


Defense Strategy against False Data Injection Attacks in Ship DC Microgrids


Abstract
:1. Introduction
2. Anti-FDIA Model of the Ship DC Microgrid
2.1. Basic Features of an ANN
2.2. FDIA to DC Secondary Control
2.3. Detection and Mitigation Strategy
3. Case Study and Discussion
3.1. Case Study 1: Slow Load Change
3.2. Case Study 2: Sudden Load Increase and Decrease
3.3. Case Study 3: Plug-and-Play of Additional Units
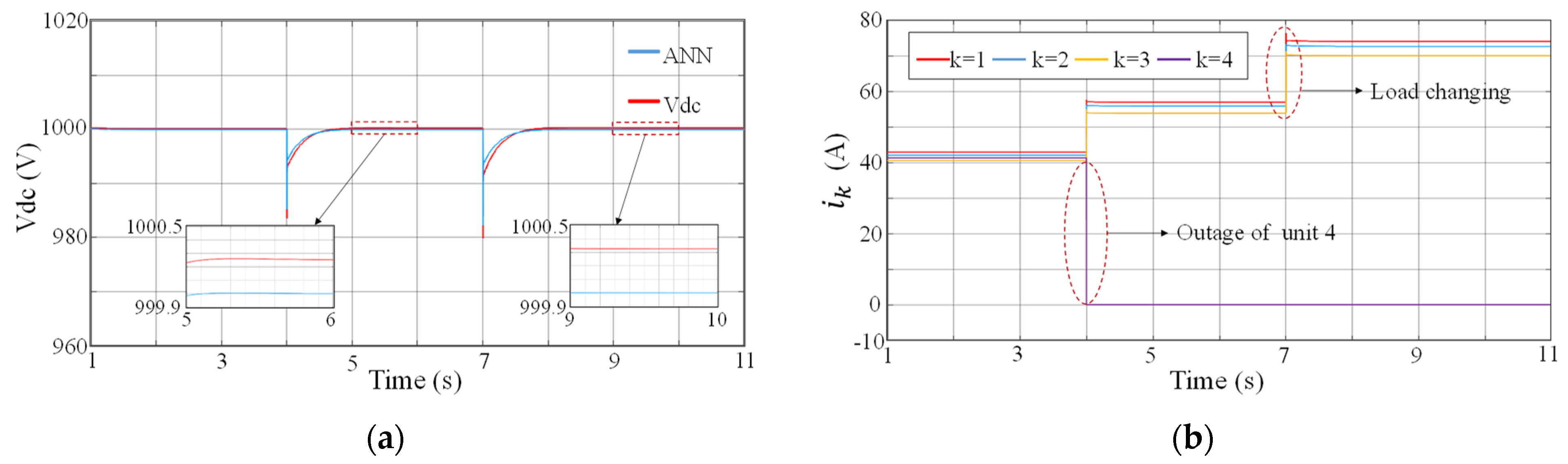
3.4. Case Study 4: Complex Situations
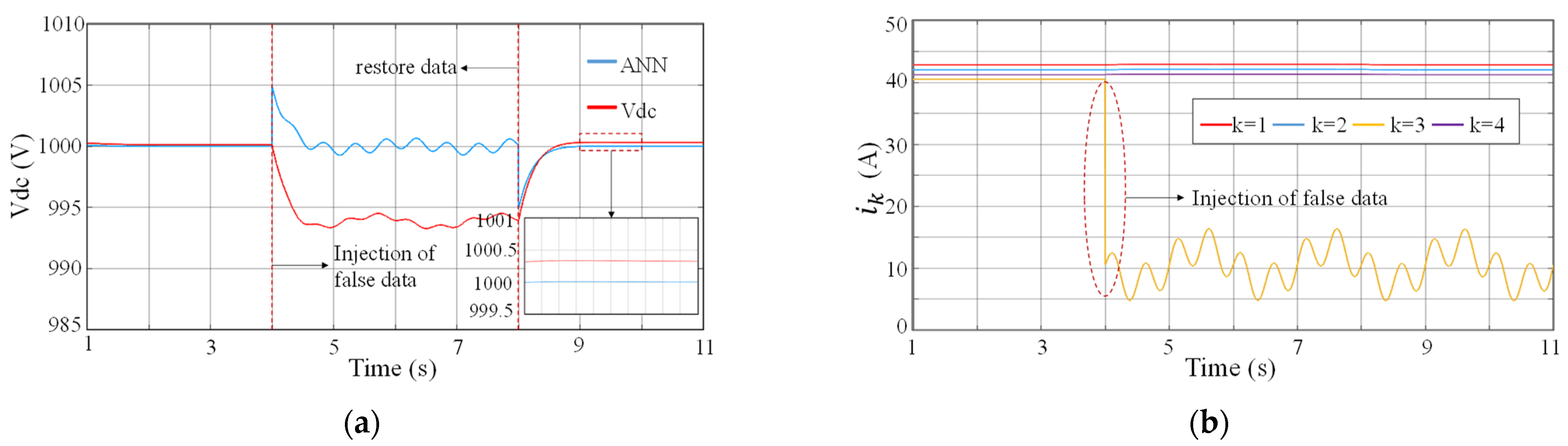
3.5. Case Study 5: Artificial Neural Network Is Attacked by FDIA
3.6. Case Study 6: Data Recovery
4. The Summary of the Case Studies
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| FDIA | False Data Injection Attacks |
| DC | Direct Current |
| ANN | Artificial Neural Network |
| AC | Alternating Current |
| SCADA | Supervisory control and data acquisition |
| MITM | Man-In-The-Middle attack |
| DoS | Denial of Service |
| MAS | Multiagent system |
| CPS | Cyber-physical system |
| STL | Signal Temporal Logic |
| RNN | Recurrent Neural Network |
| DER | Distributed energy resources |
| Weight matrix of the hidden layer of the ANN | |
| Bias vector of the ANN | |
| The reference DC bus voltage | |
| DC bus voltage | |
| The ANN’s estimate of the DC bus voltage |
References
- Qiang, S.; Chen, Q. Hierarchical control of direct current microgrid on ship. Science Technol. Eng. 2020, 20, 10979–10988. [Google Scholar]
- Xu, L.; Guerrero, J.M.; Lashab, A.; Wei, B.; Bazmohammadi, N.; Vasquez, J.C.; Abusorrah, A. A Review of DC Shipboard Microgrids Part II: Control Architectures, Stability Analysis and Protection Schemes. IEEE Trans. Power Electron. 2022, 37, 4105–4120. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2010, 58, 158–172. [Google Scholar] [CrossRef]
- Kushal, T.R.B.; Lai, K.; Illindala, M.S. Risk-based mitigation of load curtailment cyber attack using intelligent agents in a shipboard power system. IEEE Trans. Smart Grid 2018, 10, 4741–4750. [Google Scholar] [CrossRef]
- Liu, Y.; Ning, P.; Reiter, M.K. False data injection attacks against state estimation in electric power grids. ACM Trans. Inf. Syst. Secur. (TISSEC) 2011, 14, 1–33. [Google Scholar] [CrossRef]
- Sahoo, S.; Peng, J.C.H.; Mishra, S.; Dragičević, T. Distributed screening of hijacking attacks in DC microgrids. IEEE Trans. Power Electron. 2019, 35, 7574–7582. [Google Scholar] [CrossRef]
- Hussain, B.; Du, Q.; Sun, B.; Han, Z. Deep learning-based DDoS-attack detection for cyber–physical system over 5G network. IEEE Trans. Ind. Inform. 2021, 17, 860–870. [Google Scholar] [CrossRef]
- Bolbot, V.; Theotokatos, G.; Bujorianu, L.M.; Boulougouris, E.; Vassalos, D. Vulnerabilities and safety assurance methods in Cyber-Physical Systems: A comprehensive review. Reliab. Eng. Syst. Saf. 2019, 182, 179–193. [Google Scholar] [CrossRef] [Green Version]
- Beg, O.A.; Johnson, T.T.; Davoudi, A. Detection of false-data injection attacks in cyber-physical DC microgrids. IEEE Trans. Ind. Inform. 2017, 13, 2693–2703. [Google Scholar] [CrossRef]
- Beg, O.A.; Nguyen, L.V.; Johnson, T.T.; Davoudi, A. Signal temporal logic-based attack detection in DC microgrids. IEEE Trans. Smart Grid 2019, 10, 3585–3595. [Google Scholar] [CrossRef]
- Habibi, M.R.; Baghaee, H.R.; Dragičević, T.; Blaabjerg, F. Detection of false data injection cyber-attacks in DC microgrids based on recurrent neural networks. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 5294–5310. [Google Scholar] [CrossRef]
- Sahoo, S.; Peng, J.C.H.; Devakumar, A.; Mishra, S.; Dragičević, T. On detection of false data in cooperative DC microgrids—A discordant element approach. IEEE Trans. Ind. Electron. 2019, 67, 6562–6571. [Google Scholar] [CrossRef]
- Habibi, M.R.; Dragicevic, T.; Blaabjerg, F. Secure control of dc microgrids under cyber-attacks based on recurrent neural networks. In Proceedings of the 2020 IEEE 11th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Dubrovnik, Croatia, 28 September 2020–1 October 2020; pp. 517–521. [Google Scholar]
- Habibi, M.R.; Baghaee, H.R.; Dragičević, T.; Blaabjerg, F. False data injection cyber-attacks mitigation in parallel DC/DC converters based on artificial neural networks. IEEE Trans. Circuits Syst. II Express Briefs 2020, 68, 717–721. [Google Scholar]
- Habibi, M.R.; Sahoo, S.; Rivera, S.; Dragičević, T.; Blaabjerg, F. Decentralized coordinated cyberattack detection and mitigation strategy in DC microgrids based on artificial neural networks. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 4629–4638. [Google Scholar] [CrossRef]
- Habibi, M.R.; Baghaee, H.R.; Blaabjerg, F.; Dragičević, T. Secure Control of DC Microgrids for Instant Detection and Mitigation of Cyber-Attacks Based on Artificial Intelligence. IEEE Syst. J. 2021, 16, 2580–2591. [Google Scholar] [CrossRef]
- Jawad, M.; Ali, S.M.; Khan, B.; Mehmood, C.A.; Farid, U.; Ullah, Z.; Usman, S.; Fayyaz, A.; Jadoon, J.; Tareen, N.; et al. Genetic algorithm-based non-linear auto-regressive with exogenous inputs neural network short-term and medium-term uncertainty modelling and prediction for electrical load and wind speed. J. Eng. 2018, 2018, 721–729. [Google Scholar] [CrossRef]
- Dragičević, T.; Novak, M. Weighting factor design in model predictive control of power electronic converters: An artificial neural network approach. IEEE Trans. Ind. Electron. 2018, 66, 8870–8880. [Google Scholar] [CrossRef] [Green Version]
- Ali, Z.; Terriche, Y.; Abbas, S.Z.; Abbas, S.Z.; Hassan, M.A.; Sadiq, M.; Su, C.-L.; Guerrero, J.M. Fault Management in DC Microgrids: A Review of Challenges, Countermeasures, and Future Research Trends. IEEE Access 2021, 9, 128032–128054. [Google Scholar] [CrossRef]
- Mohammadpourfard, M.; Weng, Y.; Genc, I.; Kim, T. An Accurate False Data Injection Attack (FDIA) Detection in Renewable-Rich Power Grids. In Proceedings of the 2022 10th Workshop on Modelling and Simulation of Cyber-Physical Energy Systems (MSCPES), Milan, Italy, 3 May 2022; pp. 1–5. [Google Scholar]
- Baghaee, H.R.; Mirsalim, M.; Gharehpetian, G.B. Power calculation using RBF neural networks to improve power sharing of hierarchical control scheme in multi-DER microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1217–1225. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case Study Number | Planed Scenario | Number of Units |
|---|---|---|
| 1 | slow load change | 4 |
| 2 | sudden load increase and decrease | 4 |
| 3 | plug-and-play of additional units | 4 |
| 4 | complex situations | 4 |
| 5 | ANN is attacked by FDIA | 4 |
| 6 | data recovery | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, H.; Zhao, Y.; Wang, T.; Zhang, J. Defense Strategy against False Data Injection Attacks in Ship DC Microgrids. J. Mar. Sci. Eng. 2022, 10, 1930. https://doi.org/10.3390/jmse10121930
Zeng H, Zhao Y, Wang T, Zhang J. Defense Strategy against False Data Injection Attacks in Ship DC Microgrids. Journal of Marine Science and Engineering. 2022; 10(12):1930. https://doi.org/10.3390/jmse10121930
Chicago/Turabian StyleZeng, Hong, Yuanhao Zhao, Tianjian Wang, and Jundong Zhang. 2022. "Defense Strategy against False Data Injection Attacks in Ship DC Microgrids" Journal of Marine Science and Engineering 10, no. 12: 1930. https://doi.org/10.3390/jmse10121930