Modelling and Stability Analysis of Wind Power Plants Connected to Weak Grids

 ,
,
Abstract
:Featured Application
Abstract
1. Introduction
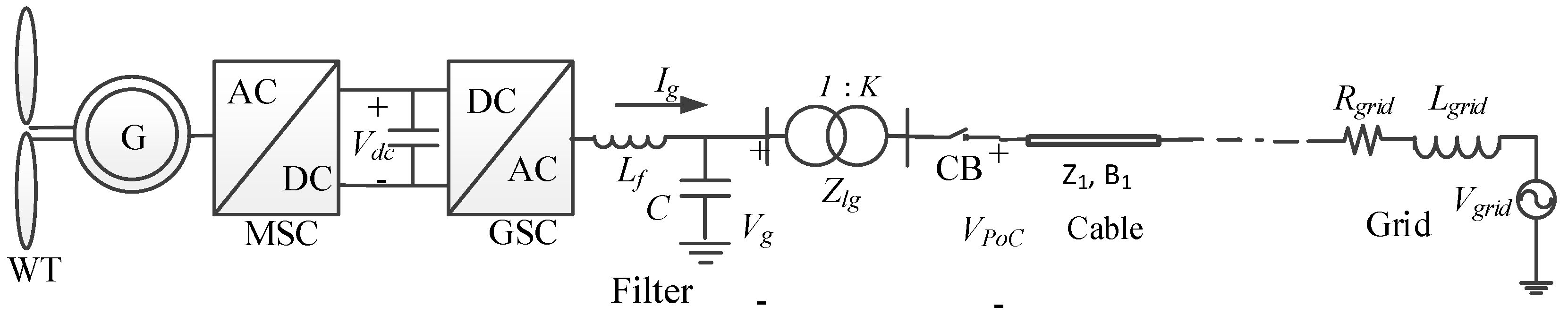
2. Full-Scale Converter-Based Wind Turbines
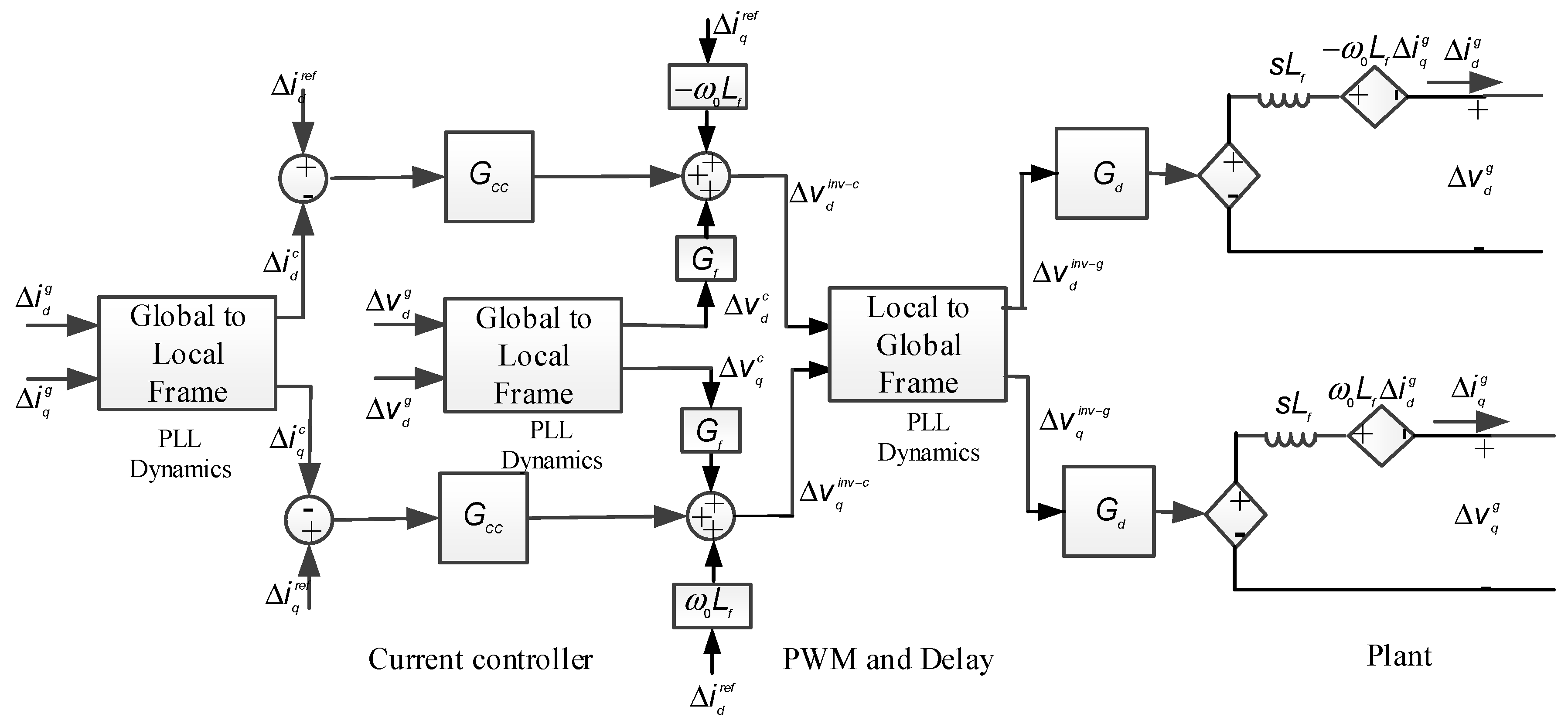
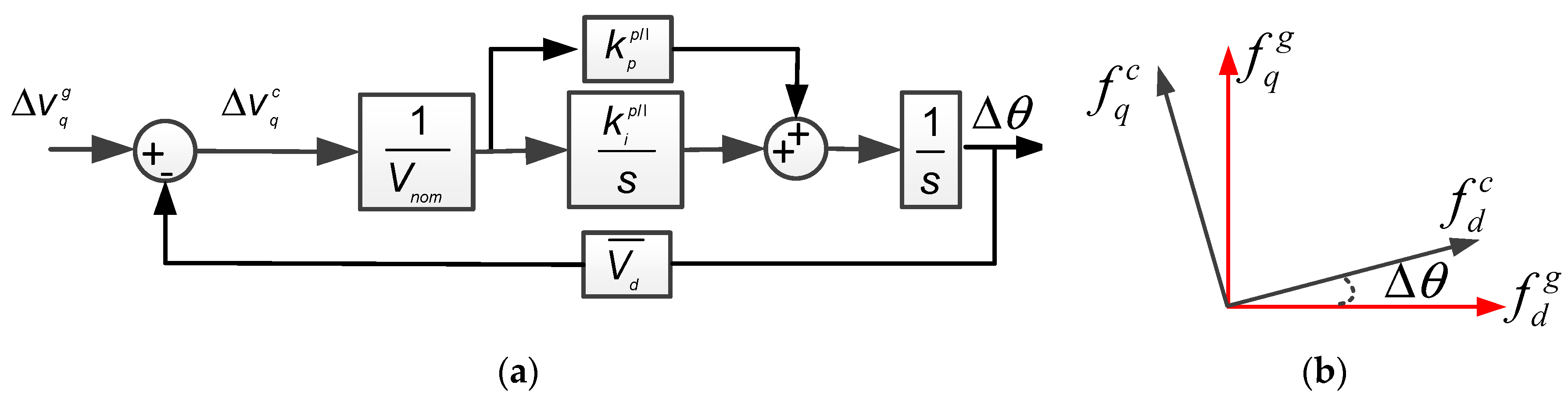
3. Small-Signal Admittance Model in dq-Domain
4. Equivalent Small-Signal Admittance Model in Sequence Domain
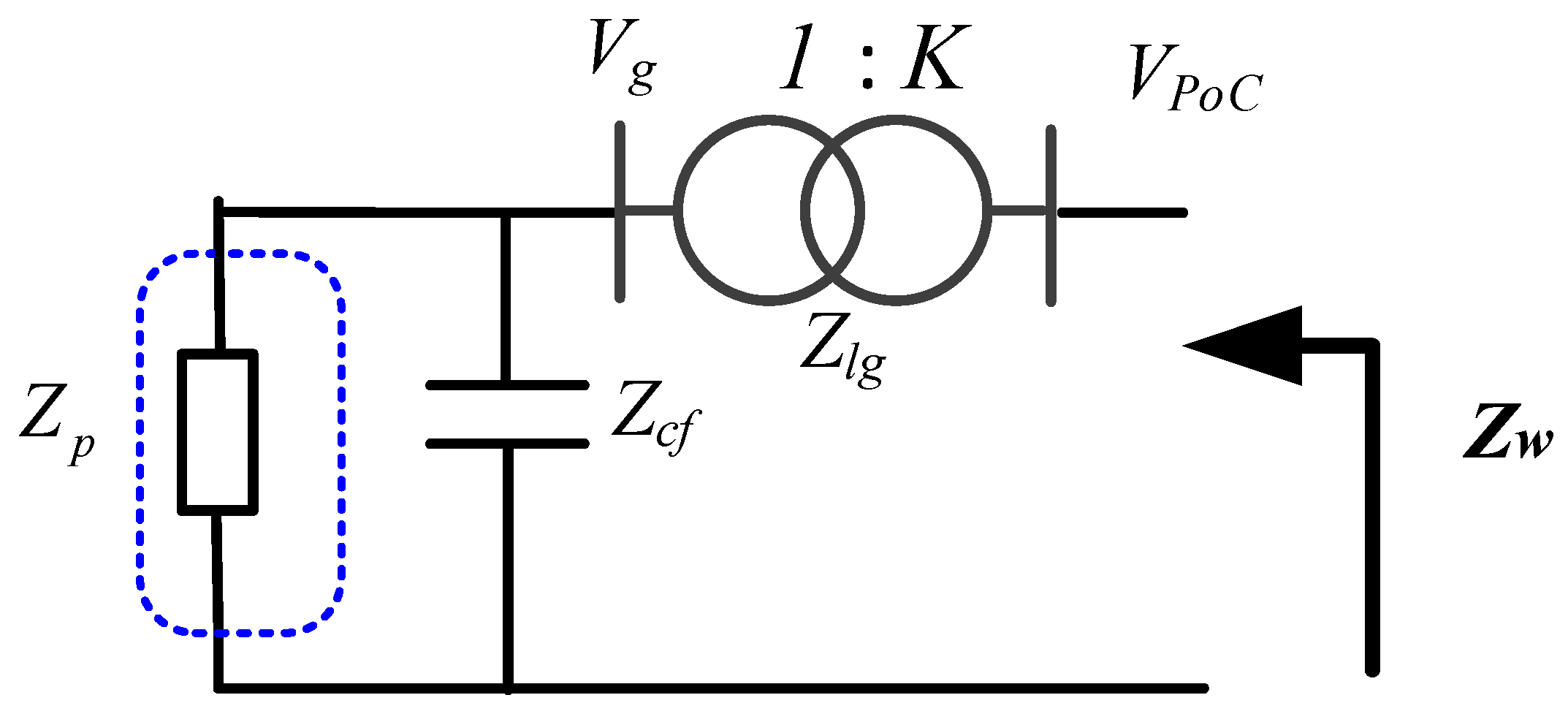
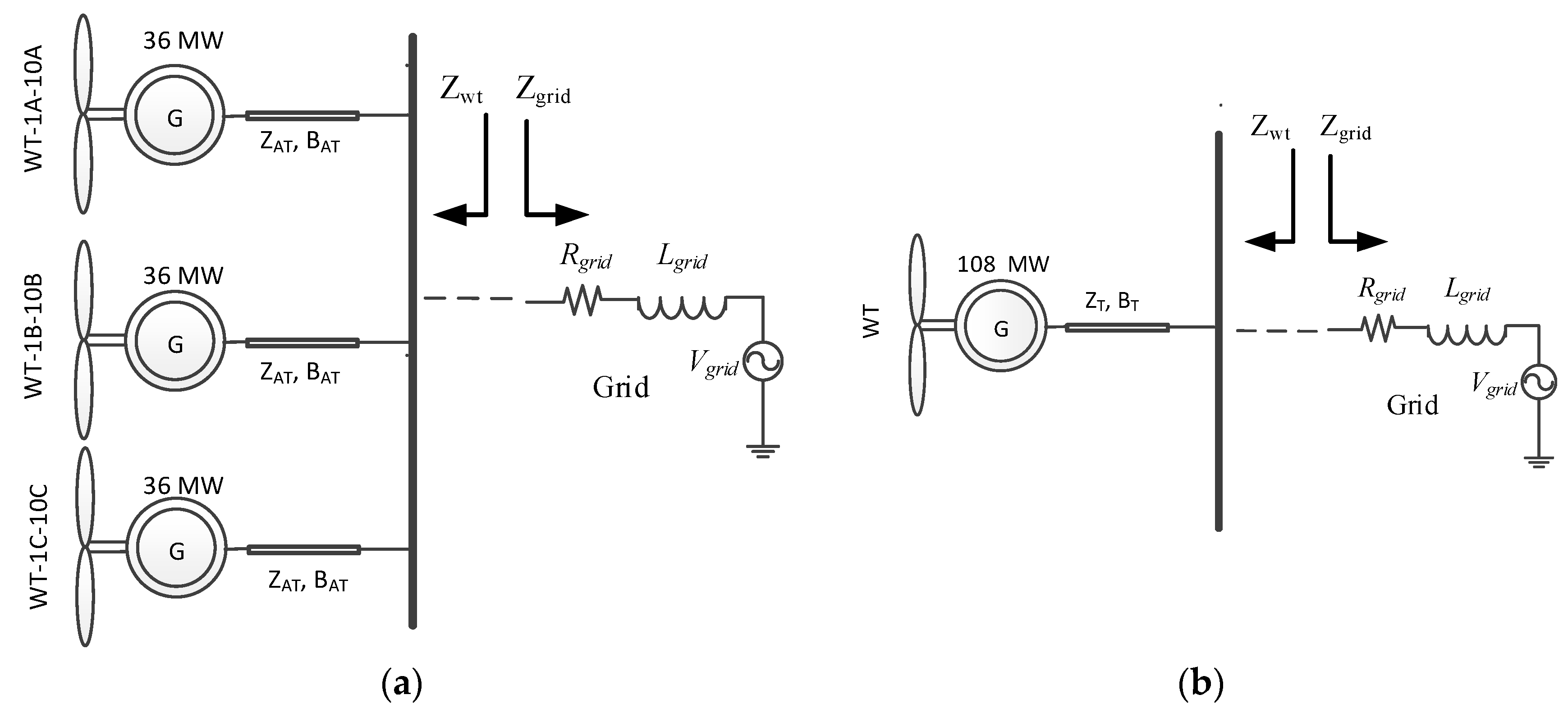
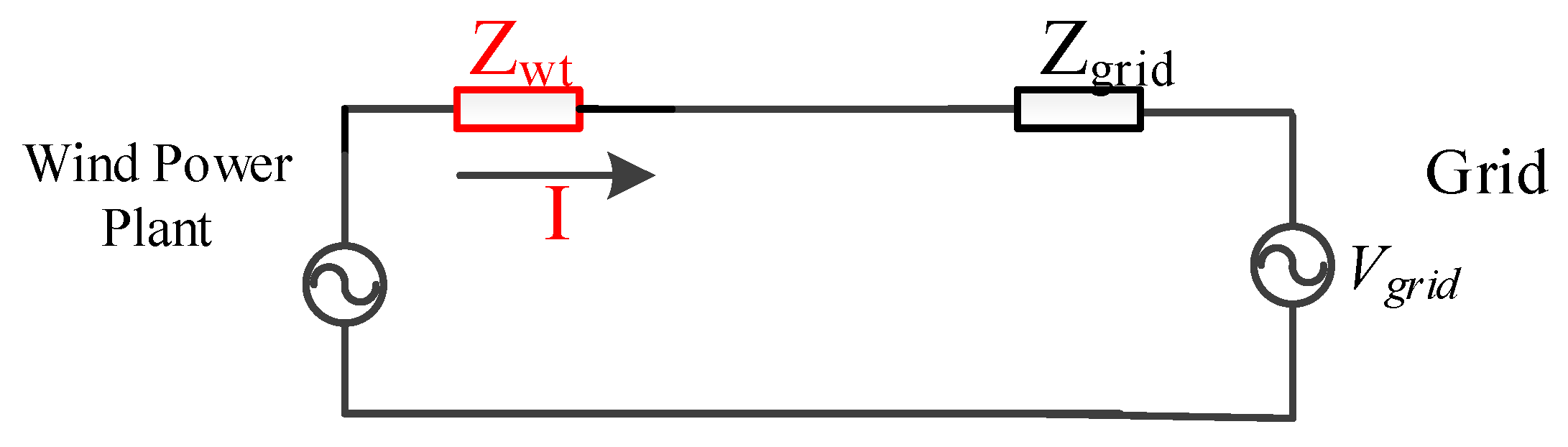
5. Total Wind Turbine Thévenin Impedance
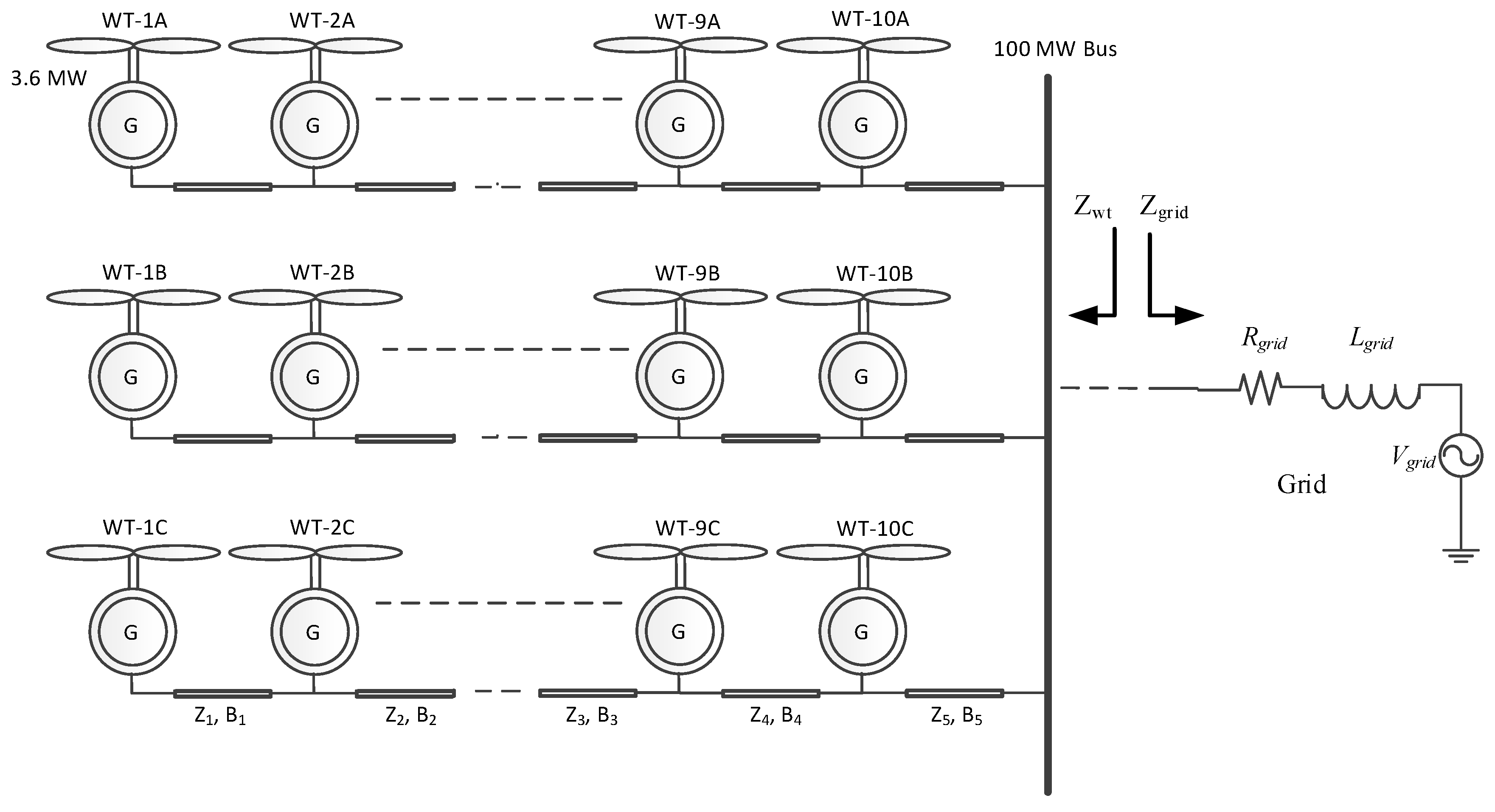
6. Case Study of a Wind Power Plant Connected to a Weak Grid
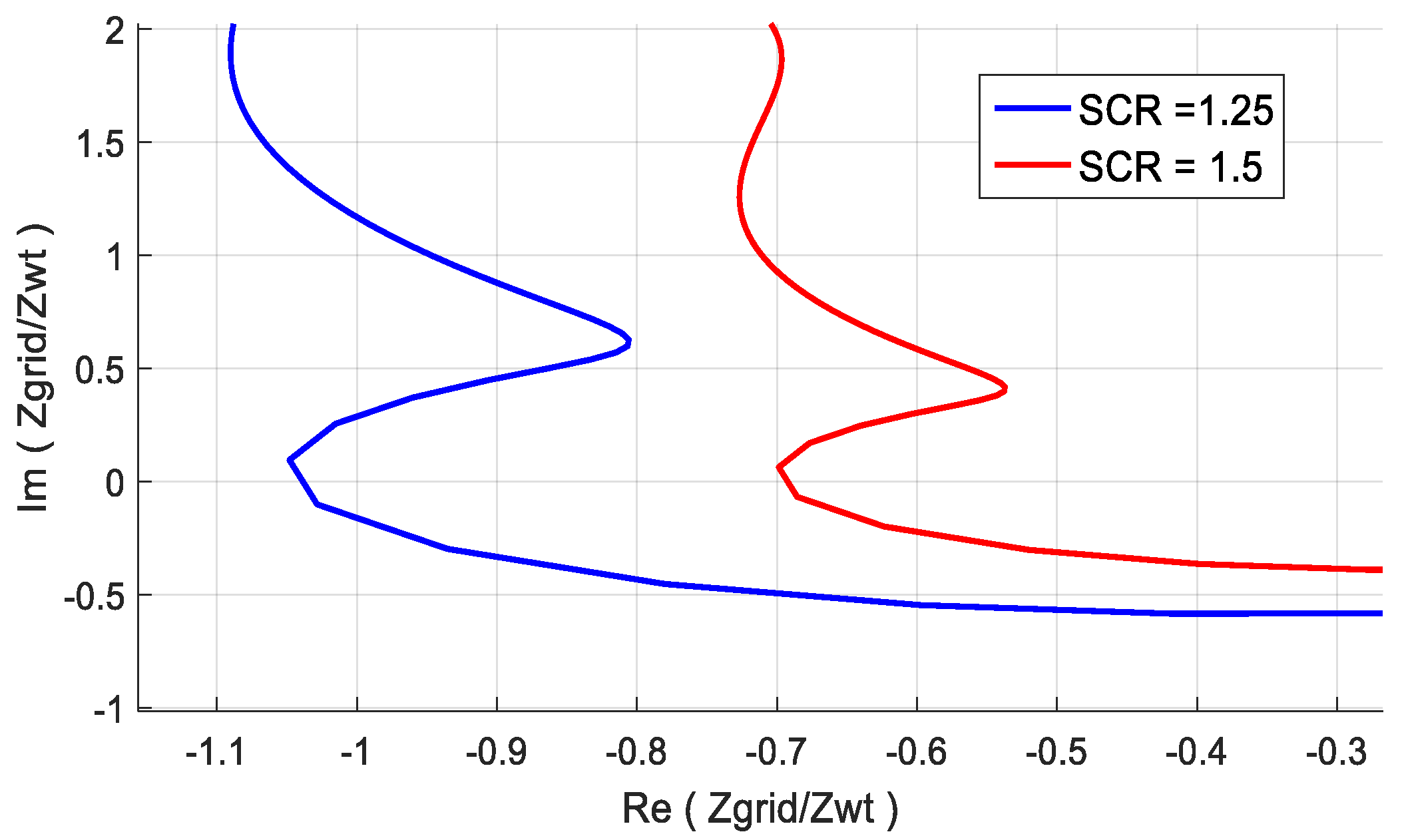
6.1. Stability Analysis
6.1.1. Short Circuit Ratio (SCR) Variations for Xg/R = 20 and Xc/Xg = 0
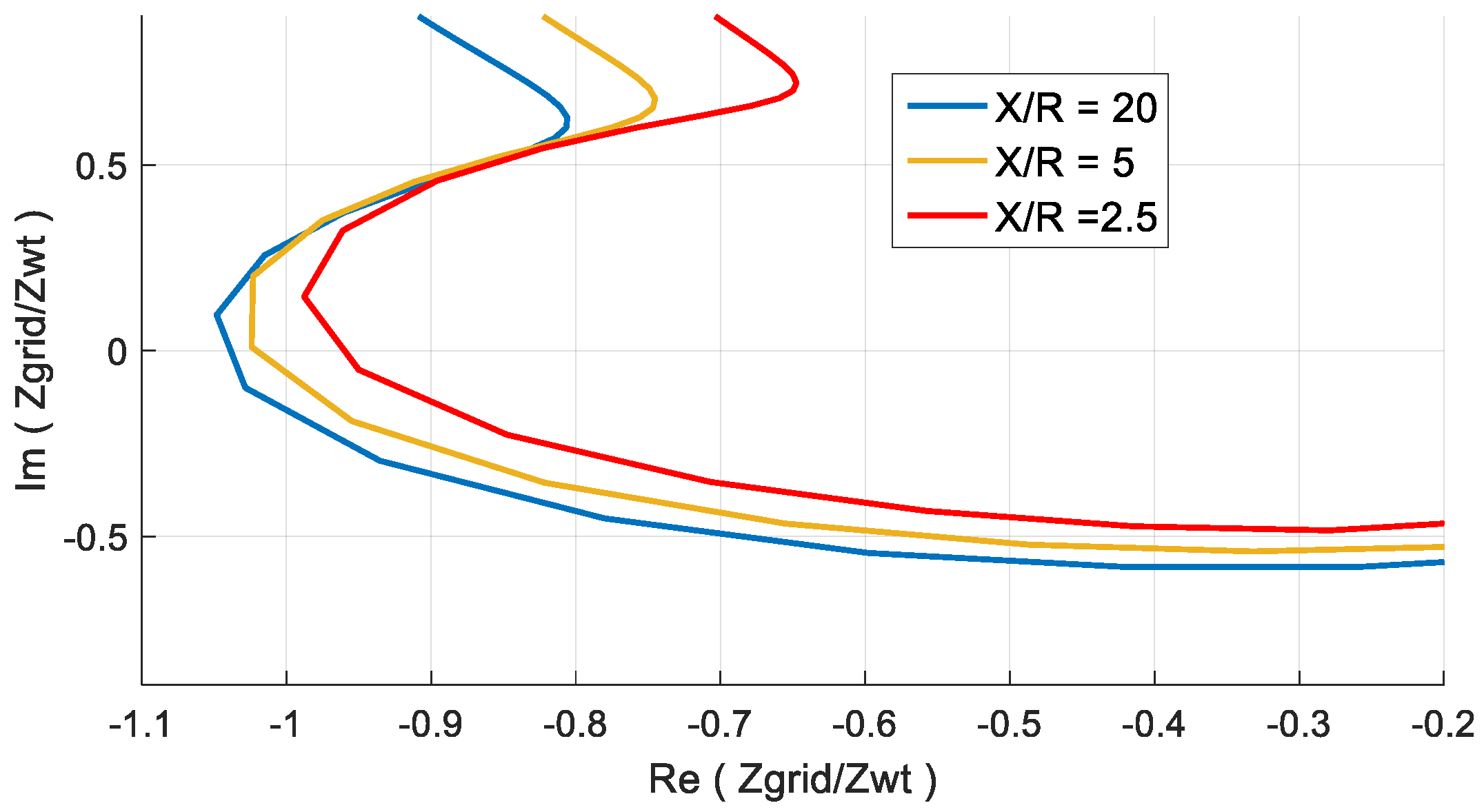
6.1.2. Xg/R variations for SCR = 1.25 and Xc/Xg = 0
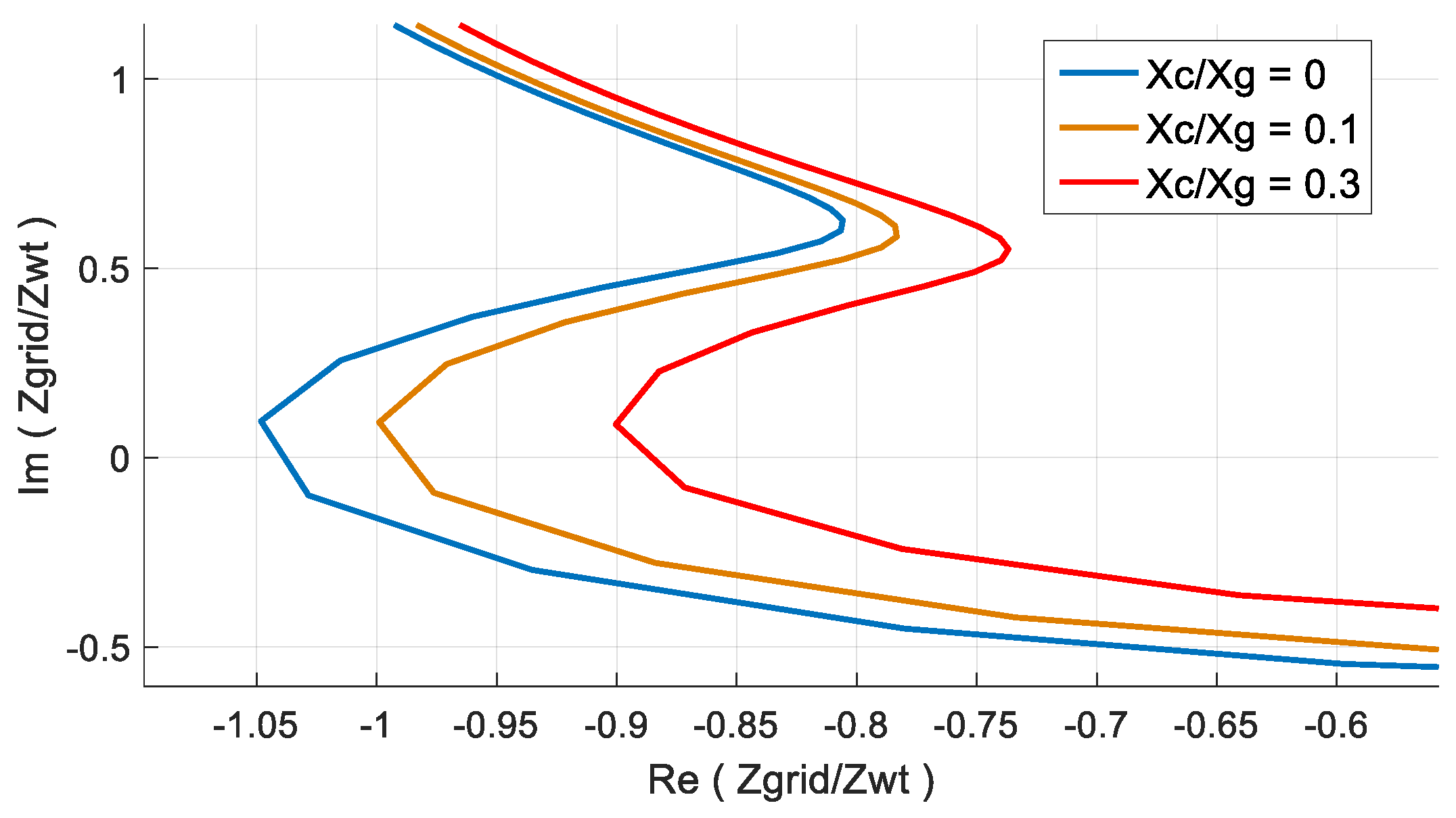
6.1.3. Xc/Xg Variations for SCR = 1.25 and Xg/R = 20
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| dc-link voltage | reactive power reference | ||
| filter chock | injected reactive power | ||
| filter capacitor | dc-link voltage reference | ||
| transformer leakage impedance | d-axis current reference | ||
| filter capacitor voltage | q-axis current reference | ||
| wind turbine current | sampling time | ||
| transformer ratio | nominal voltage | ||
| point of connection voltage | proportional gain of the PLL | ||
| cable impedance | integral gain of the PLL | ||
| cable susceptance | equivalent small-signal positive impedance of the wind turbine | ||
| grid resistance | filter capacitor impedance | ||
| grid impedance | leakage impedance | ||
| grid voltage | Thévenin impedance | ||
| d-axis voltage of the grid | equivalent series cable impedance | ||
| q-axis voltage of the grid | equivalent shunt cable susceptance | ||
| grid voltage angle | Thévenin impedance of the aggregated wind power plant | ||
| grid frequency |
References
- Mitra, P.; Zhang, L.; Harnefors, L. Offshore wind integration to a weak grid by VSC-HVDC links using power-synchronization control: A case study. IEEE Trans. Power Del. 2014, 29, 453–461. [Google Scholar] [CrossRef]
- Pereira, F.J.F.; Rodrigues, J.M.; de Oliveira, K.L.M.; Araujo, D.R.R.P.; de Araujo, L.R. Simulations and analysis of distribution systems with aspects of smart grids using MICQ, RTDS and PSCAD. In Proceedings of the IEEE ISGT Conference, Sao Paulo, Brazil, 15–17 April 2013; pp. 1–8. [Google Scholar]
- Zhang, Q.; Lu, G.; Zhang, C. Simulated study of the multiple cascade medium-voltage inverter based on PSCAD/EMTDC. In Proceedings of the IEEE ICEMS, Chiba, Japan, 13–16 November 2016; pp. 1–6. [Google Scholar]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Sun, J. Impedance-based stability criterion for grid-connected inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Badrzadeh, B.; Gupta, M.; Singh, N.; Petersson, A.; Max, L.; Høgdahl, M. Power system harmonic analysis in wind power plants—Part I: Study methodology and techniques. In Proceedings of the IEEE IAS, Las Vegas, NV, USA, 7–11 October 2012; pp. 1–11. [Google Scholar]
- Cespedes, M.; Sun, J. Impedance modeling and analysis of grid connected voltage-source converters. IEEE Trans. Power Electron. 2014, 29, 1254–1261. [Google Scholar] [CrossRef]
- Bottrell, N.; Prodanovic, M.; Green, T.C. Dynamic stability of a microgrid with an active load. IEEE Trans. Power Electron. 2013, 28, 5107–5119. [Google Scholar] [CrossRef]
- Singh, A.; Kaviani, A.K.; Mirafzal, B. On dynamic models and stability analysis of three-phase phasor PWM-based CSI for stand-alone applications. IEEE Trans. Ind. Electron. 2015, 62, 2698–2707. [Google Scholar] [CrossRef]
- Coelho, E.A.A.; Cortizo, P.C.; Garcia, P.F.D. Small-signal stability for parallel-connected inverters in stand-alone AC supply systems. IEEE Trans. Ind. Appl. 2002, 38, 533–542. [Google Scholar] [CrossRef]
- Kunjumuhammed, L.P.; Pal, B.C.; Oates, C.; Dyke, K.J. The adequacy of the present practice in dynamic aggregated modeling of wind farm systems. IEEE Trans. Sustain. Energy 2017, 8, 23–32. [Google Scholar] [CrossRef]
- Kwon, J.; Wang, X.; Blaabjerg, F.; Bak, C.L.; Wood, A.R.; Watson, N. Linearized modeling methods of ac-dc converters for an accurate frequency response. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1526–1541. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F. Harmonic stability in power electronic based power systems: Concept, modeling, and analysis. IEEE Trans. Smart Grid 2018, 10, 2858–2870. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Blaabjerg, F.; Chen, Z. Small-signal stability analysis of inverter-fed power systems using component connection method. IEEE Trans. Smart Grid 2018, 9, 5301–5310. [Google Scholar] [CrossRef]
- Gaba, G.; Lefebver, S.; Mukhedkar, D. Comparative analysis and study of the dynamic stability of AC/DC systems. IEEE Trans. Power Syst. 1988, 3, 978–985. [Google Scholar] [CrossRef]
- Hou, P.; Ebrahimzadeh, E.; Wang, X.; Blaabjerg, F.; Fang, J.; Wang, Y. Harmonic stability analysis of offshore wind farm with CCM. In Proceedings of the IEEE IECON Conference, Beijing, China, 29 October–1 November 2017; pp. 1–6. [Google Scholar]
- Harnefors, L.; Bongiorno, M.; Lundberg, S. Input-Admittance Calculation and Shaping for Controlled Voltage-Source Converters. IEEE Trans. Ind. Electron. 2007, 54, 3323–3334. [Google Scholar] [CrossRef]
- Shah, S.; Parsa, L. Impedance Modeling of Three-Phase Voltage Source Converters in DQ, Sequence, and Phasor Domains. IEEE Trans. Energy Convers. 2017, 32, 1139–1150. [Google Scholar] [CrossRef]
- Holmes, D.G.; Lipo, T.A. Pulse Width Modulation for Power Converters: Principles and Practice; Wiley: Piscataway, NJ, USA, 2003. [Google Scholar]
- Rygg, A.; Molinas, M.; Zhang, C.; Cai, X. A modified sequence-domain impedance definition and its equivalence to the dq-domain impedance definition for the stability analysis of AC power electronic systems. IEEE Trans. Emerg. Sel. Top. Power Electron. 2016, 4, 1383–1396. [Google Scholar] [CrossRef]
- Ebrahimzadeh, E.; Blaabjerg, F.; Wang, X.; Bak, C.L.; Lund, T.; Andersen, G.K.; Suárez, C.G.; Berg, J. Small signal modeling of wind farms. In Proceedings of the IEEE ECCE Conference, Cincinnati, OH, USA, 1–5 October 2017; pp. 1–7. [Google Scholar]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Small signal stability analysis of three-phase AC systems in the presence of constant power loads based on measured d−q frame impedances. IEEE Trans. Power Electron. 2015, 30, 5952–5963. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Analysis of D-Q small-signal impedance of grid-tied inverters. IEEE Trans. Power Electron. 2016, 31, 675–687. [Google Scholar] [CrossRef]
- Kunjumuhammed, L.P.; Pal, B.C.; Oates, C.; Dyke, K.J. Electrical oscillations in wind farm systems: Analysis and insight based on detailed modeling. IEEE Trans. Sustain. Energy 2016, 7, 51–62. [Google Scholar] [CrossRef]
- Kwon, J.; Wang, X.; Blaabjerg, F.; Bak, C.L.; Wood, A.R.; Watson, N. Harmonic instability analysis of a single-phase grid-connected converter using a harmonic state-space modeling method. IEEE Trans. Ind. Appl. 2016, 52, 4188–4200. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, F.; Wang, J.; Rodríguez, J.; Kennel, R. Nonlinear direct control for three-level NPC back-to-back converter PMSG wind turbine systems: Experimental assessment with FPGA. IEEE Trans. Ind. Inf. 2017, 13, 1172–1183. [Google Scholar] [CrossRef]
- Ebrahimzadeh, E.; Blaabjerg, F.; Wang, X.; Bak, C.L. Bus participation factor analysis for harmonic instability in power electronics based power systems. IEEE Trans. Power Electron. 2018, 33, 10341–10351. [Google Scholar] [CrossRef]
- Xing, P.; Fu, L.; Wang, G.; Wang, Y.; Zhang, Y. A compositive control method of low-voltage ride through for PMSG-based wind turbine generator system. IET Gen. Transm. Distrib. 2018, 12, 117–125. [Google Scholar] [CrossRef]
- Yu, L.; Li, R.; Xu, L. Distributed PLL-based control of offshore wind turbine connected with diode-rectifier based HVDC systems. IEEE Trans. Power Del. 2018, 33, 1328–1336. [Google Scholar] [CrossRef]
- Wang, J.; Yan, J.D.; Jiang, L.; Zou, J. Delay-dependent stability of single-loop controlled grid-connected inverters with LCL filters. IEEE Trans. Power Electron. 2016, 31, 743–757. [Google Scholar] [CrossRef]
- Ebrahimzadeh, E. Electrical Oscillations in Wind Power Plants: Modeling, Control, and Mitigation. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 2018. [Google Scholar]
- Muljadi, E.; Pasupulati, S.; Ellis, A.; Kosterov, D. Method of equivalencing for a large wind power plant with multiple turbine representation. In Proceedings of the IEEE Power and Energy Society General Meeting, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–9. [Google Scholar]













| SCR | P1 | P2 | P3 |
|---|---|---|---|
| 1.25 | 123 + j184 | 4.61 + j449 | −240 + j596 |
| 1.5 | −117 + j189 | −30.6 + j446 | −297 + j669 |
| Xg/R | P1 | P2 | P3 |
|---|---|---|---|
| 20 | −123 + j184 | 4.61 + j449 | −240 + j596 |
| 5 | −124 + j189 | 2.07 + j438 | −255 + j596 |
| 2.5 | −125 + j196 | −2.97 + j427 | −245 + j596 |
| Xc/Xg | P1 | P2 | P3 |
|---|---|---|---|
| 0 | −123 + j184 | 4.61 + j449 | −240 + j596 |
| 0.1 | −119 + j182 | −0.61 + j449 | −239 + j600 |
| 0.3 | −110 + j175 | −11.1 + j450 | −237 + j609 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ebrahimzadeh, E.; Blaabjerg, F.; Lund, T.; Godsk Nielsen, J.; Carne Kjær, P. Modelling and Stability Analysis of Wind Power Plants Connected to Weak Grids. Appl. Sci. 2019, 9, 4695. https://doi.org/10.3390/app9214695
Ebrahimzadeh E, Blaabjerg F, Lund T, Godsk Nielsen J, Carne Kjær P. Modelling and Stability Analysis of Wind Power Plants Connected to Weak Grids. Applied Sciences. 2019; 9(21):4695. https://doi.org/10.3390/app9214695
Chicago/Turabian StyleEbrahimzadeh, Esmaeil, Frede Blaabjerg, Torsten Lund, John Godsk Nielsen, and Philip Carne Kjær. 2019. "Modelling and Stability Analysis of Wind Power Plants Connected to Weak Grids" Applied Sciences 9, no. 21: 4695. https://doi.org/10.3390/app9214695