
Optimal Global Positioning System/European Geostationary Navigation Overlay Service Positioning Model Using Smartphone


Abstract
:1. Introduction
2. Materials and Methods
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Park, K.W.; Park, J.-I.; Park, C. Efficient methods of utilizing multi-SBAS corrections in multi-GNSS positioning. Sensors 2020, 20, 256. [Google Scholar] [CrossRef]
- Krzykowska-Piotrowska, K.; Dudek, E.; Wielgosz, P.; Milanowska, B.; Batalla, J.M. On the Correlation of Solar Activity and Troposphere on the GNSS/EGNOS Integrity. A Fuzzy Logic Approach. Energies 2021, 14, 4534. [Google Scholar] [CrossRef]
- Kahlouche, S.; Benadda, B. Performance of the EGNOS system in Algeria for single and dual frequency. Int. J. Aviat. Aeronaut. Aerosp. 2021, 8, 8. [Google Scholar]
- Kahlouche, S. Assessment of EGNOS performance for civil aviation flight phase in the edge coverage area. Int. J. Aviat. Aeronaut. Aerosp. 2020, 7, 1. [Google Scholar]
- Barrios, J.; Pericacho, J.G.; Arenas, J.; Liu, J.X.; Domenech, S.; Bernárdez, J.M.; Bunce, D. Lessons Learned from SBAS Systems and Testbeds for the Global SBAS Concept. In Proceedings of the 34th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2021), St. Louis, MI, USA, 20–24 September 2021; pp. 1516–1549. [Google Scholar]
- Specht, M. Consistency of the empirical distributions of navigation positioning system errors with theoretical distributions-comparative analysis of the DGPS and EGNOS systems in the years 2006 and 2014. Sensors 2021, 21, 31. [Google Scholar] [CrossRef]
- Ibáñez Segura, D.; Rovira Garcia, A.; Alonso, M.T.; Sanz, J.; Juan, J.M.; Gonzalez Casado, G.; López Martínez, M. EGNOS 1046 Maritime Service Assessment. Sensors 2020, 20, 276. [Google Scholar] [CrossRef]
- Flament, D.; Thomas, D.; Lopez, C.; Melinotte, J.M.; Urbanska, K.; Derambure, X.; Boisseau, A. EGNOS System Evolutions in Europe and within the International Multi-SBAS context. In Proceedings of the 2020 European Navigation Conference (ENC), Dresden, Germany, 23–24 November 2020; IEEE: New York, NY, USA, 2020; pp. 1–13. [Google Scholar]
- Yayla, G.; Van Baelen, S.; Peeters, G.; Afzal, M.R.; Singh, Y.; Slaets, P. Accuracy benchmark of Galileo and EGNOS for Inland Waterways. In Proceedings of the International Ship Control Systems Symposium (iSCSS), Online, 6–8 October 2020; pp. 1–10. [Google Scholar]
- Alarcón, F.; Viguria, A.; Vilardaga, S.; Montolio, J.; Soley, S. EGNOS-based Navigation and Surveillance System to Support the Approval of RPAS Operations. In Proceedings of the 9th SESAR Innovation Days, Athens, Greece, 2–5 December 2019; pp. 2–6. [Google Scholar]
- Zangenehnejad, F.; Gao, Y. GNSS smartphone positioning: Advances, challenges, opportunities, and future perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef]
- Gogoi, N.; Minetto, A.; Linty, N.; Dovis, F. A controlled-environment quality assessment of android GNSS raw measurements. Electronics 2019, 8, 5. [Google Scholar] [CrossRef]
- European Global Navigation Satellite Systems Agency (GSA). Worlds First Dual-Frequency GNSS Smartphone Hits the Market. Available online: https://www.gsa.europa.eu/newsroom/news/world-s-first-dual-frequency-gnss-smartphone-hits-market (accessed on 17 August 2021).
- Massarweh, L.; Darugna, F.; Psychas, D.; Bruno, J. Statistical investigation of android GNSS data: Case study using Xiaomi Mi 8 dual-frequency raw measurements. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 3847–3861. [Google Scholar]
- Paziewski, J.; Fortunato, M.; Mazzoni, A.; Odolinski, R. An analysis of multi-GNSS observations tracked by recent Android smartphones and smartphone-only relative positioning results. Measurement 2021, 175, 109162. [Google Scholar] [CrossRef]
- Fortunato, M.; Ravanelli, M.; Mazzoni, A. Real-time geophysical applications with Android GNSS raw measurements. Remote Sens. 2019, 11, 2113. [Google Scholar] [CrossRef]
- Psychas, D.; Bruno, J.; Massarweh, L.; Darugna, F. Towards sub-meter positioning using Android raw GNSS measurements. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 3917–3931. [Google Scholar]
- Gao, R.; Xu, L.; Zhang, B.; Liu, T. Raw GNSS observations from Android smartphones: Characteristics and short-baseline RTK positioning performance. Meas. Sci. Technol. 2021, 32, 084012. [Google Scholar] [CrossRef]
- Miralles, D.; Levigne, N.; Akos, D.M.; Blanch, J.; Lo, S. Android raw GNSS measurements as the new anti-spoofing and anti-jamming solution. In Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 334–344. [Google Scholar]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of dual frequency GNSS observations from a Xiaomi Mi 8 Android smartphone and positioning performance analysis. Electronics 2019, 8, 91. [Google Scholar] [CrossRef]
- Robustelli, U.; Paziewski, J.; Pugliano, G. Observation quality assessment and performance of GNSS standalone positioning with code pseudoranges of dual-frequency Android smartphones. Sensors 2021, 21, 2125. [Google Scholar] [CrossRef]
- Weng, D.; Gan, X.; Chen, W.; Ji, S.; Lu, Y. A new DGNSS positioning infrastructure for android smartphones. Sensors 2020, 20, 487. [Google Scholar] [CrossRef]
- Morán, J.; Vázquez, J.; Sánchez, M.A.; Pampanas, H.; González, J.R. Enhancing Smartphones’ Location with EDAS (EGNOS Data Access Service) Internet Corrections. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2020), Online, 21–25 September 2020; pp. 1821–1836. [Google Scholar]
- Lim, C.; Shin, D.; Park, B.; Kee, C.; Seo, S.; Park, J.; Cho, A. L1 SFMC SBAS System to Improve the Position Accuracy of Android Device. In Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 455–481. [Google Scholar]
- Shao, B.; Ding, Q.; Wu, X. Estimation method of SBAS dual-frequency range error integrity parameter. Satell. Navig. 2020, 1, 9. [Google Scholar] [CrossRef]
- Joly, D.; de Echazarreta, C.L. EGNOS High Integrity System Test Bed (HISTB): A First Implementation of Dual Frequencies Multi Constellations Standard. In Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 2134–2141. [Google Scholar]
- Salos, D.; Mabilleau, M.; Rodriguez, C.; Secretan, H.; Suard, N.; Dufour, F.; Estival, P. SBAS DFMC Analysis with a Software Prototype. In Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, Oregon, 25–29 September 2017; pp. 2019–2030. [Google Scholar]
- Tabti, L.; Kahlouche, S.; Chikouche, D.; Benadda, B. Improvement of single-frequency GPS positioning performance based on EGNOS corrections in Algeria. J. Navig. 2020, 73, 846–860. [Google Scholar] [CrossRef]
- International Civil Aviation Organization (ICAO). PEGASUS; Technical Notes on SBAS, DocNo: PEG-TN-SBAS; ICAO: Montreal, QC, Canada, 2023. [Google Scholar]
- RTCA DO-229; Minimum Operational Performance Standards for Airborne Equipment Using Global Positioning System/Wide Area Augmentation System. Radio Technical Committee for Aeronautics: Washington, DC, USA, 2013.
- Grunwald, G.; Bakuła, M.; Ciećko, A.; Kaźmierczak, R. Examination of GPS/EGNOS integrity in north-eastern Poland. IET Radar Sonar Navig. 2016, 10, 114–121. [Google Scholar] [CrossRef]
- Ciećko, A. Analysis of the EGNOS quality parameters during high ionosphere activity. IET Radar Sonar Navig. 2019, 13, 1131–1139. [Google Scholar] [CrossRef]
- Ciećko, A.; Grunwald, G. Klobuchar, NeQuick G, and EGNOS Ionospheric Models for GPS/EGNOS Single-Frequency Positioning under 6–12 September 2017 Space Weather Events. Appl. Sci. 2020, 10, 1553. [Google Scholar] [CrossRef]
- Shan, W.; Ding, W.; Yingxuan, G. An Improved Ionospheric Delay Correction Method for SBAS. Chin. J. Electron. 2021, 30, 384–389. [Google Scholar] [CrossRef]
- Arenas, J.; Rovira-Garcia, A.; Juan, J.M.; Sanz, J.; Gonzalez-Casado, G.; Ibañez, D.; Orus, R. Low-latitude ionospheric effects on SBAS. Radio. Sci. 2016, 51, 603–618. [Google Scholar] [CrossRef]
- Zhigang, G.; Shuliang, L.; Rui, H. Estimation of Ionospheric Differential Corrections of Navigation Signals with Kalman Filter. Geomatics Inf. Sci. Wuhan Univ. 2010, 9, 1021–1023. [Google Scholar]
- Kos, T.; Botincan, M.; Markezic, I. Evaluation of EGNOS tropospheric delay model in south-eastern Europe. J. Navig. 2009, 62, 341–349. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, P. Optimal Hatch Filter with an adaptive smoothing time based on SBAS. In Proceedings of the 2nd International Conference on Soft Computing in Information Communication Technology, Taipei, Taiwan, 31 May–1 June 2014; pp. 34–38. [Google Scholar]
- Ibáñez, D.; Rovira-García, A.; Sanz, J.; Juan, J.M.; Gonzalez-Casado, G.; Jimenez-Baños, D.; López-Echazarreta, C.; Lapin, I. The GNSS Laboratory Tool Suite (gLAB) updates: SBAS, DGNSS and Global Monitoring System. In Proceedings of the 9th ESA Workshop on Satellite Navigation Technologies (NAVITEC 2018), Noordwijk, The Netherlands, 5–7 December 2018. [Google Scholar] [CrossRef]
- Geomatics, Navigation and Positioning Lab, UPC. GLAB Tool Suite. Geomatics Engineering Area UPC. Available online: https://gage.upc.edu/en/learning-materials/software-tools/glab-tool-suite (accessed on 5 January 2024).
- Gioia, C.; Borio, D. NeQuick-G and Android Devices: A Compromise between Computational Burden and Accuracy. Sensors 2020, 20, 5908. [Google Scholar] [CrossRef]
- Riley, S.; Lentz, W.; Clare, A. On the path to precision-observations with android GNSS observables. In Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, Oregon, 25–29 September 2017; pp. 116–129. [Google Scholar]
- Chen, B.; Li, Z.; Zhang, Q.; Li, X.; Yu, C.; El-Sheimy, N. Real-time precise point positioning with a Xiaomi MI 8 android smartphone. Sensors 2019, 19, 2835. [Google Scholar] [CrossRef]
- Geng, J.; Li, G. On the feasibility of resolving Android GNSS carrier-phase ambiguities. J. Geod. 2019, 93, 2621–2635. [Google Scholar] [CrossRef]
- Lachapelle, G.; Gratton, P.; Horrelt, J.; Lemieux, E.; Broumandan, A. Evaluation of a low cost hand held unit with GNSS raw data capability and comparison with an android smartphone. Sensors 2018, 18, 4185. [Google Scholar] [CrossRef] [PubMed]
- Inside GNSS. Smartphone-Based GNSS Positioning: Today and Tomorrow. Available online: https://insidegnss.com/smartphone-based-gnss-positioning-today-and-tomorrow/ (accessed on 10 October 2023).
- Zhu, H.; Xia, L.; Wu, D.; Xia, J.; Li, Q. Study on Multi-GNSS Precise Point Positioning Performance with Adverse Effects of Satellite Signals on Android Smartphone. Sensors 2020, 20, 6447. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z.; Guo, F.; Ren, X.; Zhang, K.; He, X. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
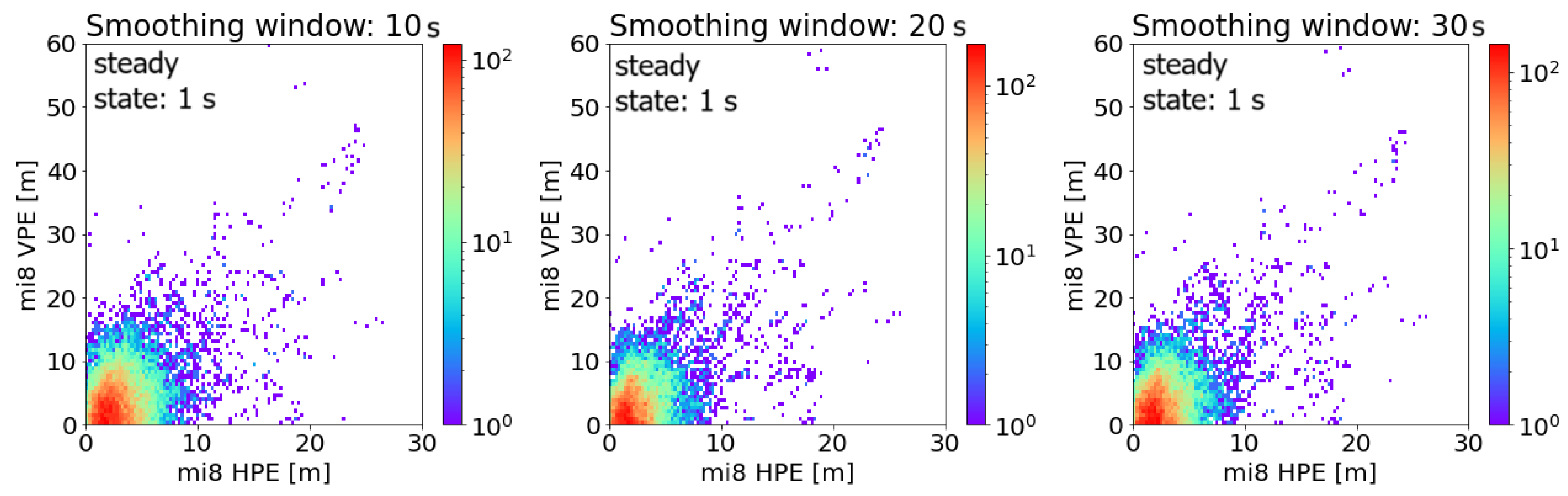
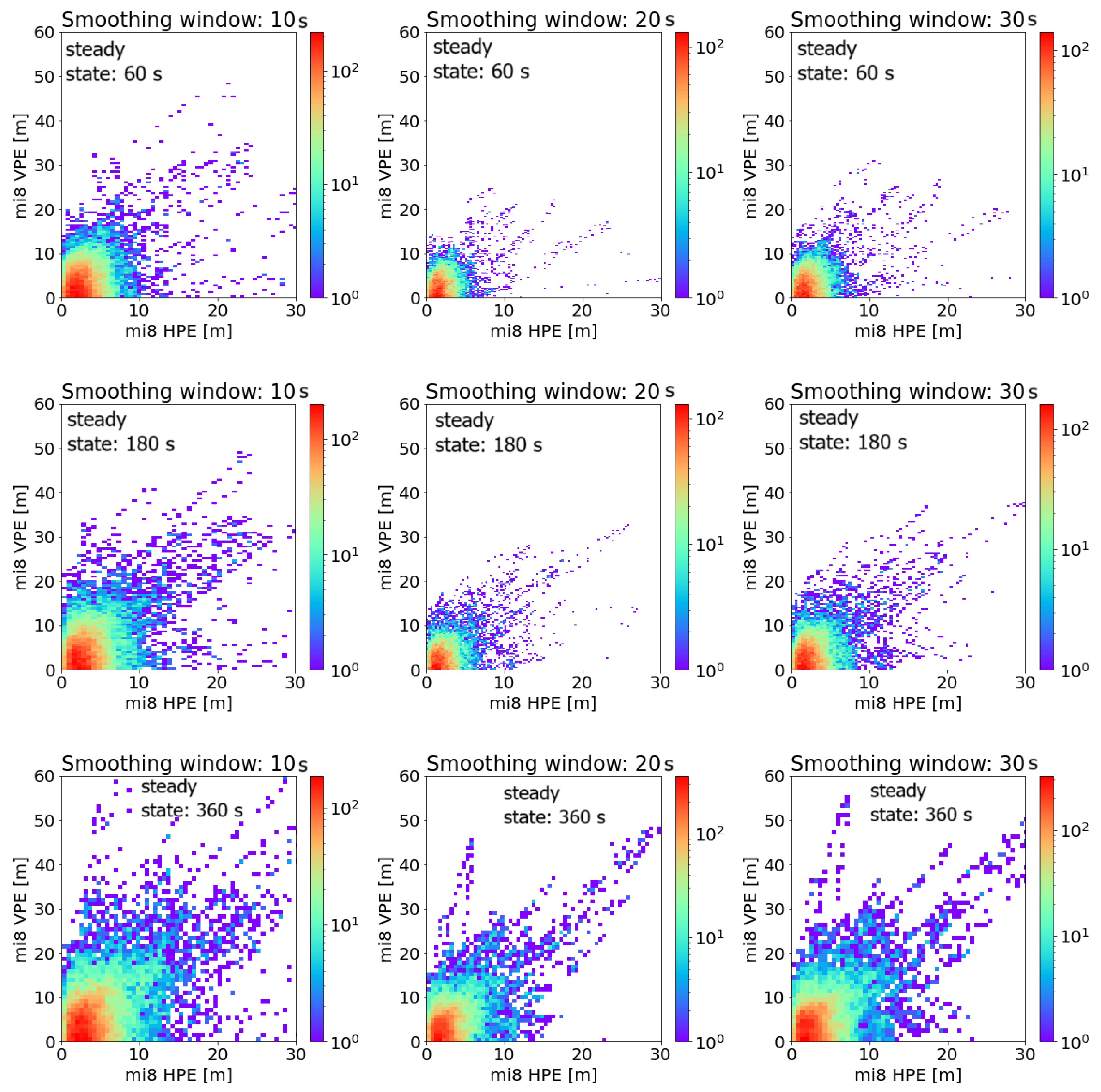
| Smoothing Window [s] | Steady State [s] | HPEmean [m] | HPEstd [m] | HPEmax [m] | VPEmean [m] | VPEstd [m] | VPEmax [m] |
|---|---|---|---|---|---|---|---|
| 10 | 1 | 3.16 | 2.55 | 26.56 | 4.67 | 4.41 | 60.46 |
| 60 | 3.23 | 2.85 | 57.05 | 4.52 | 4.22 | 48.37 | |
| 180 | 4.01 | 3.87 | 64.24 | 5.73 | 5.58 | 51.58 | |
| 360 | 4.74 | 5.42 | 86.87 | 22.21 | 46.78 | 171.00 | |
| 20 | 1 | 2.84 | 2.46 | 26.25 | 4.25 | 4.23 | 59.31 |
| 60 | 2.24 | 1.95 | 30.62 | 3.27 | 2.78 | 24.48 | |
| 180 | 3.12 | 2.84 | 40.65 | 4.47 | 4.27 | 39.29 | |
| 360 | 4.06 | 4.20 | 60.89 | 6.27 | 7.12 | 106.42 | |
| 30 | 1 | 2.68 | 2.45 | 26.03 | 4.05 | 4.16 | 58.94 |
| 60 | 2.59 | 2.22 | 33.49 | 3.70 | 3.25 | 30.84 | |
| 180 | 2.66 | 2.39 | 27.02 | 3.81 | 3.58 | 32.71 | |
| 360 | 3.48 | 3.66 | 50.00 | 5.41 | 6.21 | 86.42 | |
| No smoothing | - | 4.47 | 3.01 | 43.04 | 6.38 | 5.32 | 64.95 |
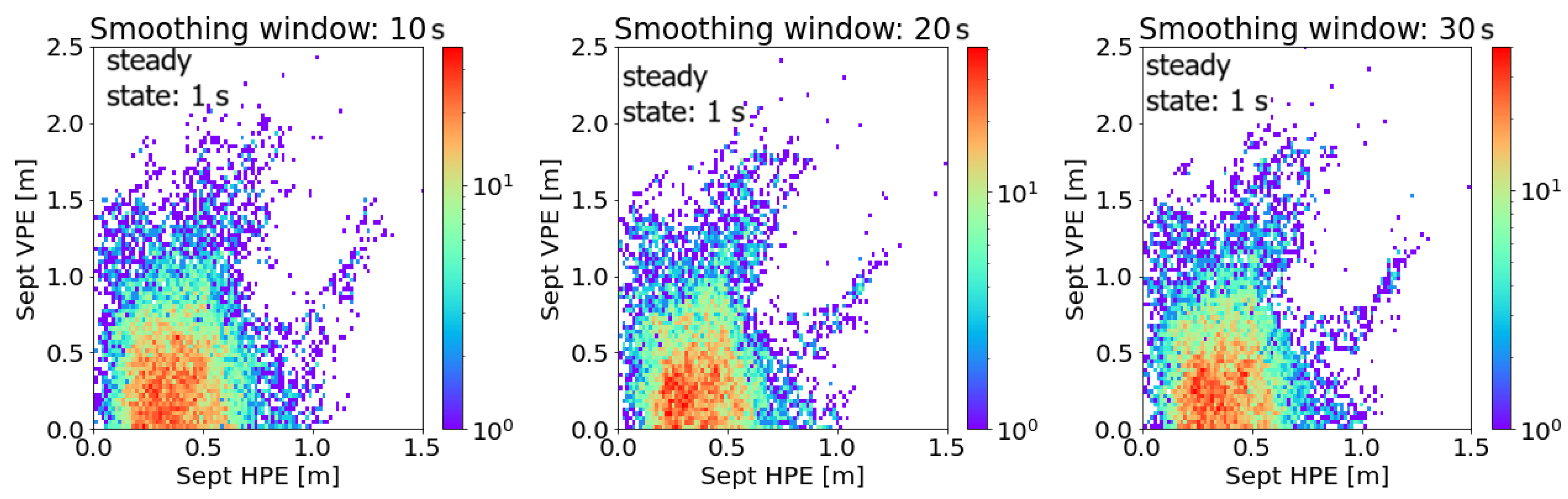
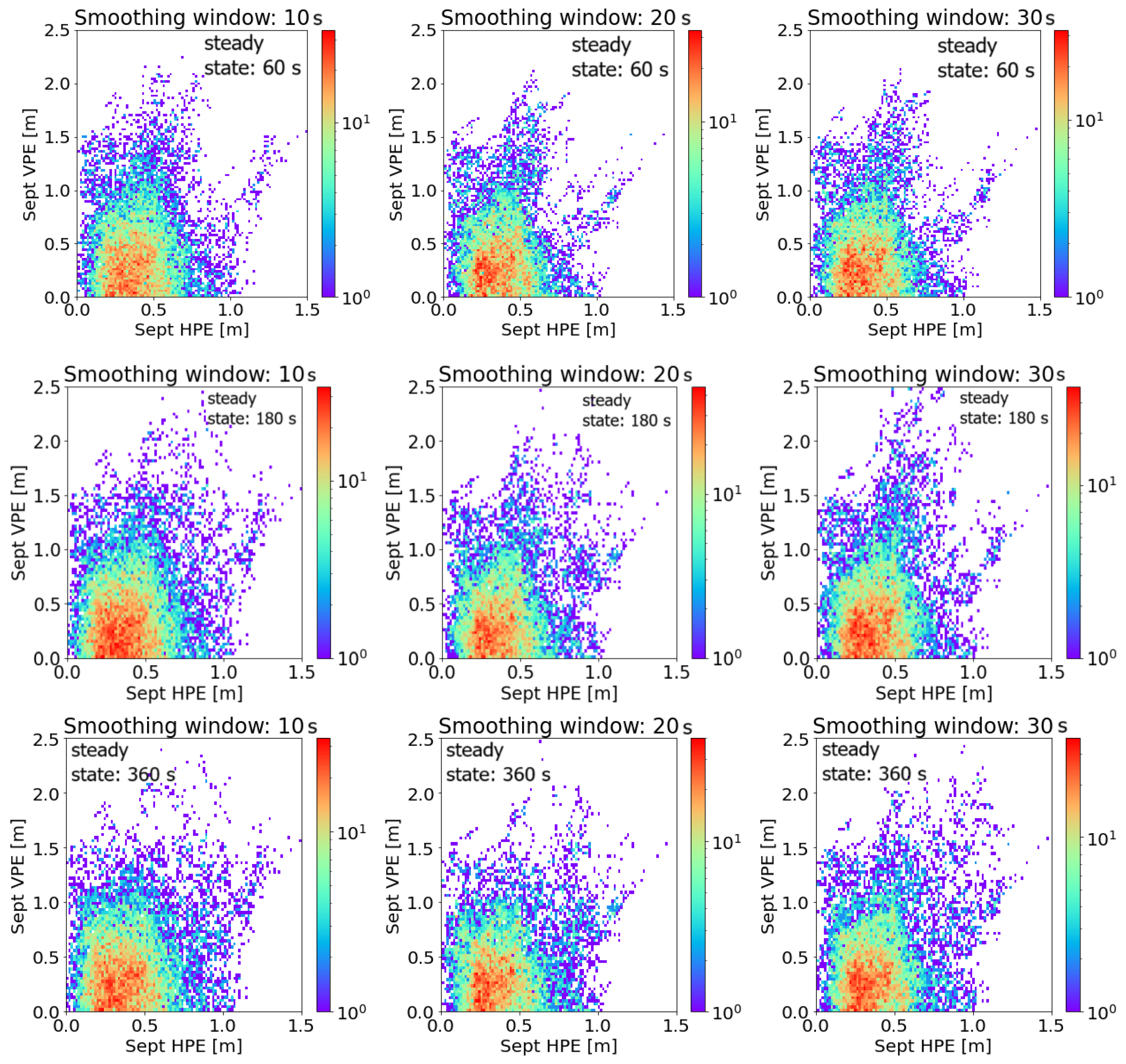
| Receiver | Weighting Variant | HPEmean | HPEstd | HPEmax | VPEmean | VPEstd | VPEmax |
|---|---|---|---|---|---|---|---|
| Xiaomi Mi8 | 1 | 3.22 | 2.66 | 55.08 | 4.39 | 4.29 | 123.29 |
| SNR | 2.72 | 2.18 | 53.56 | 3.90 | 3.82 | 88.14 | |
| elevation | 4.70 | 3.72 | 69.08 | 6.58 | 5.63 | 96.68 | |
| Septentrio AsteRx2 | 1 | 0.64 | 0.37 | 3.81 | 2.20 | 1.26 | 5.06 |
| SNR | 0.62 | 0.37 | 3.81 | 2.15 | 1.29 | 5.06 | |
| elevation | 0.66 | 0.47 | 2.44 | 2.07 | 1.11 | 4.35 |
| Receiver | Positioning Variant | HPEmean | HPEstd | HPEmax | VPEmean | VPEstd | VPEmax |
|---|---|---|---|---|---|---|---|
| Xiaomi Mi8 | GPS autonomous (weight: SNR) | 2.72 | 2.18 | 53.56 | 3.90 | 3.82 | 88.14 |
| GPS/EGNOS, smoothing window: 20 s; steady state: 60 s (weight: SNR) | 2.59 | 2.24 | 33.26 | 3.65 | 3.25 | 30.83 | |
| GPS/EGNOS, smoothing window: 20 s; steady state: 60 s (standard EGNOS weighting model) | 2.24 | 1.95 | 30.62 | 3.27 | 2.78 | 24.48 |
| Receiver | Variant | HPEmean | HPEstd | HPEmax | VPEmean | VPEstd | VPEmax |
|---|---|---|---|---|---|---|---|
| Xiaomi Mi8 | W: SNR | 2.59 | 2.24 | 33.26 | 3.65 | 3.25 | 30.83 |
| Original EGNOS | 2.24 | 1.95 | 30.62 | 3.27 | 2.78 | 24.48 | |
| Iono correction off | 2.64 | 2.25 | 30.68 | 5.00 | 3.69 | 32.10 | |
| Fast correction off | 2.80 | 2.31 | 32.88 | 4.18 | 3.54 | 30.51 | |
| Slow correction off | 3.09 | 2.57 | 43.93 | 3.66 | 3.29 | 39.03 | |
| RRC off | 2.59 | 2.22 | 33.49 | 3.70 | 3.25 | 30.84 | |
| Fast and slow correction off | 2.80 | 2.45 | 38.97 | 3.73 | 3.35 | 38.70 | |
| Fast, RRC, slow correction off | 2.80 | 2.45 | 38.97 | 3.73 | 3.35 | 38.70 | |
| Septentrio AsteRx2 | IN: SNR | 0.62 | 0.37 | 3.81 | 2.15 | 1.29 | 5.06 |
| Original EGNOS | 0.39 | 0.18 | 1.48 | 0.45 | 0.36 | 2.13 | |
| Iono correction off | 0.73 | 0.26 | 1.70 | 2.87 | 0.67 | 5.25 | |
| Fast correction off | 1.30 | 0.61 | 3.53 | 1.12 | 0.76 | 3.47 | |
| Slow correction off | 1.17 | 0.44 | 2.50 | 1.43 | 0.76 | 4.09 | |
| RRC off | 0.39 | 0.18 | 1.24 | 0.45 | 0.36 | 1.97 | |
| Fast and slow correction off | 0.74 | 0.42 | 1.81 | 0.73 | 0.56 | 2.37 | |
| Fast, RRC, slow correction off | 0.74 | 0.42 | 1.81 | 0.73 | 0.56 | 2.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grunwald, G.; Ciećko, A.; Krasuski, K.; Tanajewski, D. Optimal Global Positioning System/European Geostationary Navigation Overlay Service Positioning Model Using Smartphone. Appl. Sci. 2024, 14, 1840. https://doi.org/10.3390/app14051840
Grunwald G, Ciećko A, Krasuski K, Tanajewski D. Optimal Global Positioning System/European Geostationary Navigation Overlay Service Positioning Model Using Smartphone. Applied Sciences. 2024; 14(5):1840. https://doi.org/10.3390/app14051840
Chicago/Turabian StyleGrunwald, Grzegorz, Adam Ciećko, Kamil Krasuski, and Dariusz Tanajewski. 2024. "Optimal Global Positioning System/European Geostationary Navigation Overlay Service Positioning Model Using Smartphone" Applied Sciences 14, no. 5: 1840. https://doi.org/10.3390/app14051840