
Residual Dense Swin Transformer for Continuous-Scale Super-Resolution Algorithm


Abstract
:1. Introduction
- (1)
- A high-performance super-resolution network RDST is proposed. The network makes full use of the low- and high-level information in the image and is combined with an LIIF upsampling module to achieve continuous-scale super-resolution reconstruction of a single model.
- (2)
- A novel RDTB structure is proposed, which uses LFF to perform local information fusion on features within blocks and uses GFF to perform global information fusion on the features between blocks. At the same time, it combines the shallow information to fully explore the information expression in low-resolution images.
- (3)
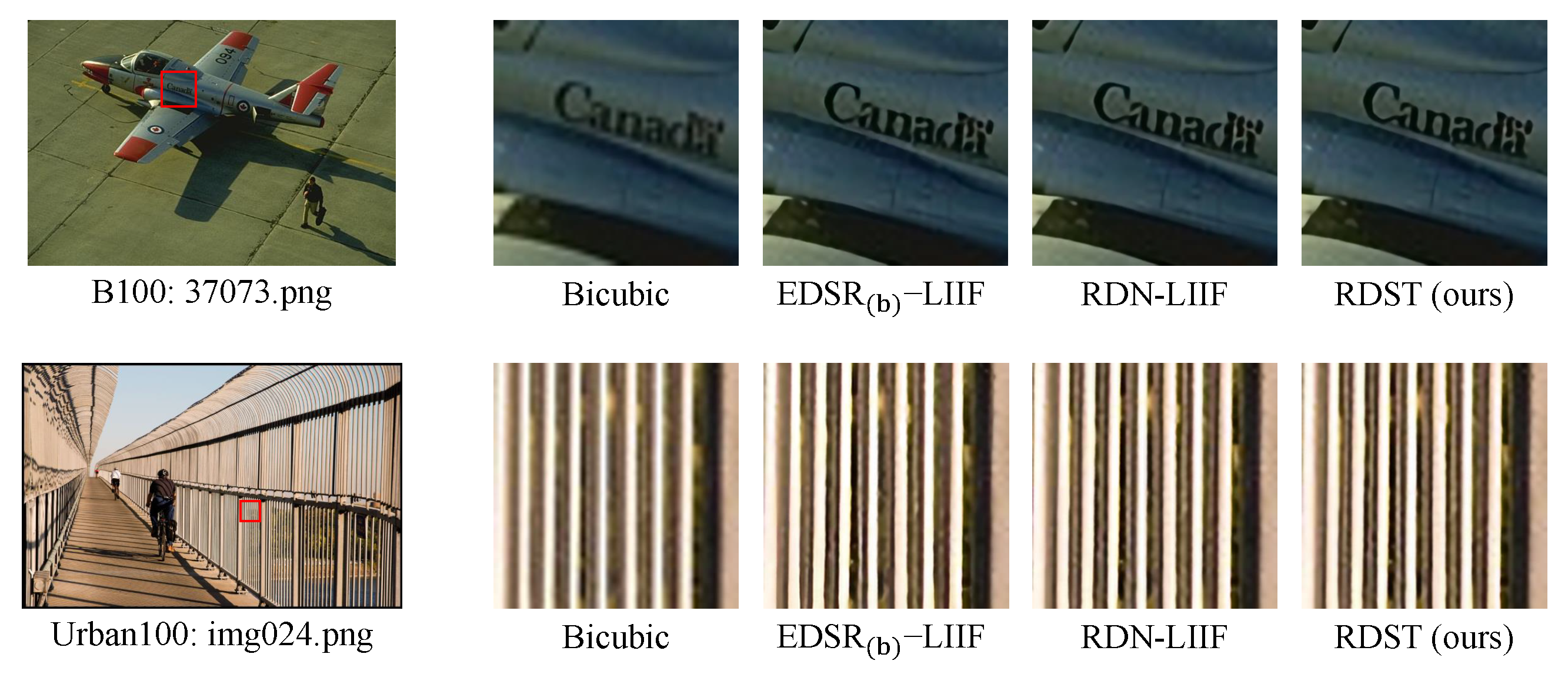
- Through a comparison experiment with a fixed multiple in the distribution and a continuous-scale super-resolution experiment on the benchmark, it is shown that RDST is equal to the state-of-the-art (SOTA) method in the super-resolution results for the fixed multiple, and the super-resolution results at magnification outside the dataset distribution are greatly improved.
2. Related Work
2.1. CNN-Based Super-Resolution Method
2.2. Transformer-Based Super-Resolution Method
3. Methodology
3.1. Network Architecture
3.1.1. Shallow and Multilevel Feature Extraction
3.1.2. Upsampling Module Using LIIF
3.2. Residual Dense Transformer Block
Swin Transformer Layer
3.3. Multilevel Feature Fusion
3.3.1. Global Feature Fusion
3.3.2. Global Residual Learning
4. Experiments
4.1. Dataset and Metrics
4.2. Implementation Details
4.3. Comparative Experiment
4.3.1. In-Distribution
4.3.2. Out of Distribution
4.4. Ablation Experiment and Discussion
4.4.1. Impact of LFF and GFF
4.4.2. Imapact of Head Number
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, Y.; Shao, L.; Frangi, A.F. Simultaneous Super-Resolution and Cross-Modality Synthesis of 3D Medical Images Using Weakly-Supervised Joint Convolutional Sparse Coding. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 5787–5796. [Google Scholar] [CrossRef]
- Mahapatra, D.; Bozorgtabar, B.; Garnavi, R. Image super-resolution using progressive generative adversarial networks for medical image analysis. Comput. Med Imaging Graph. 2019, 71, 30–39. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Yang, Z.; Zhang, L.; Shen, H. Super-Resolution Reconstruction for Multi-Angle Remote Sensing Images Considering Resolution Differences. Remote Sens. 2014, 6, 637–657. [Google Scholar] [CrossRef]
- Dong, X.; Wang, L.; Sun, X.; Jia, X.; Gao, L.; Zhang, B. Remote Sensing Image Super-Resolution Using Second-Order Multi-Scale Networks. IEEE Trans. Geosci. Remote. Sens. 2021, 59, 3473–3485. [Google Scholar] [CrossRef]
- Liu, W.; Lin, D.; Tang, X. Hallucinating faces: TensorPatch super-resolution and coupled residue compensation. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–26 June 2005; Volume 2, pp. 478–484. [Google Scholar] [CrossRef]
- Wang, Y.; Fevig, R.; Schultz, R.R. Super-resolution mosaicking of UAV surveillance video. In Proceedings of the 2008 15th IEEE International Conference on Image Processing, San Diego, CA, USA, 12–15 October 2008; pp. 345–348. [Google Scholar] [CrossRef]
- Yang, J.; Wright, J.; Huang, T.; Ma, Y. Image super-resolution as sparse representation of raw image patches. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 24–26 June 2008; pp. 1–8. [Google Scholar] [CrossRef]
- Gao, X.; Zhang, K.; Tao, D.; Li, X. Image Super-Resolution With Sparse Neighbor Embedding. IEEE Trans. Image Process. 2012, 21, 3194–3205. [Google Scholar] [CrossRef] [PubMed]
- Glasner, D.; Bagon, S.; Irani, M. Super-resolution from a single image. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 349–356. [Google Scholar] [CrossRef]
- Huang, J.B.; Singh, A.; Ahuja, N. Single image super-resolution from transformed self-exemplars. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 5197–5206. [Google Scholar] [CrossRef]
- Dong, C.; Loy, C.C.; He, K.; Tang, X. Image Super-Resolution Using Deep Convolutional Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 295–307. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Lee, J.K.; Lee, K.M. Accurate Image Super-Resolution Using Very Deep Convolutional Networks. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1646–1654. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J.K.; Lee, K.M. Deeply-Recursive Convolutional Network for Image Super-Resolution. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1637–1645. [Google Scholar] [CrossRef]
- Tong, T.; Li, G.; Liu, X.; Gao, Q. Image Super-Resolution Using Dense Skip Connections. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 4809–4817. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, Y.; Kong, Y.; Zhong, B.; Fu, Y. Residual Dense Network for Image Super-Resolution. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2472–2481. [Google Scholar] [CrossRef]
- Lim, B.; Son, S.; Kim, H.; Nah, S.; Lee, K.M. Enhanced Deep Residual Networks for Single Image Super-Resolution. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017; pp. 1132–1140. [Google Scholar] [CrossRef]
- Hu, X.; Mu, H.; Zhang, X.; Wang, Z.; Tan, T.; Sun, J. Meta-SR: A Magnification-Arbitrary Network for Super-Resolution. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 1575–1584. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, S.; Wang, X. Learning Continuous Image Representation with Local Implicit Image Function. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 8624–8634. [Google Scholar] [CrossRef]
- Vaswani, A.; Ramachandran, P.; Srinivas, A.; Parmar, N.; Hechtman, B.; Shlens, J. Scaling Local Self-Attention for Parameter Efficient Visual Backbones. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 12889–12899. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. In Proceedings of the 9th International Conference on Learning Representations, ICLR 2021, Virtual Event, 3–7 May 2021. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer Using Shifted Windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021; pp. 10012–10022. [Google Scholar]
- Chen, H.; Wang, Y.; Guo, T.; Xu, C.; Deng, Y.; Liu, Z.; Ma, S.; Xu, C.; Xu, C.; Gao, W. Pre-Trained Image Processing Transformer. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 12294–12305. [Google Scholar] [CrossRef]
- Lu, Z.; Liu, H.; Li, J.; Zhang, L. Efficient Transformer for Single Image Super-Resolution. arXiv 2021, arXiv:2108.11084. [Google Scholar]
- Yang, F.; Yang, H.; Fu, J.; Lu, H.; Guo, B. Learning Texture Transformer Network for Image Super-Resolution. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 5790–5799. [Google Scholar] [CrossRef]
- Liang, J.; Cao, J.; Sun, G.; Zhang, K.; Van Gool, L.; Timofte, R. SwinIR: Image Restoration Using Swin Transformer. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Montreal, BC, Canada, 11–17 October 2021; pp. 1833–1844. [Google Scholar] [CrossRef]
- Dong, C.; Loy, C.C.; Tang, X. Accelerating the Super-Resolution Convolutional Neural Network. In Proceedings of the Computer Vision—ECCV 2016, Cham, Switzerland, 11–14 October 2016; pp. 391–407. [Google Scholar]
- Tai, Y.; Yang, J.; Liu, X. Image Super-Resolution via Deep Recursive Residual Network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2790–2798. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely Connected Convolutional Networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2261–2269. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, K.; Li, K.; Wang, L.; Zhong, B.; Fu, Y. Image Super-Resolution Using Very Deep Residual Channel Attention Networks. In Proceedings of the Computer Vision—ECCV 2018, Cham, Switzerland, 8–14 September 2018; pp. 294–310. [Google Scholar]
- Li, J.; Fang, F.; Mei, K.; Zhang, G. Multi-scale Residual Network for Image Super-Resolution. In Proceedings of the ECCV 2018, Cham, Switzerland, 8–14 September 2018. [Google Scholar]
- Radford, A.; Narasimhan, K. Improving Language Understanding by Generative Pre-Training. 2018, in press. Available online: https://s3-us-west-2.amazonaws.com/openai-assets/research-covers/language-unsupervised/language_understanding_paper.pdf (accessed on 1 April 2024).
- Devlin, J.; Chang, M.W.; Lee, K.; Toutanova, K. BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding. arXiv 2019, arXiv:1810.04805. [Google Scholar]
- Touvron, H.; Cord, M.; Douze, M.; Massa, F.; Sablayrolles, A.; J’egou, H. Training data-efficient image Transformers & distillation through attention. In Proceedings of the ICML, 2021, Virtual, 18–24 July 2021. [Google Scholar]
- Agustsson, E.; Timofte, R. NTIRE 2017 Challenge on Single Image Super-Resolution: Dataset and Study. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017; pp. 1122–1131. [Google Scholar] [CrossRef]
- Bevilacqua, M.; Roumy, A.; Guillemot, C.; Alberi Morel, M.L. Low-Complexity Single-Image Super-Resolution based on Nonnegative Neighbor Embedding. In Proceedings of the British Machine Vision Conference, Surrey, UK, 3–7 September 2012; p. 135. [Google Scholar] [CrossRef]
- Zeyde, R.; Elad, M.; Protter, M. On Single Image Scale-Up Using Sparse-Representations. In Curves and Surfaces; Springer: Berlin/Heidelberg, Germany, 2012; pp. 711–730. [Google Scholar]
- Martin, D.; Fowlkes, C.; Tal, D.; Malik, J. A database of human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics. In Proceedings of the Eighth IEEE International Conference on Computer Vision. ICCV 2001, Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 416–423. [Google Scholar] [CrossRef]
- Matsui, Y.; Ito, K.; Aramaki, Y.; Fujimoto, A.; Ogawa, T.; Yamasaki, T.; Aizawa, K. Sketch-based manga retrieval using manga109 dataset. Multimed. Tools Appl. 2016, 76, 21811–21838. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.; Sheikh, H.; Simoncelli, E. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Scale | Set5 | Set14 | B100 | Urban100 | Manga109 | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | ||
| Bicubic | ×2 | 33.67 | 0.9299 | 30.32 | 0.8688 | 29.55 | 0.8431 | 26.87 | 0.8403 | 30.82 | 0.9339 |
| SRCNN | ×2 | 36.66 | 0.9542 | 32.45 | 0.9067 | 31.36 | 0.8879 | 29.5 | 0.8946 | 35.6 | 0.9663 |
| DRRN | ×2 | 37.74 | 0.9591 | 33.23 | 0.9136 | 32.05 | 0.8973 | 31.23 | 0.9188 | 37.6 | 0.9736 |
| SRDenseNet | ×2 | -/- | -/- | -/- | -/- | -/- | -/- | -/- | -/- | -/- | -/- |
| EDSR | ×2 | 38.11 | 0.9602 | 33.92 | 0.9195 | 32.32 | 0.9013 | 32.93 | 0.9351 | 39.1 | 0.9773 |
| RCAN | ×2 | 38.27 | 0.9614 | 34.12 | 0.9216 | 32.41 | 0.9027 | 33.34 | 0.9384 | 39.44 | 0.9786 |
| RDST-s* | ×2 | 38.32 | 0.9617 | 34.41 | 0.9243 | 32.44 | 0.9025 | 33.4 | 0.9398 | 39.73 | 0.9793 |
| Bicubic | ×3 | 30.4 | 0.8682 | 27.63 | 0.7742 | 27.2 | 0.7385 | 24.45 | 0.7349 | 26.95 | 0.8556 |
| SRCNN | ×3 | 32.75 | 0.909 | 29.3 | 0.8215 | 28.41 | 0.7863 | 26.24 | 0.7989 | 30.48 | 0.9117 |
| DRRN | ×3 | 34.03 | 0.9244 | 29.96 | 0.8349 | 28.95 | 0.8004 | 27.53 | 0.8378 | 32.42 | 0.9359 |
| SRDenseNet | ×3 | -/- | -/- | -/- | -/- | -/- | -/- | -/- | -/- | -/- | -/- |
| EDSR | ×3 | 34.65 | 0.928 | 30.52 | 0.8462 | 29.25 | 0.8093 | 28.8 | 0.8653 | 34.17 | 0.9476 |
| RCAN | ×3 | 34.74 | 0.9299 | 30.65 | 0.8482 | 29.32 | 0.8111 | 29.09 | 0.8702 | 34.44 | 0.9499 |
| RDST-s* | ×3 | 34.82 | 0.9304 | 30.77 | 0.8501 | 29.36 | 0.812 | 29.28 | 0.8742 | 34.82 | 0.9519 |
| Bicubic | ×4 | 28.43 | 0.8104 | 26.09 | 0.7027 | 25.95 | 0.6675 | 23.14 | 0.6577 | 24.9 | 0.7866 |
| SRCNN | ×4 | 30.48 | 0.8628 | 27.5 | 0.7513 | 26.9 | 0.7101 | 24.52 | 0.7221 | 27.58 | 0.8555 |
| DRRN | ×4 | 31.68 | 0.8888 | 28.21 | 0.7721 | 27.38 | 0.7284 | 25.44 | 0.7638 | 29.18 | 0.8914 |
| SRDenseNet | ×4 | 32.02 | 0.8934 | 28.5 | 0.7782 | 27.53 | 0.7337 | 26.05 | 0.7819 | -/- | -/- |
| EDSR | ×4 | 32.46 | 0.8968 | 28.8 | 0.7876 | 27.71 | 0.742 | 26.64 | 0.8033 | 31.02 | 0.9148 |
| RCAN | ×4 | 32.63 | 0.9002 | 28.87 | 0.7889 | 27.77 | 0.7436 | 26.82 | 0.8087 | 31.22 | 0.9173 |
| RDST-s* | ×4 | 32.66 | 0.9013 | 28.99 | 0.791 | 27.82 | 0.745 | 27.07 | 0.8147 | 31.8 | 0.9232 |
| Dataset | Method | Metric | In Distribution | Out of Distribution | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| ×2 | ×3 | ×4 | ×6 | ×8 | ×12 | ×18 | ×24 | ×30 | |||
| Set5 | bicubic | PSNR | 33.67 | 30.40 | 28.43 | 25.93 | 24.40 | 22.56 | 20.95 | 20.03 | 19.32 |
| SSIM | 0.9299 | 0.8682 | 0.8104 | 0.7206 | 0.6582 | 0.5948 | 0.5605 | 0.5485 | 0.5468 | ||
| Dense-LIIF | PSNR | 37.74 | 34.13 | 31.89 | 28.65 | 26.69 | 24.39 | 22.36 | 21.26 | 20.42 | |
| SSIM | 0.9594 | 0.9250 | 0.8911 | 0.8245 | 0.7665 | 0.6846 | 0.6032 | 0.5752 | 0.5694 | ||
| EDSR(b)-LIIF | PSNR | 37.99 | 34.40 | 32.21 | 28.94 | 27.01 | 24.60 | 22.51 | 21.40 | 20.49 | |
| SSIM | 0.9603 | 0.9271 | 0.8950 | 0.8316 | 0.7764 | 0.6949 | 0.6136 | 0.5803 | 0.5710 | ||
| RDN-LIIF | PSNR | 38.17 | 34.68 | 32.50 | 29.15 | 27.14 | 24.86 | 22.66 | 21.50 | 20.57 | |
| SSIM | 0.9610 | 0.9292 | 0.8988 | 0.8361 | 0.7809 | 0.7070 | 0.6175 | 0.5829 | 0.5713 | ||
| RDST-t | PSNR | 38.09 | 34.51 | 32.37 | 29.35 | 27.55 | 24.96 | 22.95 | 21.76 | 21.11 | |
| SSIM | 0.9607 | 0.9280 | 0.8971 | 0.8404 | 0.7916 | 0.7090 | 0.6277 | 0.5891 | 0.5795 | ||
| RDST-s | PSNR | 38.17 | 34.69 | 32.52 | 29.58 | 27.71 | 25.15 | 23.10 | 21.91 | 21.18 | |
| SSIM | 0.9610 | 0.9293 | 0.8991 | 0.8447 | 0.7952 | 0.7171 | 0.6403 | 0.5978 | 0.5796 | ||
| RDST-b | PSNR | 38.20 | 34.67 | 32.60 | 29.68 | 27.78 | 25.22 | 23.15 | 21.83 | 21.17 | |
| SSIM | 0.9612 | 0.9293 | 0.8998 | 0.8458 | 0.7969 | 0.7208 | 0.6414 | 0.5919 | 0.5822 | ||
| Set14 | bicubic | PSNR | 30.32 | 27.63 | 26.09 | 24.34 | 23.19 | 21.72 | 20.44 | 19.60 | 19.02 |
| SSIM | 0.8688 | 0.7742 | 0.7027 | 0.6174 | 0.5667 | 0.5145 | 0.4807 | 0.4637 | 0.4526 | ||
| Dense-LIIF | PSNR | 33.35 | 30.13 | 28.41 | 26.26 | 24.77 | 23.01 | 21.50 | 20.55 | 19.68 | |
| SSIM | 0.9150 | 0.8381 | 0.7772 | 0.6893 | 0.6333 | 0.5662 | 0.5156 | 0.4881 | 0.4674 | ||
| EDSR(b)-LIIF | PSNR | 33.60 | 30.34 | 28.63 | 26.47 | 24.93 | 23.13 | 21.61 | 20.66 | 19.81 | |
| SSIM | 0.9173 | 0.8430 | 0.7827 | 0.6963 | 0.6393 | 0.5715 | 0.5197 | 0.4919 | 0.4701 | ||
| RDN-LIIF | PSNR | 33.97 | 30.53 | 28.80 | 26.64 | 25.15 | 23.24 | 21.73 | 20.78 | 19.85 | |
| SSIM | 0.9209 | 0.8470 | 0.7875 | 0.7028 | 0.6465 | 0.5779 | 0.5237 | 0.4955 | 0.4719 | ||
| RDST-t | PSNR | 33.81 | 30.50 | 28.76 | 26.74 | 25.31 | 23.51 | 21.95 | 20.96 | 20.38 | |
| SSIM | 0.9199 | 0.8457 | 0.7854 | 0.7063 | 0.6527 | 0.5843 | 0.5312 | 0.5005 | 0.4834 | ||
| RDST-s | PSNR | 33.98 | 30.62 | 28.88 | 26.87 | 25.46 | 23.62 | 22.06 | 21.00 | 20.46 | |
| SSIM | 0.9214 | 0.8478 | 0.7883 | 0.7108 | 0.6564 | 0.5876 | 0.5343 | 0.5020 | 0.4848 | ||
| RDST-b | PSNR | 33.92 | 30.64 | 28.91 | 26.91 | 25.49 | 23.63 | 22.03 | 20.98 | 20.48 | |
| SSIM | 0.9209 | 0.8481 | 0.7889 | 0.7119 | 0.6576 | 0.5881 | 0.5345 | 0.5015 | 0.4852 | ||
| B100 | bicubic | PSNR | 29.55 | 27.20 | 25.95 | 24.53 | 23.66 | 22.50 | 21.34 | 20.57 | 19.93 |
| SSIM | 0.8431 | 0.7385 | 0.6675 | 0.5871 | 0.5440 | 0.5031 | 0.4746 | 0.4597 | 0.4514 | ||
| Dense-LIIF | PSNR | 32.02 | 28.97 | 27.46 | 25.73 | 24.69 | 23.40 | 22.13 | 21.31 | 20.63 | |
| SSIM | 0.8968 | 0.8017 | 0.7315 | 0.6426 | 0.5907 | 0.5375 | 0.4981 | 0.4766 | 0.4642 | ||
| EDSR(b)-LIIF | PSNR | 32.18 | 29.11 | 27.60 | 25.84 | 24.80 | 23.48 | 22.22 | 21.39 | 20.68 | |
| SSIM | 0.8992 | 0.8059 | 0.7368 | 0.6484 | 0.5960 | 0.5413 | 0.5009 | 0.4785 | 0.4653 | ||
| RDN-LIIF | PSNR | 32.32 | 29.26 | 27.74 | 25.98 | 24.91 | 23.57 | 22.29 | 21.45 | 20.74 | |
| SSIM | 0.9010 | 0.8098 | 0.7420 | 0.6547 | 0.6018 | 0.5454 | 0.5033 | 0.4808 | 0.4669 | ||
| RDST-t | PSNR | 32.24 | 29.18 | 27.66 | 26.03 | 25.13 | 23.81 | 22.70 | 21.68 | 21.29 | |
| SSIM | 0.8999 | 0.8078 | 0.7397 | 0.6579 | 0.6131 | 0.5534 | 0.5131 | 0.4842 | 0.4744 | ||
| RDST-s | PSNR | 32.31 | 29.27 | 27.75 | 26.11 | 25.21 | 23.88 | 22.77 | 21.76 | 21.37 | |
| SSIM | 0.9009 | 0.8100 | 0.7426 | 0.6607 | 0.6161 | 0.5559 | 0.5147 | 0.4858 | 0.4758 | ||
| RDST-b | PSNR | 32.34 | 29.29 | 27.77 | 26.13 | 25.22 | 23.89 | 22.77 | 21.76 | 21.37 | |
| SSIM | 0.9012 | 0.8104 | 0.7430 | 0.6615 | 0.6169 | 0.5565 | 0.5150 | 0.4862 | 0.4759 | ||
| Urban100 | bicubic | PSNR | 26.87 | 24.45 | 23.14 | 21.63 | 20.73 | 19.61 | 18.63 | 18.03 | 17.61 |
| SSIM | 0.8403 | 0.7349 | 0.6577 | 0.5635 | 0.5137 | 0.4658 | 0.4376 | 0.4260 | 0.4193 | ||
| Dense-LIIF | PSNR | 31.50 | 27.72 | 25.72 | 23.47 | 22.20 | 20.71 | 19.47 | 18.72 | 18.18 | |
| SSIM | 0.9212 | 0.8421 | 0.7729 | 0.6687 | 0.6018 | 0.5250 | 0.4708 | 0.4461 | 0.4320 | ||
| EDSR(b)-LIIF | PSNR | 32.15 | 28.21 | 26.16 | 23.80 | 22.48 | 20.91 | 19.63 | 18.84 | 18.30 | |
| SSIM | 0.9284 | 0.8538 | 0.7879 | 0.6848 | 0.6167 | 0.5357 | 0.4772 | 0.4496 | 0.4345 | ||
| RDN-LIIF | PSNR | 32.87 | 28.82 | 26.68 | 24.20 | 22.79 | 21.15 | 19.80 | 19.00 | 18.44 | |
| SSIM | 0.9351 | 0.8662 | 0.8039 | 0.7029 | 0.6340 | 0.5488 | 0.4852 | 0.4548 | 0.4377 | ||
| RDST-t | PSNR | 32.42 | 28.45 | 26.39 | 24.15 | 22.77 | 21.22 | 19.91 | 19.15 | 18.52 | |
| SSIM | 0.9310 | 0.8588 | 0.7950 | 0.7005 | 0.6320 | 0.5526 | 0.4911 | 0.4627 | 0.4414 | ||
| RDST-s | PSNR | 32.82 | 28.82 | 26.71 | 24.38 | 22.98 | 21.40 | 20.03 | 19.27 | 18.61 | |
| SSIM | 0.9349 | 0.8660 | 0.8044 | 0.7104 | 0.6416 | 0.5605 | 0.4957 | 0.4665 | 0.4438 | ||
| RDST-b | PSNR | 32.93 | 28.90 | 26.79 | 24.47 | 23.01 | 21.42 | 20.05 | 19.27 | 18.65 | |
| SSIM | 0.9356 | 0.8676 | 0.8065 | 0.7130 | 0.6436 | 0.5620 | 0.4960 | 0.4657 | 0.4444 | ||
| Manga109 | bicubic | PSNR | 30.82 | 26.95 | 24.90 | 22.69 | 21.45 | 19.98 | 18.76 | 17.99 | 17.46 |
| SSIM | 0.9339 | 0.8556 | 0.7866 | 0.6958 | 0.6460 | 0.5977 | 0.5722 | 0.5624 | 0.5571 | ||
| Dense-LIIF | PSNR | 38.12 | 32.93 | 29.96 | 26.22 | 24.14 | 21.77 | 19.97 | 18.93 | 18.25 | |
| SSIM | 0.9757 | 0.9407 | 0.9018 | 0.8242 | 0.7638 | 0.6830 | 0.6209 | 0.5909 | 0.5744 | ||
| EDSR(b)-LIIF | PSNR | 38.67 | 33.53 | 30.58 | 26.77 | 24.57 | 22.04 | 20.14 | 19.06 | 18.34 | |
| SSIM | 0.9770 | 0.9450 | 0.9096 | 0.8380 | 0.7791 | 0.6954 | 0.6287 | 0.5954 | 0.5768 | ||
| RDN-LIIF | PSNR | 39.26 | 34.21 | 31.20 | 27.33 | 25.04 | 22.36 | 20.35 | 19.20 | 18.44 | |
| SSIM | 0.9781 | 0.9487 | 0.9170 | 0.8508 | 0.7948 | 0.7099 | 0.6386 | 0.6014 | 0.5806 | ||
| RDST-t | PSNR | 39.06 | 33.99 | 31.00 | 27.10 | 24.86 | 22.35 | 20.46 | 19.37 | 18.44 | |
| SSIM | 0.9779 | 0.9475 | 0.9151 | 0.8463 | 0.7894 | 0.7084 | 0.6412 | 0.6057 | 0.5810 | ||
| RDST-s | PSNR | 39.33 | 34.32 | 31.33 | 27.44 | 25.16 | 22.57 | 20.61 | 19.49 | 18.53 | |
| SSIM | 0.9784 | 0.9496 | 0.9189 | 0.8532 | 0.7980 | 0.7165 | 0.6470 | 0.6100 | 0.5837 | ||
| RDST-b | PSNR | 39.39 | 34.42 | 31.45 | 27.53 | 25.23 | 22.62 | 20.65 | 19.51 | 18.55 | |
| SSIM | 0.9785 | 0.9500 | 0.9198 | 0.8545 | 0.7997 | 0.7188 | 0.6490 | 0.6110 | 0.5844 | ||
| LFF | GFF | Metric | ×2 | ×3 | ×4 | ×6 | ×8 | ×12 | ×18 | ×24 | ×30 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| × | × | PSNR | 39.32 | 34.26 | 31.24 | 27.36 | 25.09 | 22.51 | 20.58 | 19.47 | 18.51 |
| SSIM | 0.9785 | 0.9491 | 0.9179 | 0.8515 | 0.7957 | 0.7141 | 0.6453 | 0.6088 | 0.5827 | ||
| ✓ | × | PSNR | 39.38 | 34.36 | 31.35 | 27.44 | 25.14 | 22.54 | 20.59 | 19.46 | 18.5 |
| SSIM | 0.9785 | 0.9497 | 0.919 | 0.8535 | 0.7982 | 0.7166 | 0.6471 | 0.6094 | 0.5826 | ||
| × | ✓ | PSNR | 39.26 | 34.22 | 31.18 | 27.34 | 25.05 | 22.48 | 20.55 | 19.45 | 18.49 |
| SSIM | 0.9783 | 0.9488 | 0.9171 | 0.8507 | 0.7949 | 0.7138 | 0.6452 | 0.6087 | 0.5827 | ||
| ✓ | ✓ | PSNR | 39.33 | 34.32 | 31.33 | 27.44 | 25.16 | 22.57 | 20.61 | 19.49 | 18.53 |
| SSIM | 0.9784 | 0.9496 | 0.9189 | 0.8532 | 0.7980 | 0.7165 | 0.6470 | 0.6100 | 0.5837 |
| Heads | ×2 | ×3 | ×4 | ×6 | ×8 | ×12 | ×18 | ×24 | ×30 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 38.92 | 33.87 | 30.94 | 27.12 | 24.9 | 22.38 | 20.47 | 19.38 | 18.45 |
| 2 | 39.00 | 33.94 | 31.00 | 27.15 | 24.93 | 22.4 | 20.50 | 19.41 | 18.47 |
| 4 | 38.99 | 33.92 | 30.95 | 27.09 | 24.87 | 22.34 | 20.45 | 19.37 | 18.44 |
| 8 | 39.06 | 33.99 | 31.00 | 27.10 | 24.86 | 22.35 | 20.46 | 19.37 | 18.44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Gui, Z.; Yuan, C.; Yang, G.; Gao, Y. Residual Dense Swin Transformer for Continuous-Scale Super-Resolution Algorithm. Appl. Sci. 2024, 14, 3678. https://doi.org/10.3390/app14093678
Liu J, Gui Z, Yuan C, Yang G, Gao Y. Residual Dense Swin Transformer for Continuous-Scale Super-Resolution Algorithm. Applied Sciences. 2024; 14(9):3678. https://doi.org/10.3390/app14093678
Chicago/Turabian StyleLiu, Jinwei, Zihan Gui, Chenghao Yuan, Guangyi Yang, and Yi Gao. 2024. "Residual Dense Swin Transformer for Continuous-Scale Super-Resolution Algorithm" Applied Sciences 14, no. 9: 3678. https://doi.org/10.3390/app14093678