The Optical Barcode Detection and Recognition Method Based on Visible Light Communication Using Machine Learning


Abstract
:1. Introduction
2. Background
2.1. Using a CMOS Sensor in VLC
2.1.1. Rolling Shutter Mechanism
2.1.2. Camera Requirement
2.2. Avoiding Flicker and Keeping the Light White
3. System Principle
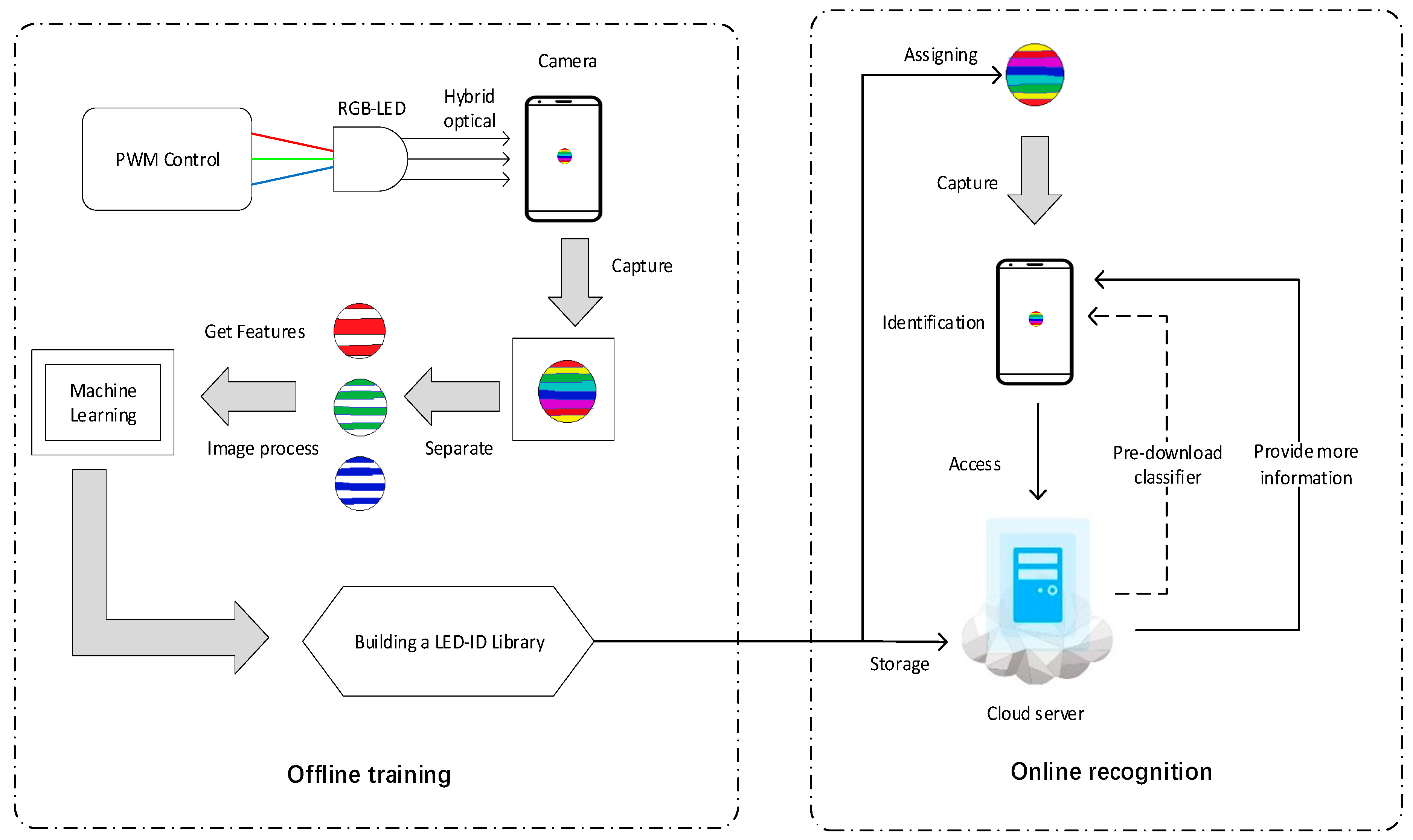
3.1. Method Overview
3.2. LED Modulation
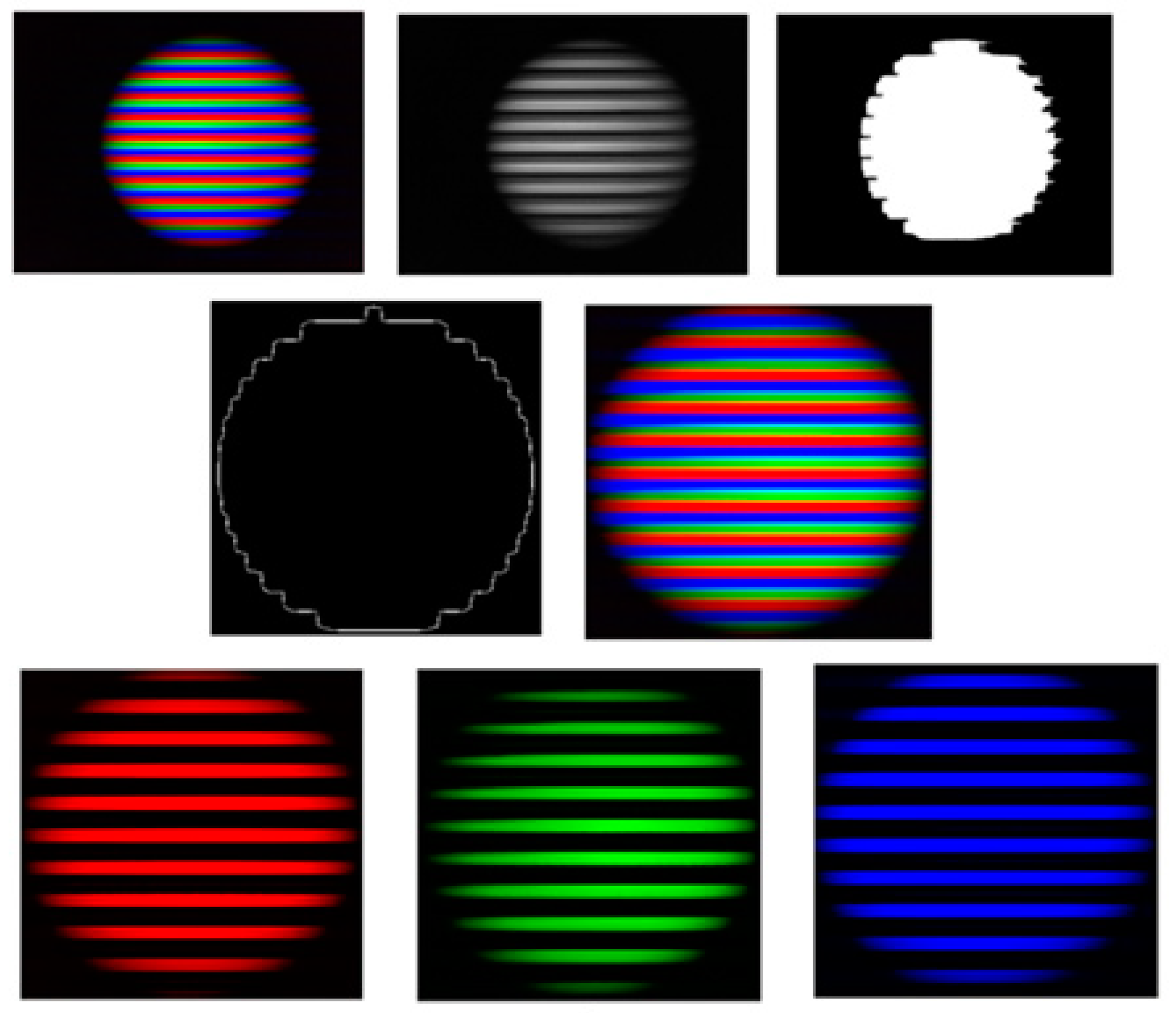
3.3. RGB-LED-ID Feature Extraction and Selection
3.3.1. Step 1: Edge Detection and LED Segmentation
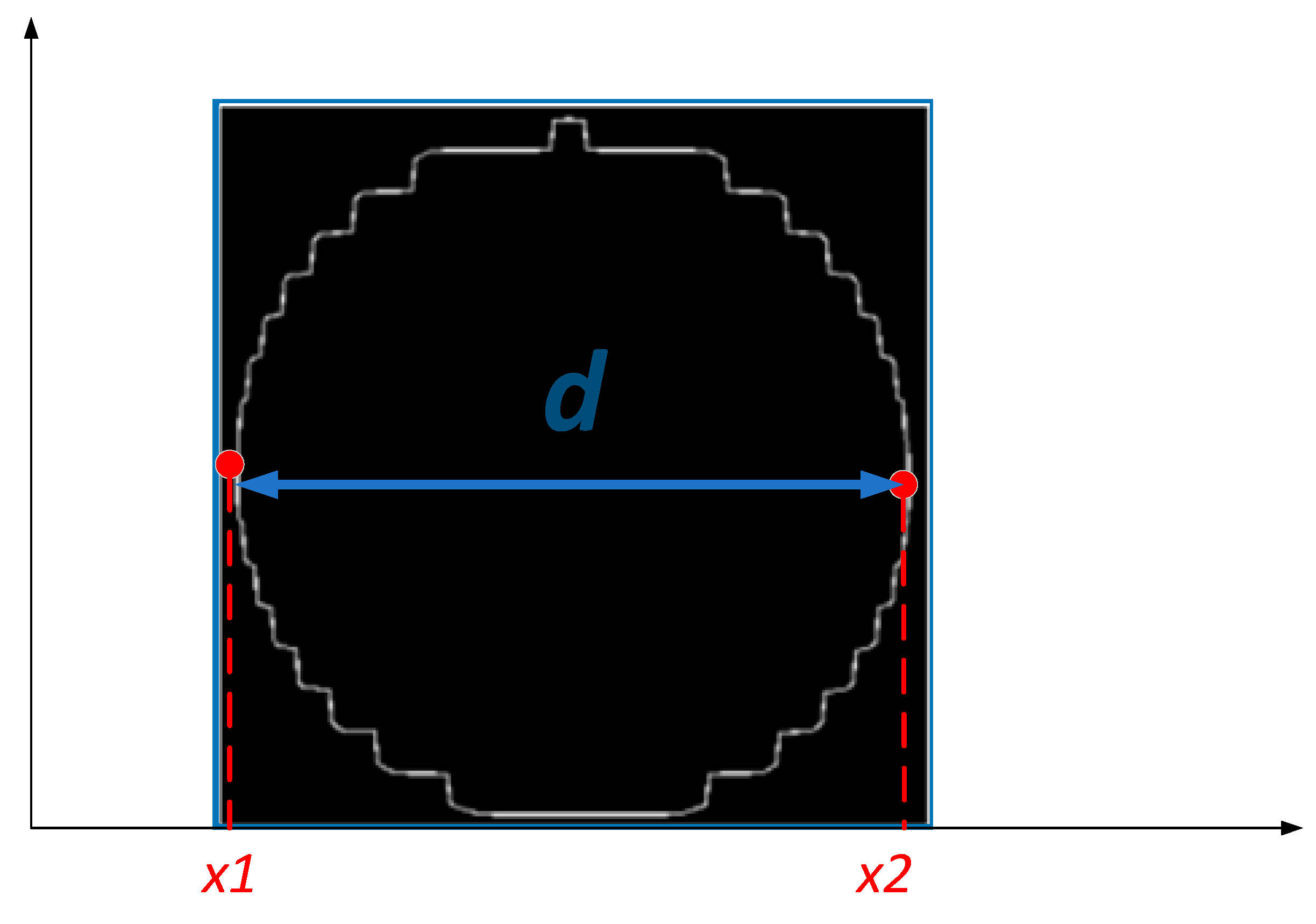
3.3.2. Step 2: Get the Area of the LED Project
3.3.3. Step 3: Get the Duty-Ratio of the Bright Stripe Counting
3.3.4. Step 4: Get the Skewing
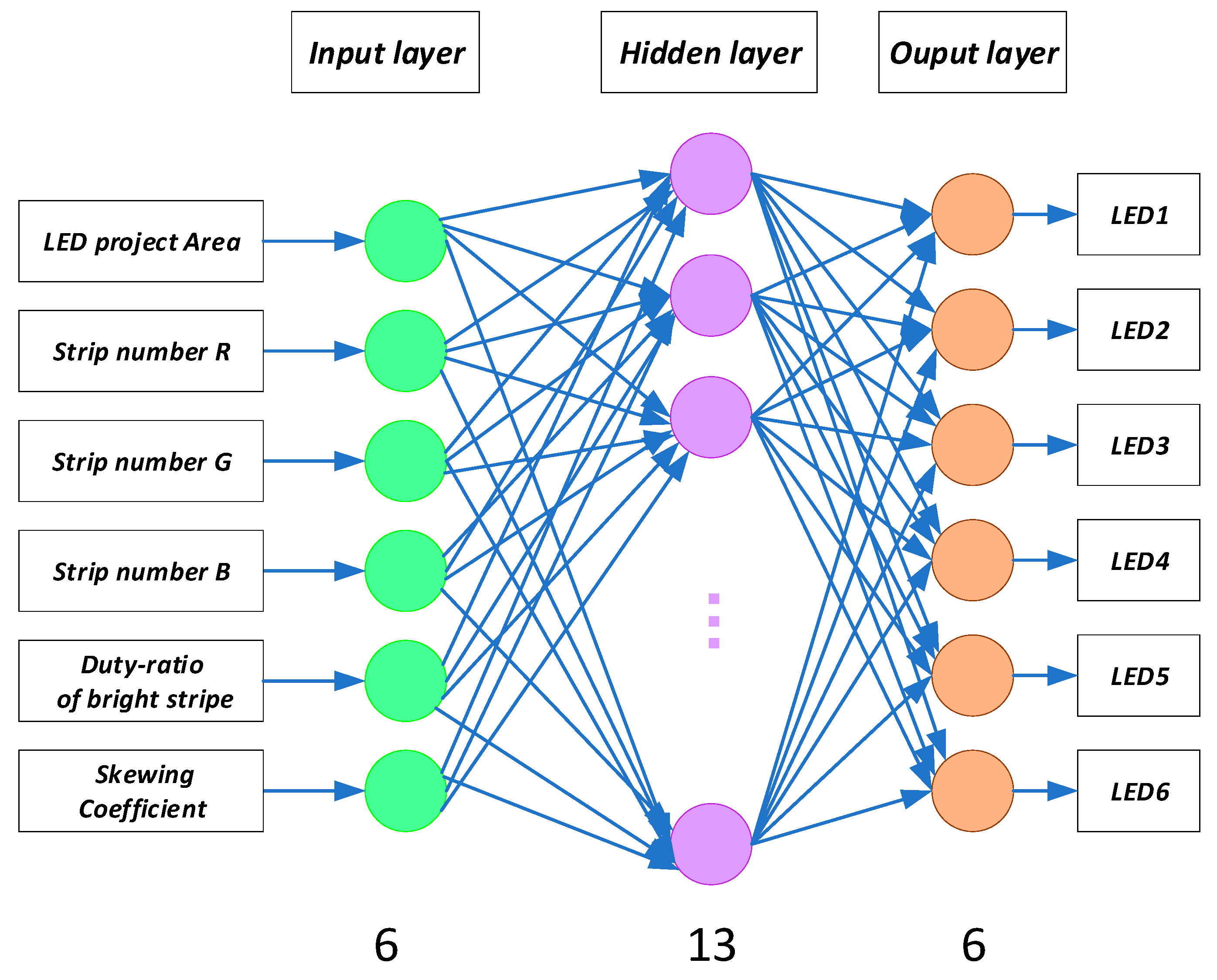
3.4. LED Recognition
Machine Learning
4. Experiment and Analysis
4.1. Frequency and the Bright Stripe’s Duty-Ratio Detection Error Analysis
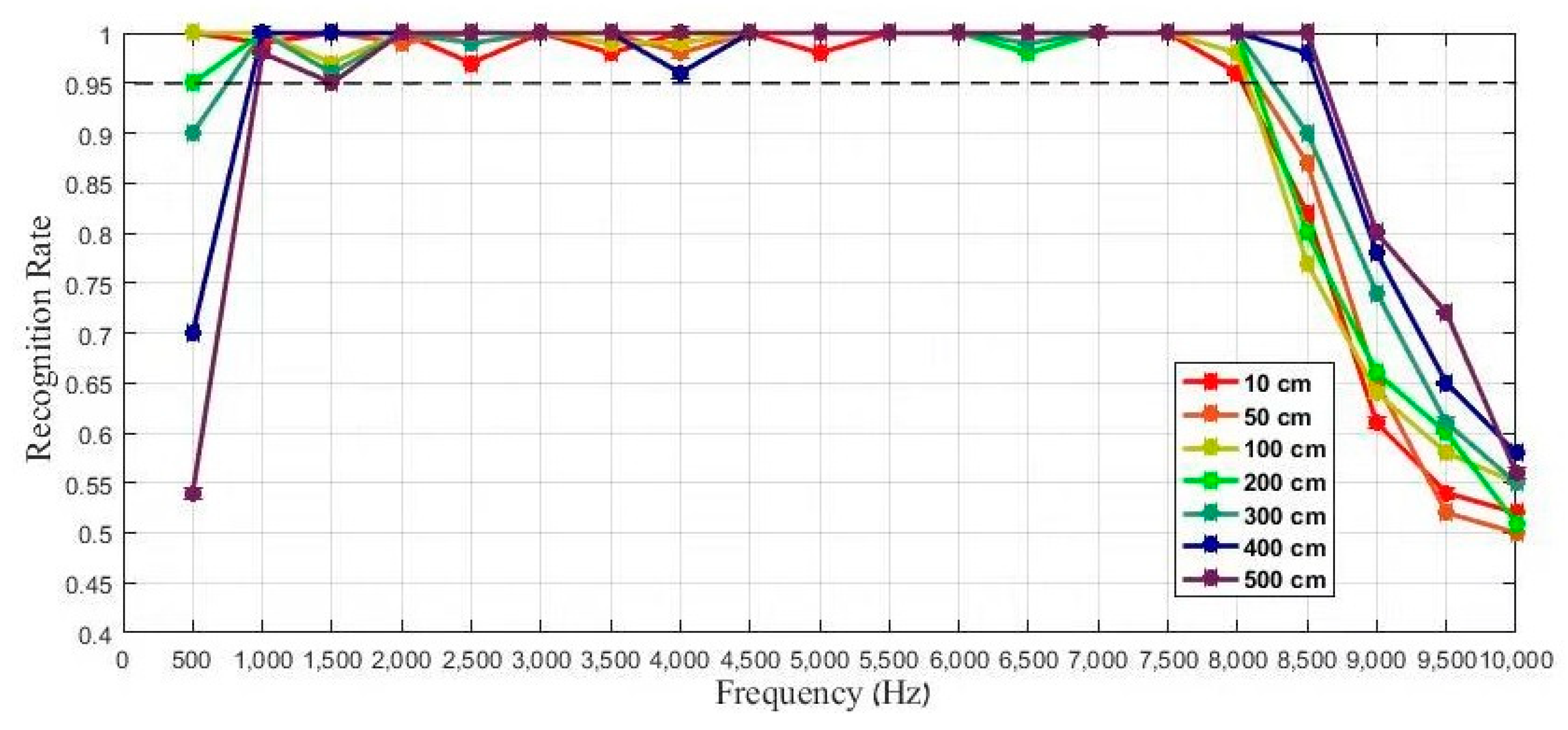
4.2. Frequency Resolution and LED-ID Recognition Analysis
4.3. Skewing Resolution and LED-ID Recognition Analysis
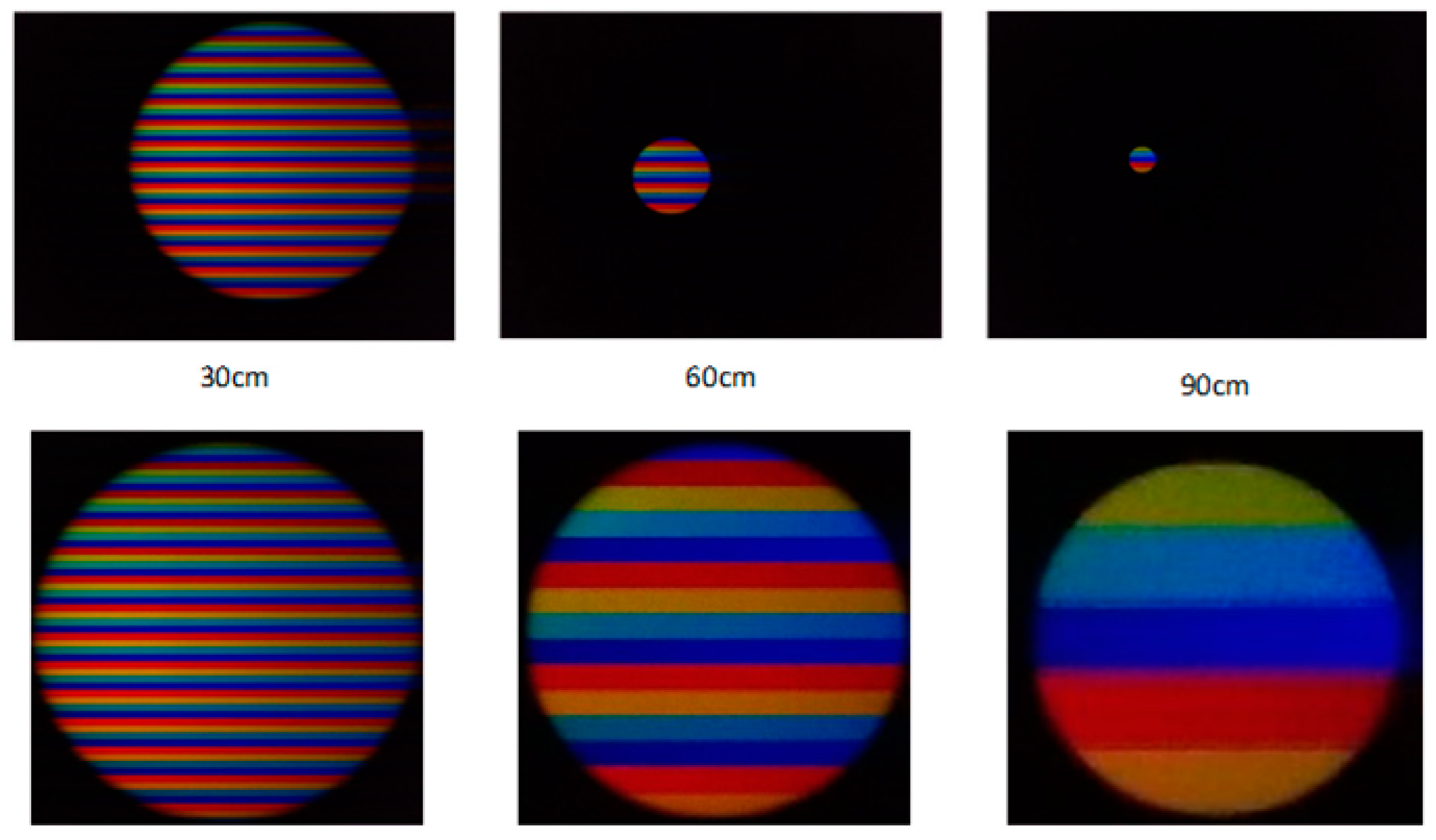
4.4. Comparison Experiment of Recognition Distance with QR Code
4.5. Contrast Experiment with QR Code in Dark Condition
4.6. Comprehensive Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Castillo, A.; Thierer, A.D. Projecting the Growth and Economic Impact of the Internet of Things. Soc. Sci. Electron. Publ. 2015, 39, 40–46. [Google Scholar] [CrossRef]
- Marktscheffel, T.; Gottschlich, W.; Popp, W.; Werli, P.; Fink, S.D.; Bilzhause, A.; de Meer, H. QR code based mutual authentication protocol for Internet of Things. In Proceedings of the World of Wireless, Mobile and Multimedia Networks, Coimbra, Portugal, 21–24 June 2016; pp. 1–6. [Google Scholar]
- Tsiropoulou, E.E.; Gialagkolidis, I.; Vamvakas, P.; Papavassiliou, S. Resource allocation in visible light communication networks: NOMA vs OFDMA transmission techniques. In Proceedings of the International Conference on Ad-Hoc Networks and Wireless, Lille, France, 4–6 July 2016; pp. 32–46. [Google Scholar]
- Singhal, C.; De, S. (Eds.) Resource allocation in next-generation broadband wireless access networks; Springer: Cham, Germany, 2017. [Google Scholar]
- IGI Global, Bykhovsky, Dima, and Shlomi Arnon. Multiple access resource allocation in visible light communication systems. J. Lightw. Technol. 2014, 32, 1594–1600. [Google Scholar] [CrossRef]
- Kim, W.-C.; Bae, C.-S.; Jeon, S.-Y.; Pyun, S.-Y.; Cho, D.-H. Efficient resource allocation for rapid link recovery and visibility in visible-light local area networks. IEEE Trans. Consum. Electron. 2010, 56, 524–531. [Google Scholar] [CrossRef]
- Jovicic, A.; Li, J.; Richardson, T. Visible light communication: Opportunities, challenges and the path to market. IEEE Commun. Mag. 2013, 51, 26–32. [Google Scholar] [CrossRef]
- Karunatilaka, D.; Zafar, F.; Kalavally, V.; Parthiban, R. LED Based Indoor Visible Light Communications: State of the Art. IEEE Commun. Surv. Tutor. 2015, 17, 1649–1678. [Google Scholar] [CrossRef]
- Zheng, D.; Chen, G.; Farrell, J.A. Joint measurement and trajectory recovery in visible light communication. IEEE Trans. Control Syst. Technol. 2017, 25, 247–261. [Google Scholar] [CrossRef]
- Fang, J.; Yang, Z.; Long, S.; Wu, Z.; Zhao, X.; Liang, F.; Jiang, Z.L.; Chen, Z. High-speed indoor navigation system based on visible light and mobile phone. IEEE Photon. J. 2017, 9, 8200711. [Google Scholar] [CrossRef]
- Zhang, B.; Ren, K.; Xing, G.; Fu, X.; Wang, C. SBVLC: Secure barcode-based visible light communication for smartphones. IEEE Trans. Mobile Comput. 2016, 15, 432–446. [Google Scholar] [CrossRef]
- Chen, H.-W.; Wen, S.S.; Liu, Y.; Fu, M.; Weng, Z.C.; Zhang, M. Optical camera communication for mobile payments using an LED panel light. Appl. Opt. 2018, 57, 5288–5294. [Google Scholar] [CrossRef] [PubMed]
- Cai, Y.; Guan, W.; Wu, Y.; Xie, C.; Chen, Y.; Fang, L. Indoor high precision three-dimensional positioning system based on visible light communication using particle swarm optimization. IEEE Photon. J. 2017, 9, 7908120. [Google Scholar] [CrossRef]
- Guan, W.; Wu, Y.; Xie, C.; Chen, H.; Cai, Y.; Chen, Y. High-precision approach to localization scheme of visible light communication based on artificial neural networks and modified genetic algorithms. Opt. Eng. 2017, 56, 106103. [Google Scholar] [CrossRef]
- Guan, W.; Wu, Y.; Xie, C.; Fang, L.; Liu, X.; Chen, Y. Performance analysis and enhancement for visible light communication using CMOS sensors. Opt. Commun. 2018, 410, 531–545. [Google Scholar] [CrossRef]
- Xie, C.; Guan, W.; Wu, X.; Fang, L.; Cai, Y. The LED-ID Detection and Recognition Method based on Visible Light Positioning using Proximity Method. IEEE Photon. J. 2018, 10, 1–16. [Google Scholar] [CrossRef]
- Danakis, C.; Afgani, M.; Povey, G.; Underwood, I.; Haas, H. Using a CMOS camera sensor for visible light communication. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1244–1248. [Google Scholar]
- Liu, Y. Decoding mobile-phone image sensor rolling shutter effect for visible light communications. Opt. Eng. 2016, 55, 016103. [Google Scholar] [CrossRef]
- Chow, C.W.; Shiu, R.J.; Liu, Y.C.; Liu, Y.; Yeh, C.H. Non-flickering 100 m RGB visible light communication transmission based on a CMOS image sensor. Opt. Express 2018, 26, 7079. [Google Scholar] [CrossRef] [PubMed]
- Landis, C. Determinants of the critical flicker-fusion threshold. Physiol. Rev. 1954, 34, 259–286. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.; Yuan, L.; He, Y.; Luo, S. An improved SVM classifier based on double chains quantum genetic algorithm and its application in analogue circuit diagnosis. Neurocomputing 2016, 211, 202–211. [Google Scholar] [CrossRef]
- Liu, Y. The BP neural network classification method under Linex loss function and the application to face recognition. In Proceedings of the International Conference on Computer and Automation Engineering, Singapore, 26–28 February 2010; pp. 592–595. [Google Scholar]
- Hu, P.; Pathak, P.H.; Feng, X.; Fu, H.; Mohapatra, P. ColorBars: Increasing data rate of LED-to-camera communication using color shift keying. In Proceedings of the 11th ACM Conference on Emerging Networking Experiments and Technologies, Heidelberg, Germany, 1–4 December 2015; pp. 1–13. [Google Scholar]
- Neild, A.; Armstrong, J.; Wang, T.Q.; Armstrong, J. Position Accuracy of Time-of-Arrival Based Ranging Using Visible Light with Application in, Indoor Localization Systems. J. Lightw. Technol. 2013, 31, 3302–3308. [Google Scholar]
- Sertthin, C.; Tsuji, E.; Nakagawa, M.; Kuwano, S.; Watanabe, K. A Switching Estimated Receiver Position Scheme for Visible Light Based Indoor Positioning System. In Proceedings of the International Symposium on Wireless Pervasive Computing, Melbourne, VIC, Australia, 11–13 February 2009; pp. 1–5. [Google Scholar]
- Fu, M.; Zhu, W.; Le, Z.; Manko, D. Improved visible light communication positioning algorithm based on image sensor tilting at room corners. IET Commun. 2018, 12, 1201–1206. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Data | Classification | |||||
|---|---|---|---|---|---|---|
| Area (Pixel2) | Num R | Num G | Num B | Du-Ra (%) | Skewing | |
| 290,333 | 2 | 2 | 2 | 0.50000 | 0.357542 | LED1 |
| 1,089,884 | 5 | 4 | 4 | 0.50086 | 0.352153 | |
| 2,949,832 | 7 | 7 | 7 | 0.50184 | 0.347941 | |
| 281,563 | 4 | 4 | 4 | 0.50056 | 0.348947 | LED2 |
| 1,205,794 | 9 | 10 | 8 | 0.50149 | 0.349574 | |
| 3,048,741 | 18 | 19 | 19 | 0.50045 | 0.358974 | |
| 269,702 | 2 | 2 | 3 | 0.25005 | 0.350205 | LED3 |
| 1,075,131 | 4 | 4 | 6 | 0.25086 | 0.354964 | |
| 3,056,484 | 7 | 7 | 8 | 0.25464 | 0.358711 | |
| 298,024 | 2 | 2 | 2 | 0.50058 | 0.684783 | LED4 |
| 1,270,761 | 4 | 4 | 5 | 0.50264 | 0.676787 | |
| 3,218,487 | 7 | 7 | 7 | 0.50484 | 0.673067 | |
| 307,778 | 9 | 4 | 2 | 0.50154 | 0 | LED5 |
| 950,331 | 16 | 8 | 4 | 0.50156 | 0 | |
| 3,166,775 | 29 | 14 | 8 | 0.51899 | 0 | |
| 266,033 | 7 | 4 | 3 | 0.50294 | 0 | LED6 |
| 1,027,878 | 13 | 11 | 7 | 0.50154 | 0 | |
| 2,853,222 | 20 | 16 | 10 | 0.50000 | 0 | |
| Parameter | Value |
|---|---|
| The focal length (mm) | 4.25 |
| Aperture | F1.7 |
| Resolution | 4032 × 2448 |
| Exposure time (s) | 1/28,310 |
| ISO | 100 |
| The diameter of the LED downlight (cm) | 6 |
| The power of each LED (W) | 9 |
| Current of each LED (mA) | 85 |
| Class | Frequency (Hz) | Skewing Coefficient (°) | Distance (cm) | Duty-Ratio (%) |
|---|---|---|---|---|
| 1 | 500 | 0.25 | 20 | 25 |
| 2 | 1000 | 0.25 | 40 | 25 |
| 3 | 2000 | 0.25 | 60 | 25 |
| 4 | 3000 | 0.25 | 80 | 25 |
| 5 | 4000 | 0.35 | 100 | 50 |
| 6 | 5000 | 0.35 | 120 | 50 |
| 7 | 6000 | 0.35 | 140 | 50 |
| 8 | 7000 | 0.35 | 160 | 50 |
| 9 | 8000 | 0.35 | 180 | 50 |
| 10 | 1000 | 0.35 | 200 | 50 |
| 11 | 1000 | 0.5 | 20 | 50 |
| 12 | 1000 | 0.5 | 20 | 50 |
| 13 | 1000 | 0.5 | 20 | 50 |
| 14 | 1000 | 0.75 | 20 | 50 |
| 15 | 1000 | 0.75 | 20 | 75 |
| 16 | 1000 | 0.75 | 100 | 75 |
| 17 | 1000 | 0.75 | 100 | 75 |
| 18 | 1000 | 1 | 100 | 75 |
| 19 | 1000 | 1 | 100 | 75 |
| 20 | 1000 | 1 | 100 | 75 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Guan, W. The Optical Barcode Detection and Recognition Method Based on Visible Light Communication Using Machine Learning. Appl. Sci. 2018, 8, 2425. https://doi.org/10.3390/app8122425
Li J, Guan W. The Optical Barcode Detection and Recognition Method Based on Visible Light Communication Using Machine Learning. Applied Sciences. 2018; 8(12):2425. https://doi.org/10.3390/app8122425
Chicago/Turabian StyleLi, Jingyi, and Weipeng Guan. 2018. "The Optical Barcode Detection and Recognition Method Based on Visible Light Communication Using Machine Learning" Applied Sciences 8, no. 12: 2425. https://doi.org/10.3390/app8122425