We use MATLAB (2022b) for simulation experiments to test the efficacy of the control method suggested in this research. Meanwhile, we chose the planar AAP system and the planar AAAP system as the simulation’s experimental objects. In order to more effectively highlight the method proposed in this paper for addressing multi-uncertainty disturbances, we selected system parameters from other studies for comparison. This approach allows us to examine the universality of our method applied to the planar system.
4.1. AAP
In order to confirm the viability of the suggested control strategy and its ability to surmount the uncertainties arising from the initial torque and velocity disruptions, we used the planar AAP system to conduct the simulations, which were carried out in three different situations: the initial velocity of all links was zero, the initial PL velocity was non-zero, and the torque was added to the disturbances. Moreover, we selected two groups of planar AAP systems with different structural parameters for simulations to verify the validity of the presented approach.
The structural parameters of the planar AAP system are shown in
Table 1.
The initial states are selected as follows:
The parameters of (
21) are
. When we give a target position (
), as calculated by Algorithm 1, the target angles for each link are as follows:
Case A: Zero Initial Velocity
The controllers (
16) have parameters
and
for the simulation. The initial velocity of all links is set to zero.
Figure 2 shows the simulation results of each link with zero initial velocity. From
Figure 2a–c, it can be seen that at
s, the PL rotates at a steady speed, while the first two links are stabilized at the desired angle. From
s to
s, the planar AAP system can always be regarded as a PVP since the first link always maintains the target angle. Finally, at
s, the PL stabilizes at
rad. As can be seen in
Figure 2d, the endpoint of the PL has already reached the desired positional coordinates, indicating that the position of the planar AAP system control objective has been realized. The simulation results show that the control method is effective when all the link velocities are zero at the beginning.
Case B: Non-zero Initial velocity
The controllers (
16) have parameters
and
for the simulation. The initial velocity is chosen to test the efficacy of the control approach suggested in this paper, as follows:
The simulation results for a PL with non-zero initial velocity are shown in
Figure 3. As shown in
Figure 3a,b, the last link rotates at a steady speed at
s. The AL is controlled to the desired coordinates in the first stage, and the system is always treated as a planar Pendubot from
s to
s. In the second stage, as shown in
Figure 3c, the PL reaches the desired position at
s with
= 1.8458 rad, while the angular velocities of all links converge to zero as shown in
Figure 3d. The simulation results show that the control method is effective when the PL velocity is not zero at the beginning.
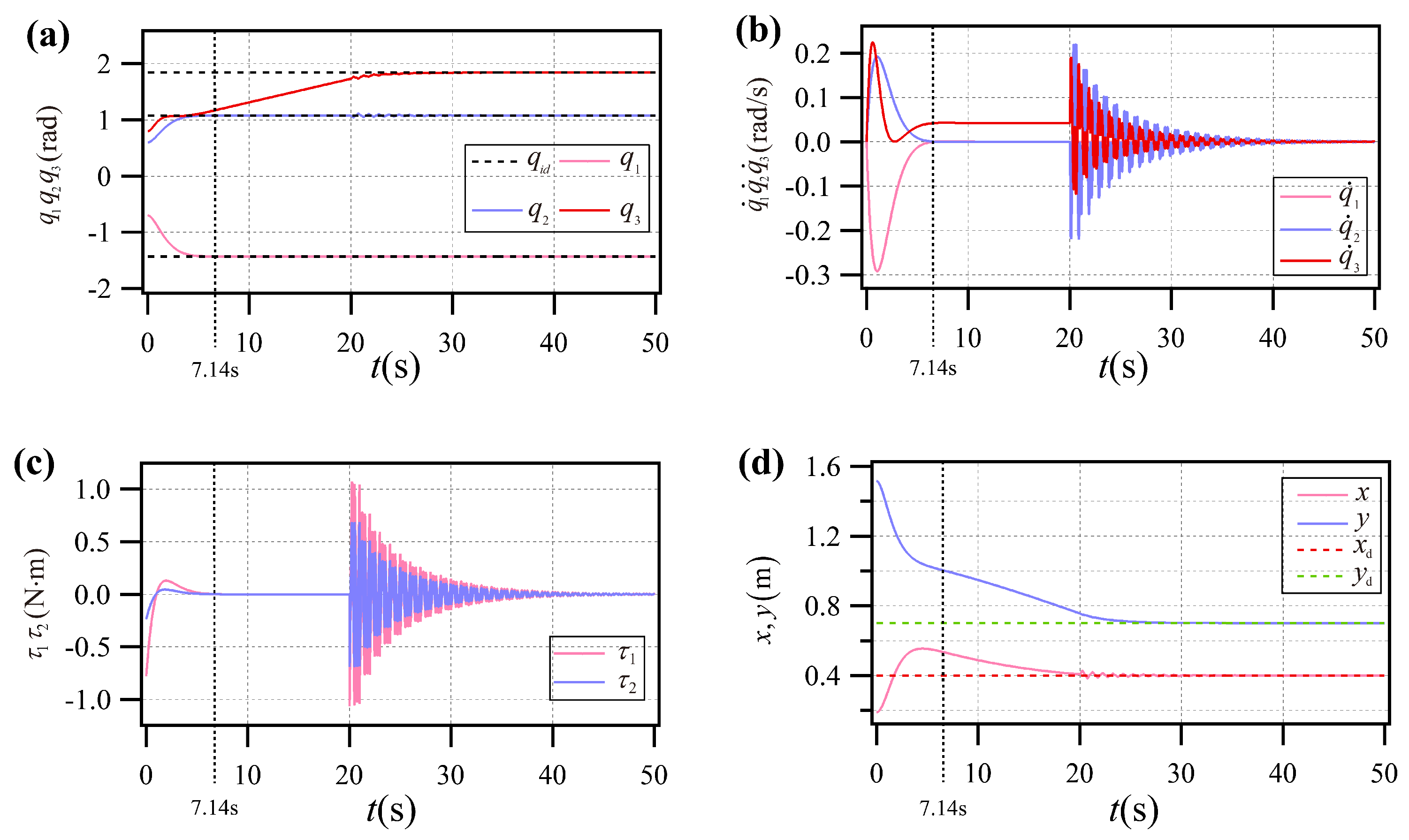
Case C: Disturbance Rejection
The controllers (
16) have parameters
and
for the simulation. At the moment,
s, a disturbance torque,
N·m, is added until the end of the control process to check the system’s immunity to disturbances. The initial velocity of all links is selected as zero.
The simulation results for the planar AAP system with additional disturbances are shown in
Figure 4. As shown in
Figure 4a–c, the first two links stabilize at the desired angle at
s, and the last link rotates at a steady velocity from
s to
s. Eventually, the last link stabilizes at the desired angle,
rad, and all the link velocities drop to zero at
s (shown in
Figure 4d).
For the second group of simulations of the planar AAP system, we chose the same structural parameters as in [
35], which are shown in
Table 2.
The initial states are selected as follows:
According to Algorithm 1, the target angles for each link are as follows:
Case A: Zero Initial Velocity
The controllers (
16) have parameters
and
for the simulation. The initial velocity of all links is set to zero.
Figure 5 shows the simulation results for each link with zero initial velocity. From
Figure 5a–c, it can be seen that at
s, the PL rotates at a steady speed while the first two links are stabilized at the desired angle. Finally, at
s, the PL stabilizes at
rad. As can be seen in
Figure 5d, the endpoint of the PL already reached the desired positional coordinates, indicating that the control objective of the planar AAP system was realized. The simulation results show that the control method is effective when all the link velocities are zero at the beginning.
Case B: Non-zero Initial Velocity
The controllers (
16) have parameters
and
for the simulation. The initial velocities are chosen to test the efficacy of the control approach proposed in this paper, as follows:
The simulation results for a PL with non-zero initial velocity are shown in
Figure 6. As shown in
Figure 6a,b, the last link rotates at a steady speed at
s. In the second stage, as shown in
Figure 6c, the PL reaches the desired position at
s with
= 1.8507 rad, while the angular velocities of all links converge to zero, as shown in
Figure 6d. The simulation results show that the control method is effective when the PL velocity is not zero at the beginning.
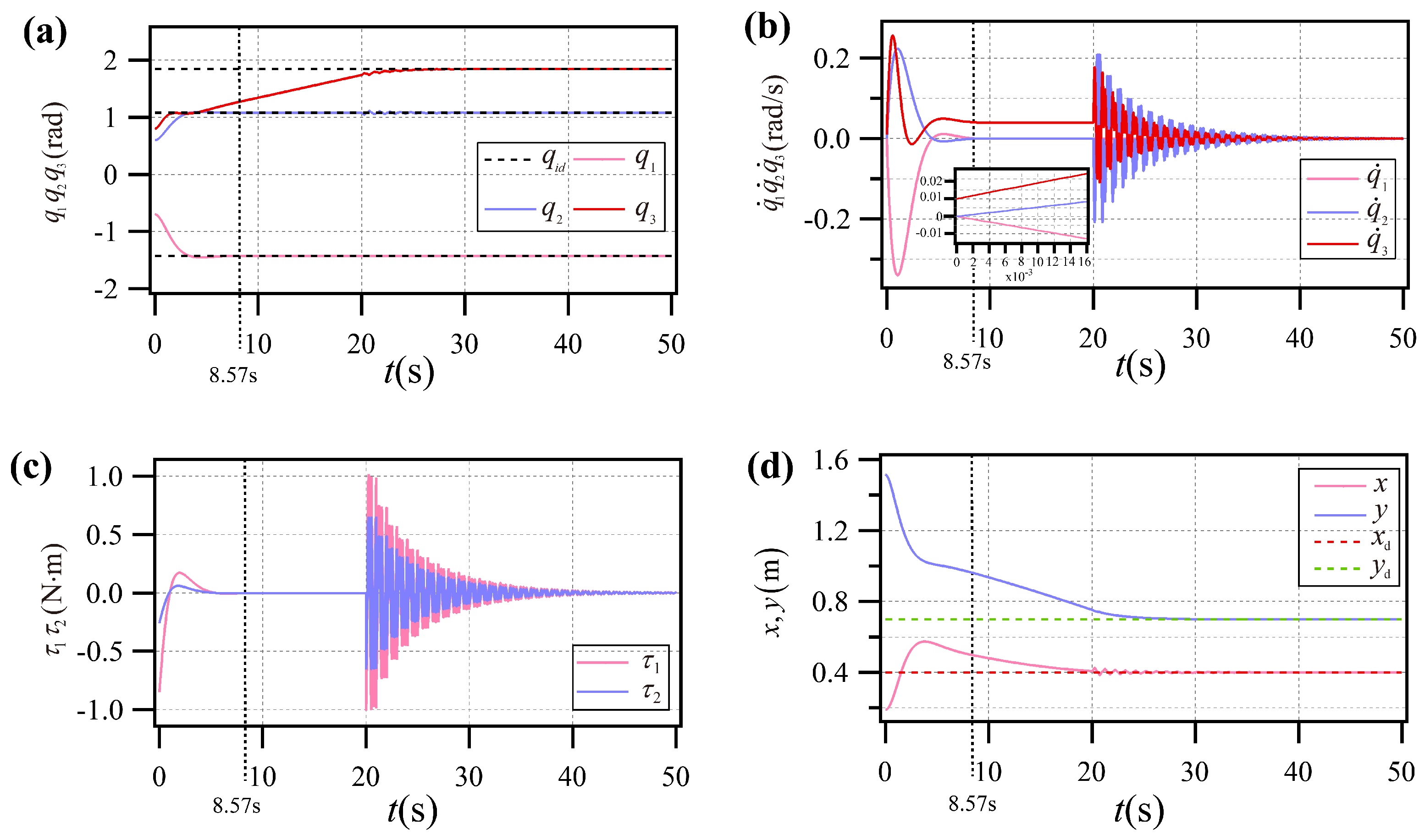
Case C: Disturbance Rejection
The controllers (
16) have parameters
and
for the simulation. At the moment,
s, a disturbance torque,
N·m, is added until the end of the control process, to check the system’s immunity to disturbances. The initial velocity of all links is selected as zero.
The simulation results for the planar AAP system with additional disturbances are shown in
Figure 7. As shown in
Figure 7a–c, the first two links stabilize at the desired angle at
s, and the last link rotates at a steady velocity from
s to
s. Eventually, the last link stabilizes at the desired angle
rad, and all the link velocities drop to zero at
s (as shown in
Figure 7d).
4.2. AAAP
Using the planar AAAP system, we simulate the proposed control strategy to verify its applicability. Moreover, three scenarios were simulated: one where the PL’s initial velocity is zero, another where the PL’s initial velocity is non-zero, and a third where torque is added to the disturbances. In addition, we selected two groups of planar AAAP systems with different structural parameters for further simulations to confirm the validity of the presented approach.
The structural parameters of the planar AAAP system are shown in
Table 3.
The chosen initial states are as follows:
The parameters in (
21) are
. When we give a target position (
,
), the target angles for all links determined by Algorithm 1 are as follows:
Case A: Zero Initial Velocity
The controllers (
16) have parameters
and
for the simulation. The chosen initial velocity of all links is zero.
The simulation results for every link with a zero beginning velocity are shown in
Figure 8. As shown in
Figure 8a–c, the last link rotates at a steady speed at
s while the first three links remain steady at their target angles. From
s to
s, the initial system is thought to be the planar Pendubot since the first stage’s control objectives have been met. Eventually, the last link steadies at the desired angle,
rad, and the endpoint attains the objective position at
s (shown in
Figure 8d). The simulation findings indicate that the control technique is still potent for the planar AAAP system.
Case B: Non-zero Initial Velocity
The controllers (
16) have parameters
and
for the simulation. The chosen initial velocity is as follows:
The simulation results for PL with non-zero initial velocity are shown in
Figure 9. As shown in
Figure 9a–c, the velocity of the first three links is stabilized at zero, and the last link rotates with a very small stabilized velocity at
s. The system is then considered to be a planar Pendubot with a non-zero initial velocity. Then, from
s to
s, the system is always considered as a planar Pendubot and the last link stabilizes at the desired angle of
rad. As shown in
Figure 9d, all of its endpoints reach the target position at
s. The simulation results show that the control technique is still effective for planar AAAP systems with a nonzero initial velocity.
Case C: Disturbance Rejection
The controllers (
16) have parameters
and
for the simulation. At the moment,
s, a disturbance torque,
N·m, is added until the end of the control process to check the system’s immunity to disturbances. The initial velocity of all links is chosen as zero.
The simulation results with additional disturbances are presented in
Figure 10. As shown in
Figure 10a–c, the first three links are stabilized at the desired angle and the PL rotates with a small stabilizing speed at
s. The first three links are stabilized at the desired angle and the PL rotates at a small stabilizing speed at
s. As a result of satisfying the control objective in the first stage, the initial system is treated as a planar Pendubot from
s to
s. Finally, the last link stabilizes at the desired angle,
rad, and the endpoint reaches the target position at
s (as shown in
Figure 10d). From the simulation results, the control technique is still effective.
For the second group of simulations of the planar AAAP system, we chose the same structural parameters as in [
37], which are shown in
Table 4.
The chosen initial states are as follows:
The parameters in (
21) are
. When we give a target position (
), the target angles for all links determined by Algorithm 1 are
Case A: Zero Initial Velocity
The controllers (
16) have parameters
and
for the simulation. The chosen initial velocities of all links are zero.
The simulation results for every link with a zero beginning velocity are shown in
Figure 11. As shown in
Figure 11a–c, the last link rotates at a steady speed at
s while the first three links remain steady at their target angles. From
s to
s, the initial system is thought to be the planar Pendubot since the first stage’s control objectives have been met. Eventually, the last link is stabilized at the desired angle,
rad, and the endpoint reaches the target position at
s (as shown in
Figure 11d). The simulation results indicate that the control method is still effective for the planar AAAP system.
Case B: Non-zero Initial Velocity
The controllers (
16) have parameters
and
for the simulation. The chosen initial velocity is as follows:
The simulation results for PL with non-zero initial velocity are shown in
Figure 12. As shown in
Figure 12a–c, the velocities of the first three links are stabilized at zero, and the last link rotates with a very small stabilized velocity at
s. The system is then considered to be a planar Pendubot with a non-zero initial velocity. Then, from
s to
s, the system is always considered to be a planar Pendubot, and the last link stabilizes at the desired angle of
rad. As shown in
Figure 12d, its endpoints reach the target position at
s. The simulation results show that the control method is still effective for planar AAAP systems with a non-zero initial velocity.
Case C: Disturbance Rejection
The controllers (
16) have parameters
and
for the simulation. At the moment,
s, a disturbance torque,
N·m, is added until the end of the control process to check the system’s immunity to disturbances. The initial velocity of all links is chosen as zero.
The simulation results with additional disturbances are presented in
Figure 13. As shown in
Figure 13a–c, the first three links are stabilized at the desired angles and the PL rotates with a small stabilizing speed at
s. The first three links are stabilized at the desired angles and the PL rotates at a small stabilizing speed at
s. As a result of satisfying the control objective in the first stage, the initial system is treated as a planar Pendubot from
s to
s. Finally, the last link stabilizes at the desired angle,
rad, and the endpoint reaches the target position at
s (as shown in
Figure 13d). From the simulation results, the control methods are still effective.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}