1. Introduction
Nowadays, the demand for global energy keeps increasing due to world economic growth. Despite more use of renewable energy, the supply of oil and gas is still important. In particular, offshore platforms continue to produce a good portion of the entire oil and gas. For safety and prevention of spills, the structural integrity of production riser (elastic pipeline to transfer oil and gas from well to platform) and mooring system is considered to be highly important [
1,
2,
3]. Thus, many researchers try to develop a robust approach for monitoring risers by using sensors and ROVs (remotely operated vehicles) [
4].
The ROV method is only intermittent and very expensive compared to the sensor-based method. The sensor-based method can be real-time monitoring if sensor signals can be obtained in real time [
5]. Additionally, if the riser profile can be traced, accumulated fatigue damage can be assessed simultaneously, which is very important for the life extension of the system.
Based on this background, researchers have paid more attention to sensor-based monitoring methods. For example, Ziegler and Muskulus [
6] investigated sensor-based monitoring approaches using accelerometer, inclinometer, and strain gauges. Additionally, Karayaka et al. [
7] researched localized-strain and dynamic-response measurements. The sensor-measurement strategies in the scaled model tests of floating wind turbines and wave energy converters were investigated by O’Donnell et al. [
8]. While Li et al. [
9] developed an acoustic telemetry scheme for the estimation of riser accumulated fatigue by VIV (vortex-induced vibration). Additionally, McNeill et al. [
10] introduced the use of combining acceleration and angular information to the decision-making process for quasi-static angles along the riser. A new technology based on optical fiber sensors with wire to transmit measured strain data was proposed by Morikawa et al. [
11]. Additionally, Peng and Zhi [
12] demonstrated the strengths and weaknesses of various structure health monitoring methodologies including sensing technology. Kim et al. [
13] used numerical simulations with numerical sensors and OMA (operational modal analysis) for the structural health monitoring of floating wind turbines. Additionally, Chung et al. [
14], Chung et al. [
15], Chung et al. [
16], Kim et al. [
17], and Kwon et al. [
18] developed several methods to trace the real-time profile, tension, and bending moment of riser/tendon by using a series of numerical bi-axial inclinometers or accelerometers [
19] along the line. Furthermore, allowable tendon stress under stochastic excitation was studied [
20]. Continuously, the ultrasonic approach using voltages, time, and various other factors was also adapted to structural health monitoring [
21,
22,
23,
24,
25]. As a new approach, the magnetic flux leakage method, which can only detect damage, was emerged recently [
26,
27].
The real-time power/data transmission to/from the deep portion of a riser without electric/optical wire can be challenging. In this case, acoustic data transmission can be employed [
9]. Jahangiri et al. [
28] evaluated the power-supplying method using piezoelectric energy converters for subsea sensors. Optical signals [
4,
29] can be used for data transmission if distance and water visibility are acceptable. The easiest and cheapest method is data transmission through electrical/optical wire in real time if sensors are located close to the water surface. In this case, a continuous power supply can also be easily achieved. Then, a question may arise: “can we use only a couple of sensors near the free surface and still trace/monitor the behavior of the remaining deep portion of riser?”. If this is possible, it can be the cheapest and simplest riser monitoring method, especially in deep water. This paper addresses this issue.
To meet the objective, one approach is based on using machine learning (ML) algorithms with a minimum number of sensors [
18,
30]. Alternatively, a hybrid method using a dual algorithm (DA) based finite element (FE) simulator with a couple of physical sensors can be employed, which is addressed in this paper. The basic assumption of the DA approach is that the FE riser simulator is good enough to reliably represent the actual riser behavior [
31,
32]. The developed method can also be straightforwardly applied to mooring lines, umbilical, power lines, and any other elastic lines.
In this regard, a real-time riser structural health monitoring method based on the DA approach using a minimum number of inclinometers (attached to the top portion of riser) is investigated. First, a general theory for the riser tracing algorithm and FE simulator is briefly explained. Then, the applied DA model with numerical inclinometer signals is described. To validate the developed methodology, an FPSO (floating production storage offloading) system at 1000 m water depth with SCR (steel catenary riser) or SLWR (steel lazy-wave riser) is modeled, and the developed algorithms are applied for 1-year and 100-year storm conditions. Then, the estimated and actual riser dynamic behaviors are compared. A simpler method, forced top oscillation (FTO), using only the movements of the riser top point, is also introduced and compared with the presently proposed method.
Again, the objective of this paper is to introduce a novel approach to monitor the behavior of riser and its stress with several sensors near free surface using the DA hybrid method. The contents of this study are as follows. Through
Section 2 and
Section 3, DA (node displacements tracing using quadratic interpolation function and 3D curve length equation and tension and bending-moment estimation) are more explained. Continuously, in
Section 4, the DA hybrid method for riser structural health monitoring using the fewest sensors is explained in detail. Additionally, the numerical setup for the target structure (FPSO with SCR and SLWR at 1000 m water depth) and environmental conditions (1 yr-normal operating and 100 yr-extreme storm conditions) are summarized in
Section 5.
Section 6 presents structure health monitoring results and discussions. Finally, conclusions and future work are presented in
Section 7 and
Section 8. Again, this paper presents an innovative structure health monitoring methodology based on the suggested dual use of node displacement/tension tracing algorithm and FE simulator.
2. Riser Profile Tracing Algorithm
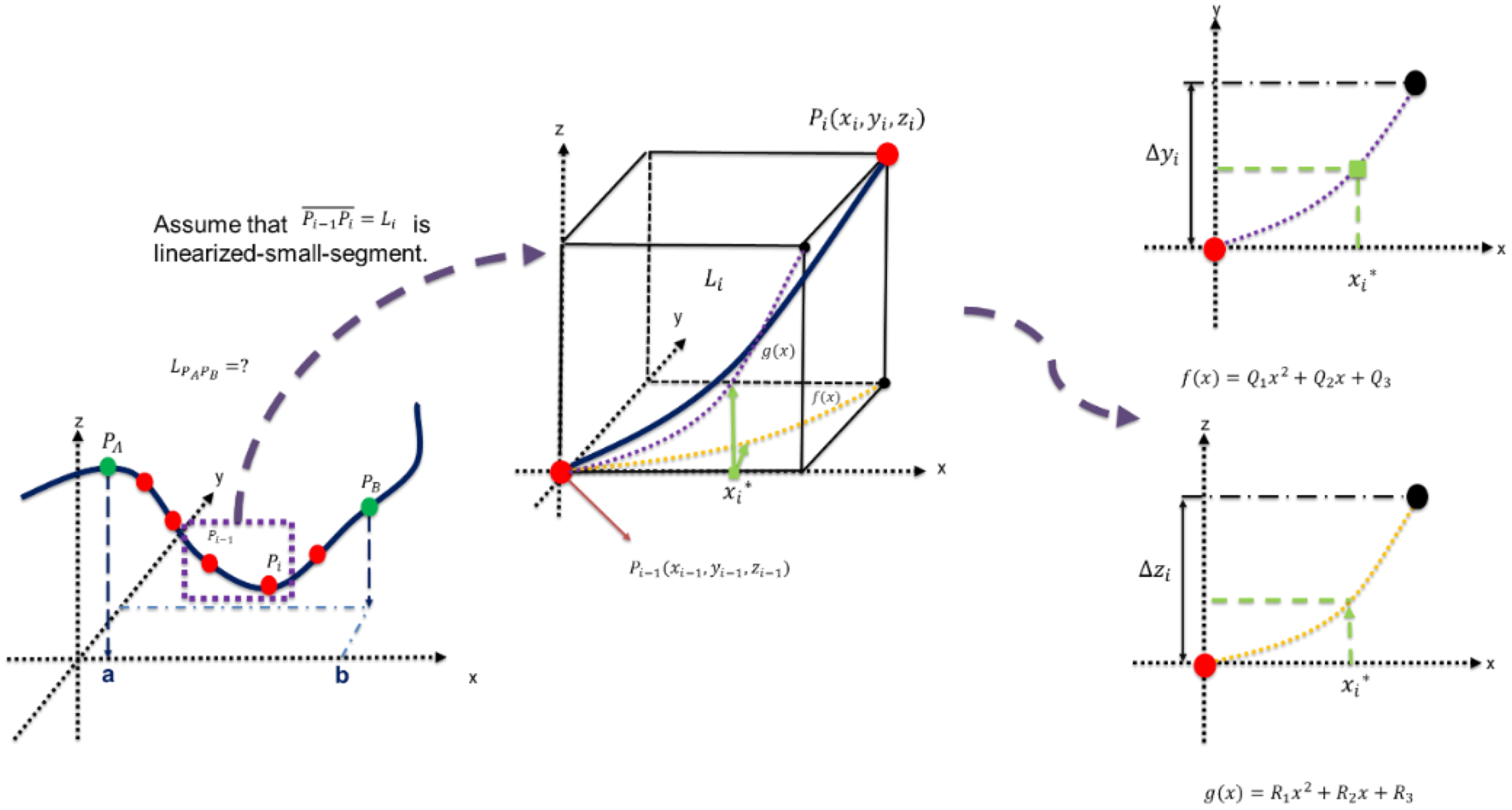
First, to trace the riser profile up to the target point to subsequently run the FE simulator, the riser-profile-tracing algorithm needs to be developed. The given information is the moving top point and values measured by angle sensors at the respective sensor locations. Still, another information has to be used, which is the curved line length in 3D space between the sensor points. This is explained in the following with
Figure 1.
Here, the entire curved line length in 3D space (
) between the two sensor endpoints can be calculated by the summation of numerous small-segment (
) lengths:
By using the decomposed quadratic interpolation functions for y and z locations (f(x), g(x)) in the x-y and x-z planes (
Figure 2) and mean value theorem (Equation (3)), the small segment length equation (Equation (2)) can be re-written as (Equation (4)):
where
,
where
.
Next, the small segment length equation (Equation (2)) can be re-expressed using the following relations:
Q
1, Q
2, R
1, R
2 are arbitrary coefficients
where
Finally, the entire curved line length in 3D space (
) can be re-arranged as follows:
where
.
Equation (7) can be integrated analytically as below (Equation (8)):
The analytic 3D-line-length equation will be used as the final requisite equation to solve for the instantaneous riser node displacements sequentially from top to bottom. Furthermore, it is assumed that the axial elongation of riser by line tension is infinitesimally small, so this effect can be neglected in the algorithm.
In
Table 1, unknowns and boundary conditions are summarized. There are 8 boundary conditions and 9 unknowns. The 9 unknowns are 6 coefficients
and the coordinates (
) of the endpoint. If we choose the starting point as (0, 0, 0), then
and
. The remaining 7 unknowns have to be solved by the 4 angle conditions and 2 polynomial equations. Therefore, one more equation is needed to solve the problem. The coordinates of the starting point are known. For example, the hang-off point (contact location between floater and riser) can be traced using GPS system. Then, the coordinates of the endpoint can be found from the above equations. For that, only the angles measured by bi-axial inclinometers at two endpoints are necessary. Once the x-y-z coordinates of the endpoint are found, it is used as the starting point for the next segments. This way, as long as angle sensors are distributed along the entire riser, their locations can be traced sequentially from the top to the last sensor point. In the present paper, it is assumed that three bi-axial inclinometers are attached along the top part of riser with an equal interval of 100 m. Then, the coefficients (
can be obtained by applying the known coordinates of the starting point (hang-off top point). Then, the next coefficients (
) can be estimated from the given angles at the starting point. With the given angles at endpoint B, the remaining coefficients (
) can be expressed in terms of
, which is still unknown at this point. Thus, to find the coefficients (
),
should be obtained using the equation for the curved line length in 3D space (Equation (8)), which was derived above.
where
The integral range is from 0 to
. Then, since sensor interval (=
) is known value, Equation (9) can be re-written as below (Equation (10)):
This equation cannot be solved explicitly for
. Instead, the iterative method can be used with an initial value obtained from a simpler expression assuming x-z planar motion only [
16]. By applying the iteration method,
in Equation (10) can be determined within the given tolerance. Then, the final coefficients (
) in the interpolation functions can be obtained so that
and
can also be determined, i.e., the other displacements (
) of the bottom point of the top element can be obtained by using the interpolation functions (
,
). Then, the same procedure can be applied to the next element, and the process can be sequentially continued up to the last sensor point (= target point in the present study).
3. Tension and Bending-Moment Estimation Algorithm
Tension information at the target location is also needed as another input for the DA approach. The top tension is measured in real-time by a tension meter at the floater-riser interface [
15]. Then, as shown in Equation (11), the corresponding tension distribution along the line can be calculated. The tension difference between the top and bottom ends can be estimated by subtracting the beam effective weight of the segment from the top tension including the effect of pressure differences (
Figure 3).
where
Here, the dynamic variation of tension at a segment is governed by the variation of top tension, line slope, and effective weight (Equation (12)).
where
The above algorithm for tension tracing can reliably be used when the riser shape is a small angle (within 10 degrees) from the vertical axis, as is the case of the riser upper portion [
33].
Next, let us consider the analytical solution for the riser bending moment using only a series of bi-axial inclinometers. As shown in
Figure 4, by employing the cubic interpolation (shape) function (Equation (13)) for each segment and beam bending stress formula (Equation (14)) with respect to the generalized s-coordinate system, the beam bending moment formula can be derived as Equation (15). Here, at the mid-point (
) of a segment, the beam bending moment formula can be simplified (Equation (16)). Since directional cosine angles (
) are given, the discretized bending moment formula at mid-length along the riser can be estimated accordingly. Alternatively, after all nodal displacements are traced, as in the above, the bending moment at any point within each segment can also be obtained by differentiating the cubic shape function twice. More detailed descriptions and validation results are presented in Refs. [
14,
15].
4. Dual-Algorithm Approach for Riser Structural-Health Monitoring
In this section, the overview of the DA approach (tracing algorithm and FE simulator) for riser structure health monitoring with minimum sensors is presented, as shown in
Figure 5. The new approach is called the DA hybrid method since both the displacement tracing algorithm based on sensor signals and the FE simulator are simultaneously used. First, it is assumed that the sensor signals attached along the top part of a riser can be acquired in real-time. Since sensors (bi-axial inclinometers) are located only at the top part of riser (close to the free surface relatively), electric/optical wire can directly be connected between the floater and sensor so that it can provide power and data transmission and will be free from battery replacement. Next, the measured angle-sensor data can be used to trace node displacements and tension up to the target point (same location as the last sensor attached) by using an algorithm. Furthermore, with the assumption that wave actions are sufficiently reduced at the sufficiently submerged riser target point, the FE simulator can be applied with the given target node displacements and tension without any wave effects. For example, in deep water, 200 m submergence depth of the target point is enough to neglect all wave effects of wavelength up to 400 m (wave period = 16 s). However, depending on specific site conditions, there may be nontrivial current below that point, which can be inversely estimated in real time by using the implemented angle sensors and relevant ML approach. The details are given in Ref. [
34]. In this paper, it is assumed that the current velocity below the target point is given by applying a typical power law (Equation (17)). Then, finally, an FE riser simulator can be employed and run by inputting the estimated target-point movement and tension in the presence of current if any. In summary, (i) the riser top point can be traced by GPS (Global Positioning System), (ii) riser top tension can be measured by a tension meter there, (iii) the signals of a couple of angle sensors can be received in real time, (iv) then the riser-profile-tracing algorithm is applied to get the movement and tension of target point, (v) FE simulator is run with the given target-point inputs (movement and tension) to reproduce the dynamic behavior of the entire riser below that target point, (vi) then, all motions and stresses of the entire riser can be obtained, and the real-time accumulated fatigue damage can also be assessed. In the above DA method, the basic condition is that the FE riser simulator can reliably reproduce the actual physical riser behavior for any given top forced oscillations.
Alternatively, we can introduce a much simpler approach (called forced top oscillation (FTO) approach), for which only the movement at the riser top point is directly applied to the FE simulator without using any angle-sensor signals and tracing algorithm. In this case, the dynamics of the top portion of riser are to be significantly influenced by wave action, so a real-time incident wave profile should be included in the FE simulator. Without including the wave effects, the accuracy of tracing the real-time riser profiles and stresses has to be diminished. To clarify this, we will compare the performance of the proposed DA method with that of the simpler approach against the actual behavior of riser.
5. Explanation for Target Structure
As a floater in this study, the default spread-moored FPSO given by OrcaFlex was selected with the corresponding added mass, radiation damping, and first- and second-order wave loads accordingly [
16]. A total of 12 mooring lines (with four groups) are employed for the station-keeping in 1000 m water depth. Each mooring line consists of a chain–polyester rope–chain combination. Additionally, as shown in
Figure 6, it is assumed that only three inclinometers are attached along the top part of riser at 100 m intervals (entire riser arc length = 1500 m). Detailed mooring system and riser material properties are summarized in
Table 2.
In the following, as shown in
Figure 6, the FPSO with SCR or SLWR at 1000 m water depth is modeled. Since the region near the touch-down point (TDP) in SCR or lazy wave zone in SLWR can be a critical point during the operation, three locations near the critical region and one additional point near mid-length are selected for performance comparison. At those points, the estimated real-time node displacements, bending moments, and tensions are systematically compared with the actual values.
Both in the DA approach and simpler FTO approach, floater motions primarily drive riser dynamics. On the other hand, the floater motions are driven by winds, waves, and currents. In the DA approach, however, only current information below the target point is necessary, if any, as shown in
Figure 7 since wave actions are to be sufficiently attenuated there. The environmental loading conditions for each method are tabulated in
Table 3. In both approaches, it is assumed that the riser-top-point displacements can be traced directly by GPS and floater 6 DOF (degrees of freedom) motion sensor.
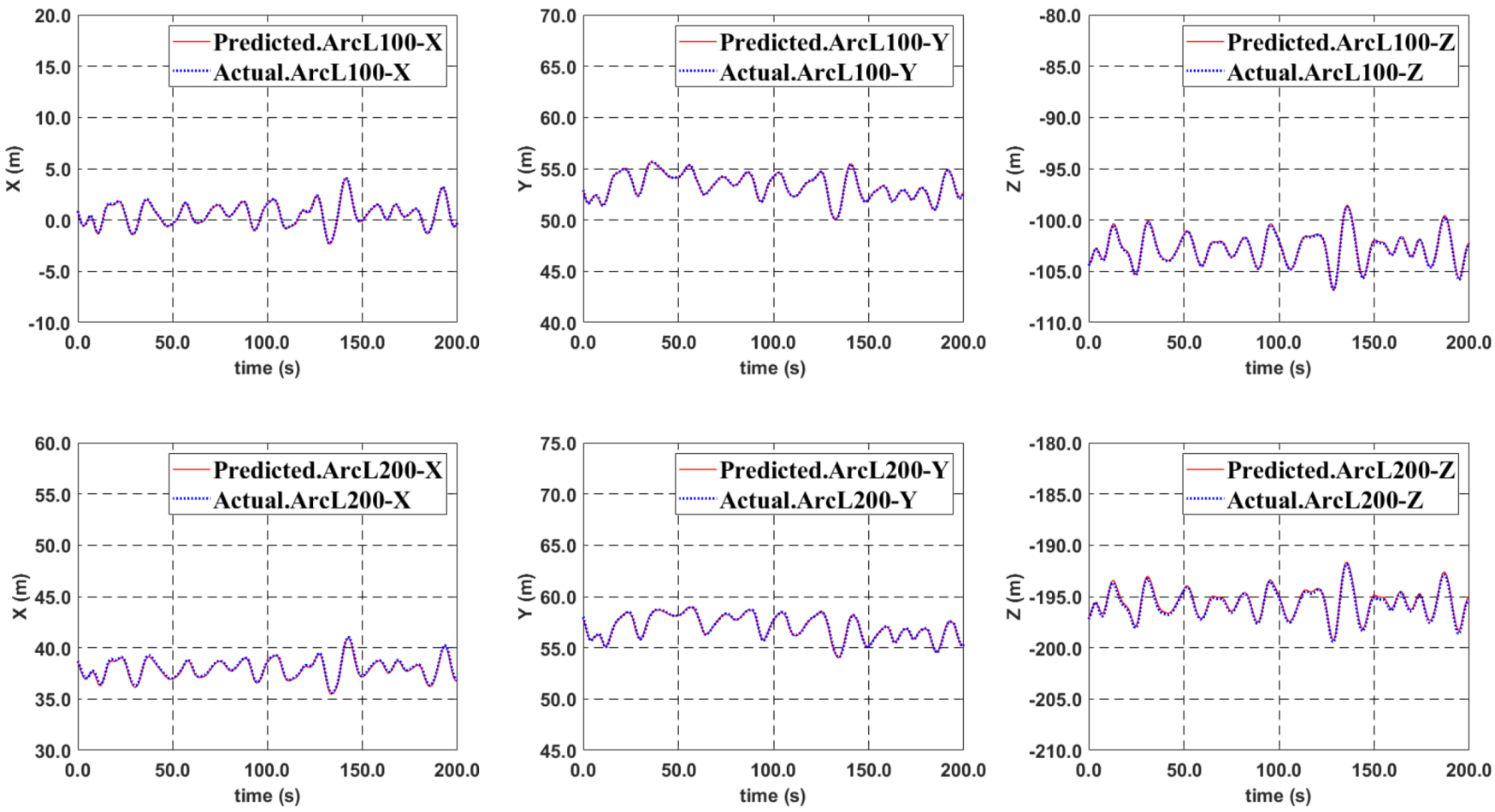
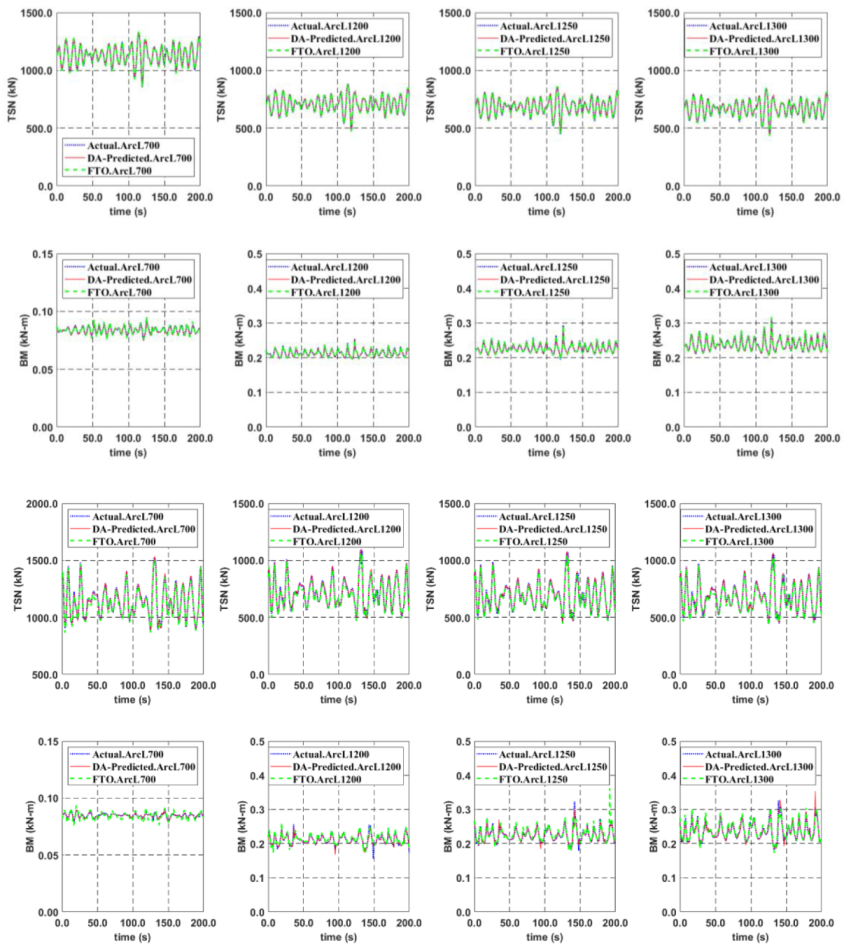
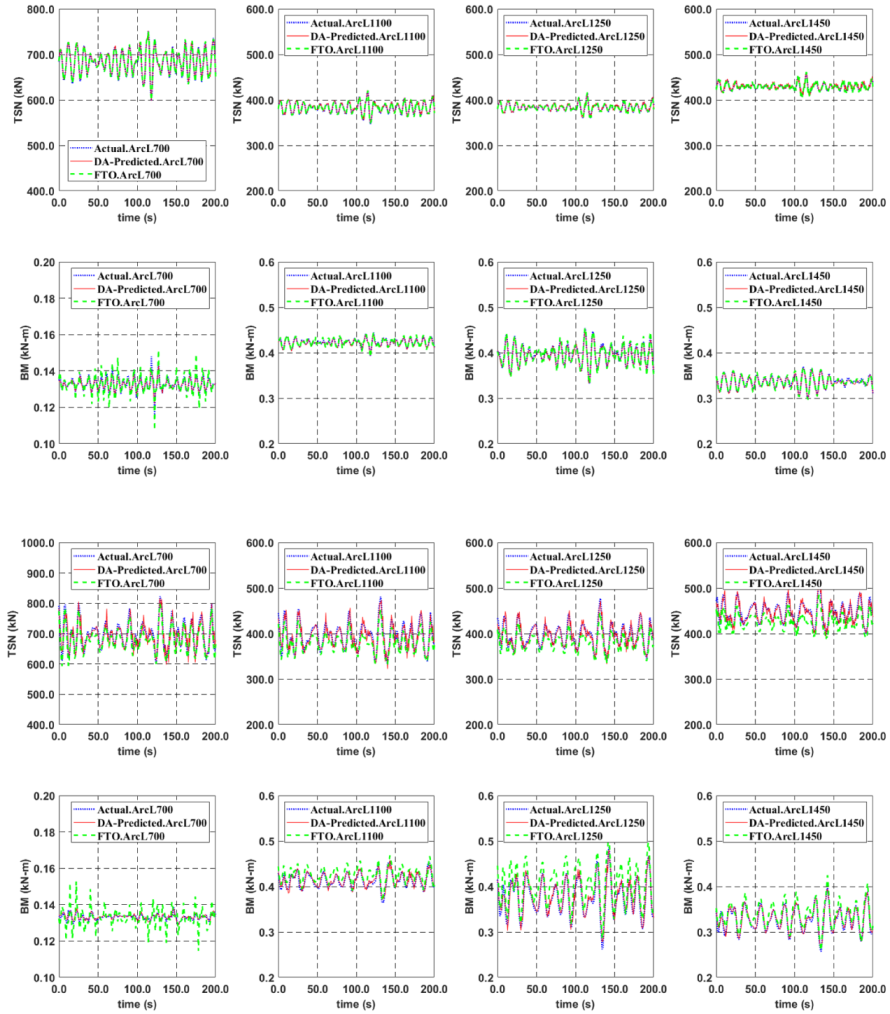
In the above section, the riser tracing algorithm using angle sensors was explained. As a FE simulator for line dynamics, we used a commercial program OrcaFlex. In this section, numerical results for two different approaches, the proposed DA method and the simpler FTO method, will be presented, and they will be compared with the actual values. The predicted node displacements, tensions, and bending moments at various riser locations will be compared with the corresponding actual values. As for environmental conditions, 1-yr and 100-yr storms with noncollinear wind-wave-current are considered as summarized in
Table 4. The wave, current, and wind headings are 45 deg, 90 deg, and 60 deg, respectively. This noncollinear environment is intentionally employed to trigger 3D riser dynamics. According to Equation (17), the current profile was inputted with given surface velocity (
Figure 8). As an example floating system, OrcaFlex default FPSO with mooring (SPM) system is selected [
32]. The FPSO dimension and specifications are tabulated in
Table 5. Additionally, the mooring and riser coordinates and their arrangement are presented in
Table 6 and
Figure 9. The FPSO motions under 1-year and 100-year storms are plotted in
Figure 10. The corresponding results for both SCR and SLWR are presented in the following.
7. Conclusions
In this paper, a novel and cost-effective riser structural health monitoring methodology with a minimal number of sensors on the top portion of riser was developed to overcome various problems (power supply and data acquisition) associated with sensors (bi-axial inclinometers) at the deep portion of riser. The new approach was called the DA (dual algorithm) hybrid method since both the displacement tracing algorithm based on sensor signals and the FE simulator are simultaneously used. The displacement tracing algorithm traced the node displacement and tension up to the last sensor position, called the target point. Then, the inputted movement and tension of the target point were used for the FE simulator to obtain displacement, tension, and bending stress below the target point. This way, the real-time tracing of stresses along the entire riser can be reproduced.
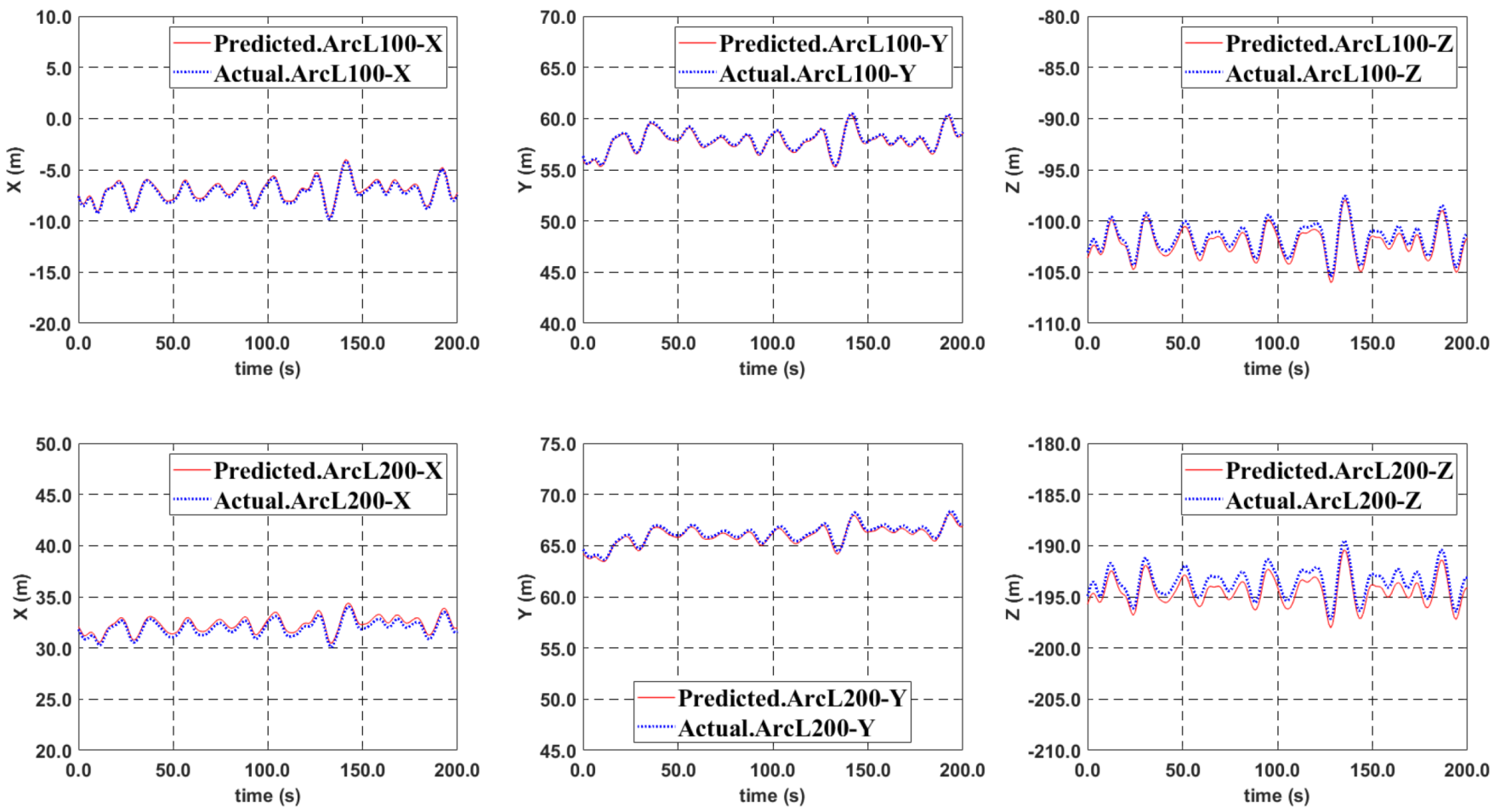
The developed DA-based hybrid method was validated by comparing the actually simulated riser dynamic behaviors with the reconstructed values by using the developed method. For that, a spread-moored FPSO system at 1000 m water depth with SCR or SLWR was employed with the assumption that angle sensors are positioned at the riser top portion, i.e., 0 m, 100 m, and 200 m arc lengths. Noncollinear wind-wave-current conditions representing 1-yr and 100-yr storms were used. It is confirmed that the developed DA method can reliably trace the real-time displacements, tensions, and bending stresses along the entire length of the riser.
As a simpler approach, forced top oscillation (FTO), which only uses riser top movement for running the FE simulator, was also introduced, and its performance was compared with that of DA. It was seen that the simpler method (FTO) could not accurately reproduce the dynamics of the upper portion of riser since real-time wave actions were ignored. Finally, it was also shown that the developed DA method was relatively robust against other kinds of lighter and more flexible lines, such as umbilical. Since the developed approach is generic regardless of line shape or material, it can also be applied to the real-time monitoring of flexible riser, mooring, and power cable.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





















