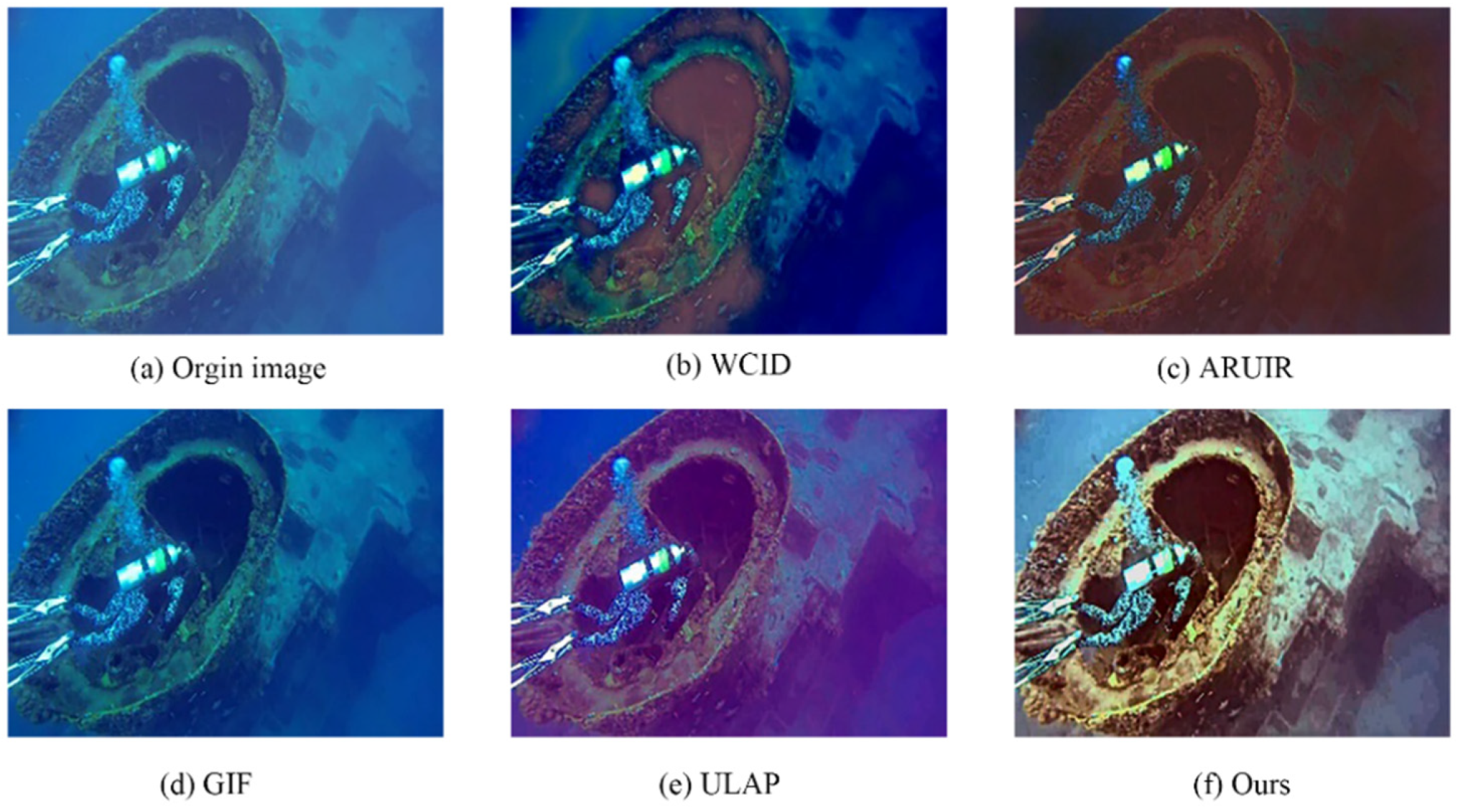
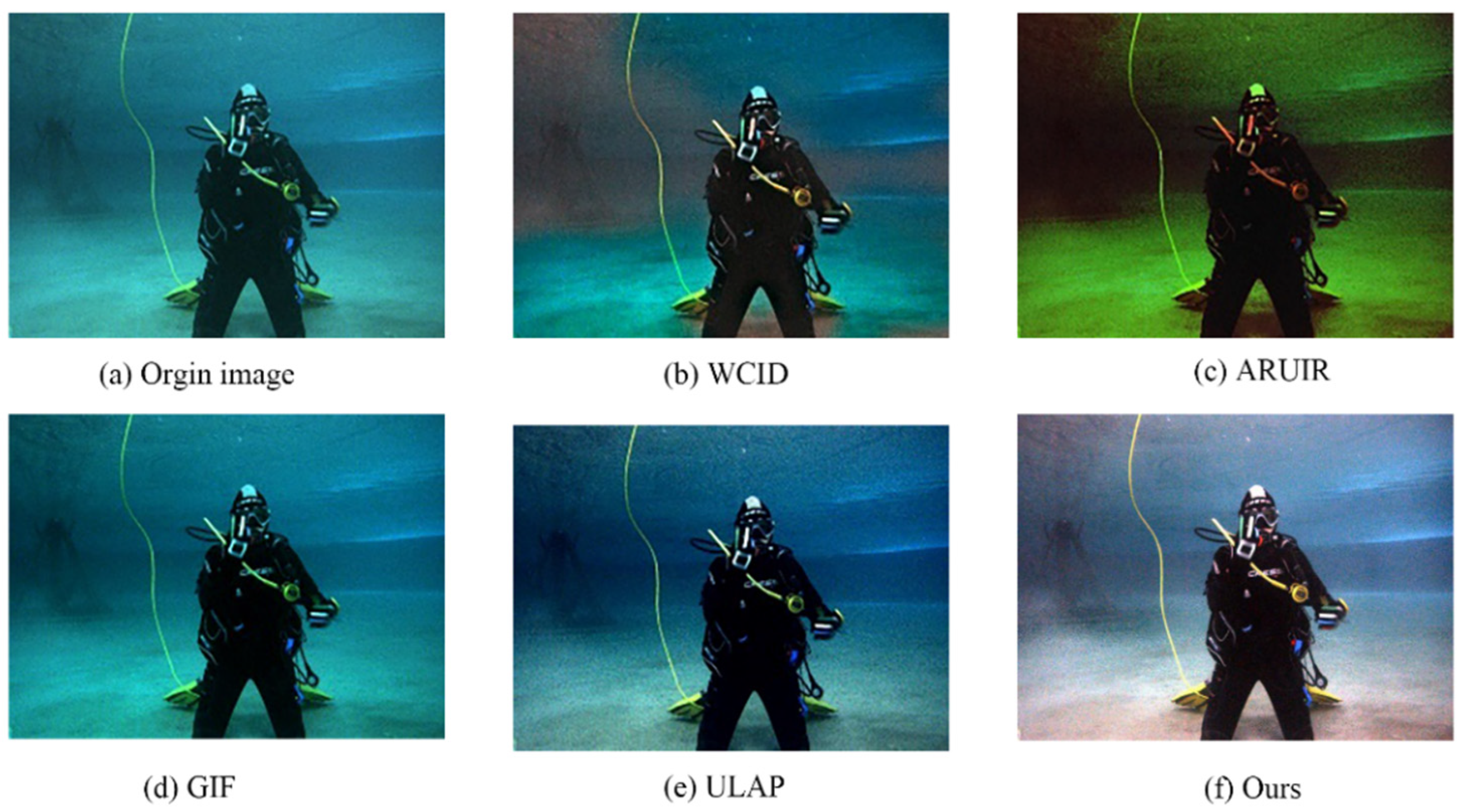
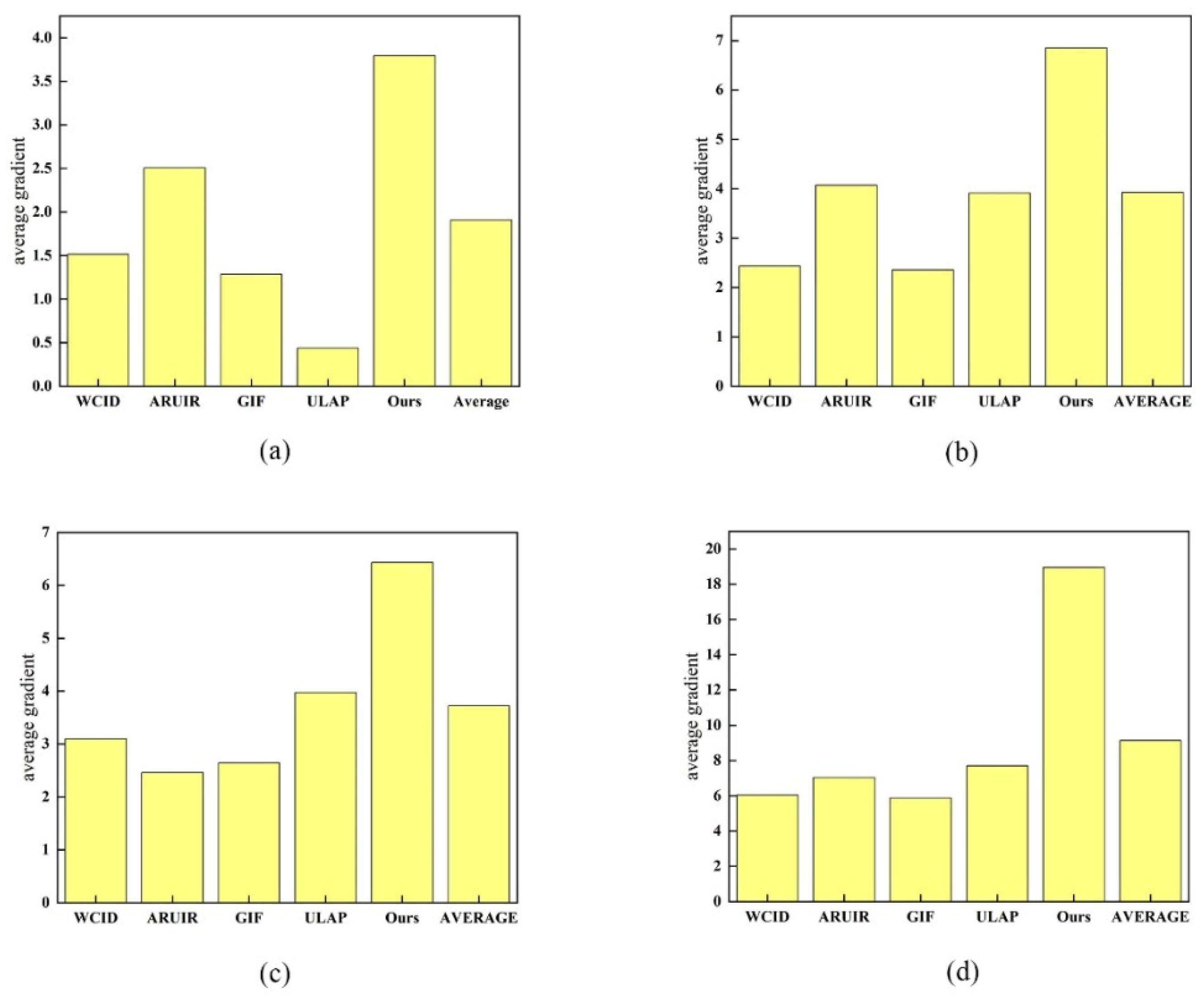
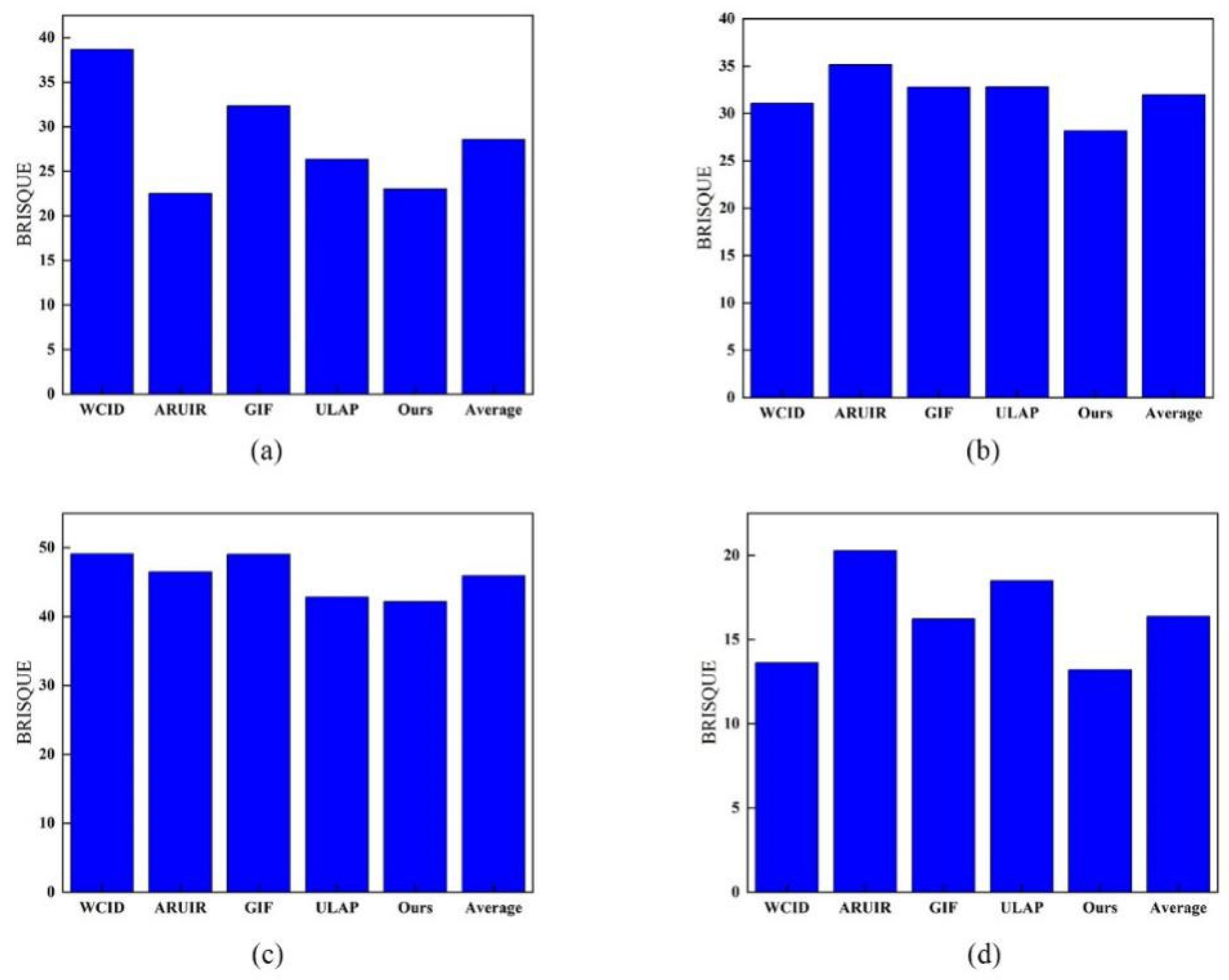
4.2. No Reference Image Restoration Effect Evaluation
4.3. Full Reference Image Restoration Effect Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ancuti, C.O.; Ancuti, C.; De Vleeschouwer, C.; Bekaert, P. Color Balance and Fusion for Underwater Image Enhancement. IEEE Trans. Image Process. 2018, 27, 379–393. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Drews, P., Jr.; do Nascimento, E.; Moraes, F.; Botelho, S.; Campos, M. Transmission Estimation in Underwater Single Images. In Proceedings of the 2013 IEEE International Conference on Computer Vision Workshops, Sydney, Australia, 2–8 December 2013. [Google Scholar]
- Amer, K.O.; Elbouz, M.; Alfalou, A.; Brosseau, C.; Hajjami, J. Enhancing underwater optical imaging by using a low-pass polarization filter. Opt. Express 2019, 27, 621–643. [Google Scholar] [CrossRef] [PubMed]
- Boffety, M.; Galland, F.; Allais, A.G. Influence of Polarization Filtering on Image Registration Precision in Underwater Conditions. Opt. Lett. 2012, 37, 3273–3275. [Google Scholar] [CrossRef] [PubMed]
- Narasimhan, S.G.; Nayar, S.K. Contrast restoration of weather degraded images. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 713–724. [Google Scholar] [CrossRef] [Green Version]
- Lu, H.; Li, Y.; Xu, X.; Li, J.; Liu, Z.; Li, X.; Yang, J.; Serikawa, S. Underwater image enhancement method using weighted guided trigonometric filtering and artificial light correction. J. Vis. Commun. Image Represent. 2016, 38, 504–516. [Google Scholar] [CrossRef]
- Ulutas, G.; Ustubioglu, B. Underwater image enhancement using contrast limited adaptive histogram equalization and layered difference representation. Multimed. Tools Appl. 2021, 80, 15067–15091. [Google Scholar] [CrossRef]
- Ancuti, C.; Ancuti, C.O.; Haber, T. Enhancing underwater images and videos by fusion. In Proceedings of the 2012 IEEE Conference on Computer Vision & Pattern Recognition, Providence, RI, USA, 16–21 June 2012. [Google Scholar]
- Li, C.; Guo, J.; Guo, C. Emerging from water: Underwater image color correction based on weakly supervised color transfer. IEEE Signal Proc. Let. 2018, 25, 323–327. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Sun, J.; Tang, X. Single Image Haze Removal Using Dark Channel Prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar]
- Peng, Y.T.; Cosman, P.C. Underwater Image Restoration Based on Image Blurriness and Light Absorption. IEEE Trans. Image Process. 2017, 26, 1579–1594. [Google Scholar] [CrossRef]
- Yu, H.; Li, X.; Lou, Q.; Lei, C.; Liu, Z. Underwater image enhancement based on DCP and depth transmission map. Multimed. Tools Appl. 2020, 79, 27–28. [Google Scholar] [CrossRef]
- Galdran, A.; Pardo, D.; Picon, A.; Alvarez-Gila, A. Automatic Red-Channel underwater image restoration. J. Vis. Commun. Image Represent. 2015, 26, 132–145. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Quo, J.; Pang, Y.; Chen, S.; Jian, W. Single underwater image restoration by blue-green channels dehazing and red channel correction. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016. [Google Scholar]
- Gao, Y.; Li, H.; Wen, S. Restoration and Enhancement of Underwater Images Based on Bright Channel Prior. Math. Probl. Eng. 2016, 2016, 3141478. [Google Scholar] [CrossRef]
- Yang, H.Y.; Chen, P.Y.; Huang, C.C.; Zhuang, Y.Z.; Shiau, Y.H. Low Complexity Underwater Image Enhancement Based on Dark Channel Prior. In Proceedings of the 2011 Second International Conference on Innovations in Bio-Inspired Computing and Applications, Shenzhen, China, 16–18 December 2011. [Google Scholar]
- Peng, Y.T.; Cao, K.; Cosman, P.C. Generalization of the Dark Channel Prior for Single Image Restoration. IEEE Trans. Image Process. 2018, 27, 2856–2868. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Guided image filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 35, 1397–1409. [Google Scholar] [CrossRef]
- Hou, G.; Pan, Z.; Wang, G.; Yang, H.; Duan, J. An efficient nonlocal variational method with application to underwater image restoration. Neurocomputing 2019, 369, 106–121. [Google Scholar] [CrossRef]
- Song, M.; Qu, H.; Zhang, G.; Tao, S.; Jin, G. A Variational Model for Sea Image Enhancement. Remote Sens. 2018, 10, 1313. [Google Scholar] [CrossRef] [Green Version]
- Tan, L.; Liu, W.; Pan, Z. Color image restoration and inpainting via multi-channel total curvature. Appl. Math. Model. 2018, 61, 280–299. [Google Scholar] [CrossRef]
- Liu, J.; Ma, R.; Zeng, X.; Liu, W.; Wang, M.; Chen, H. An efficient non-convex total variation approach for image deblurring and denoising. Appl. Math. Comput. 2021, 397, 259–268. [Google Scholar] [CrossRef]
- Hou, G.; Li, J.; Wang, G.; Pan, Z.; Zhao, X. Applications, Underwater image dehazing and denoising via curvature variation regularization. Multimed. Tools Appl. 2020, 79, 20199–20219. [Google Scholar] [CrossRef]
- Hou, G.; Li, J.; Wang, G.; Yang, H.; Huang, B.; Pan, Z. A novel dark channel prior guided variational framework for underwater image restoration. J. Vis. Commun. Image Represent. 2020, 66, 102732. [Google Scholar] [CrossRef]
- Liao, H.Y.; Fang, L.; Michael, K.N. Selection of regularization parameter in total variation image restoration. J. Opt. Soc. Am. 2009, 26, 2311–2320. [Google Scholar] [CrossRef] [PubMed]
- Langer, A. Automated Parameter Selection for Total Variation Minimization in Image Restoration. J. Math. Imaging Vis. 2016, 57, 239–268. [Google Scholar] [CrossRef] [Green Version]
- Wen, Y.W.; Chan, R.H. Parameter selection for total-variation-based image restoration using discrepancy principle. IEEE Trans. Image Process. 2012, 21, 1770–1781. [Google Scholar] [CrossRef] [Green Version]
- Chen, A.Z.; Huo, X.M.; Wen, Y.W. Adaptive regularization for color image restoration using discrepancy principle. In Proceedings of the 2013 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Kunming, China, 5–8 August 2013. [Google Scholar]
- Ma, T.H.; Huang, T.Z.; Zhao, X.L. New Regularization Models for Image Denoising with a Spatially Dependent Regularization Parameter. Abstr. Appl. Anal. 2013, 2013, 729151. [Google Scholar] [CrossRef]
- Wen, H.; Tian, Y.; Huang, T.; Guo, W. Single underwater image enhancement with a new optical model. In Proceedings of the 2013 IEEE International Symposium on Circuits and Systems (ISCAS), Beijing, China, 19–23 May 2013. [Google Scholar]
- Barros, W.; Nascimento, E.R.; Barbosa, W.V.; Campos, M.F.M. Single-shot underwater image restoration: A visual quality-aware method based on light propagation model. J. Vis. Commun. Image Represent. 2018, 55, 363–373. [Google Scholar] [CrossRef]
- Yang, M.; Sowmya, A.; Wei, Z.; Zheng, B. Offshore Underwater Image Restoration Using Reflection Decomposition Based Transmission Map Estimation. IEEE J. Ocean. Eng. 2020, 45, 521–533. [Google Scholar] [CrossRef]
- Punnathanam, V.; Kotecha, P. Yin-Yang-pair Optimization: A novel lightweight optimization algorithm. Eng. Appl. Artif. Intell. 2016, 54, 62–79. [Google Scholar] [CrossRef]
- Punnathanam, V.; Kotecha, P. Multi-objective optimization of Stirling engine systems using Front-based Yin-Yang-Pair Optimization. Energy Convers. Manag. 2017, 133, 332–348. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.; Zhu, D.; Zeng, F.; Sang, Y.; Jiang, L. Perturbation observer based fractional-order PID control of photovoltaics inverters for solar energy harvesting via Yin-Yang-Pair optimization. Energy Convers. Manag. 2018, 171, 170–187. [Google Scholar] [CrossRef]
- Song, D.; Liu, J.; Yang, J.; Su, M.; Wang, Y.; Yang, X.; Huang, L.; Joo, Y.H. Optimal design of wind turbines on high-altitude sites based on improved Yin-Yang pair optimization. Energy 2020, 193, 497–510. [Google Scholar] [CrossRef]
- Zhao, X.; Jin, T.; Qu, S. Deriving inherent optical properties from background color and underwater image enhancement. Ocean Eng. 2015, 94, 163–172. [Google Scholar] [CrossRef]
- Jiao, Q.; Liu, M.; Li, P.; Dong, L.; Hui, M.; Kong, L.; Zhao, Y. Underwater Image Restoration via Non-Convex Non-Smooth Variation and Thermal Exchange Optimization. J. Mar. Sci. Eng. 2021, 9, 570. [Google Scholar] [CrossRef]
- Chiang, J.Y.; Chen, Y.C. Underwater image enhancement by wavelength compensation and dehazing. IEEE Trans. Image Process. 2012, 21, 1756–1769. [Google Scholar] [CrossRef] [PubMed]
- Song, W.; Wang, Y.; Huang, D.; Tjondronegoro, D. A Rapid Scene Depth Estimation Model Based on Underwater Light Attenuation Prior for Underwater Image Restoration. In Proceedings of the Advances in Multimedia Information Processing—PMC 2018, Hefei, China, 21–22 September 2018. [Google Scholar]
- Yang, M.; Sowmya, A. An Underwater Color Image Quality Evaluation Metric. IEEE Trans. Image Process. 2015, 24, 62–71. [Google Scholar] [CrossRef] [PubMed]
- Mittal, A.; Moorthy, A.K.; Bovik, A.C. No-reference image quality assessment in the spatial domain. IEEE Trans. Image Process. 2012, 21, 4695–4708. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SF | PS | UCIQE | |
|---|---|---|---|
| WCID | 0.065 | 0.075 | 0.416 |
| ARUIR | 0.052 | 0.006 | 0.533 |
| GIF | 0.058 | 0.265 | 0.423 |
| ULAP | 0.049 | 0.062 | 0.046 |
| Ours | 0.073 | 0.018 | 0.572 |
| SF | PS | UCIQE | |
|---|---|---|---|
| WCID | 0.063 | 0.15 | 0.405 |
| ARUIR | 0.057 | 0.005 | 0.489 |
| GIF | 0.051 | 0.074 | 0.361 |
| ULAP | 0.054 | 0.005 | 0.438 |
| Ours | 0.068 | 0.064 | 0.595 |
| SF | PS | UCIQE | |
|---|---|---|---|
| WCID | 0.06 | 0.284 | 0.627 |
| ARUIR | 0.047 | 0.003 | 0.533 |
| GIF | 0.041 | 0.198 | 0.553 |
| ULAP | 0.053 | 0.048 | 0.583 |
| Ours | 0.067 | 0.017 | 0.626 |
| SF | PS | UCIQE | |
|---|---|---|---|
| WCID | 0.061 | 0.142 | 0.583 |
| ARUIR | 0.06 | 0.049 | 0.535 |
| GIF | 0.077 | 0.237 | 0.552 |
| ULAP | 0.125 | 0.234 | 0.562 |
| Ours | 0.173 | 0.084 | 0.65 |
| PSNR | SSIM | |
|---|---|---|
| WCID | 19.34 | 0.814 |
| ARUIR | 21.91 | 0.836 |
| GIF | 21.16 | 0.827 |
| ULAP | 20.47 | 0.833 |
| Ours | 22.74 | 0.849 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, K.; Cheng, Y.; Li, L.; Zhang, K.; Liu, Y.; Liu, Y. Underwater Image Restoration via DCP and Yin–Yang Pair Optimization. J. Mar. Sci. Eng. 2022, 10, 360. https://doi.org/10.3390/jmse10030360
Yu K, Cheng Y, Li L, Zhang K, Liu Y, Liu Y. Underwater Image Restoration via DCP and Yin–Yang Pair Optimization. Journal of Marine Science and Engineering. 2022; 10(3):360. https://doi.org/10.3390/jmse10030360
Chicago/Turabian StyleYu, Kun, Yufeng Cheng, Longfei Li, Kaihua Zhang, Yanlei Liu, and Yufang Liu. 2022. "Underwater Image Restoration via DCP and Yin–Yang Pair Optimization" Journal of Marine Science and Engineering 10, no. 3: 360. https://doi.org/10.3390/jmse10030360