
The Development of an Optimal Control Strategy for a Series Hydraulic Hybrid Vehicle

Abstract
:1. Introduction
2. System Configuration and Modeling
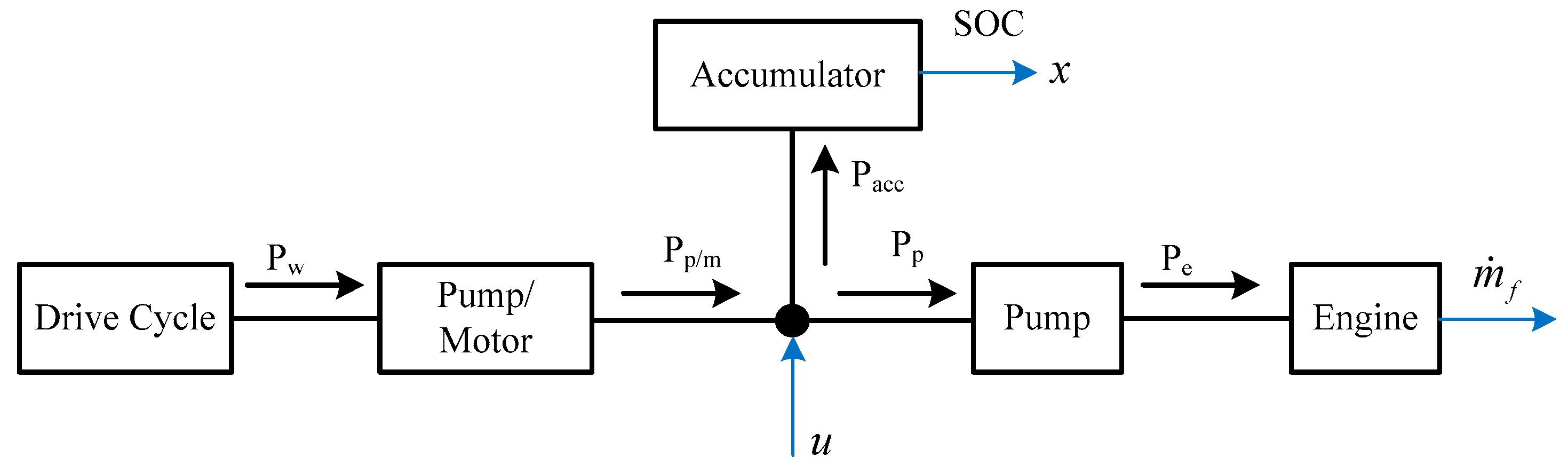
2.1. System Description
2.2. Forward Simulation Model
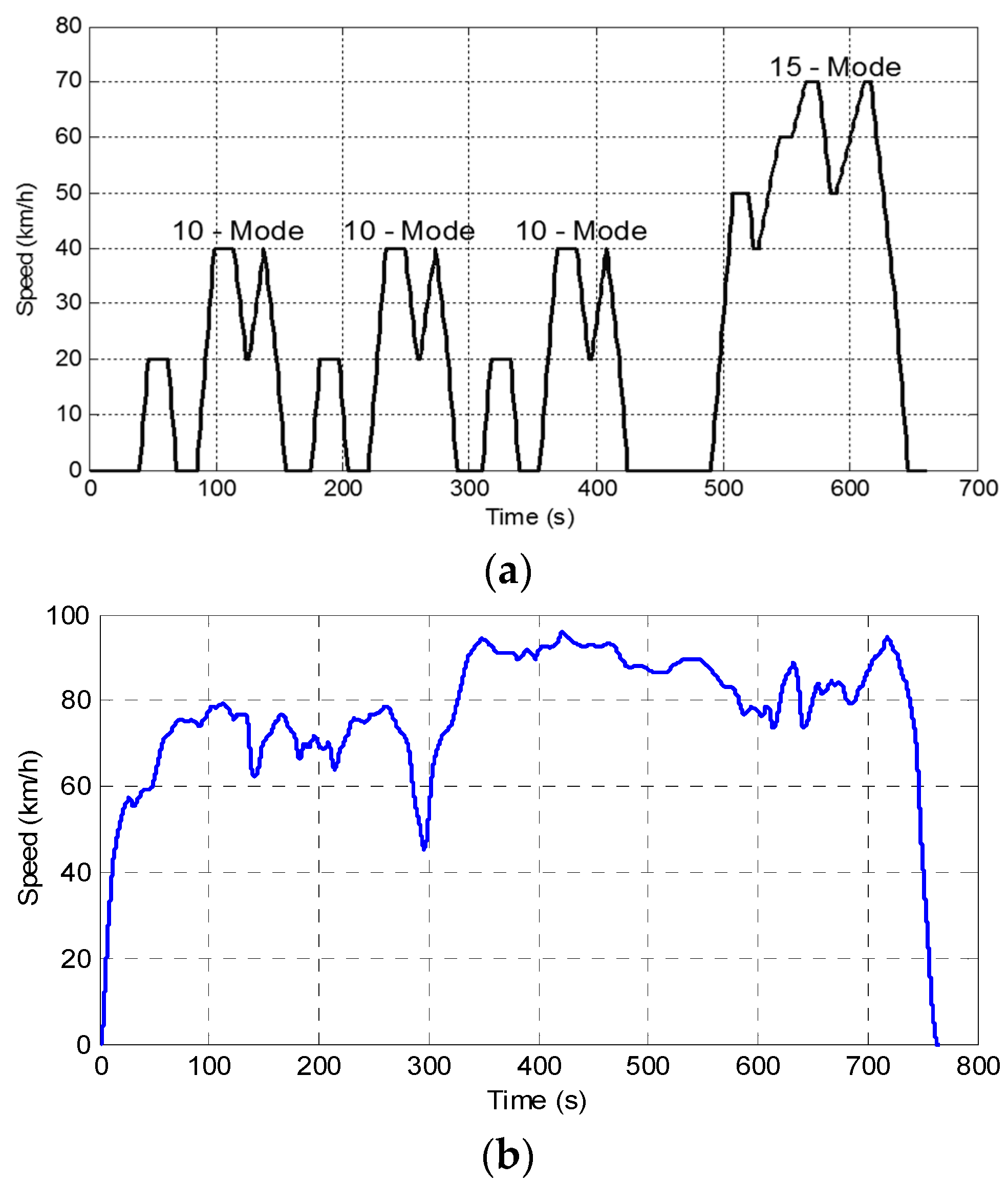
2.3. Driving Cycles
3. Control System Development
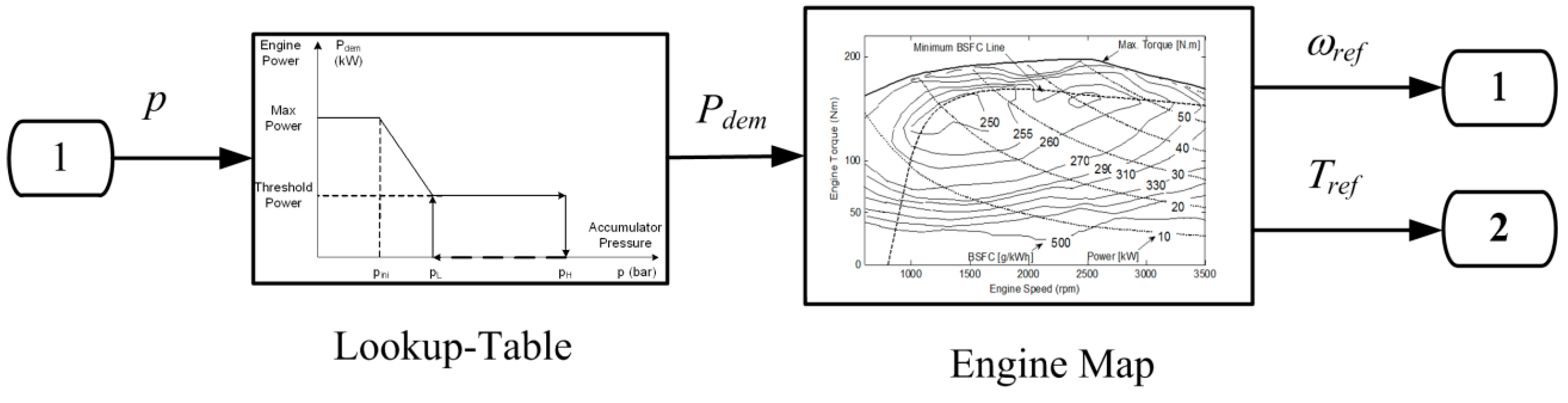
3.1. Thermostatic Control Strategy
3.2. Thermostatic Control Strategy
3.3. Dynamic Programming (DP) Optimal Control Strategy with DP Application
3.3.1. The Fundamental Formulation of DP
3.3.2. The Backward Model for the SHHV
3.3.3. The Optimization of Energy Management Using DP
4. Simulation and Results
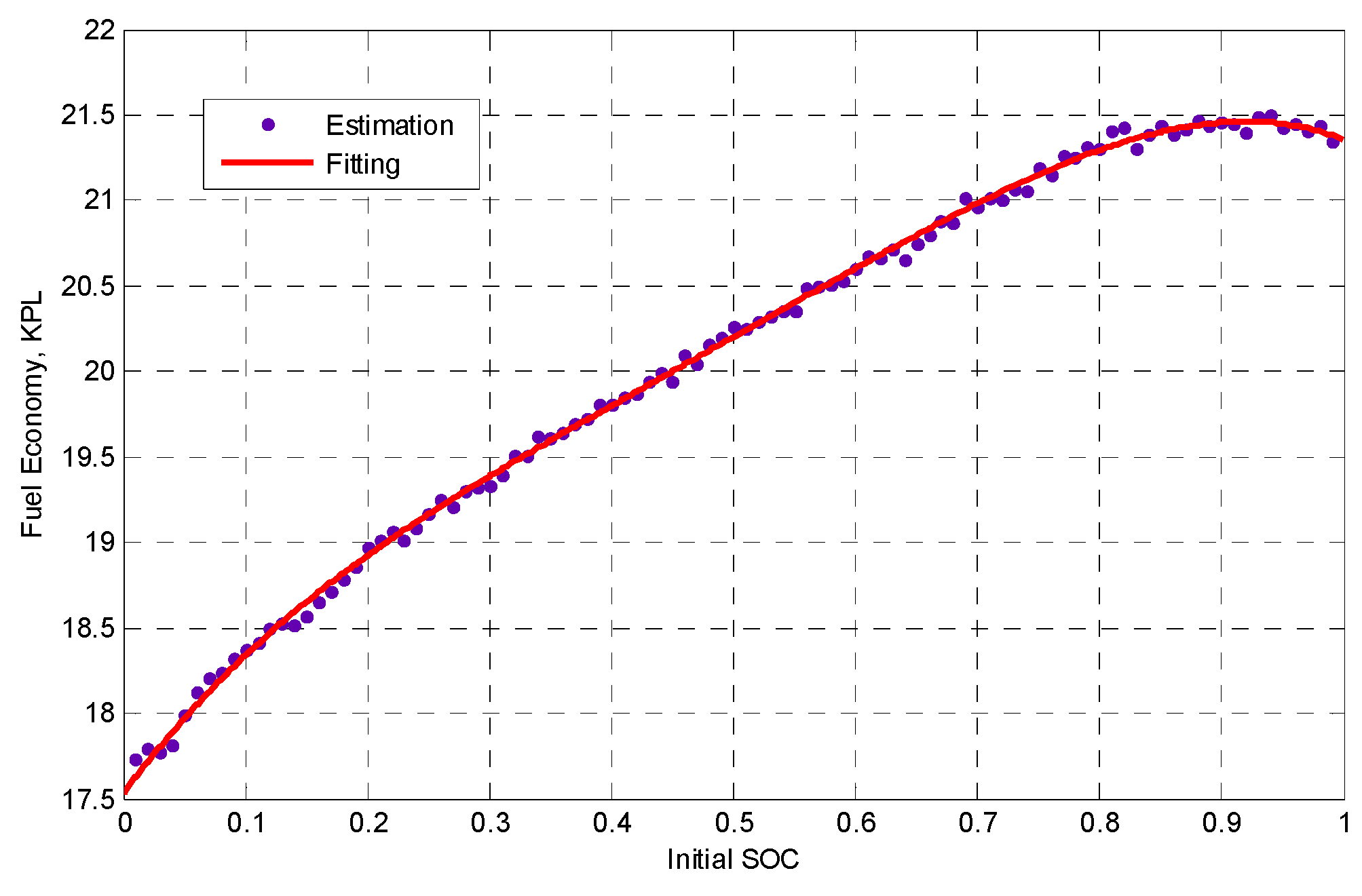
4.1. The Evaluation of Improvement in Fuel Economy
4.2. Rule-Based Control Strategies
4.3. The DP-Based Control Strategy
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Curtis, C. President Obama Announces New Fuel Economy Standards. Available online: http://www.whitehouse.gov/blog/2011/07/29/president-obama-announces-new-fuel-economy-standards (accessed on 29 July 2011).
- Backe, W. The present and future of fluid power. J. Syst. Control Eng. 1993, 207, 193–212. [Google Scholar] [CrossRef]
- Energy Protection Agency. World’s first full-size hydraulic hybrid SUV. In Proceedings of the 2004 SAE World Congress, Detroit, MI, USA, 8–11 March 2004.
- Deppen, T.O.; Alleyne, A.G.; Meyer, J.J.; Stelson, K.A. Comparative study of energy management strategies for hydraulic hybrids. J. Dyn. Syst. Meas. Control 2015, 137. [Google Scholar] [CrossRef]
- Filipi, Z.; Loucas, L.; Daran, B.; Lin, C.-C.; Yildir, U.; Wu, B.; Kokkolaras, M.; Assanis, D.; Peng, H.; Papalambros, P.; et al. Combined optimization of design and power management of the hydraulic hybrid propulsion system for the 6 × 6 medium truck. Int. J. Heavy Veh. Syst. 2004, 11, 371–401. [Google Scholar] [CrossRef]
- Kim, Y.; Filipi, Z. Series hydraulic hybrid propulsion for a light truck—Optimizing the thermostatic power management. SAE Tech. Pap. 2007. [Google Scholar] [CrossRef]
- Tavares, F.; Johri, R.; Salvi, A.; Baseley, S. Hydraulic hybrid powertrain-in-the-loop integration for analyzing real-world fuel economy and emissions improvements. SAE Tech. Pap. 2011. [Google Scholar] [CrossRef] [Green Version]
- Wu, B.; Lin, C.C.; Filipi, Z.; Peng, H.; Assanis, D. Optimal power management for a hydraulic hybrid delivery truck. Veh. Syst. Dyn. 2004, 42, 23–40. [Google Scholar] [CrossRef]
- Kolmanovsky, I.V.; Sivashankar, S.N.; Sun, J. Optimal control-based powertrain feasibility assessment: A software implementation perspective. In Proceedings of the 2005 American Control Conference, Boston, MA, USA, 8–10 June 2005; pp. 4452–4457.
- Lin, C.C.; Peng, H.; Grizzle, J.W. Control System Development for an Advanced-Technology Medium-Duty Hybrid Electric Truck; SAE International: Warrendale, PA, USA, 2003. [Google Scholar]
- O’Keefe, M.P.; Markel, T. Dynamic programming applied to investigate energy management strategies for a plug-in HEV. In Proceedings of the 22nd International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium, Yokohama, Japan, 23–28 October 2006.
- Shan, M. Modeling and Control Strategy for Series Hydraulic Hybrid Vehicles. Ph.D. Thesis, Toledo University, Toledo, OH, USA, December 2009. [Google Scholar]
- Lin, C.C.; Kang, J.-M.; Grizzle, J.W.; Peng, H. Energy manzagement strategy for a parallel hybrid electric truck. In Proceedings of the 2001 American Control Conference, Arlington, VA, USA, 25–27 June 2001; Volume 4, pp. 2878–2883.
- Lin, X.K.; Ivanco, A.; Filipi, Z. Optimization of rule-based control strategy for a hydraulic-electric hybrid light urban vehicle based on dynamic programming. SAE Int. J. Altern. Power 2012, 1, 249–259. [Google Scholar] [CrossRef]
- Vu, T.V.; Chen, C.K.; Hung, C.W. A model predictive control approach for fuel economy improvement of a series hydraulic hybrid vehicle. Energies 2014, 7, 7017–7040. [Google Scholar] [CrossRef]
- Miller, S. Dual Clutch Transmission Model in Simulink, MathWorks File Exchange. Available online: http://www.mathworks.com/matlabcentral/fileexchange/32246-dual-clutch-transmission-model-in-simulink (accessed on 8 March 2016).
- Vu, T.V. System Modeling and Control Strategy Development for a Series Hydraulic Hybrid Vehicle. Ph.D. Thesis, Da-yeh University, Changhua, Taiwan, 2015. [Google Scholar]
- Bellman, R.E. Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]
- Pourmovahed, A.; Beachley, N.H.; Fronczak, F.J. Modeling of a hydraulic energy regeneration system—Part II: Experimental program. J. Dyn. Syst. Meas. Control 1992, 114, 160–165. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| m | Vehicle mass (Gross Weight) | 3490 kg |
| Af | Front area | 2.5 m2 |
| Cd | Drag coefficient | 0.3 |
| ρ | Air density | 1.2 kg·m−3 |
| idf | Differential ratio | 4.875 |
| fr | Tire rolling resistance | 0.008 |
| rw | Tire radius | 0.312 m |
| θ | Road grade | 0% |
| Pe,max | Maximum output power of the engine | 61 kW |
| ωe,max | Maximum engine speed | 4700 rpm |
| ωe,min | Minimum engine speed | 800 rpm |
| Je | Engine inertia | 0.12 kg·m2 |
| JP1 | Pump inertia | 0.02 kg·m2 |
| D1 | Maximum displacement of the pump | 55 cm3·rev−1 |
| D2 | Maximum displacement of the pump/motor | 75 cm3·rev−1 |
| Va | Accumulator volume | 68 L |
| Vh | High-pressure hose volume | 1.85 L |
| pa,max | Maximum working pressure of the accumulator | 350 bar |
| ppr | Pre-charge pressure of the accumulator | 120 bar |
| u | Pacc | Pp | Description |
|---|---|---|---|
| 0 | 0 | Pp/m | Engine Propelling |
| 1 | Pp/m | 0 | Accumulator Propelling |
| 0< u <1 | Propelling | Propelling | Engine and Accumulator Propelling |
| u < 0 | Charging | Propelling | Engine Propelling and Accumulator Charging |
| Name | Description | Symbol | Operating Range | Number of Grid |
|---|---|---|---|---|
| State | Accumulator SOC | x | 0:0.025:1 | M = 40 |
| Control | Power-Splitting Factor | u | 0:0.02:1 | L =50 |
| Control Strategy | Japan 1015 | HWFET | ||
|---|---|---|---|---|
| Fuel Economy (km/L) | Fuel Economy Improvement (%) | Fuel Economy (km/L) | Fuel Economy Improvement (%) | |
| Conventional | 10.08 | - | 11.57 | - |
| DP | 20.05 | 98.91 | 19.53 | 68.79 |
| DP-Based Thermostatic | 17.29 | 71.53 | - | - |
| DP-Based Modulated-pressure | - | - | 18.14 | 56.78 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hung, C.-W.; Vu, T.-V.; Chen, C.-K. The Development of an Optimal Control Strategy for a Series Hydraulic Hybrid Vehicle. Appl. Sci. 2016, 6, 93. https://doi.org/10.3390/app6040093
Hung C-W, Vu T-V, Chen C-K. The Development of an Optimal Control Strategy for a Series Hydraulic Hybrid Vehicle. Applied Sciences. 2016; 6(4):93. https://doi.org/10.3390/app6040093
Chicago/Turabian StyleHung, Chih-Wei, Tri-Vien Vu, and Chih-Keng Chen. 2016. "The Development of an Optimal Control Strategy for a Series Hydraulic Hybrid Vehicle" Applied Sciences 6, no. 4: 93. https://doi.org/10.3390/app6040093