Virtual Synchronous Motor Based-Control of a Three-Phase Electric Vehicle Off-Board Charger for Providing Fast-Charging Service

Abstract
:1. Introduction
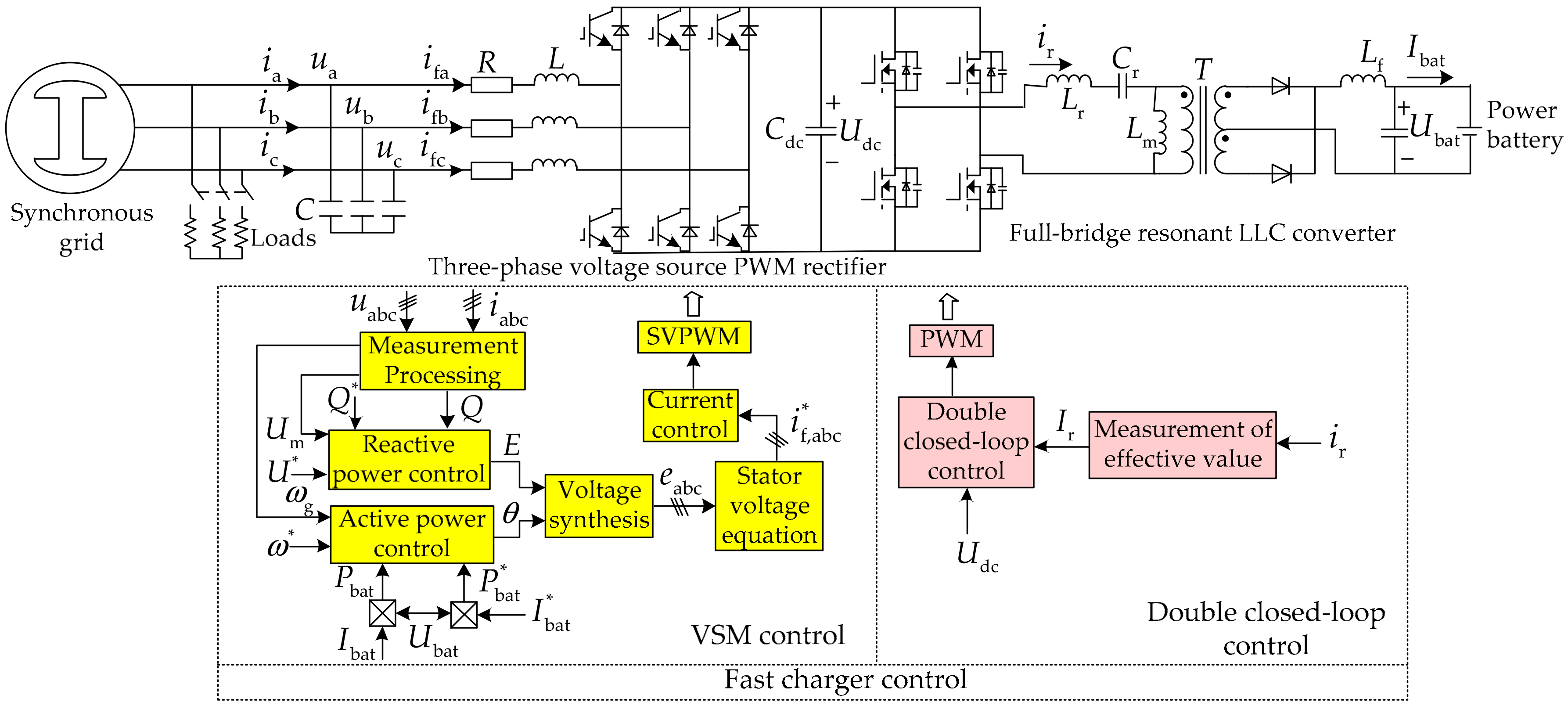
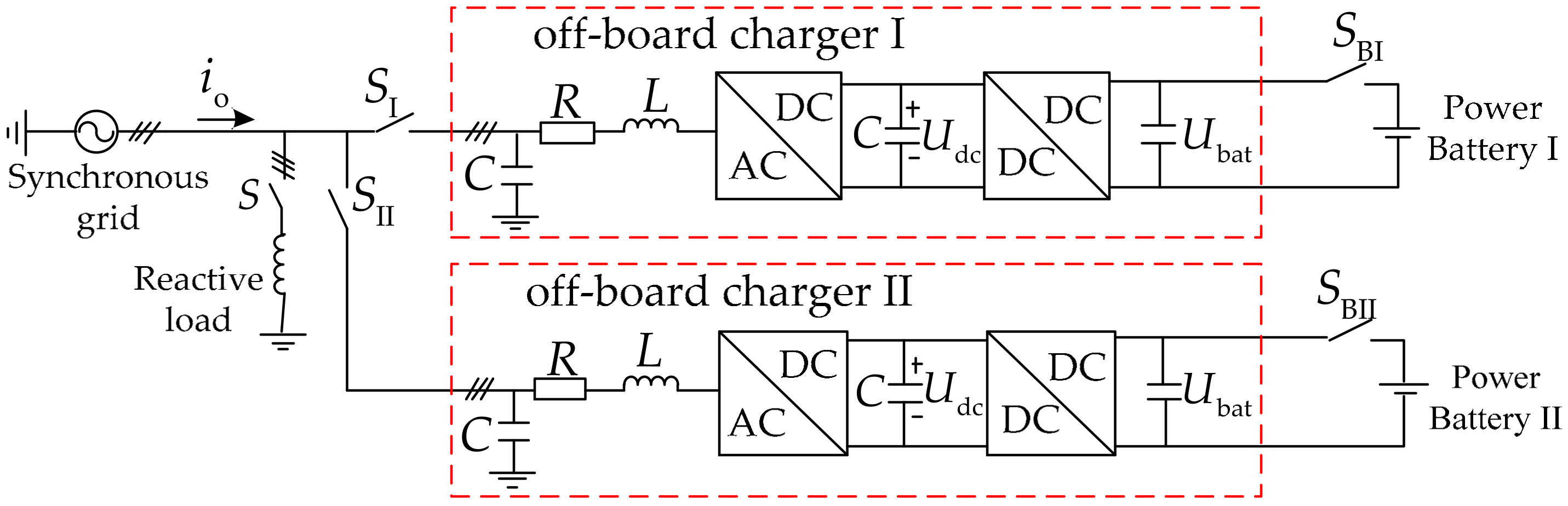
2. Overview of System Configuration
- VSM control not only ensures inertia and damping emulation and frequency support as well as voltage control, but also make the off-board charger provide the constant-current fast charging service for the EV’s power battery.
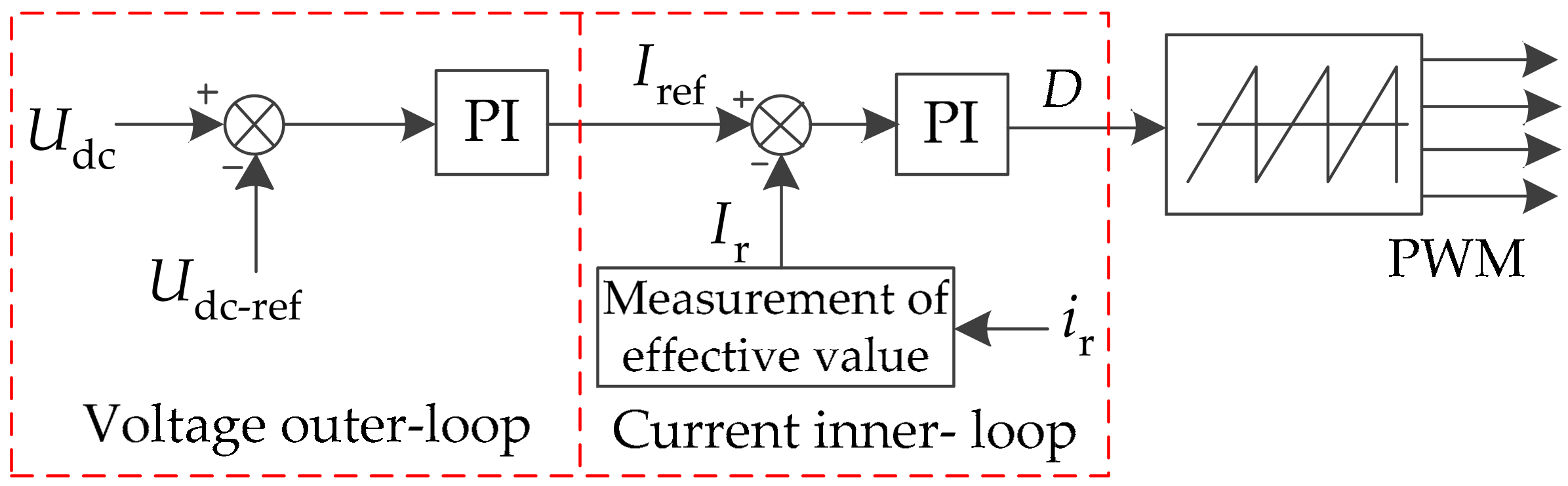
- Double closed-loop control is in charge of stabilizing the DC bus voltage Udc.
3. Off-board Charger Control
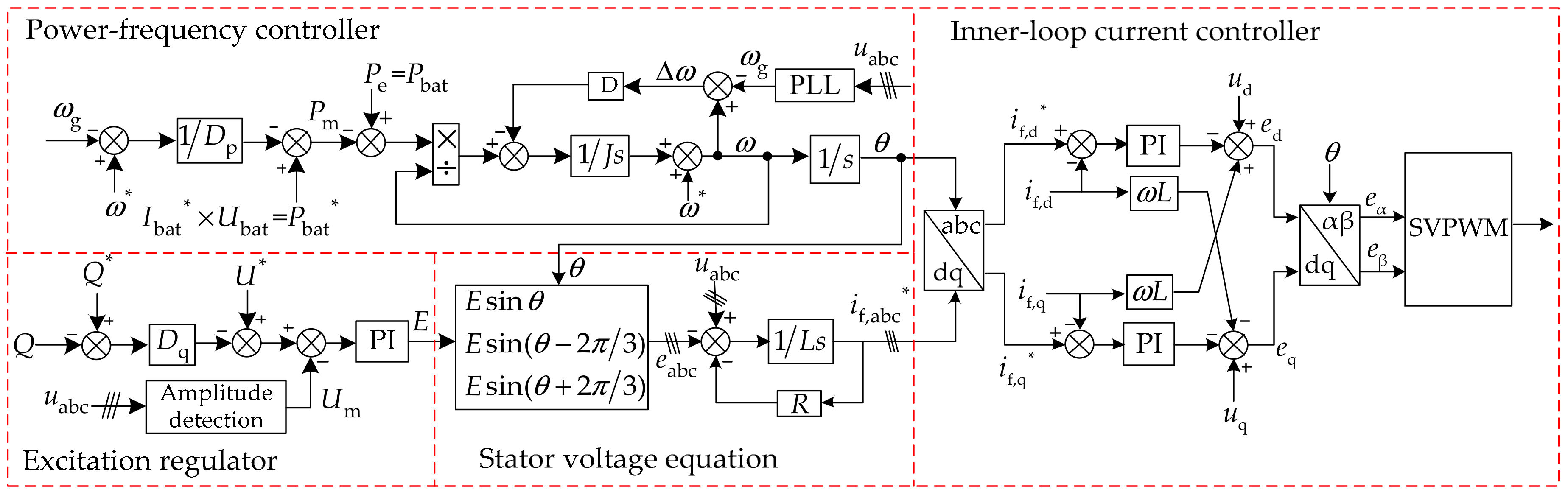
3.1. VSM Control
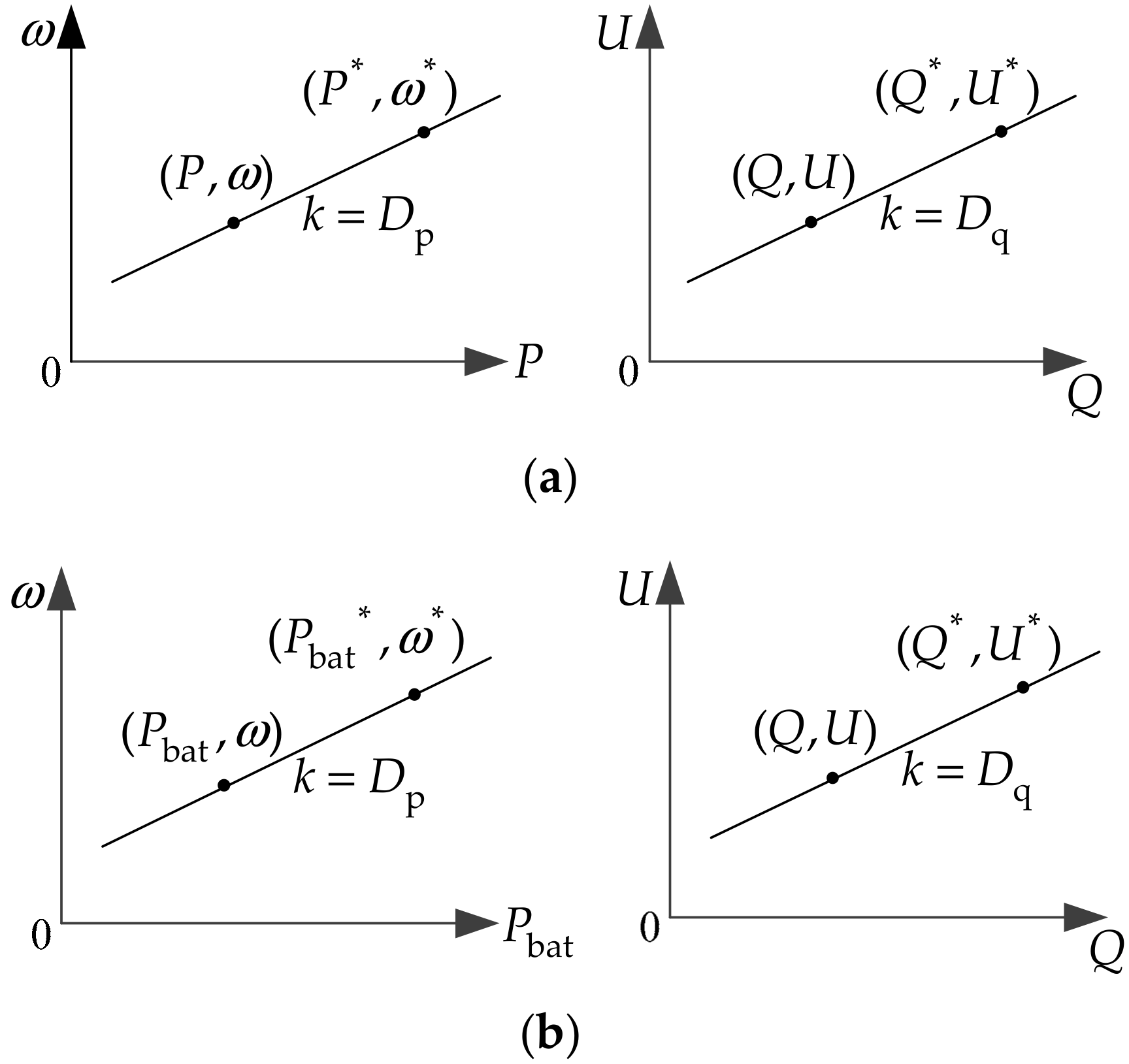
3.1.1. Droop Control Based on Charging Mode
- The rectifier is the capacity to take part in the primary regulation of the voltage and frequency in the case of steady state.
- The off-board charger feeds the power battery in the way of constant-current fast charging.
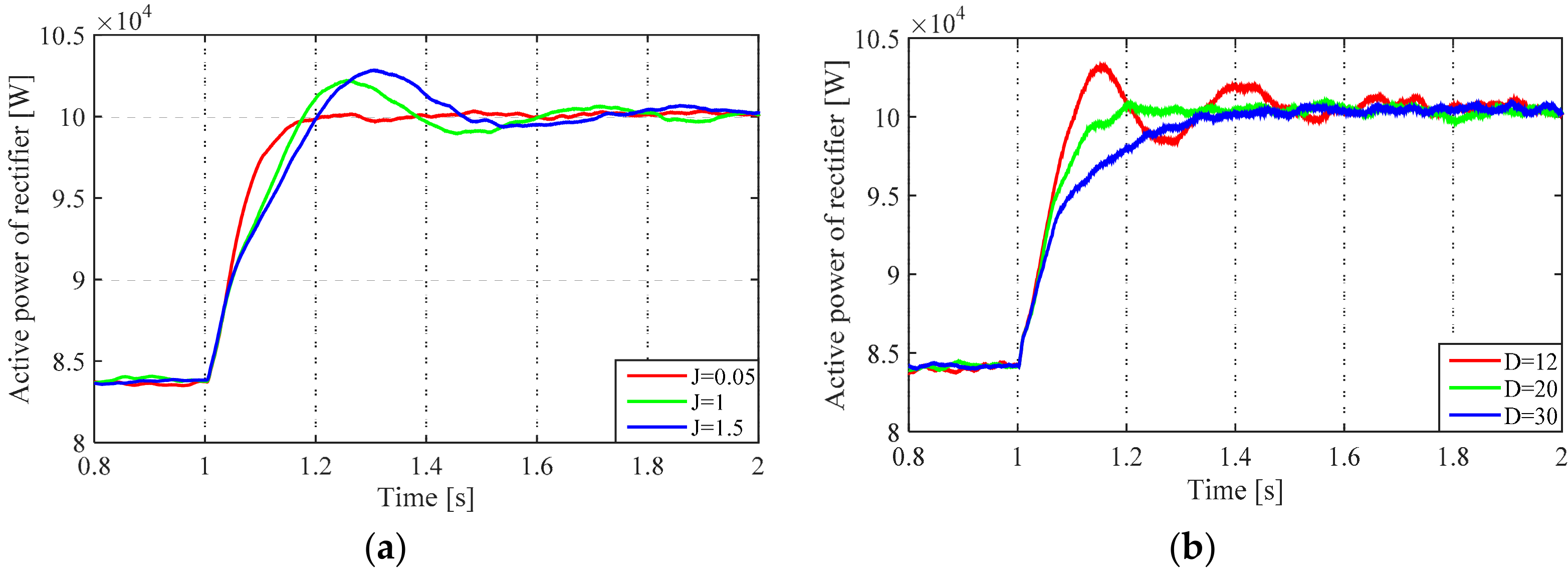
3.1.2. Behaviors of the Inertia and Damping
3.2. Double Closed-Loop Control
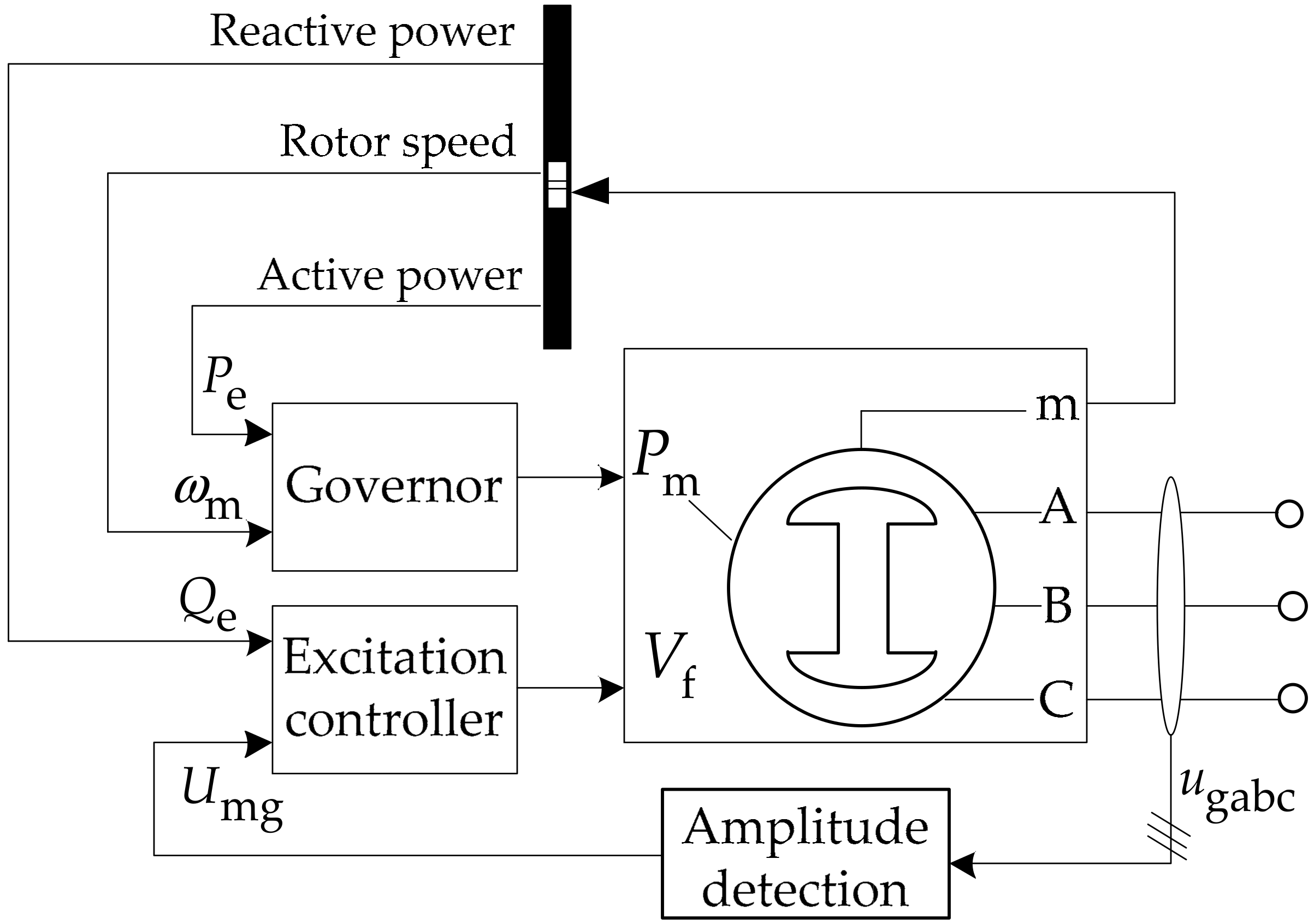
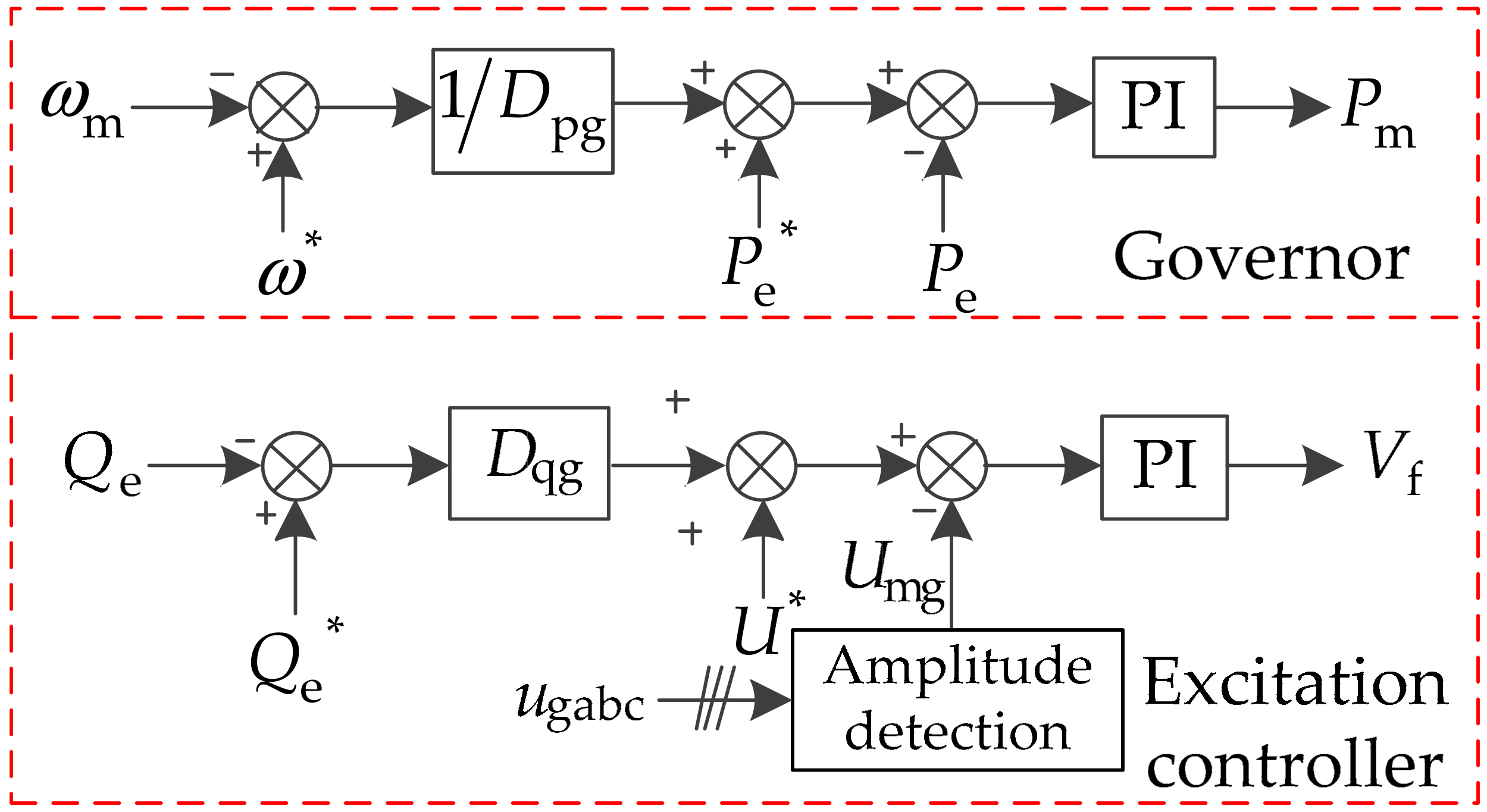
4. Synchronous Grid Control
5. Verification
5.1. Simulation Parameters
5.2. Verification Process
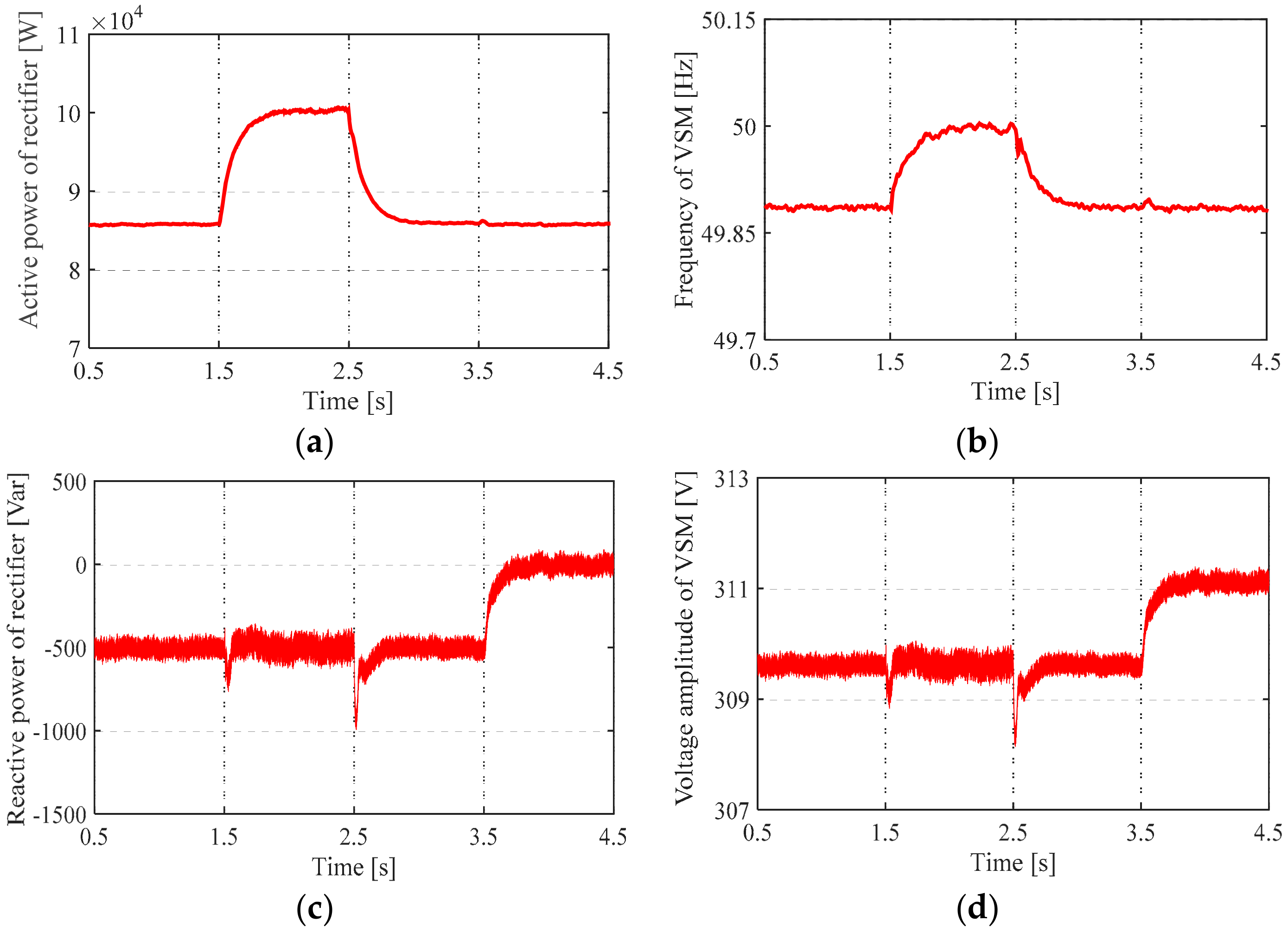
5.2.1. Verification of the Basic Functionalities of the Proposed VSM Control
- ①
- Before 1.5 s, the power grid supplies power to 1 kVar reactive load, power battery I and power battery II.
- ②
- Off-board charger II is out of operation at 1.5 s and connects to the power grid again at 2.5 s.
- ③
- 1 kVar reactive load at the AC interface exits operation at 3.5 s.
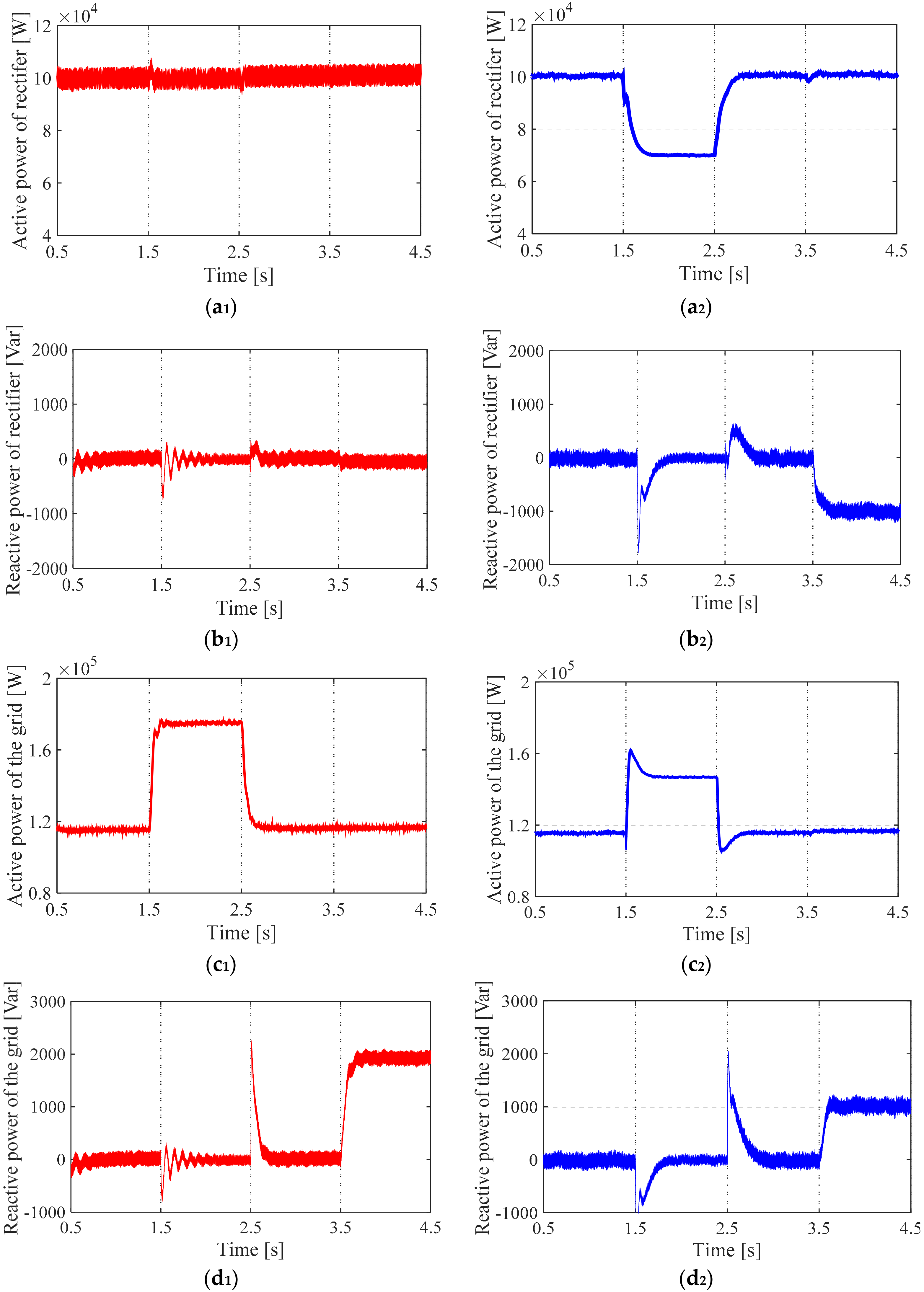
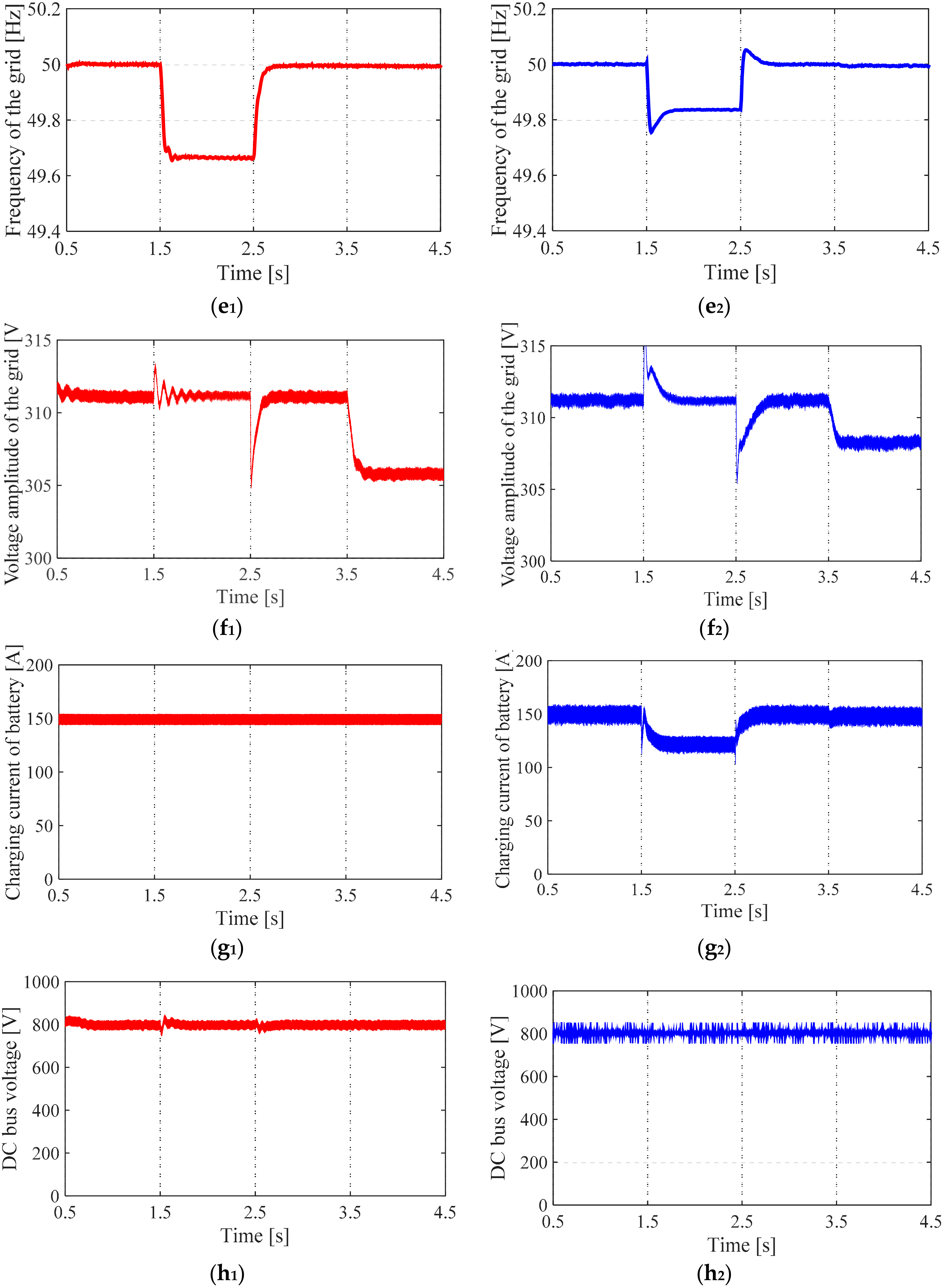
5.2.2. Comparison of Control Schemes
- ①
- The simulation time is 4.5 s. The grid quickly charged the power battery I with a charging current of 150 A through an off-board charger I before 1.5 s.
- ②
- Power battery II is connected to the grid through the off-board charger II at 1.5 s, but the battery II exits operation at 2.5 s. In this time range, the consumed active power of the off-board charger II is 60 kW.
- ③
- 2 kVar reactive load at the AC interface is connected to the grid at 3.5 s.
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Van Roy, J.; Leemput, N.; Geth, F.; Buscher, J.; Salenbien, R.; Driesen, J. Electric vehicle charging in an office building microgrid with distributed energy resources. IEEE Trans. Sustain. Energy. 2014, 5, 1389–1396. [Google Scholar] [CrossRef]
- Soares, F.J.; Rua, D.; Gouveia, C.; Tavares, B.D.; Coelho, A.M.; Lopes, J.A.P. Electric vehicles charging: Management and control strategies. IEEE Ves. Technol. Mag. 2018, 13, 130–139. [Google Scholar] [CrossRef]
- Seljeseth, H.; Taxt, H.; Solvang, T. Measurements of network impact from electric vehicles during slow and fast charging. In Proceedings of the 22nd International Conference and Exhibition on Electricity Distribution (CIRED 2013), Stockholm, Sweden, 10–13 June 2013; pp. 1–4. [Google Scholar]
- Sun, B.; Dragičević, T.; Freijedo, F.D.; Vasquez, J.C.; Guerrero, J.M. A control algorithm for electric vehicle fast charging stations equipped with flywheel energy storage systems. IEEE Trans. Power Electron. 2016, 31, 6674–6685. [Google Scholar] [CrossRef]
- Shi, C.; Tang, Y.; Khaligh, A. A single-phase integrated onboard battery charger using propulsion system for plug-in electric vehicles. IEEE Trans. Veh. Technol. 2017, 66, 10899–10910. [Google Scholar] [CrossRef]
- Shi, R.; Semsar, S.; Lehn, W.P. Constant current fast charging of electric vehicles via a DC grid using a dual-inverter drive. IEEE Trans. Ind. Electron. 2017, 64, 6940–6949. [Google Scholar] [CrossRef]
- Badawy, M.O.; Sozer, Y. Power flow management of a grid tied PV-battery system for electric vehicles charging. IEEE Trans. Ind. Appl. 2017, 53, 1347–1357. [Google Scholar] [CrossRef]
- Nour, M.; Ramadan, H.; Ali, A.; Farkas, C. Impacts of plug-in electric vehicles charging on low voltage distribution network. In Proceedings of the 2018 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 19–21 February 2018; pp. 357–362. [Google Scholar]
- Gray, M.K.; Morsi, W.G. Power quality assessment in distribution systems embedded with plug-in hybrid and battery electric vehicles. IEEE Trans. Power Syst. 2015, 30, 663–671. [Google Scholar] [CrossRef]
- Zhou, N.; Wang, J.; Wang, Q.; Wei, N. Measurement-based harmonic modeling of an electric vehicle charging station using a three-phase uncontrolled rectifier. IEEE Trans. Smart Grid. 2015, 6, 1332–1340. [Google Scholar] [CrossRef]
- Suul, J.A.; D’Arco, S.; Guidi, G. A single-phase virtual synchronous machine for providing vehicle-to-grid services from electric vehicle battery chargers. In Proceedings of the International Electric Vehicle Technology Conference & Automotive Power Electronics—EV-TeC & APE, Yokohama, Japan, 22–24 May 2014; p. 7. [Google Scholar]
- Suul, J.A.; D’Arco, S.; Guidi, G. Virtual synchronous machine-based control of a single-phase bi-directional battery charger for providing vehicle-to-grid services. IEEE Trans. Ind. Appl. 2016, 52, 3234–3244. [Google Scholar] [CrossRef]
- Liu, Q.H.; Lu, S.J. Charging and discharging control strategy based on virtual synchronous machine for electrical vehicles participating in frequency modulation of Microgrid. Autom. Elect Power Syst 2018, accepted. [Google Scholar]
- Jiang, W.; Lv, Z.; Zhong, Q.; Zeng, B.; Li, G. Virtual synchronous motor based control scheme of electric vehicle charger. In Proceedings of the 2014 International Conference on Power System Technology, Chengdu, China, 20–22 October 2014; pp. 2686–2692. [Google Scholar]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electro. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Shen, Y.; Zhao, W.; Chen, Z.; Cai, C. Full-bridge LLC resonant converter with series-parallel connected transformers for electric vehicle on-board charger. IEEE Access 2018, 6, 13490–13500. [Google Scholar] [CrossRef]
- Vu, H.N.; Choi, W. A novel dual full-bridge LLC resonant converter for CC and CV charges of batteries for electric vehicles. IEEE Trans. Ind. Electron. 2018, 65, 2212–2225. [Google Scholar] [CrossRef]
- Varghese, A.S.; Thomas, P.; Varghese, S. An efficient voltage control strategy for fast charging of plug-in electric vehicle. In Proceedings of the 2017 Innovations in Power and Advanced Computing Technologies (i-PACT), Vellore, India, 21–22 April 2017; pp. 1–4. [Google Scholar]
- Zheng, Z.; Wang, K.; Xu, L.; Li, Y. A hybrid cascaded multilevel converter for battery energy management applied in electric vehicles. IEEE Trans. Power Electron. 2014, 29, 3537–3546. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | |
|---|---|---|
| Filter parameters | The series inductance of the filter, L | 3 mH |
| The series resistance of the filter, R | 0.5 Ω | |
| The parallel capacitance of the filter, C | 10 μF | |
| LLC converter parameters | DC side capacitance, C | 1900 μF |
| Resonant inductor, Lr | 0.06 nF | |
| Resonant capacitor, Cr | 34 μF | |
| Excitation inductance, Lm | 0.24 nH | |
| Transformer ratio, T | 1.4 | |
| Power battery parameters | Nominal voltage | 400 V |
| Rated capacity | 100 Ah | |
| System parameters | Reference value of DC voltage, Udc-ref | 800 V |
| Resonant frequency | 35 kHz | |
| Rated frequency | 50 Hz | |
| AC phase voltage effective value | 220 V | |
| Rectifier switching frequency | 10 kHz |
| Parameters | Values | |
|---|---|---|
| VSM control parameters | The charging power reference of the power battery I, Pbat* | 150 Ubat |
| The reactive power reference of the rectifier, Q* | 0 Var | |
| The active droop coefficient of the VSM, Dp | 0.00009 | |
| The reactive droop coefficient of the VSM, Dq | 0.003 | |
| The virtual Inertia of the VSM, J | 0.1 | |
| The virtual damping of the VSM, D | 20 | |
| Grid control parameters | The active power reference of the grid, Pe* | 200 × 103 W |
| The reactive power reference of the grid, Qe* | 0 Var | |
| The active droop coefficient of the grid, Dpg | 0.00002 | |
| The reactive droop coefficient of the grid, Dqg | 0.003 | |
| The virtual Inertia of the grid, Jg | 0.01 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, X.; Li, J.; Zhang, B.; Jia, Z.; Tian, Y.; Zeng, H.; Lv, Z. Virtual Synchronous Motor Based-Control of a Three-Phase Electric Vehicle Off-Board Charger for Providing Fast-Charging Service. Appl. Sci. 2018, 8, 856. https://doi.org/10.3390/app8060856
Yan X, Li J, Zhang B, Jia Z, Tian Y, Zeng H, Lv Z. Virtual Synchronous Motor Based-Control of a Three-Phase Electric Vehicle Off-Board Charger for Providing Fast-Charging Service. Applied Sciences. 2018; 8(6):856. https://doi.org/10.3390/app8060856
Chicago/Turabian StyleYan, Xiangwu, Jiajia Li, Bo Zhang, Zhonghao Jia, Yang Tian, Hui Zeng, and Zhipeng Lv. 2018. "Virtual Synchronous Motor Based-Control of a Three-Phase Electric Vehicle Off-Board Charger for Providing Fast-Charging Service" Applied Sciences 8, no. 6: 856. https://doi.org/10.3390/app8060856