
Research on the Deep Learning Technology in the Hull Form Optimization Problem

Abstract
:1. Introduction
2. The Establishment of the Ship Hull form Optimization Framework
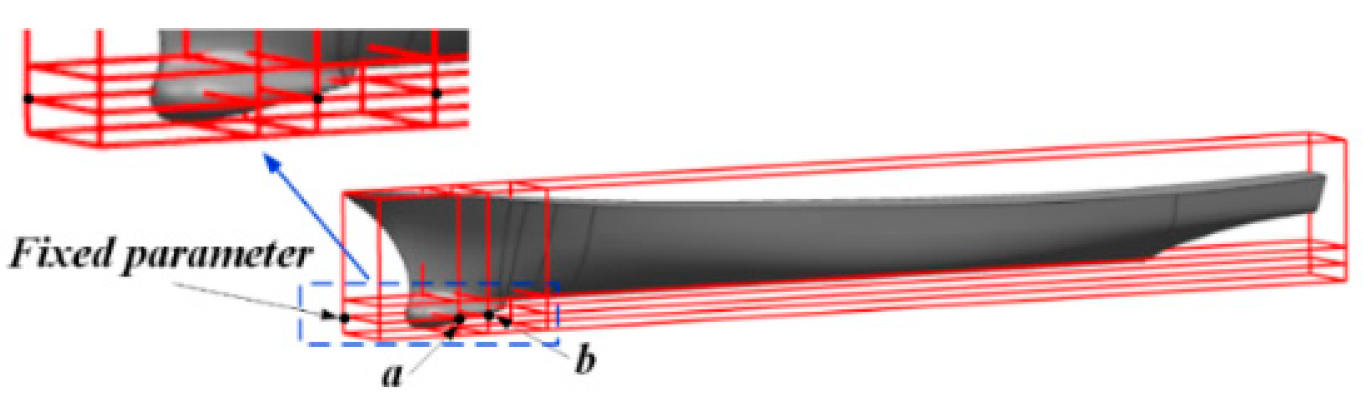
2.1. Define Optimization Problem
2.2. Optimization Flowchart
- The first step is to establish the sample points. The Optimal Latin Hypercube Design (Opt LHD) algorithm is used to obtain a few samples. Then, judge whether the displacement meets the requirements. If the answer is No, change the ship’s draft to meets the constraints. If the answer is Yes, the CFD method is utilized to calculate the total resistance coefficient of modified ship models. Finally, the sample set is applied to train the surrogate model;
- Output several sets of design variables using the PSO algorithm;
- Calculate total resistance coefficient of different modified ship models using the approximate model;
- Change design variables using PSO algorithm, and repeat Steps (2)–(4) until the termination condition is satisfied. Finally, output the optimal solution with minimum total resistance coefficient.
3. Resistance Evaluation Method
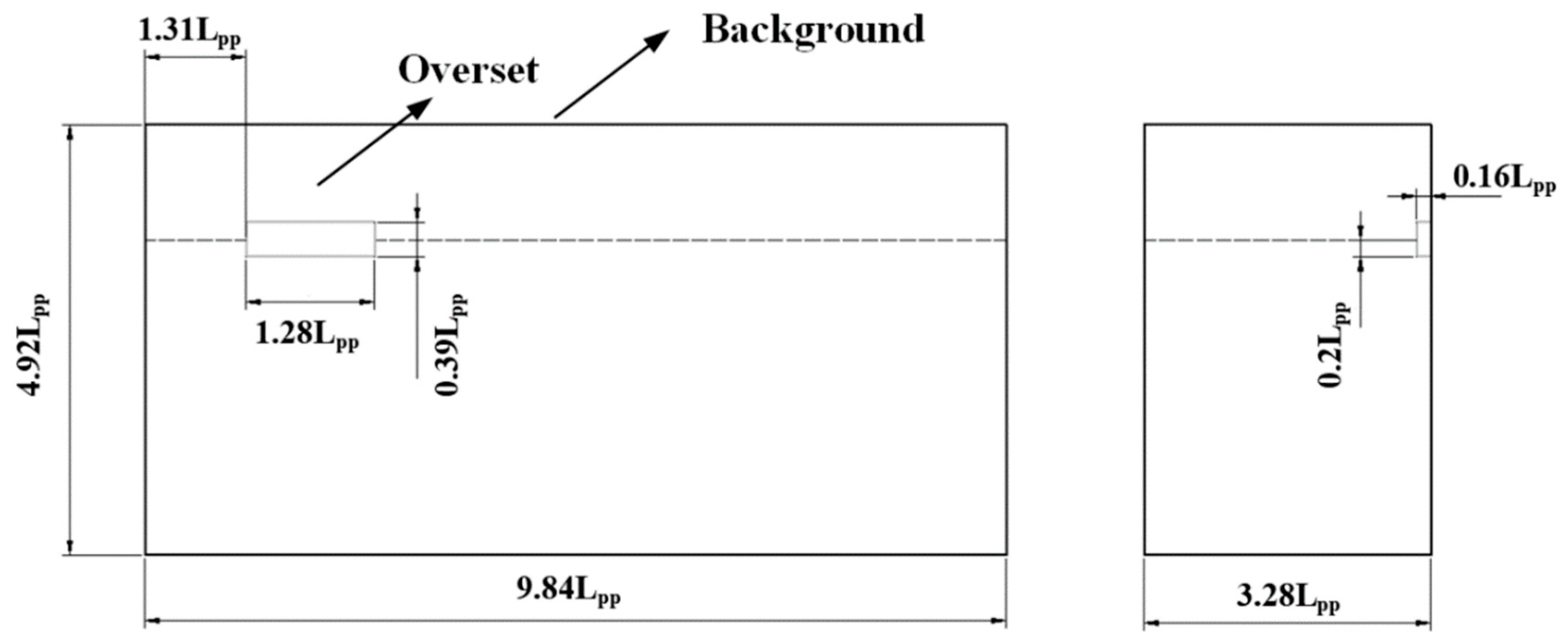
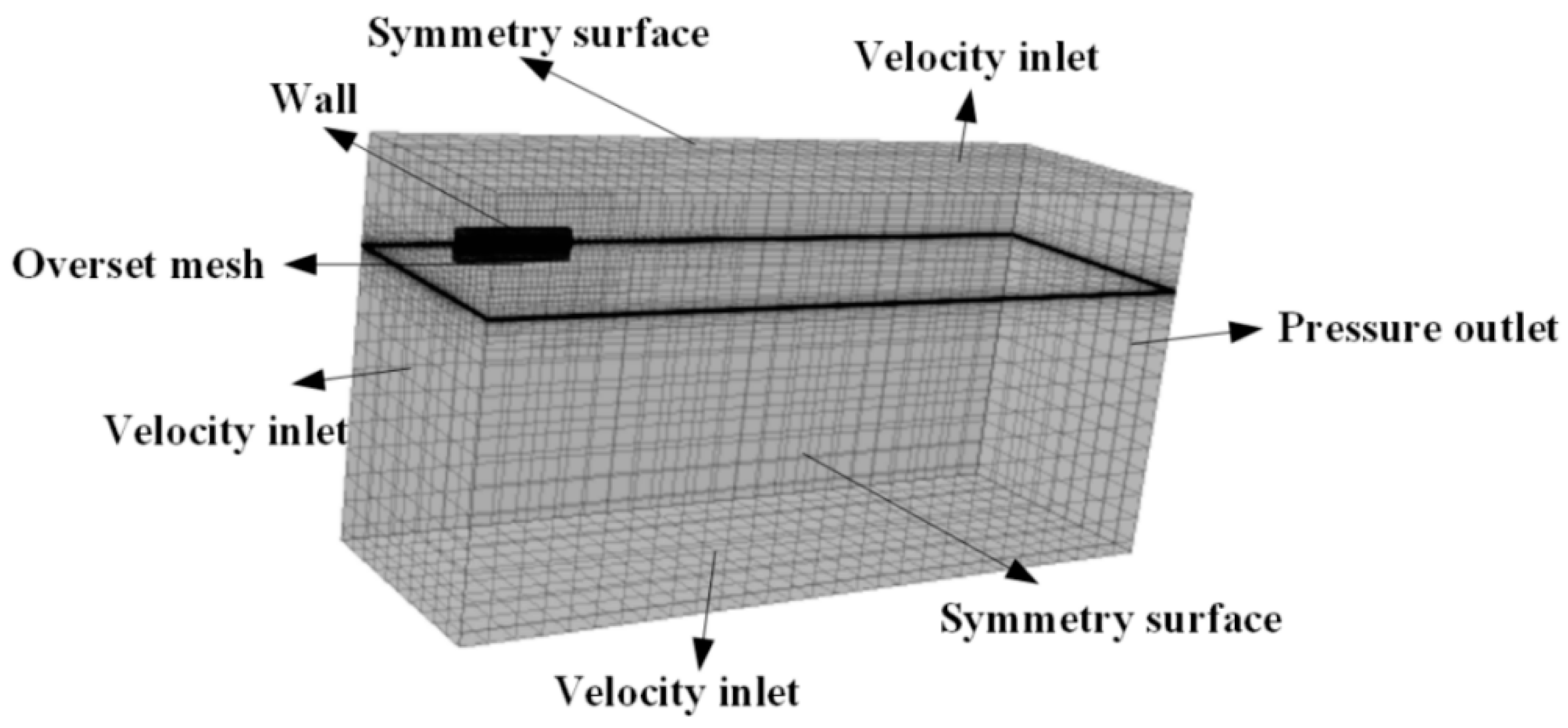
3.1. CFD Methods
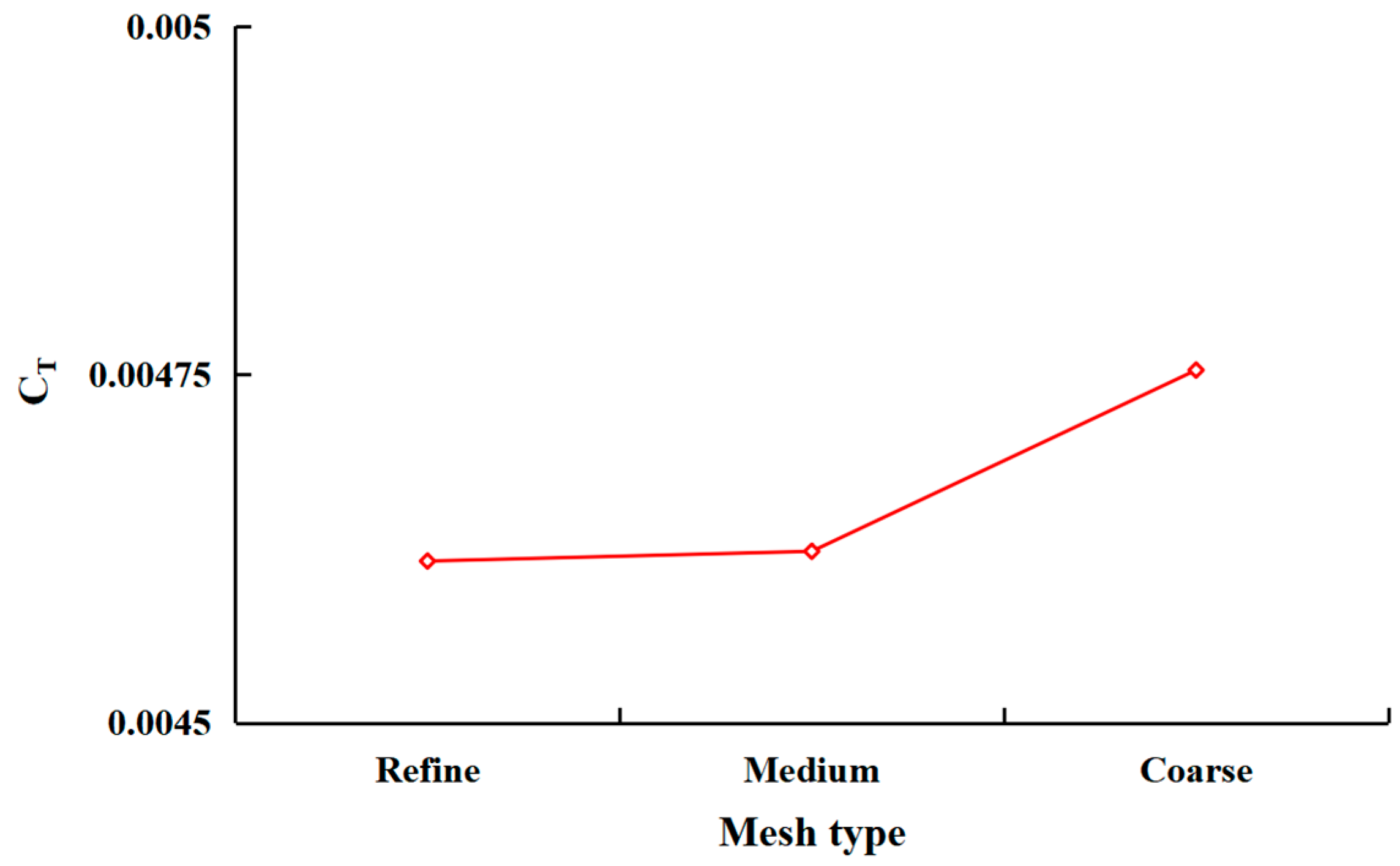
3.1.1. Validation Study for the Mesh Size
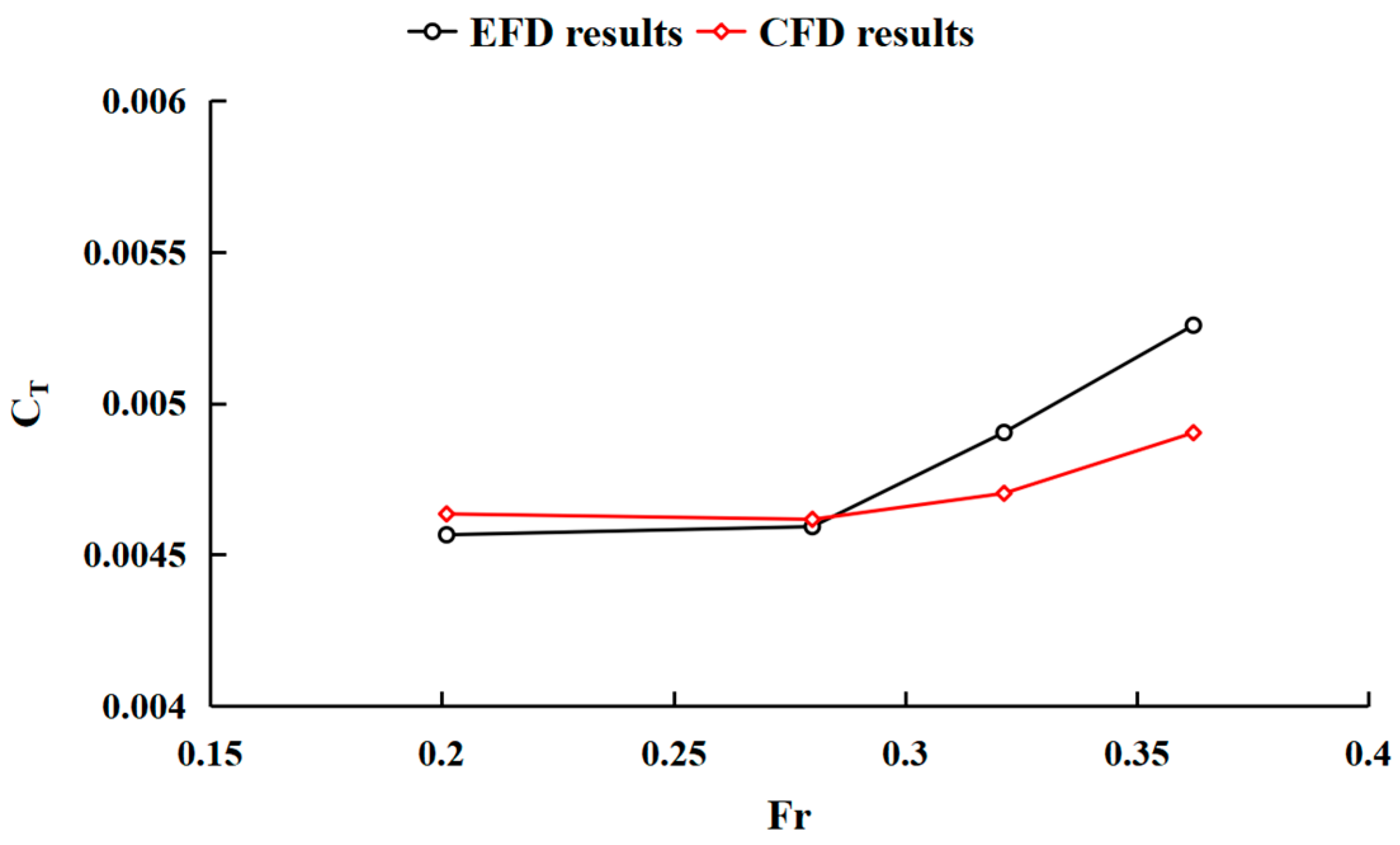
3.1.2. CFD Simulations in Calm Water
3.2. Surrogate Models
3.2.1. ELMAN Surrogate Model
3.2.2. RBF Surrogate Model
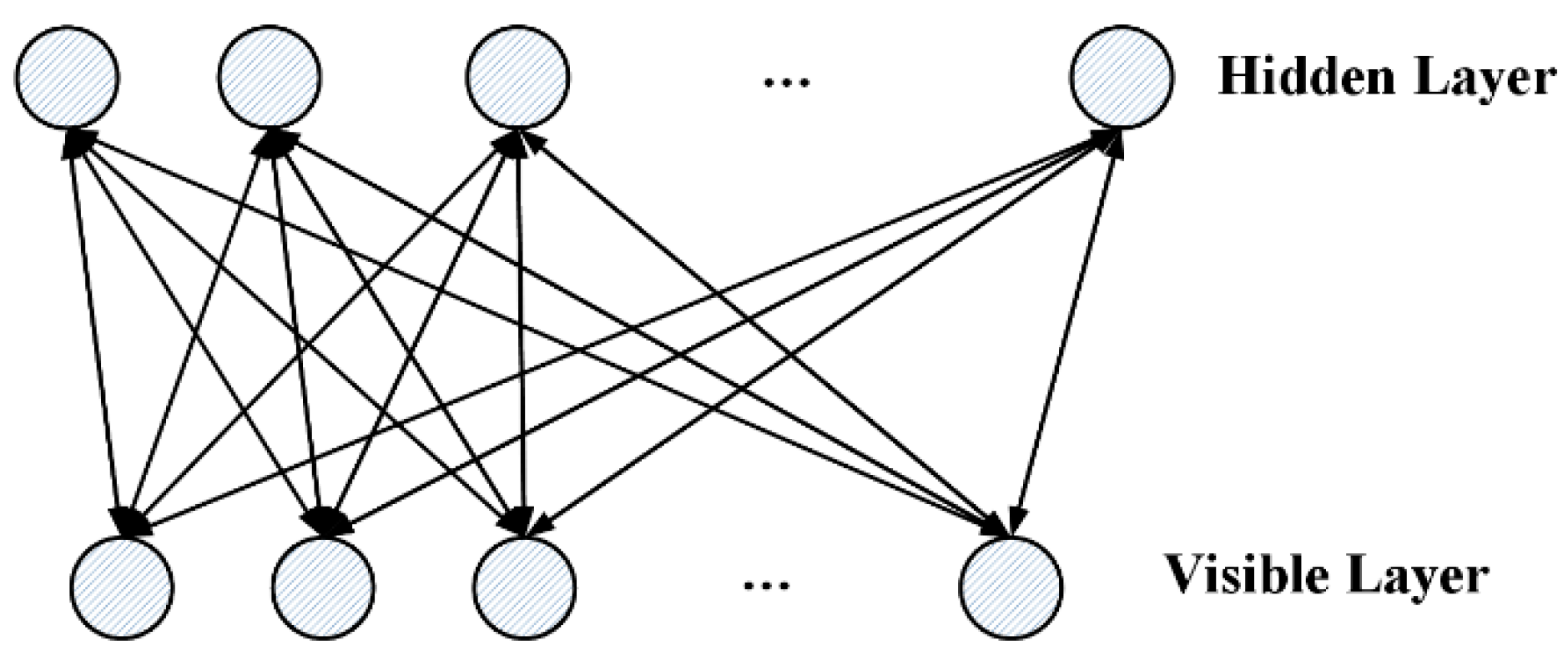
3.2.3. DBN Surrogate Model

4. The Accuracy Evaluation for Different Surrogate Models
4.1. Data Preparation
4.2. Accuracy Evaluation for Different Surrogate Models
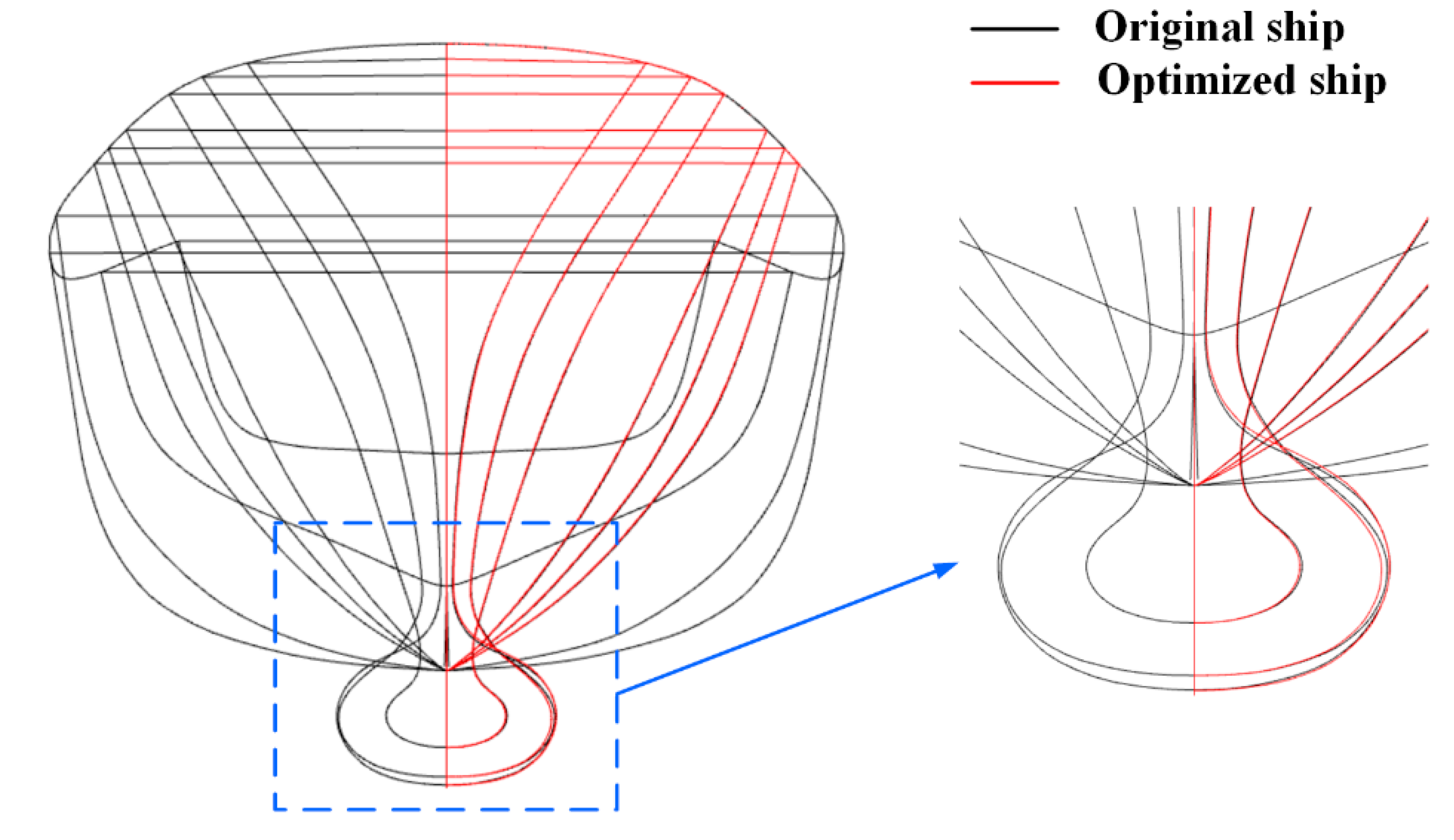
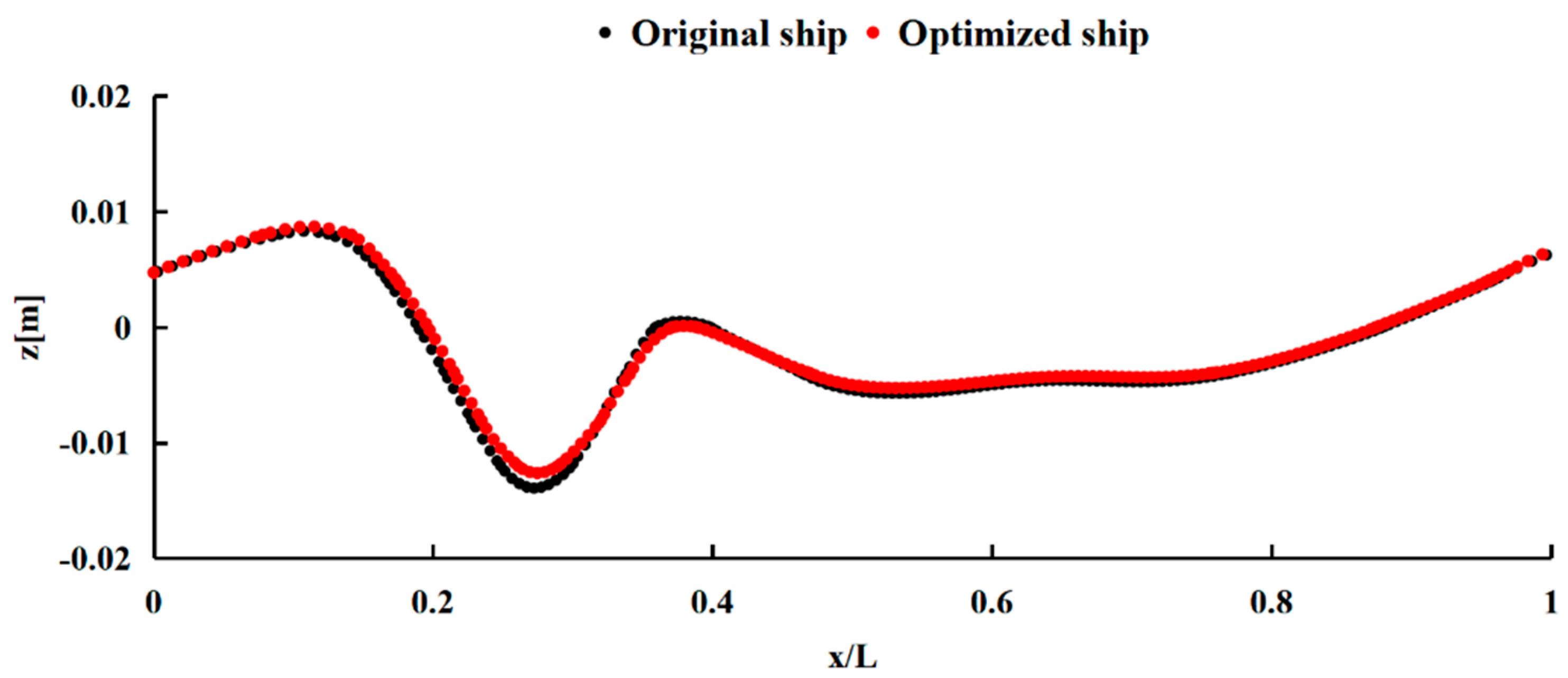
5. The Discussion for the Optimization Results
6. Conclusions and Recommendation for Future Work
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zha, L.; Zhu, R.; Hong, L.; Huang, S. Hull form optimization for reduced calm-water resistance and improved vertical motion performance in irregular head waves. Ocean Eng. 2021, 233, 109208. [Google Scholar] [CrossRef]
- Qiang, Z.; Feng, B.; Liu, Z.; Chang, H.; Wei, X. Optimization method for hierarchical space reduction method and its application in hull form optimization. Ocean. Eng. 2022, 262, 109208. [Google Scholar] [CrossRef]
- Nazemian, A.; Ghadimi, P. CFD-based optimization of a displacement trimaran hull for improving its calm water and wavy condition resistance. Appl. Ocean Res. 2021, 113, 102729. [Google Scholar] [CrossRef]
- Zhao, C.; Wang, W.; Jia, P.; Xie, Y. Marine Design and Research Institute of China optimisation of hull form of ocean-going trawler. Brodogradnja 2021, 72, 33–46. [Google Scholar] [CrossRef]
- Ding, D.; Yao, R.; Luo, N.; Zhou, Y.; Wang, X.; Yu, L. Lines optimization for a medium cruise ship based on rapidity. Ship Eng. 2022, 44, 1–7. [Google Scholar]
- Hamed, A. Multi-objective optimization method of trimaran hull form for resistance reduction and propeller intake flow improvement. Ocean Eng. 2021, 244, 110352. [Google Scholar] [CrossRef]
- Huang, F.; Yang, C. Hull form optimization of a cargo ship for reduced drag. J. Hydrodyn. 2016, 28, 173–183. [Google Scholar] [CrossRef]
- Solak, H.P. Multi-dimensional surrogate based aft form optimization of ships using high fidelity solvers. Brodogradnja 2020, 71, 85–100. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, W.; Wan, D. Hull form optimization based on calm-water wave drag with or without generating bulbous bow. Appl. Ocean Res. 2021, 116, 102861. [Google Scholar] [CrossRef]
- Zhang, W.; Zhou, J.; Yu, B.; Yu, Y. Research on model building for bulbous bow resistance optimization based on BPNN. J. Dalian Univ. Technol. 2021, 61, 160–171. [Google Scholar]
- Tian, X.; Sun, X.; Liu, G.; Xie, Y.; Chen, Y.; Wang, H. Multi-objective optimization of the hull form for the semi-submersible medical platform. Ocean Eng. 2021, 230, 109038. [Google Scholar] [CrossRef]
- Shang, Y.; Zhao, L. Optimization of profile and side-hull spacing of wind turbine operation and maintenance catamaran based on radial basis function. China Offshore Platf. 2022, 37, 70–75. [Google Scholar]
- Liu, X.; Zhao, W.; Wan, D. Multi-fidelity Co-Kriging surrogate model for ship hull form optimization. Ocean Eng. 2021, 243, 110239. [Google Scholar] [CrossRef]
- Feng, Y.; Chen, Z.; Dai, Y.; Cui, L.; Zhang, Z.; Wang, P. Multi-objective optimization of a bow thruster based on URANS numerical simulations. Ocean Eng. 2022, 247, 110784. [Google Scholar] [CrossRef]
- Ouyang, X.; Chang, H.; Liu, Z.; Feng, B.; Zhan, C.; Cheng, X. Application of adaptive sampling method in hull form optimization. J. Shanghai Jiaotong Univ. 2022, 56, 937–943. [Google Scholar]
- Wan, Y.; Hou, Y.; Xiong, Y.; Dong, Z.; Zhang, Y.; Gong, C. Interval optimization design of a submersible surface ship form considering the uncertainty of surrogate model. Ocean Eng. 2022, 263, 112262. [Google Scholar] [CrossRef]
- de Baar, J.; Roberts, S.; Dwight, R.; Mallol, B. Uncertainty quantification for a sailing yacht hull, using multi-fidelity kriging. Comput. Fluids 2015, 123, 185–201. [Google Scholar] [CrossRef] [Green Version]
- Hou, Y.; Huang, S.; Liang, X. Ship hull optimization based on PSO training FRBF neural network. J. Harbin Eng. Univ. 2017, 38, 175–180. [Google Scholar]
- Luo, W.; Guo, X.; Dai, J.; Rao, T. Hull optimization of an underwater vehicle based on dynamic surrogate model. Ocean Eng. 2021, 230, 109050. [Google Scholar] [CrossRef]
- Wu, G.; Ma, W.; Liu, C.; Wang, S. IOT and cloud computing based parallel implementation of optimized RBF neural network for loader automatic shift control. Comput. Commun. 2020, 158, 95–103. [Google Scholar] [CrossRef]
- Chu, H.; Wei, J.; Wu, W. Streamflow prediction using LASSO-FCM-DBN approach based on hydro-meteorological condition classification. J. Hydrol. 2019, 580, 124253. [Google Scholar] [CrossRef]
- Li, Y.; Peng, T.; Hua, L.; Ji, C.; Ma, H.; Nazir, M.S.; Zhang, C. Research and application of an evolutionary deep learning model based on improved grey wolf optimization algorithm and DBN-ELM for AQI prediction. Sustain. Cities Soc. 2022, 87, 104209. [Google Scholar] [CrossRef]
- Xi, Y.; Zhao, J.; Lin, D.; Yu, L.; Chen, G.; Zhang, J.; Li, B.; Li, F.; Jiang, Y. Transformer evaluation and life prediction method based on DBN and health index. Electron. Device 2022, 45, 878–882. [Google Scholar]
- Wang, M.; Wang, H.; Wang, J. Wear volume prediction of brake shoes used in heavy freight wagon based on DBN. Comput. Simul. 2022, 39, 134–139. [Google Scholar]
- Huang, S.; Jiang, L.; Li, Z.; Yang, G.; Song, F. Corona loss prediction of UHV AC transmission line based on DBN neural network optimized by PSO. Electr. Power 2022, 55, 95–102. [Google Scholar]
- Degiuli, N.; Farkas, A.; Martić, I.; Zeman, I.; Ruggiero, V.; Vasiljević, V.; Vienna Model Basin Ltd. Numerical and experimental assessment of the total resistance of a yacht. Brodogradnja 2021, 72, 61–80. [Google Scholar] [CrossRef]
- Tezdogan, T.; Incecik, A.; Turan, O. Full-scale unsteady RANS simulations of vertical ship motions in shallow water. Ocean Eng. 2016, 123, 131–145. [Google Scholar] [CrossRef] [Green Version]
- Gui, L.; Longo, J.; Stern, F. Biases of PIV measurement of turbulent flow and the masked correlation-based interrogation algorithm. Exp. Fluids 2001, 30, 27–35. [Google Scholar] [CrossRef]
- Gui, L.; Longo, J.; Stern, F. Towing tank PIV measurement system, data and uncertainty assessment for DTMB Model 5512. Exp. Fluids 2001, 31, 336–346. [Google Scholar] [CrossRef]
- Longo, J.; Stern, F. Uncertainty Assessment for Towing Tank Tests With Example for Surface Combatant DTMB Model 5415. J. Ship Res. 2005, 49, 55–68. [Google Scholar] [CrossRef]
- Elman, J.L. Finding structure in time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Zhao, D. Prediction model for the height of water flowing fractured zones based on ELMAN neuran network. Shanxi Coal 2022, 42, 8–14. [Google Scholar]
- Shi, X.H. Some Theoretical Studies of ELMAN Neural Networks and Evolutionary Algorithms and Their Applications; Jilin University Press: Changchun, China, 2006. [Google Scholar]
- Feng, M.F.; Lu, J.C. Study on short time traffic flow prediction based on RBF neural network optimized by PSO. Comput. Simul. 2010, 27, 323–326. [Google Scholar]
- Hinton, G.E.; Osindero, S.; Teh, Y.-W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- Wang, F. Retrieval and Recommendation System of Resources Based on Deep Belief Networks; Beijing University of Posts and Telecommunications Press: Beijing, China, 2015. [Google Scholar]
- Bengio, Y. Learning deep architectures for AI. Found. Trends® Mach. Learn. 2009, 2, 1–127. [Google Scholar] [CrossRef]
- Miao, A.; Zhao, M.; Wan, D. CFD-based multi-objective optimization of S60 Catamaran considering demihull shape and separation. Appl. Ocean. Res. 2020, 97, 102071. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Particulars | Value |
|---|---|
| Scale factor | 1:46.6 |
| Froude number at design speed | 0.28 |
| Length Lpp (m) | 3.048 |
| Draft D (m) | 0.132 |
| Wetted surface area S (m2) | 1.371 |
| Evaluation Parameters | Results |
|---|---|
| Convergence ratio | 0.054 |
| Extrapolated value (%) | 0.46156 |
| Approximate relative error (%) | 0.15165 |
| Extrapolation relative error (%) | 0.008631 |
| Convergence index for refine mesh | 0.0108% |
| No. | Fixed Parameter | Design Variables for Optimization | CT Obtained by CFD Method | |
|---|---|---|---|---|
| a | b | |||
| 1 | −0.20041 | 0.01136 | 0.00101 | 0.00453852 |
| 2 | −0.20041 | 0.01889 | 0.01568 | 0.00451944 |
| 3 | −0.20041 | 0.01397 | 0.01759 | 0.00451129 |
| 4 | −0.20041 | 0.00894 | 0.01518 | 0.00450957 |
| 5 | −0.20041 | 0.01387 | 0.00352 | 0.00457766 |
| … | … | … | … | … |
| 196 | −0.20041 | 0.01528 | 0.01719 | 0.00451809 |
| 197 | −0.20041 | 0.00704 | 0.01668 | 0.00451901 |
| 198 | −0.20041 | 0.01266 | 0.00975 | 0.00451607 |
| 199 | −0.20041 | 0.0197 | 0.01256 | 0.0045171 |
| 200 | −0.20041 | 0.00281 | 0.01065 | 0.00453122 |
| Evaluation Parameters | ELMAN Algorithm | RBF Algorithm | DBN Algorithm |
|---|---|---|---|
| RMSE | 0.00115% | 0.0012% | 0.00093% |
| MAE | 9.96 × 10−6 | 1.04 × 10−5 | 6.97 × 10−6 |
| R2 | 0.7971 | 0.7508 | 0.9421 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S. Research on the Deep Learning Technology in the Hull Form Optimization Problem. J. Mar. Sci. Eng. 2022, 10, 1735. https://doi.org/10.3390/jmse10111735
Zhang S. Research on the Deep Learning Technology in the Hull Form Optimization Problem. Journal of Marine Science and Engineering. 2022; 10(11):1735. https://doi.org/10.3390/jmse10111735
Chicago/Turabian StyleZhang, Shenglong. 2022. "Research on the Deep Learning Technology in the Hull Form Optimization Problem" Journal of Marine Science and Engineering 10, no. 11: 1735. https://doi.org/10.3390/jmse10111735