
Classification of Belts Status Based on an Automatic Generator of Fuzzy Rules Base System
 , and
, and
Abstract
:1. Introduction
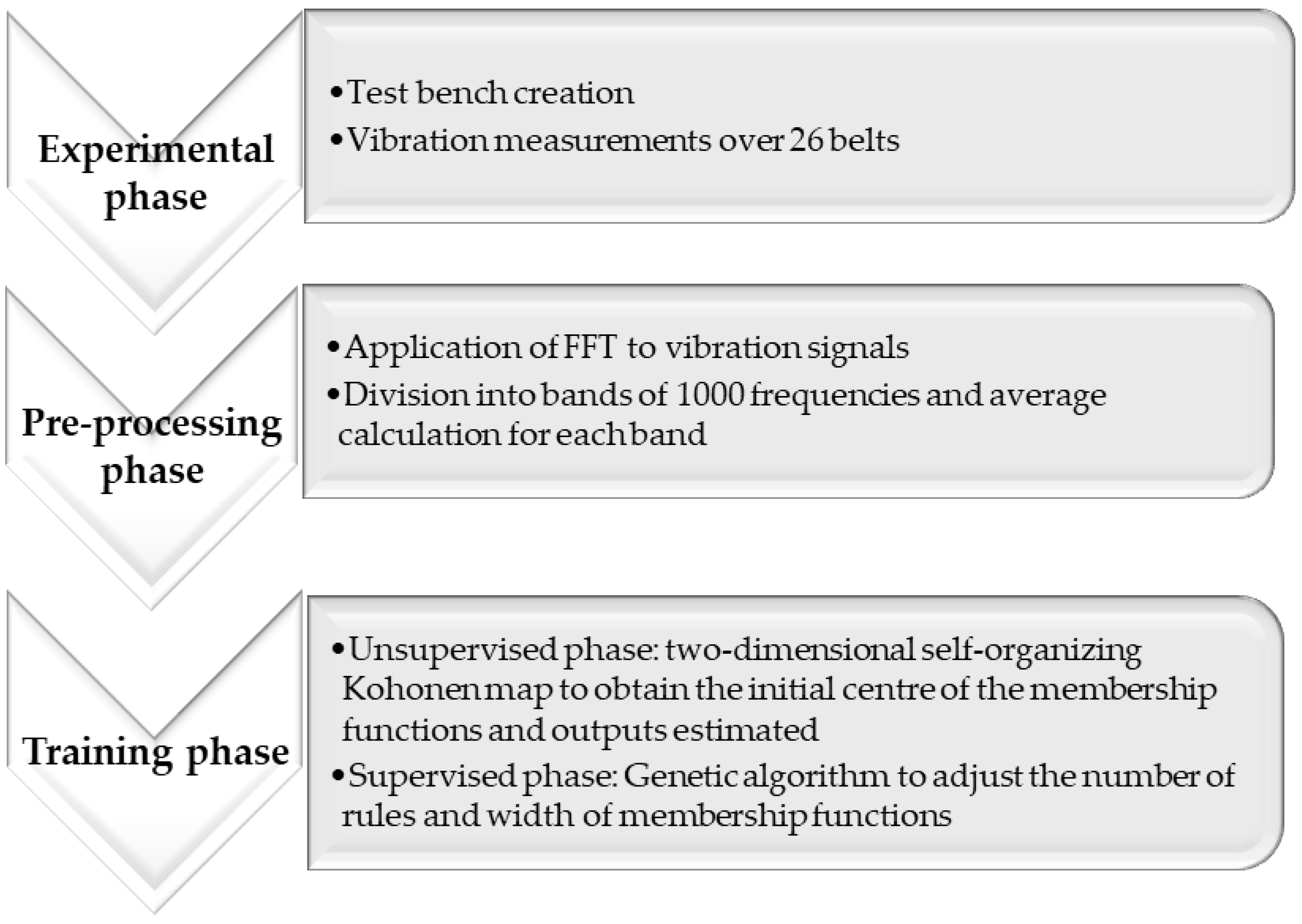
2. Materials and Methods
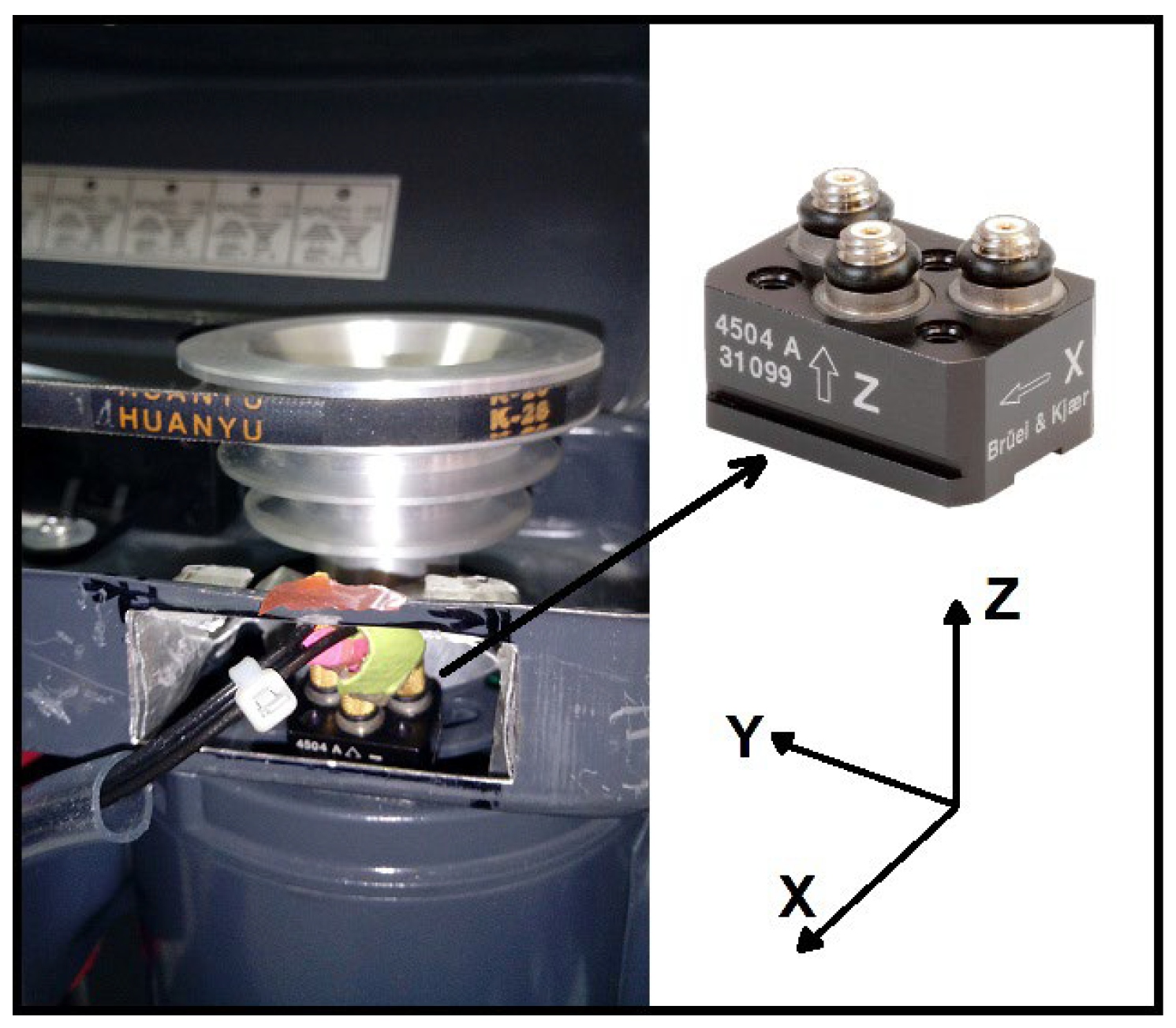
2.1. Experimental Bench
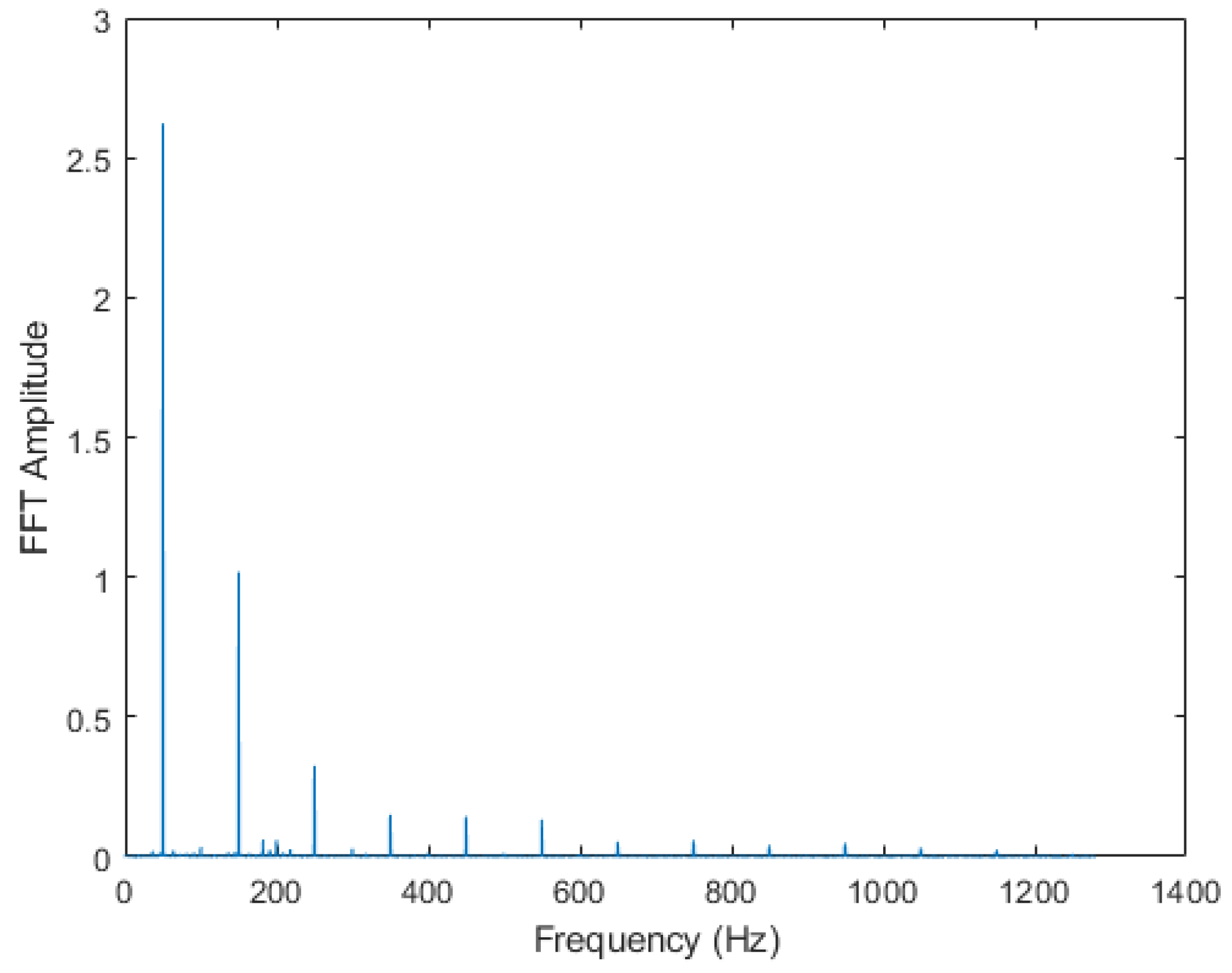
2.2. Signal Processing and Intelligent Method
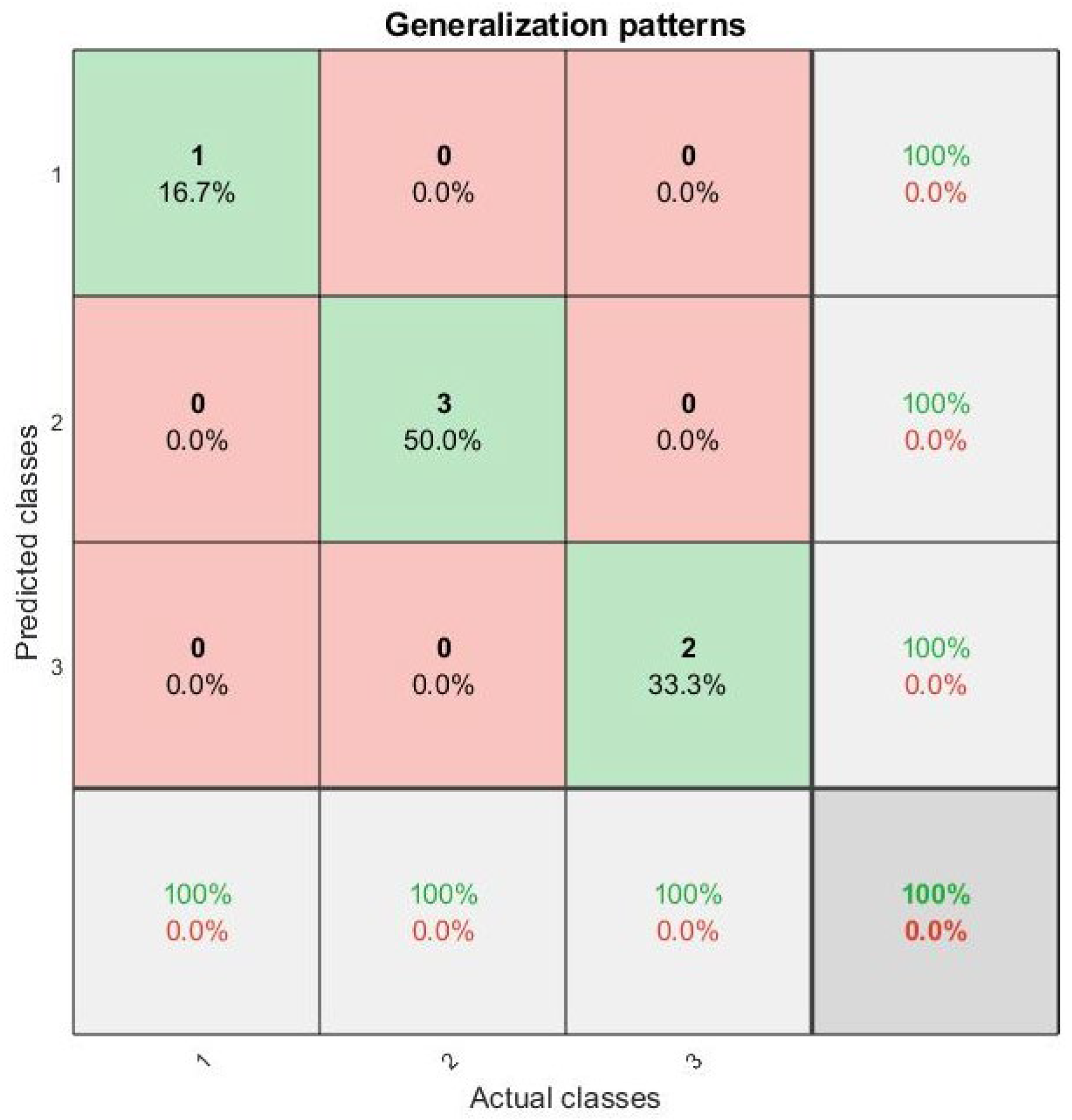
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cañas, H.; Mula, J.; Díaz-Madroñero, M.; Campuzano-Bolarín, F. Implementing Industry 4.0 principles. Comput. Ind. Eng. 2021, 158, 107379. [Google Scholar] [CrossRef]
- Zonta, T.; Da Costa, C.A.; da Rosa Righi, R.; de Lima, M.J.; da Trindade, E.S.; Li, G.P. Predictive maintenance in the Industry 4.0: A systematic literature review. Comput. Ind. Eng. 2020, 150, 106889. [Google Scholar] [CrossRef]
- Selcuk, S. Predictive maintenance, its implementation and latest trends. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2016, 231, 1670–1679. [Google Scholar] [CrossRef]
- Mafla, C.; Castejon, C.; Rubio, H. Mantenimiento predictivo en tractores agrícolas. Propuesta de metolodogía orientada al mantenimiento conectado. Rev. Iberoam. Ing. 2022, 26, 63–76. [Google Scholar]
- Ghobakhloo, M. Industry 4.0, digitization, and opportunities for sustainability. J. Clean. Prod. 2020, 252, 119869. [Google Scholar] [CrossRef]
- Carvalho, R.; Nascimento, R.; D’angelo, T.; Delabrida, S.; Bianchi, A.G.C.; Oliveira, R.A.R.; Azpúrua, H.; Garcia, L.G.U. A UAV-Based Framework for Semi-Automated Thermographic Inspection of Belt Conveyors in the Mining Industry. Sensors 2020, 20, 2243. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.; Zhu, W.; Fan, W. Dynamic modeling, simulation and experiment of power transmission belt drives: A systematic review. J. Sound Vib. 2020, 491, 115759. [Google Scholar] [CrossRef]
- Pollak, A.; Temich, S.; Ptasiński, W.; Kucharczyk, J.; Gąsiorek, D. Prediction of Belt Drive Faults in Case of Predictive Maintenance in Industry 4.0 Platform. Appl. Sci. 2021, 11, 10307. [Google Scholar] [CrossRef]
- Bonci, A.; Longhi, S.; Nabissi, G. Fault Diagnosis in a belt-drive system under non-stationary conditions. An industrial case study. In Proceedings of the IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021. [Google Scholar]
- Szurgacz, D.; Zhironkin, S.; Vöth, S.; Pokorný, J.; Spearing, A.J.S.; Cehlár, M.; Stempniak, M.; Sobik, L. Thermal Imaging Study to Determine the Operational Condition of a Conveyor Belt Drive System Structure. Energies 2021, 14, 3258. [Google Scholar] [CrossRef]
- Liu, X.; Pei, D.; Lodewijks, G.; Zhao, Z.; Mei, J. Acoustic signal based fault detection on belt conveyor idlers using machine learning. Adv. Powder Technol. 2020, 31, 2689–2698. [Google Scholar] [CrossRef]
- Popescu, T.D.; Aiordachioaie, D.; Culea-Florescu, A. Basic tools for vibration analysis with applications to predictive maintenance of rotating machines: An overview. Int. J. Adv. Manuf. Technol. 2022, 118, 2883–2899. [Google Scholar] [CrossRef]
- DHyun, D.; Kang, T.-J.; Kim, J. Fault Diagnosis of Belt Driving Power Transfer Facility Using Vibration Analysis. J. Electr. Eng. Technol. 2021, 16, 2257–2264. [Google Scholar]
- Nabhan, M.; El-Sharkawy, M.R.; Rashed, A. Monitoring of belt-drive defects using the vibration signals and simulation models. In Proceedings of the 20th International Conference on Innovations in Engineering and Technology Research, Roma, Italy, 20 November 2019. [Google Scholar]
- Pałczyński, K.; Skibicki, D.; Pejkowski, Ł.; Andrysiak, T. Application of machine learning methods in multiaxial fatigue life prediction. Fatigue Fract. Eng. Mater. Struct. 2023, 46, 416–432. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Y. Fatigue modeling using neural networks: A comprehensive review. Fatigue Fract. Eng. Mater. Struct. 2022, 45, 945–979. [Google Scholar] [CrossRef]
- Gao, J.; Heng, F.; Yuan, Y.; Liu, Y. A novel machine learning method for multiaxial fatigue life prediction: Improved adaptive neuro-fuzzy inference system. Int. J. Fatigue 2023, 178, 108007. [Google Scholar] [CrossRef]
- Abiodun, I.; Jantan, A.; Omolara, A.E.; Dada, K.V.; Mohamed, N.A.; Arshad, H. State-of-the-art in artificial neural network applications: A survey. Heliyon 2018, 4, e00938. [Google Scholar] [CrossRef]
- Marichal, G.N.; Del Castillo, M.L.; López, J.; Padrón, I.; Artés, M. Diagnóstico de engranajes en sistemas de propulsión marinos utilizando técnicas ANFIS. Rev. Iberoam. DIng. Mecánica 2016, 20, 37–47. [Google Scholar]
- Abdulshahed, A.M.; Longstaff, A.P.; Fletcher, S. The application of ANFIS prediction models for thermal error compensation on CNC machine tools. Appl. Soft Comput. 2015, 27, 158–168. [Google Scholar] [CrossRef]
- Cordón, O.; Herrera, F.; Gomide, F.; Hoffmann, F.; Magdalena, L. Ten years of genetic fuzzy systems: Current framework and new trends. In Proceedings of the Joint 9th IFSA World Congress and 20th NAFIPS International Conference (Cat. No. 01TH8569), Vancouver, BC, Canada, 25–28 July 2001. [Google Scholar]
- Marichal, G.; Ávila, D.; Hernández, A.; Padrón, I.; Castejón, C. Feature Extraction from Indirect Monitoring in Marine Oil Separation Systems. Sensors 2018, 18, 3159. [Google Scholar] [CrossRef]
- Khalid, H.M.; Khoukhi, A.; Al-Sunni, F.M. Fault Detection and Classification Using Kalman Filter and Genetic Neuro; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Akpofure, N. A neuro-genetic fuzzy system for the prediction of student’s academic performance. Asian J. Multidimens. Res. 2022, 11, 214–232. [Google Scholar]
- Nobre, F. Genetic-neuro-fuzzy systems: A promising fusion. In Proceedings of the IEEE International Conference Fuzzy Systems, Yokohama, Japan, 20–24 March 1995. [Google Scholar]
- Marichal, G.; Acosta, L.; Moreno, L.; Méndez, J.; Rodrigo, J.; Sigut, M. Obstacle avoidance for a mobile robot: A neuro-fuzzy approach. Fuzzy Sets Syst. 2001, 124, 171–179. [Google Scholar] [CrossRef]
- Jang, J. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Kohonen, T. The Self-Organizing Map; IEEE: Piscataway, NJ, USA, 1990. [Google Scholar]
- Rajasekaran, S.; Pai, G. Neural Networks, Fuzzy Logic and Genetic Algorithm: Synthesis and Applications; PHI Learning Pvt. Ltd.: Delhi, India, 2003. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Value |
|---|---|
| Power | 350 W |
| Voltage | 230 V |
| Amperage | 1.5 A |
| Electrical current frequency | 50 Hz |
| Speed, synchronous (50 Hz) | 1420 RPM |
| Number of Classifier Output | |||
|---|---|---|---|
| 1 | 2 | 3 | |
| New belt | 1 | 0 | 0 |
| Half-used belt | 0 | 1 | 0 |
| Close-to-breaking belt | 0 | 0 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marichal, G.N.; Hernández, Á.; Ávila, D.; García-Prada, J.C. Classification of Belts Status Based on an Automatic Generator of Fuzzy Rules Base System. Appl. Sci. 2024, 14, 1831. https://doi.org/10.3390/app14051831
Marichal GN, Hernández Á, Ávila D, García-Prada JC. Classification of Belts Status Based on an Automatic Generator of Fuzzy Rules Base System. Applied Sciences. 2024; 14(5):1831. https://doi.org/10.3390/app14051831
Chicago/Turabian StyleMarichal, Graciliano Nicolás, Ángela Hernández, Deivis Ávila, and Juan Carlos García-Prada. 2024. "Classification of Belts Status Based on an Automatic Generator of Fuzzy Rules Base System" Applied Sciences 14, no. 5: 1831. https://doi.org/10.3390/app14051831