
Fault Diagnosis of Inter-Turn Fault in Permanent Magnet-Synchronous Motors Based on Cycle-Generative Adversarial Networks and Deep Autoencoder

Abstract
:Featured Application
Abstract
1. Introduction
2. Network Models
2.1. Generative Adversarial Network Model
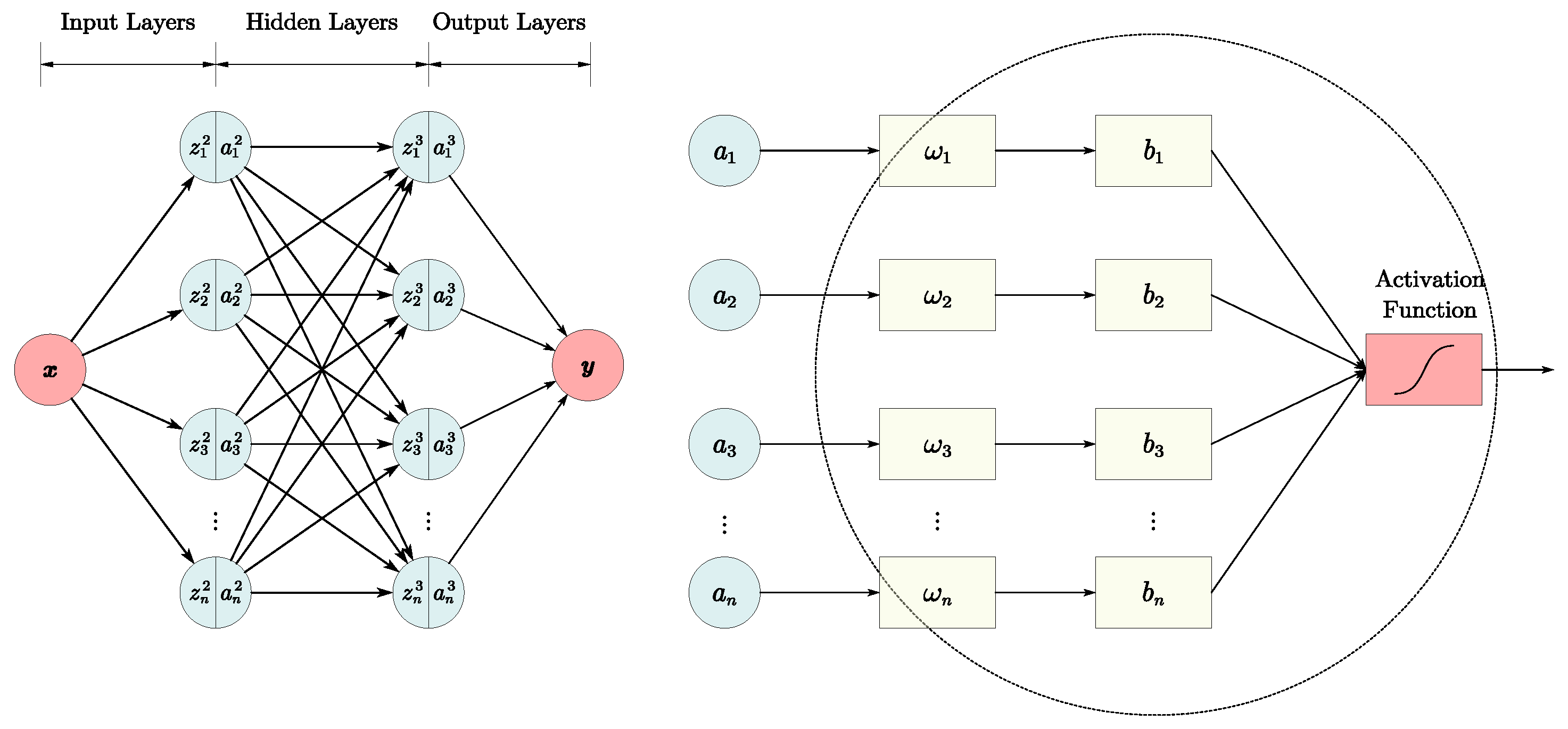
2.2. Deep Autoencoder Network Model
3. Samples Expansion of ITF in PMSM through Cyclic GAN
3.1. Steps in Building a Cycle GAN for Sample Expansions
- Pre-process the collected three-phase stator current data of the PMSM in a healthy state and ITF of different degrees, unify the size of each sample, and avoid missing data during the acquisition.
- Set up the Cycle GAN and DAE networks.
- Perform correlation analysis between the generated PMSM samples and the actual PMSM samples.
- Input the expanded sample set to the DAE for feature extraction and use the Softmax classifier to classify the fault features.
3.2. Determination of Cycle GAN Hyperparameters
4. Experimental Results
4.1. Motor Data Acquisition
- The validity of the generated sample of the turn-to-turn short-circuit fault current of a permanent magnet-synchronous motor;
- Improve the accuracy of the fault diagnosis after sample set expansion;
- The generalization capability for different motor diagnostics.
4.2. Effect Analysis of Generating Samples by Cycle GAN Network
4.3. Improve the Accuracy of Fault Diagnosis after Sample Set Expansion
4.4. Findings
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, G.; Yu, Y.; Tu, W. Review of Research on Fault Diagnosis of Permanent Magnet Synchronous Motor. Chin. J. Eng. Des. 2021, 28, 548–558. [Google Scholar]
- Firdaus, N.; Ab-Samat, H.; Prasetyo, B.T. Maintenance strategies and energy efficiency: A review. J. Qual. Maint. Eng. 2023, 29, 640–665. [Google Scholar] [CrossRef]
- Chen, Y.; Liang, H.; Wang, C.; Liang, S.; Zhong, R. Detection of Stator Inter-Turn Short-Circuit Fault in PMSM Based on Improved Wavelet Packet Transform and Signal Fusion. Trans. China Electrotech. Soc. 2020, 35 (Suppl. S1), 228–234. [Google Scholar]
- Ding, S.; Wang, Q.; Hang, J.; Hua, W.; Wang, Q. Inter-turn Fault Diagnosis of Permanent Magnet Synchronous Machine Considering Model Predictive Control. Proc. CSEE 2019, 39, 3697–3708. [Google Scholar]
- Peng, W.; Zhao, F.; Wang, Y.; Guan, T. Online Detection Method for Inter turn Short circuit fault of PMSM. Adv. Technol. Electr. Eng. Energy 2018, 37, 41–48. [Google Scholar]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef]
- Mo, Y.; Li, H.; Wei, H.; Zhang, Y. Demagnetization Fault Diagnosis Method for a Permanent Magnet Synchronous Motor Based on Limited Samples. J. Unmanned Undersea Syst. 2021, 29, 586–595. [Google Scholar]
- Li, H.; Zhang, Z.; Zhou, M.; Wei, H.; Zhang, Y. Fault Diagnosis of Inter-turn Short Circuit of Permanent Magnet Synchronous Motor Based on Deep Learning. Electr. Mach. Control 2020, 24, 173–180. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. Commun. ACM 2020, 63, 139–144. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, B. Survey of Generative Adversarial Network. Chin. J. Netw. Inf. Secur. 2021, 7, 68–85. [Google Scholar]
- Moti, Z.; Hashemi, S.; Namavar, A. Discovering Future Malware Variants by Generating New Malware Samples Using Generative Adversarial Network. In Proceedings of the 2019 9th International Conference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 24–25 October 2019; pp. 319–324. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Z.; Hao, Y.; Zhao, H.; Yang, Y. Optimized OTSU Segmentation Algorithm-Based Temperature Feature Extraction Method for Infrared Images of Electrical Equipment. Sensors 2024, 24, 1126. [Google Scholar] [CrossRef]
- Lai, J.; Wang, X.; Xiang, Q.; Song, Y.; Quan, W. Review on Autoencoder and its Application. J. Commun. 2021, 42, 218–230. [Google Scholar]
- Hang, J.; Hu, Q.; Ding, S.; Sun, W.; Ren, X. Robust Detection and Location of Inter-turn Short Circuit Fault in Permanent Magnet Synchronous Motor Based on Square of Residual Current Vector Modulus. Proc. CSEE 2022, 42, 340–351. [Google Scholar]
- Almahairi, A.; Rajeshwar, S.; Sordoni, A.; Bachman, P.; Courville, A. Augmented CycleGAN: Learning Many-to-Many Mappings from Unpaired Data. In Proceedings of the 2018 International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; pp. 195–204. [Google Scholar] [CrossRef]
- Ding, Y.; Ma, L.; Ma, J.; Wang, C.; Lu, C. A Generative Adversarial Network-Based Intelligent Fault Diagnosis Method for Rotating Machinery Under Small Sample Size Conditions. IEEE Access 2019, 7, 149736–149749. [Google Scholar] [CrossRef]
- Bao, J.; Wang, S.; Li, S.; Tang, D. Application of Deep Learning in Interturn Short Circuit Fault Diagnosis of PMSM. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 993–997. [Google Scholar] [CrossRef]
- Li, W.; Shang, Z.; Gao, M.; Qian, S.; Zhang, B.; Zhang, J. A novel deep autoencoder and hyperparametric adaptive learning for imbalance intelligent fault diagnosis of rotating machinery. Eng. Appl. Artif. Intell. 2021, 102, 104279. [Google Scholar] [CrossRef]
- Zhang, D.; Ning, Z.; Yang, B.; Wang, T.; Ma, Y. Fault diagnosis of permanent magnet motor based on DCGAN-RCCNN. Energy Rep. 2022, 8, 616–626. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, Z.; Xiao, R.; Jiang, P.; Dong, Z.; Deng, J. Operation state identification method for converter transformers based on vibration detection technology and deep belief network optimization algorithm. Actuators 2021, 10, 56. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, Z.; Yang, Y.; Xiao, J.; Chen, J. A Dynamic Monitoring Method of Temperature Distribution for Cable Joints Based on Thermal Knowledge and Conditional Generative Adversarial Network. IEEE Trans. Instrum. Meas. 2023, 72, 4507014. [Google Scholar] [CrossRef]
- Feng, L.; Luo, H.; Xu, S.; Du, K. Inverter Fault Diagnosis for a Three-Phase Permanent-Magnet Synchronous Motor Drive System Based on SDAE-GAN-LSTM. Electronics 2023, 12, 4172. [Google Scholar] [CrossRef]
- Skarolek, P.; Lipcak, O.; Lettl, J. Current Collapse Conduction Losses Minimization in GaN Based PMSM Drive. Electronics 2022, 11, 1503. [Google Scholar] [CrossRef]
- Jenatabadi, H.S. An Overview of Organizational Performance Index: Definitions and Measurements. Available SSRN 2599439 2015. [Google Scholar] [CrossRef]
- Ramachandran, P.; Zoph, B.; Le, Q.V. Searching for activation functions. arXiv 2017, arXiv:1710.05941. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generator | Discriminator | ||
|---|---|---|---|
| 1: | Upsampling layer × 1 | a: | Convolution layer × 2 |
| Convolution layer × 2 | Full connection layer × 1 | ||
| 2: | Upsampling layer × 1 | b: | Convolution layer × 3 |
| Convolution layer × 3 | Full connection layer × 1 | ||
| 3: | Upsampling layer × 1 | c: | Convolution layer × 4 |
| Convolution layer × 4 | Full connection layer × 1 | ||
| 4: | Upsampling layer × 1 | d: | Convolution layer × 5 |
| Convolution layer × 5 | Full connection layer × 1 | ||
| Number of Motor | Number of Samples | Expansion Method | Accuracy |
|---|---|---|---|
| 1 | 4500 | nothing | 89.81% |
| 4500 | GAN | 93.87% | |
| 4500 | Cycle GAN | 98.73% | |
| 2 | 4500 | nothing | 88.92% |
| 4500 | GAN | 91.19% | |
| 4500 | Cycle GAN | 98.92% | |
| 3 | 4500 | nothing | 89.23% |
| 4500 | GAN | 92.71% | |
| 4500 | Cycle GAN | 98.95% |
| Number of Samples | Classification Model | Expansion Method | Accuracy |
|---|---|---|---|
| 4500 | BP&Softmax | GAN | 66.73% |
| 4500 | SVM&Softmax | GAN | 83.19% |
| 4500 | CNN&Softmax | GAN | 87.96% |
| 4500 | SAE&Softmax | GAN | 93.41% |
| 4500 | DAE&Softmax | Cycle GAN | 98.84% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, W.; Chen, H.; Zhao, Q. Fault Diagnosis of Inter-Turn Fault in Permanent Magnet-Synchronous Motors Based on Cycle-Generative Adversarial Networks and Deep Autoencoder. Appl. Sci. 2024, 14, 2139. https://doi.org/10.3390/app14052139
Huang W, Chen H, Zhao Q. Fault Diagnosis of Inter-Turn Fault in Permanent Magnet-Synchronous Motors Based on Cycle-Generative Adversarial Networks and Deep Autoencoder. Applied Sciences. 2024; 14(5):2139. https://doi.org/10.3390/app14052139
Chicago/Turabian StyleHuang, Wenkuan, Hongbin Chen, and Qiyang Zhao. 2024. "Fault Diagnosis of Inter-Turn Fault in Permanent Magnet-Synchronous Motors Based on Cycle-Generative Adversarial Networks and Deep Autoencoder" Applied Sciences 14, no. 5: 2139. https://doi.org/10.3390/app14052139