
GPU Accelerated Processing Method for Feature Point Extraction and Matching in Satellite SAR Images

Abstract
:1. Introduction
2. Baseline Algorithm, SAR–SIFT: A SIFT-like Algorithm for SAR Images
2.1. Scale Space Construction
2.2. Key Point Detection
2.3. Principal Orientation Determination
2.4. Feature Descriptor Construction
3. Methodology
3.1. GPU Mapping Implementation of SAR–SIFT Algorithm
- GPU Mapping for Scale Space Construction
| Algorithm 1: The natural order of kernel invocations |
| For all scales from 1 to S do |
| Calculate the mean convolution kernel of the current scale; Calculate the current scale exponential convolution kernel; Using GPU to perform convolution operation; Calculate the ratio gradient of the current scale; |
| End for |
- 2.
- GPU Accelerated Key Point Detection
- 3.
- GPU-Accelerated Key Point Orientation Assignment and Feature Description
3.2. Multi-GPU Cooperative Acceleration Strategy for SAR Image Matching in Large Area
- (1)
- Image matching requires a large number of cumulative calls. If a single GPU node is used for serial processing, assuming that the image matching time after GPU acceleration is T seconds, serial processing is required seconds, when the number of images (N) is large, the overall image matching time is longer. Therefore, how to reasonably allocate multiple GPU nodes to accelerate multiple image matching is a major problem.
- (2)
- In hundreds of SAR images, the imaging mode (bunching, stripe, etc.), imaging angle (different incidence angles, lift rails), imaging resolution, and imaging width may be different, so SAR image matching needs various GPU computation resources. If the memory of a single GPU node is exceeded, block processing is required. If it is much smaller than the memory of a single GPU node, it will cause a significant waste of GPU resources. Therefore, how to reasonably allocate GPU node memory is also a big problem.
- (3)
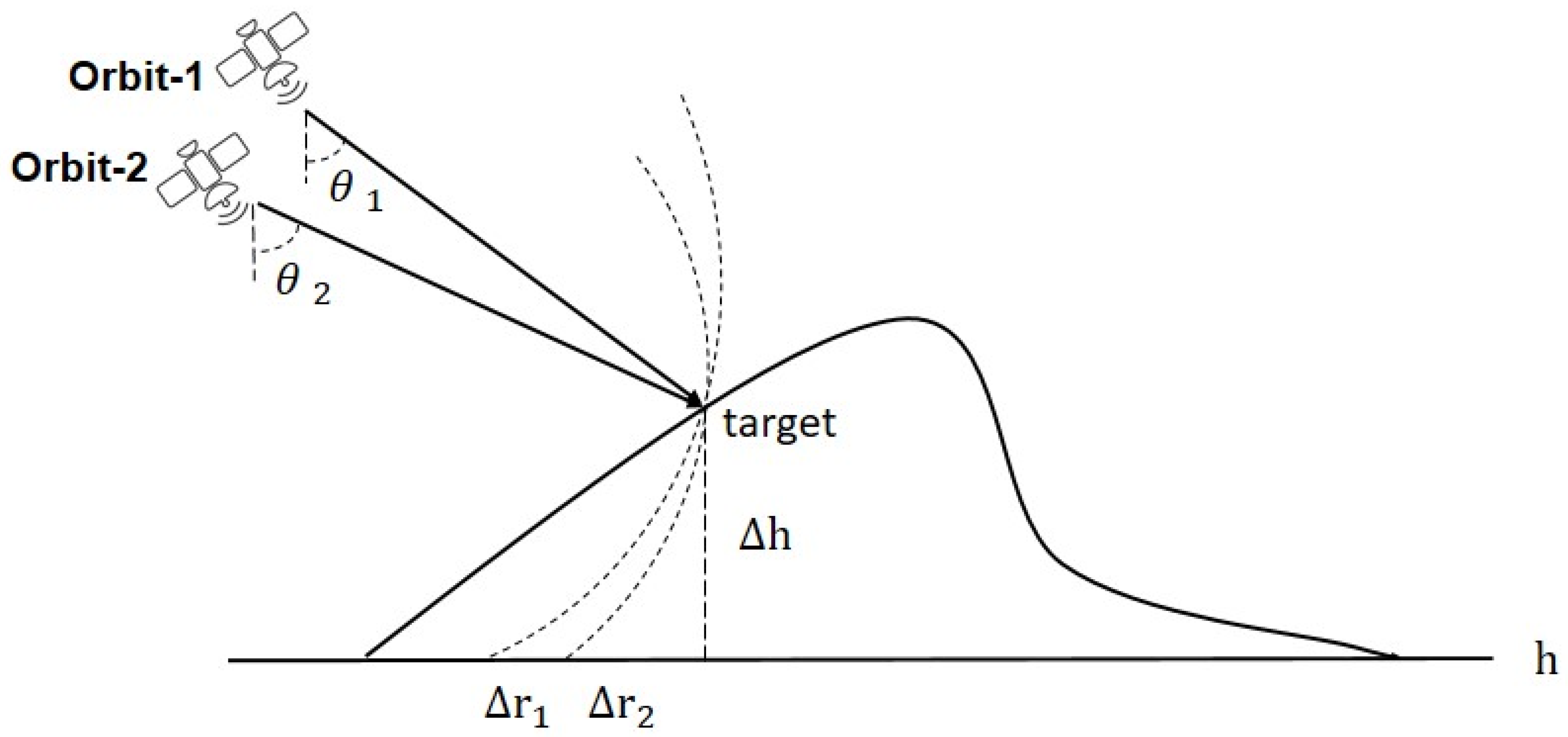
- The processing efficiency of SAR image matching is different for different ground objects. For example, for flat terrain areas, the similarity between SAR images is high, and the repetition rate of key point detection is also high, so key point matching can quickly retrieve the corresponding matching points, and the processing efficiency is high. For areas with topographic relief, since the SAR image is a side view image, the distortion and distortion introduced by topographic relief will significantly reduce the repetition rate of key points, so the key point search efficiency is also low, resulting in the overall processing efficiency being slow, as shown in Figure 2. Therefore, how to reasonably allocate GPU nodes according to the different matching efficiencies brought by different figure types is also a big problem.
- (1)
- Standardized processing of image data to be matched based on upper limit of GPU node memory
- (2)
- Dynamic adjustment of optimal size of image to be matched considering ground object type
- (3)
- Accelerating strategy based on multi-GPU node cooperative parallelism
4. Experiment and Analysis
4.1. Experimental Data and Platform
4.2. Experimental Results
- (1)
- Implementation of SAR–SIFT algorithm for single CPU server nodeThis experiment uses a single CPU server node (without a GPU card), and the configuration of the subsequent experimental server nodes is consistent except for the absence of a GPU card. The implementation experiment of the CPU-based SAR–SIFT algorithm is carried out, and the time for extracting and matching 21 scenes GF-3 SAR images is counted as the benchmark algorithm, which is used to achieve GPU mapping with the proposed SAR-SIFT algorithm, the multi-GPU collaborative acceleration strategy and acceleration strategy for SAR image matching in large regions.
- (2)
- Implementation of SAR–SIFT algorithm for single GPU server nodeThis experiment uses one GPU server node (including one GPU card) to carry out an experiment on the implementation of the SAR–SIFT algorithm based on a single GPU card. The time required for feature point extraction and matching 21 scenes GF-3 SAR images is counted to verify the acceleration efficiency of GPU mapping based on the SAR–SIFT algorithm in Section 3.1.
- (3)
- Implementation of SAR–SIFT algorithm for multiple image standardization acceleration of single GPU server nodeThis experiment uses one GPU server node (including one GPU card) to carry out a SAR–SIFT algorithm implementation experiment based on multiple image standardization acceleration using a single GPU card. The time required for feature point extraction and matching 21 scenes GF-3 SAR images is counted to verify the standardization processing of the image data to be matched based on the GPU memory upper limit in the multi-GPU collaborative acceleration strategy for SAR image matching towards large areas in Section 3.2.
- (4)
- Implementation of SAR–SIFT algorithm for multiple image standardization acceleration of four GPU server nodesThis experiment uses 4 server nodes (8 GPU cards in total) to carry out the SAR–SIFT algorithm implementation experiment based on multiple image standardization acceleration using 8 GPU cards. The experiment calculates the time required for feature point extraction and matching 21 scenes GF-3 SAR images to verify the effectiveness of the multi-GPU nodes collaborative acceleration strategy based on multi-GPU nodes collaborative parallel in Section 3.2 of SAR image matching for large areas.
- (5)
- Implementation of SAR–SIFT algorithm for multiple image standardization acceleration of 16 GPU server nodesThis experiment uses 16 server nodes (32 GPU cards in total) to carry out the SAR–SIFT algorithm implementation experiment based on multiple image standardization acceleration using 32 GPU cards. The experiment calculates the time required for feature point extraction and matching 21 scenes GF-3 SAR images, to verify the effectiveness of the multi-GPU nodes collaborative acceleration strategy based on multi-GPU nodes collaborative parallel in Section 3.2 of SAR image matching for large areas.
4.3. Analysis of Experimental Results
- (1)
- When matching SAR images for a single node, the SAR–SIFT algorithm after GPU processing is nearly 96% higher than that of the single CPU node SAR–SIFT algorithm. After the improvement of the GPU algorithm, the performance of single-node GPU optimization algorithm is improved by 97%, which shows the effectiveness of the optimization strategy of the SAR–SIFT algorithm based on GPU mapping;
- (2)
- After multi-node processing, SAR image matching performance has been significantly improved. After 16-node parallelism, the GPU optimization algorithm based on multi-node parallelism has improved by 99.75% compared with the traditional single-node CPU, which shows the effectiveness of the multi-node parallelism strategy.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parallelization Strategy | 5 Scenes | 10 Scenes | 15 Scenes | 21 Scenes |
|---|---|---|---|---|
| Single node CPU | 932.56 | 1848.73 | 3484.66 | 5268.59 |
| Single node GPU | 34.73 | 68.99 | 125.43 | 189.98 |
| Single node GPU optimization | 27.49 | 52.85 | 98.49 | 147.49 |
| Four nodes GPU optimization | 8.62 | 13.21 | 27.09 | 51.45 |
| Sixteen nodes CPU optimization | 2.93 | 4.77 | 9.35 | 13.62 |
4.4. Discussion
5. Conclusions
- (1)
- After single-node GPU matching, the feature point extraction and matching of GF-3 satellite SAR images improved by about 96%, verifying the effectiveness of the optimization strategy implemented by the SAR–SIFT algorithm based on GPU mapping.
- (2)
- After multi-GPU nodes processing, the feature point extraction and matching of GF-3 satellite SAR images improved by about 99.75%, verifying the effectiveness of the multi-GPU nodes parallelization strategy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chan, Y.K.; Koo, V. An introduction to synthetic aperture radar (SAR). Prog. Electromagn. Res. B 2008, 2, 27–60. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- Du, Z.; Li, X.; Miao, J.; Huang, Y.; Shen, H.; Zhang, L. Concatenated Deep Learning Framework for Multi-task Change Detection of Optical and SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 17, 719–731. [Google Scholar] [CrossRef]
- Gong, M.; Zhou, Z.; Ma, J. Change detection in synthetic aperture radar images based on image fusion and fuzzy clustering. IEEE Trans. Image Process. 2011, 21, 2141–2151. [Google Scholar] [CrossRef]
- McNairn, H.; Shang, J. A review of multitemporal synthetic aperture radar (SAR) for crop monitoring. Multitemporal Remote Sens. Methods Appl. 2016, 20, 317–340. [Google Scholar]
- Zhao, H.; Jia, J.; Koltun, V. Exploring self-attention for image recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10076–10085. [Google Scholar]
- Jin, Y.; Mishkin, D.; Mishchuk, A.; Matas, J.; Fua, P.; Yi, K.M.; Trulls, E. Image matching across wide baselines: From paper to practice. Int. J. Comput. Vis. 2021, 129, 517–547. [Google Scholar] [CrossRef]
- Yao, G.B.; Zhang, C.C.; Gong, J.Y.; Zhang, X.J.; Li, B. Automatic Registration of Optical and SAR Images Based on Nonlinear Scale-Space Enhancement. Geomat. Inf. Sci. Wuhan Univ. 2023. [Google Scholar]
- Gong, M.; Zhao, S.; Jiao, L.; Tian, D.; Wang, S. A novel coarse-to-fine scheme for automatic image registration based on SIFT and mutual information. IEEE Trans. Geosci. Remote Sens. 2013, 52, 4328–4338. [Google Scholar] [CrossRef]
- Woo, J.; Stone, M.; Prince, J.L. Multimodal registration via mutual information incorporating geometric and spatial context. IEEE Trans. Image Process. 2014, 24, 757–769. [Google Scholar] [CrossRef]
- Eltanany, A.S.; Amein, A.S.; Elwan, M.S. A modified corner detector for SAR images registration. Int. J. Eng. Res. Afr. 2021, 53, 123–156. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. Lect. Notes Comput. Sci. 2006, 3951, 404–417. [Google Scholar]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; pp. 1150–1157. [Google Scholar]
- Mikolajczyk, K.; Schmid, C. A performance evaluation of local descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Ni, W.; Yan, W.; Xiang, D.; Wu, J.; Yang, X.; Bian, H. Registration of multimodal remote sensing image based on deep fully convolutional neural network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3028–3042. [Google Scholar] [CrossRef]
- Schwind, P.; Suri, S.; Reinartz, P.; Siebert, A. Applicability of the SIFT operator to geometric SAR image registration. Int. J. Remote Sens. 2010, 31, 1959–1980. [Google Scholar] [CrossRef]
- Wang, F.; You, H.; Fu, X. Adapted anisotropic Gaussian SIFT matching strategy for SAR registration. IEEE Geosci. Remote Sens. Lett. 2014, 12, 160–164. [Google Scholar] [CrossRef]
- Divya, S.V.; Paul, S.; Pati, U.C. Structure tensor-based SIFT algorithm for SAR image registration. IET Image Process 2020, 14, 929–938. [Google Scholar]
- Wang, M.; Zhang, J.; Deng, K.; Hua, F. Combining optimized SAR-SIFT features and RD model for multisource SAR image registration. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5206916. [Google Scholar] [CrossRef]
- Deng, Y.; Deng, Y. Two-Step Matching Approach to Obtain More Control Points for SIFT-like Very-High-Resolution SAR Image Registration. Sensors 2023, 23, 3739. [Google Scholar] [CrossRef]
- Xiang, Y.; Wang, F.; You, H. An Automatic and Novel SAR Image Registration Algorithm: A Case Study of the Chinese GF-3 Satellite. Sensors 2018, 18, 672. [Google Scholar] [CrossRef]
- Xiang, Y.; Jiao, N.; Liu, R.; Wang, F.; You, H.; Qiu, X.; Fu, K. A Geometry-Aware Registration Algorithm for Multiview High-Resolution SAR Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5234818. [Google Scholar] [CrossRef]
- Wang, L.; Xiang, Y.; You, H.; Qiu, X.; Fu, K. A Robust Multiscale Edge Detection Method for Accurate SAR Image Registration. IEEE Geosci. Remote Sens. Lett. 2023, 20, 4006305. [Google Scholar] [CrossRef]
- Hong, Y.; Leng, C.; Zhang, X.; Yan, H.; Peng, J.; Jiao, L.; Cheng, I.; Basu, A. SAR Image Registration Based on ROEWA-Blocks and Multiscale Circle Descriptor. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10614–10627. [Google Scholar] [CrossRef]
- Wang, Z.; Cai, C.; Deng, M.; Zhang, D.; Li, Z. Rapid Subpixel Matching Method for Spaceborne Synthetic Aperture Radar Images. Sens. Mater. 2022, 34, 4705–4715. [Google Scholar] [CrossRef]
- Chang, Y.; Xu, Q.; Xiong, X.; Jin, G.; Hou, H.; Man, D. SAR image matching based on rotation-invariant description. Sci. Rep. 2023, 13, 14510. [Google Scholar] [CrossRef]
- Qian, H.; Yue, J.W.; Chen, M. Research progress on feature matching of SAR and optical images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 42, 77–82. [Google Scholar] [CrossRef]
- Podlozhnyuk, V. Histogram calculation in CUDA. NVIDIA Corporation, White Paper. 2007. Available online: https://developer.download.nvidia.com/compute/cuda/1.1-Beta/x86_website/projects/histogram64/doc/histogram.pdf (accessed on 19 January 2024).







| S/N | Image Identification | Angle of Incidence (°) | Average Elevation (m) | Ground Sampling Interval (m) | Imaging Time |
|---|---|---|---|---|---|
| 1 | GF3-15230-1 | 37.16 | 17.31 | 1.12 × 1.54 | 2 July 2019 |
| 2 | GF3-15230-2 | 17.24 | |||
| 3 | GF3-15230-3 | 69.52 | |||
| 4 | GF3-15230-4 | 234.57 | |||
| 5 | GF3-15230-5 | 167.94 | |||
| 6 | GF3-15230-6 | 66.17 | |||
| 7 | GF3-15230-7 | 28.26 | |||
| 8 | GF3-15230-8 | 15.37 | |||
| 9 | GF3-27350-1 | 36.31 | 35.67 | 1.12 × 1.73 | 20 October 2021 |
| 10 | GF3-27350-2 | 342.94 | |||
| 11 | GF3-27350-3 | 1156.29 | |||
| 12 | GF3-27350-4 | 1366.71 | |||
| 13 | GF3-27350-5 | 968.64 | |||
| 14 | GF3-27076-1 | 19.99 | 3.24 | 1.12 × 1.75 | 1 October 2021 |
| 15 | GF3-27076-2 | 21.38 | |||
| 16 | GF3-27076-3 | 879.94 | |||
| 17 | GF3-27076-4 | 1361.97 | |||
| 18 | GF3-27076-5 | 677.02 | |||
| 19 | GF3-27076-6 | 259.56 | |||
| 20 | GF3-27076-7 | 15.04 | |||
| 21 | GF3-27076-8 | 1.53 |
| Item | Type | Model Parameters |
|---|---|---|
| CPU configuration | CPU frequency | 2.6 GHz |
| Number of CPUs | 2 | |
| Number of CPU cores | 48 cores | |
| CPU Number of threads | 48 threads | |
| Memory configuration | Memory type | DDR4 |
| Total memory capacity | 768 GB | |
| SSD hard disk configuration | Number of SSD hard disk blocks | 1 piece |
| SSD hard disk capacity | 256 GB | |
| GPU card configuration | Number of GPUs | 2 pieces |
| GPU model | NVIDIA A100 PCIE | |
| GPU computing performance | 19.5 TFLOPS | |
| GPU node memory capacity | 40 GB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, L.; Jiao, N.; Zhang, T.; Liu, F.; You, H. GPU Accelerated Processing Method for Feature Point Extraction and Matching in Satellite SAR Images. Appl. Sci. 2024, 14, 1528. https://doi.org/10.3390/app14041528
Dong L, Jiao N, Zhang T, Liu F, You H. GPU Accelerated Processing Method for Feature Point Extraction and Matching in Satellite SAR Images. Applied Sciences. 2024; 14(4):1528. https://doi.org/10.3390/app14041528
Chicago/Turabian StyleDong, Lei, Niangang Jiao, Tingtao Zhang, Fangjian Liu, and Hongjian You. 2024. "GPU Accelerated Processing Method for Feature Point Extraction and Matching in Satellite SAR Images" Applied Sciences 14, no. 4: 1528. https://doi.org/10.3390/app14041528