A Novel Approach for a Inverse Kinematics Solution of a Redundant Manipulator


 ,
,
Abstract
:1. Introduction
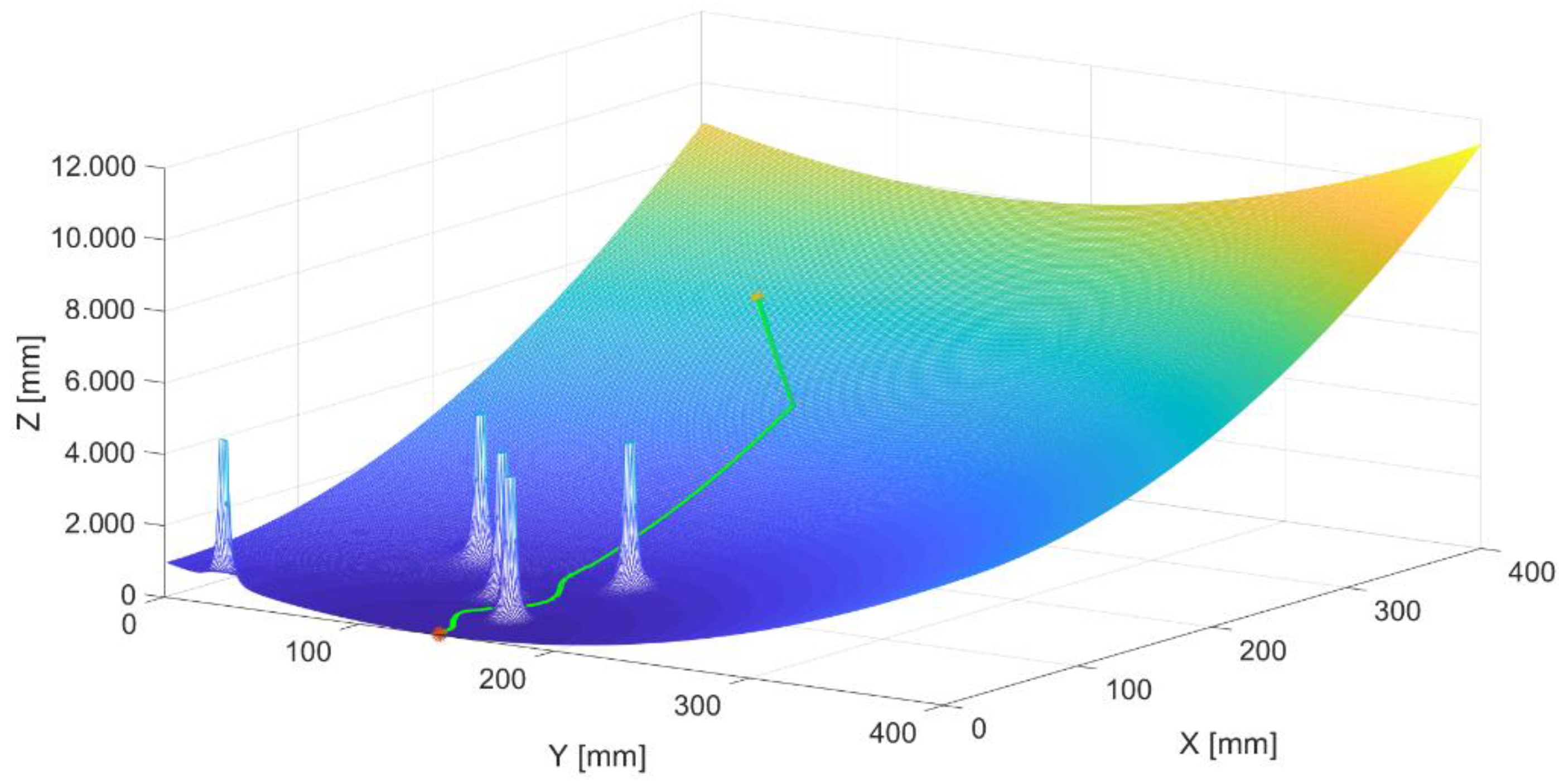
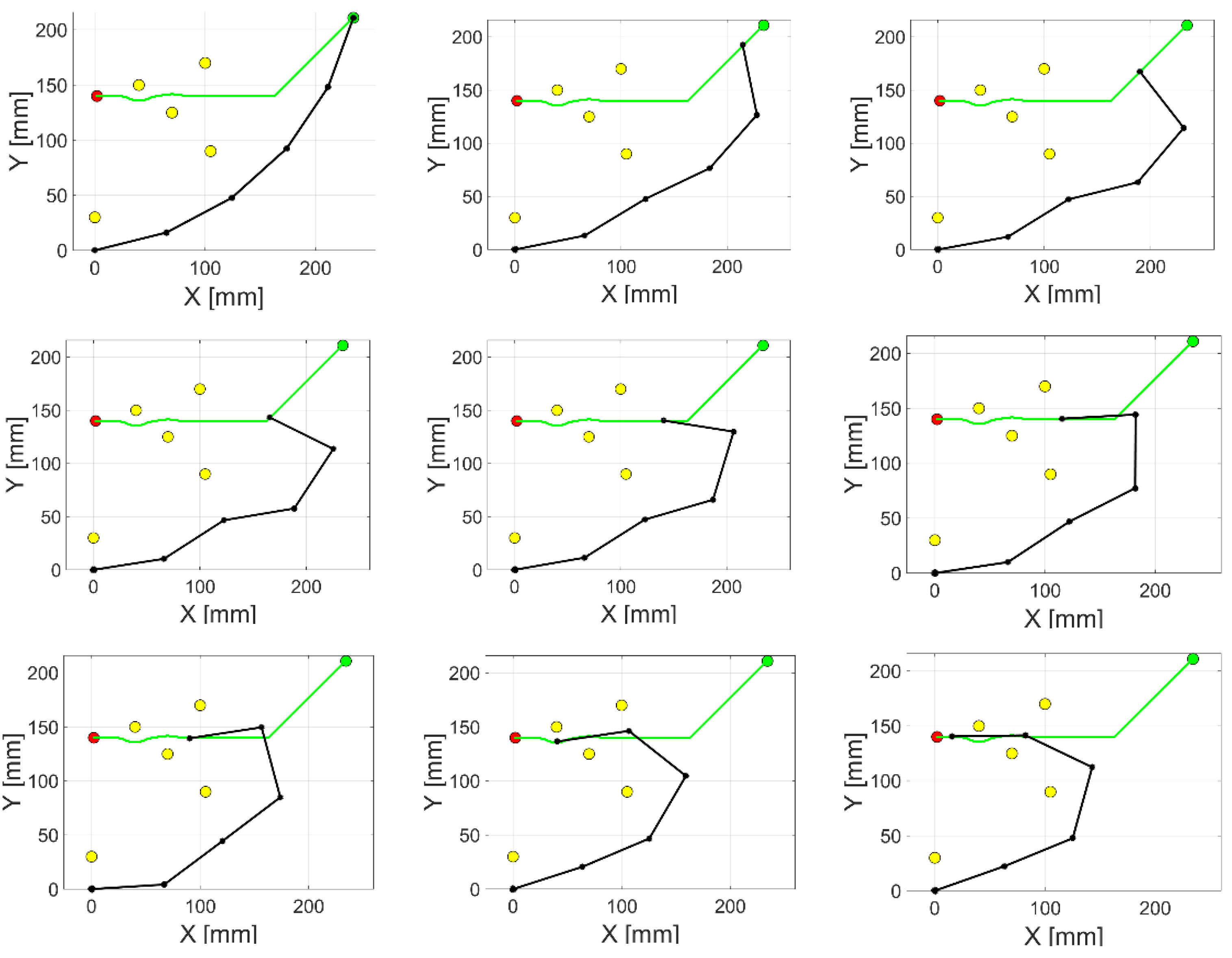
2. Path Planning Task for End-Effector
Potential Field Method
| Algorithm 1 Generation of Attractive and Repulsive Fields |
| 1: Determination (scan) of the obstacles |
| 2: - > zero matrix, |
| 3: - > unit matrix, |
| 4: FOR x = x_min: x_max |
| 5: FOR y = y_min: y_max |
| 6: Computation of |
| 7: FOR obstacle = 1: number_of_obstacles |
| 8: IF |
| 9: |
| 10: ELSE |
| 11: |
| 12: END IF |
| 13: END FOR |
| 14: END FOR |
| 15: END FOR |
| 16: |
| Algorithm 2 Path Planning |
| 1: x_start = x_position_of_end-effector, |
| y_start = y_position_of_end-effector |
| 2: flag = non zero value |
| 3: WHILE flag ≠ 0 |
| 4: i = i + 1 |
| 5: P[i,1] = x_start, P[i,2] = y_start |
| 6: flag = [x_start, y_start] |
| 7: U_temp[1] = [x_start-1, y_start] |
| 8: U_temp[2] = [x_start+1, y_start] |
| 9: U_temp[3] = [x_start, y_start-1] |
| 10: U_temp[4] = [x_start, y_start+1] |
| 11: U_temp[5] = [x_start-1, y_start-1] |
| 12: U_temp[6] = [x_start-1, y_start+1] |
| 13: U_temp[7] = [x_start+1, y_start-1] |
| 14: U_temp[8] = [x_start+1, y_start+1] |
| 15: k = position_of_min_value_of_U_temp |
| 16: SWITCH (k) |
| 17: 1:x_start = x_start-1, y_start = y_start |
| 18: 2:x_start = x_start+1, y_start = y_start |
| 19: 3:x_start = x_start, y_start = y_start-1 |
| 20: 4:x_start = x_start, y_start = y_start+1 |
| 21: 5:x_start = x_start-1, y_start = y_start-1 |
| 22: 6:x_start = x_start-1, y_start = y_start+1 |
| 23: 7:x_start = x_start+1, y_start = y_start-1 |
| 24: 8:x_start = x_start+1, y_start = y_start+1 |
| 25: END SWITCH |
| 26: END WHILE |
3. Inverse Kinematic Model and Computing Algorithm
3.1. Kinematic Singularities Avoidance Task
3.2. Joint Limit Avoidance Task
3.3. Obstacle Avoidance Task
3.4. Final Inverse Kinematic Model
| Algorithm 3 Inverse kinematic model |
| 1: CYCLE WHILE 1 |
| 2: Determination of new required vector from the matrix of planned path |
| 3: CYCLE WHILE 2 |
| 4: Computation of Jacobian matrix J (damped least squares method) |
| 5: Determination of actual end-effector position in the task space with actual generalized variables |
| 6: Computation of general equation |
| 7: |
| 8: |
| 9: IF THEN END CYCLE WHILE 2 ELSE CYCLE WHILE 2 continues END IF |
| 10: END CYCLE WHILE 2 |
| 11: END CYCLE WHILE 1 |
3.5. A New Algorithm of Inverse Kinematic Model—Acceleration of Computing
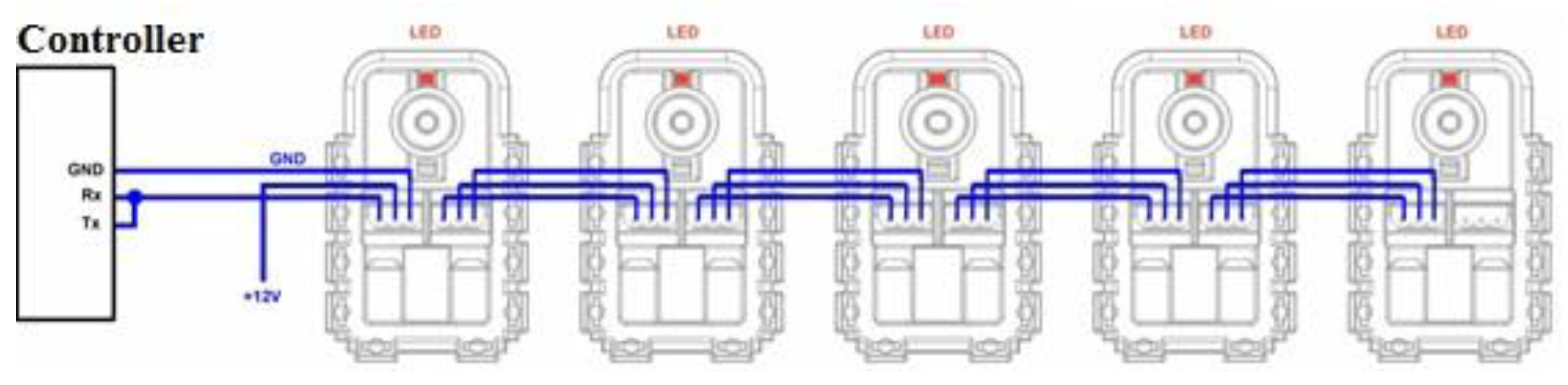
4. Low Level Control
| Algorithm 4 Low level control |
| 1: CYCLE WHILE 1 |
| 2: Find out positions of servomechanisms (UART 1) |
| 3: Send positions to PC (UART 2) |
| 4: CYCLE WHILE 2 |
| 5: wait for all required positions from PC |
| 6: END CYCLE WHILE 2 |
| 7: Move servomechanisms to required positions |
| 8: END CYCLE WHILE 1 |
| Algorithm 5 New algorithm for inverse kinematic model |
| 1: CYCLE WHILE 1 |
| 2: Determination of new required vector from the matrix of planned path |
| 3: CYCLE WHILE 2 |
| 4: increase counter |
| 5: IF counter > max. admissible value |
| 6: decrease priority of chosen task by chosen function |
| 7: counter = 0 |
| 8: END IF |
| 9: Computation of Jacobian matrix J (damped least squares method) |
| 10: Determination of actual end-effector position in the task space with actual generalized variables |
| 11: Computation of general equation |
| 12: |
| 13: |
| 14: IF THEN |
| 15: END CYCLE WHILE 2 |
| 16: ELSE |
| 17: CYCLE WHILE 2 continues |
| 18: END IF |
| 19: END CYCLE WHILE 2 |
| 20: IF counter < min. admissible value |
| 21: increase priority of chosen task by chosen function |
| 22: counter = 0 |
| 23: END IF |
| 24: counter = 0 |
| 25: END CYCLE WHILE 1 |
5. Numerical Computing and Results
5.1. Case Study 1
5.2. Case Study 2
5.3. Comparison with Other Methods
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Chiaverini, S.; Oriolo, G.; Walker, I.D. Kinematically Redundant Manipulators; Springer: Berlin/Heidelberg, Germany, 2008; pp. 245–268. [Google Scholar]
- Wei, Q.; Yang, C.; Fan, W.; Zhao, Y. Design of Demonstration-Driven Assembling Manipulator. Appl. Sci. 2018, 8. [Google Scholar] [CrossRef]
- Kilin, A.; Bozek, P.; Karavaev, Y.; Klekovkin, A.; Shestakov, V. Experimental investigations of a highly maneuverable mobile omniwheel robot. Int. J. Adv. Robot. Syst. 2017, 14. [Google Scholar] [CrossRef]
- Siciliano, B. Kinematic Control of Redundant Robot Manipulators: A Tutorial. J. Intell. Robot. Syst. 1990, 3, 201–212. [Google Scholar] [CrossRef]
- Wang, J.; Li, Y.; Zhao, X. Inverse Kinematics and Control of a 7-DOF Redundant Manipulator Based on the Closed-Loop Algorithm. Int. J. Adv. Robot. Syst. 2010, 7, 1–10. [Google Scholar] [CrossRef]
- Flacco, F.; De Luca, A.; Khatib, O. Motion control of redundant robots under joint constraints: Saturation in the null space. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 285–292. [Google Scholar]
- Flacco, F.; De Luca, A. Discrete-time redundancy resolution at the velocity level with acceleration/torque optimization properties. Robot. Auton. Syst. 2015, 70, 191–201. [Google Scholar] [CrossRef]
- Liegeois, A. Automatic supervisory and control of the configuration and behavior of multibody and mechanisms. IEEE Trans. Syst. Man Cybern. 1977, 12, 868–871. [Google Scholar] [CrossRef]
- Chaumette, F.; Marchand, R. A redundancy-based iterative approach for avoiding joint limits: Application to visual servoing. IEEE Trans. Robot. Autom. 2001, 17, 719–730. [Google Scholar] [CrossRef]
- Konstantinov, M.S.; Markov, M.D.; Nencheu, D.N. Kinematic control of redundant manipulators. In Proceedings of the 11th Znt. Symposium on Industrial Robots, Tokyo, Japan, 7–9 October 1981; pp. 561–568. [Google Scholar] [CrossRef]
- Whitney, D.E. The mathematics of coordinated control of prosthetic arms and manipulators. ASME J. Dyn. Syst. Meas. Cont. 1972, 94, 303–309. [Google Scholar] [CrossRef]
- Hollerbach, J.M.; Suh, K.C. Redundancy resolution of manipulators through torque optimization. IEEE J. Robot. Autom. 1987, 3, 1016–1021. [Google Scholar] [CrossRef]
- RunBin, C.; YangZheng, C.; Lin, L.; Jian, W.; Xu, M.H. Inverse Kinematics of a New Quadruped Robot Control Method. Int. J. Adv. Robot. Syst. 2013, 10. [Google Scholar] [CrossRef]
- Whitney, D.E. Resolved Motion Rate Control of Manipulators and Human Prostheses. IEEE Trans. Man-Mach. Syst. 1969, 10, 47–53. [Google Scholar] [CrossRef]
- Chan, T.F.; Dubey, R.V. A Weighted Least-Norm Solution Based Scheme for Avoiding Joint Limits for Redundant Joint Manipulators. IEEE Trans. Robot. Autom. 1995. [Google Scholar] [CrossRef]
- Huang, S.; Peng, Y.; Wei, W.; Xiang, J. Clamping weighted least-norm method for the manipulator kinematic control with constraint. Int. J. Cont. 2016, 89, 2240–2249. [Google Scholar] [CrossRef]
- Chiaverini, S. Singularity-Robust Task-Priority Redundancy Resolution for Real-Time Kinematic Control of Robot Manipulators. IEEE Trans. Robot. Autom. 1997, 13, 398–410. [Google Scholar] [CrossRef]
- Park, J.; Choi, Y.; Chung, W.K.; Youm, Y. Multiple Tasks Kinematics Using Weighted Pseudo-Inverse for Kinematically Redundant Manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001. [Google Scholar]
- Lee, J.; Mansard, N.; Park, J. Intermediate Desired Value Approach for Task Transition of Robots in Kinematic Control. IEEE Trans. Robot. 2012, 28, 1260–1277. [Google Scholar] [CrossRef]
- Zlajpah, L.; Nemec, B. Kinematic control algorithms for on-line obstacle avoidance for redundant manipulators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; pp. 1898–1903. [Google Scholar] [CrossRef]
- Maciejewski, A.A.; Klein, C.A. Obstacle Avoidance for Kinematically Redundant Manipulators in Dynamically Varying Environments. Int. J. Robot. Res. 1985, 4, 109–117. [Google Scholar] [CrossRef] [Green Version]
- Mansard, N.; Khatib, O.; Kheddar, A. A Unified Approach to Integrate Unilateral Constraints in the Stack of Tasks. IEEE Trans. Robot. 2009, 25, 670–685. [Google Scholar] [CrossRef]
- Kanoun, O.; Lamiraux, F.; Wieber, P.B. Kinematic control of redundant manipulators: Generalizing the task priority framework to inequality tasks. IEEE Trans. Robot. 2011, 27, 785–792. [Google Scholar] [CrossRef]
- Duchoň, F.; Babinec, A.; Kajan, M.; Beňo, P.; Florek, M.; Fico, T.; Jurišica, L. Path planning with modified a star algorithm for a mobile robot. Procedia Eng. 2014, 96, 59–69. [Google Scholar] [CrossRef]
- Montiel, O.; Sepúlveda, R.; Orozco-Rosas, U. Optimal Path Planning Generation for Mobile Robots using Parallel Evolutionary Artificial Potential Field. J. Intell. Robot. Syst. 2015, 79. [Google Scholar] [CrossRef]
- Cosfo, F.A.; Padilla Castaneda, M.A. Autonomous Robot Navigation using Adaptive Potential Fields. Math. Comp. Model. 2004, 40. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Márquez-Sánchez, C.; Carrizosa-Corral, F.; Hernández-Guzmán, V.M.; García-Sánchez, J.R.; Taud, H.; Marciano-Melchor, M.; Álvarez-Cedillo, J.A. Obstacle Avoidance Task for a Wheeled Mobile Robot—A Matlab Simulink Based Didactic Application. Intech 2014. [Google Scholar] [CrossRef]
- Žlajpah, L.; Petrič, T. Obstacle Avoidance for Redundant Manipulators as Control Problem, Serial and Parallel Robot Manipulators—Kinematics, Dynamics, Control and Optimization. Intech 2012. [Google Scholar] [CrossRef]
- Baerlocher, P.; Boulic, R. An inverse kinematics architecture enforcing an arbitrary number of strict priority levels. Vis. Comput. 2004, 20, 402–417. [Google Scholar] [CrossRef]
- Buss, S.R. Introduction to Inverse Kinematics with Jacobian Transpose, Pseudoinverse and Damped Least Squares methods. IEEE Trans. Robot. Autom. 2004, 17, 1–19. [Google Scholar]
- Nakamura, Y.; Hanafusa, H. Inverse kinematics solutions with singularity robustness for robot manipulator control. J. Dyn. Syst. Meas. Cont. 1986, 108, 163–171. [Google Scholar] [CrossRef]
- Wampler, C.W. Manipulator inverse kinematic solutions based on vector formulations and damped least squares methods. IEEE Trans. Syst. Man Cybern. 1986, 16, 93–101. [Google Scholar] [CrossRef]
- Fahimi, F. Autonomous Robots: Modeling, Path Planning, and Control; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 978-0-387-09537-0. [Google Scholar]
- Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Passive and active vibrations allow self-organization in large-scale electromechanical systems. Int. J. Bifurc. Chaos 2016, 26. [Google Scholar] [CrossRef]
- Koniar, D.; Stofan, S.; Hargas, L.; Hrianka, M.; Simonova, A. Hardware conditioning in process of high speed imaging. Adv. Electr. Electron. Eng. 2012, 13, 567–574. [Google Scholar] [CrossRef]
- Liegeois, A. Automatic Supervisory Control of Configuration and Behavior of Multibody Mechanism. IEEE Trans. Syst. Man Cybern. 1977, 7, 868–871. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Computation Time (s)—5 Links | Computation Time (s)—20 Links |
|---|---|---|
| FPS | 0.99 | 45.51 |
| WLN | 1.11 | 49.38 |
| GGPM | 19.15 | 92.62 |
| CLIK | 18.21 | 52.14 |
| Method | Computation Time (s)—5 Links | Computation Time (s)—20 Links |
|---|---|---|
| FPS | 1.24 | 44.54 |
| WLN | 1.57 | 49.61 |
| GGPM | 19.94 | Failure |
| CLIK | 18.39 | Failure |
| Method | Computation Time (s)—5 Links | Computation Time (s)—20 Links |
|---|---|---|
| FPS | 1.29 | 45.52 |
| WLN | 1.82 | 69.96 |
| GGPM | 28.80 | Failure |
| CLIK | 26.79 | Failure |
| Method | Computation Time (s)—5 Links | Computation Time (s)—20 Links |
|---|---|---|
| FPS | 1.51 | 50.61 |
| WLN | 2.41 | 140.79 |
| GGPM | 31.09 | Failure |
| CLIK | 28.72 | Failure |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kelemen, M.; Virgala, I.; Lipták, T.; Miková, Ľ.; Filakovský, F.; Bulej, V. A Novel Approach for a Inverse Kinematics Solution of a Redundant Manipulator. Appl. Sci. 2018, 8, 2229. https://doi.org/10.3390/app8112229
Kelemen M, Virgala I, Lipták T, Miková Ľ, Filakovský F, Bulej V. A Novel Approach for a Inverse Kinematics Solution of a Redundant Manipulator. Applied Sciences. 2018; 8(11):2229. https://doi.org/10.3390/app8112229
Chicago/Turabian StyleKelemen, Michal, Ivan Virgala, Tomáš Lipták, Ľubica Miková, Filip Filakovský, and Vladimír Bulej. 2018. "A Novel Approach for a Inverse Kinematics Solution of a Redundant Manipulator" Applied Sciences 8, no. 11: 2229. https://doi.org/10.3390/app8112229