


Comparative Analysis of Deterministic Fundamental Diagrams Representative of Continuous and Interrupted Traffic Flow on Selected Regional Road in Croatia

Abstract
:1. Introduction
- H0 (Null Hypothesis): There is no statistically significant difference in the speed–density and flow–density functional relationships obtained for continuous and periodically interrupted traffic flow conditions on the representative road segments of the selected regional road, and therefore, the same mathematical formulation of “speed–density” and “flow–density” models can be used for modeling traffic flow characteristics on the observed regional road, both in continuous and interrupted traffic stream conditions.
- H1 (Alternative Hypothesis): There is a statistically significant difference in the speed–density and flow–density functional relationships obtained for continuous and periodically interrupted traffic flow conditions on the representative road segments of the selected regional road, and therefore, two alternative mathematical formulations of the “speed–density” and “flow–density” models need to be used to separately model the traffic flow characteristics under continuous and interrupted traffic stream conditions on the observed regional road.
2. Literature Review
3. Spatial and Temporal Scope of Research
- Road section A: The road section of regional road ŽC5210, spanning from a three-leg unsignalized intersection (connecting regional road ŽC5210 to Čiponjac South Street) to a four-leg roundabout (linking regional road ŽC5210 with state road D106), covering 310 m. The traffic flows were recorded on a straight section of this road, sufficiently distanced from adjacent intersections to ensure that all empirical traffic flow parameter values, representative of continuous traffic stream conditions, could be accurately extracted from the captured video files.
- Road section B: The road section of regional road ŽC5210, situated near a signalized intersection (connecting regional road ŽC5210 to Caskin Way Street), 205 m in length. The traffic flows were recorded on a straight segment of the road, directly adjacent to the four-leg signalized intersection to ensure that the empirical traffic flow parameter values, indicative of interrupted traffic stream conditions, could be accurately extracted from the captured video files.
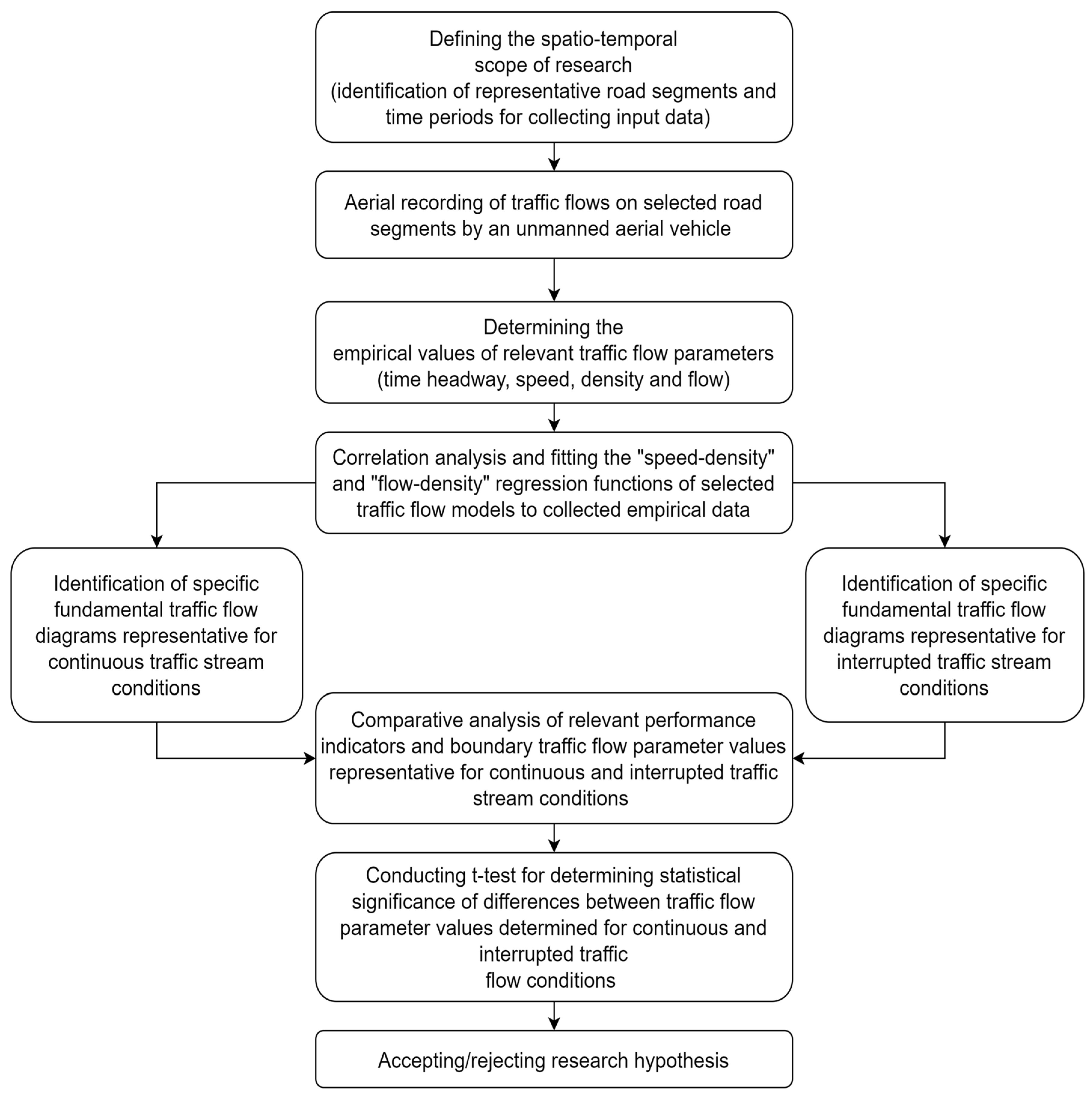
4. Methodology of Research
4.1. Defining the Spatio-Temporal Scope of Research
4.2. Capturing and Processing Aerial Video
4.3. Determining the Empirical Values of Relevant Traffic Flow Parameters
4.4. Comparative Analysis, Calibration and Fitting the Deterministic “Speed–Density” and “Flow–Density” Fundamental Traffic Flow Diagrams to Collected Empirical Data
- “Speed–Density” and “Flow–Density” regression functions obtained using the overall statistical sample collected containing all empirical values of traffic flow parameters determined both under continuous and interrupted traffic stream conditions;
- “Speed–Density” and “Flow–Density” regression functions developed based on the partial empirical sample collected under continuous traffic stream conditions on the open road segment (road segment A); and
- “Speed–Density” and “Flow–Density” regression functions developed based on the partial empirical sample collected under interrupted traffic stream conditions on the road segment with signalized intersection (road segment B).
5. Results
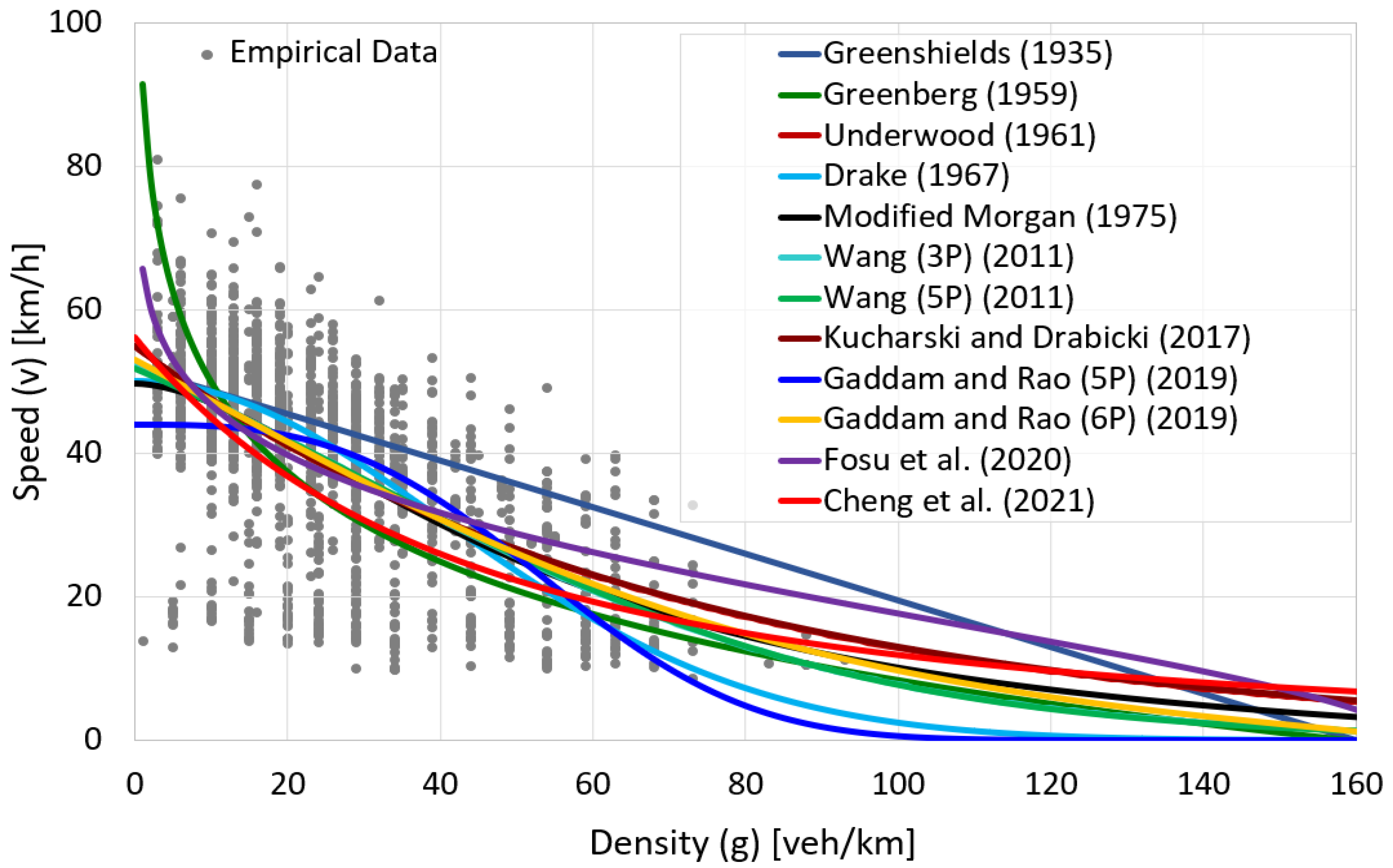
5.1. Results of the Comparative and Regression Analysis of Selected “Speed–Density” Models Fitted to Empirical Data Contained in Overall Statistical Sample
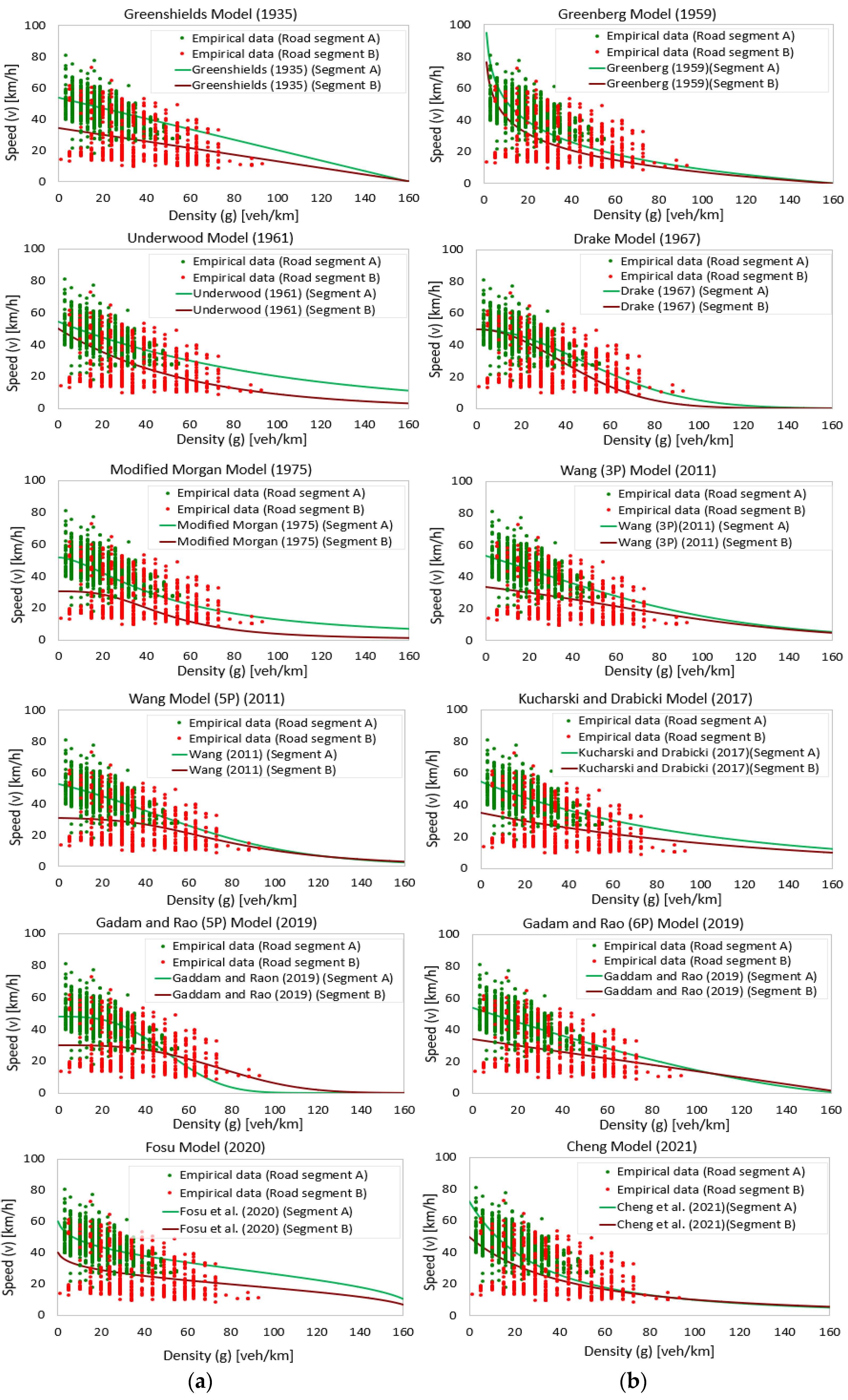
5.2. Results of the Comparative and Regression Analysis of Selected “Speed–Density” Models Fitted to Empirical Data Contained in Partial Statistical Samples Collected under Continuous and Interrupted Traffic Stream Conditions
6. Discussion
6.1. Discussion on the Comparative Analysis of Selected “Speed–Density” Models Fitted to Empirical Data Collected under Continuous and Interrupted Traffic Stream Conditions
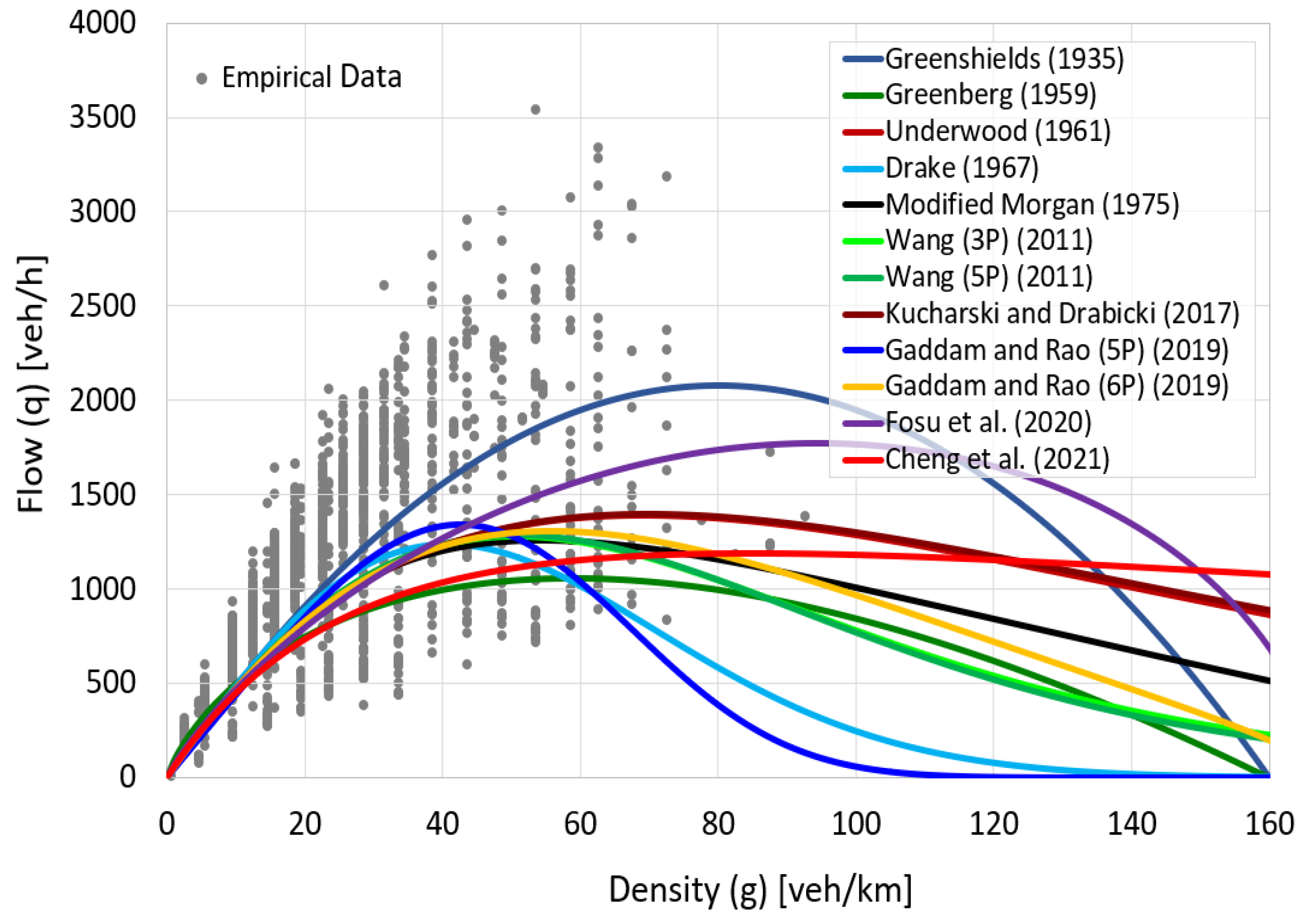
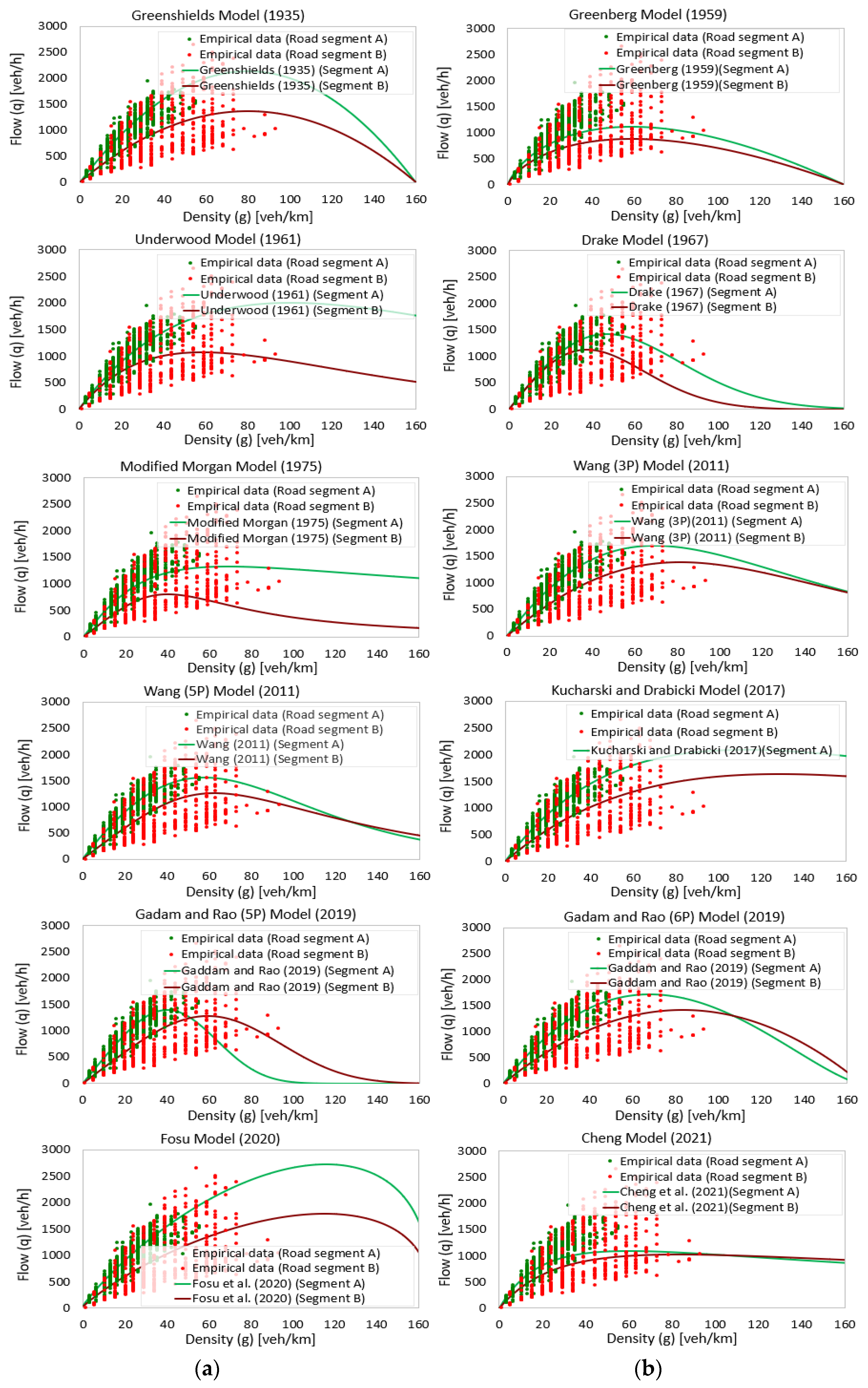
6.2. Discussion on the Comparative Analysis of Selected “Flow–Density” Models Fitted to Empirical Data Collected under Continuous and Interrupted Traffic Stream Conditions
6.3. Discussion on the Results of the t-Tests Conducted
7. Conclusions
- Based on the comparative analysis of R-squared values determined for the twelve traffic flow models considered fitted to empirical data collected under continuous and interrupted traffic stream conditions, it is revealed that Wang’s five-parameter sigmoid model best fits the empirical data, with Pearson’s correlation coefficient of 0.6191 and coefficient of determination of 0.3833.
- The results obtained indicate that the practical road capacity value representative of continuous and interrupted traffic stream conditions varies significantly depending on the selected model and prevailing traffic stream conditions. The practical capacity of the observed regional road, determined by twelve calibrated traffic flow models, ranges from 1084 to 2333 veh/h/lane under continuous and from 799 to 1793 veh/h/lane under interrupted traffic stream conditions. Depending on the traffic flow model considered, the practical road capacity under interrupted traffic stream conditions is 5–46.4% lower than under continuous traffic stream conditions, while the relative difference in free-flow speed values representative of modeling traffic flow characteristics under continuous and interrupted traffic stream conditions can reach up to 41.3%.
- The practical capacity of the observed regional road is reached at significantly different levels of traffic density when comparing continuous and interrupted traffic stream conditions. Depending on the selected model, the saturation traffic flow density value for continuous traffic flow conditions ranges between 40 and 117 veh/km/lane, while in interrupted traffic flow conditions, it ranges between 37 and 129 veh/km.
- The statistical significance of the differences in mean speed, mean hourly vehicle flow and mean traffic flow density values determined for continuous and interrupted traffic flow conditions by the proposed “speed–density” and “flow–density” models is confirmed by the t-tests conducted.
- We reject the Null Hypothesis (H0) and confirm the Alternative Hypothesis (H1) that there is a statistically significant difference in the speed–density and flow–density functional relationships obtained for continuous and periodically interrupted traffic flow conditions on the representative road segments of the selected regional road, and therefore, we conclude that two alternative mathematical formulations of the “speed–density” and “flow–density” models need to be used to separately model the traffic flow characteristics present under continuous and interrupted traffic stream conditions.
- The empirical samples used in this research to identify representative deterministic “speed–density” and “flow–density” models were gathered over relatively short periods and exclusively on the two representative road segments of ŽC5210 regional road. All of the models considered were fitted to an empirical sample, which did not include the empirical traffic flow parameter values measured in a congested traffic flow condition, i.e., at traffic flow densities higher than 93.00 veh/km.
- Twelve traffic flow models selected were fitted directly to disaggregated empirical data collected on the two observed road sections of regional road ŽC5210 in the Republic of Croatia. The impacts of higher levels of time aggregation of the observed traffic flow parameter empirical values on the shape of regression functions used to describe the relations between average traffic flow parameter values were not considered in this research.
- The impact of traffic flow structure, road environment characteristics, relevant road design and road infrastructure elements on the shapes of the obtained “speed–density” and “flow–density” regression functions was not considered in the scope of this research.
- Future research should prioritize the collection of extensive statistical sample with a sufficient number of empirical values of traffic flow parameters measured in a congested traffic flow condition. Based on such sample, it would be possible to further examine the possibility of developing other specific non-linear regression models, which would enable more accurate descriptions of the mathematical relationship between average speed and density values under high-density (unstable) traffic flow conditions.
- In future research, it is also important to investigate the impact of higher levels of time aggregation of the observed traffic flow parameters, as well as the impact of traffic flow structure, road environment characteristics, relevant road design and infrastructure elements and other relevant factors, which possibly contribute to the scattering effect of empirical data visible in the “speed–density” and “flow–density” fundamental diagrams.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- van Wageningen-Kessels, F.; Hoogendoorn, S.P.; Vuik, K.; van Lint, H. Traffic Flow Modeling: A Genealogy. Transp. Res. E-Circ. 2015, E-C195, 1–16. [Google Scholar]
- van Wageningen-Kessels, F.; van Lint, H.; Vuik, K.; Hoogendoorn, S. Genealogy of Traffic Flow Models. EURO J. Transp. Logist. 2015, 4, 445–473. [Google Scholar] [CrossRef]
- Bramich, D.M.; Menéndez, M.; Ambühl, L. Fitting Empirical Fundamental Diagrams of Road Traffic: A Comprehensive Review and Comparison of Models Using an Extensive Data Set. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14104–14127. [Google Scholar] [CrossRef]
- Romanowska, A.; Jamroz, K. Comparison of Traffic Flow Models with Real Traffic Data Based on a Quantitative Assessment. Appl. Sci. 2021, 11, 9914. [Google Scholar] [CrossRef]
- Dahiya, G.; Asakura, Y.; Nakanishi, W. Analysis of the Single-Regime Speed-Density Fundamental Relationships for Varying Spatiotemporal Resolution Using Zen Traffic Data. Asian Transp. Stud. 2022, 8, 100066. [Google Scholar] [CrossRef]
- Zefreh, M.M.; Török, Á. Distribution of Traffic Speed in Different Traffic Conditions: An Empirical Study in Budapest. Transport 2020, 35, 68–86. [Google Scholar] [CrossRef]
- Greenshields, B.D.; Thompson, J.T.; Dickinson, H.C.; Swinton, R.S. The Photographic Method of Studying Traffic Behavior. Highw. Res. Board. Proc. 1934, 13, 382–389. [Google Scholar]
- Greenshields, B.D. Average Speed and Traffic Density as a Measure of Road Capacity. In Proceedings of the Highway Research Board, Washington, DC, USA, 30 November–3 December 1938. [Google Scholar]
- Greenberg, H. An Analysis of Traffic Flow. Oper. Res. 1959, 7, 79–85. [Google Scholar] [CrossRef]
- Underwood, R.T. Speed, Volume and Density Relationships. Qual. Theory Traffic Flow. 1960, 141–188. [Google Scholar]
- Edie, L.C. Car-Following and Steady-State Theory for Noncongested Traffic. Oper. Res. 1961, 9, 66–76. [Google Scholar] [CrossRef]
- Dick, A.C. Speed/Flow Relationships within an Urban Area. Traffic Eng. Control 1966, 8, 393–396. [Google Scholar]
- Drake, J.; Schofer, J.; May, A. A Statistical Analysis of Speed-Density Hypotheses. In Vehicular Traffic Science. Highw. Res. Rec. 1967, 154, 112–117. [Google Scholar]
- Payne, H.J. Models of Freeway Traffic and Control. In Mathematical Models of Public Systems; Simulation Council: San Diego, CA, USA, 1971; Volume 1, pp. 51–61. [Google Scholar]
- Smulders, S. Control of Freeway Traffic Flow by Variable Speed Signs. Transp. Res. Part B Methodol. 1990, 24, 111–132. [Google Scholar] [CrossRef]
- Van Aerde, M.; Rakha, H. Multivariate Calibration of Single-Regime Speed-Flow-Density Relationships. In Proceedings of the Pacific Rim TransTech Conference, 1995 Vehicle Navigation and Information Systems Conference Proceedings, 6th International VNIS, A Ride into the Future, Seattle, WA, USA, 30 July–2 August 1995. [Google Scholar]
- DelCastillo, J.M.; Benítez, F.G. On the Functional Form of the Speed-Density Relationship—I: General Theory. Transp. Res. Part B Methodol. 1995, 29, 373–389. [Google Scholar] [CrossRef]
- Gartner, N.H.; Messer, C.J.L.; Rathi, A. Traffic Flow Theory—A State-of-the-Art Report: Revised Monograph on Traffic Flow Theory; Turner-Fairbank Highway Research Center: McLean, VA, USA, 2002; pp. 30–67. [Google Scholar]
- Chanut, S.; Buisson, C. Macroscopic Model and Its Numerical Solution for Two-Flow Mixed Traffic with Different Speeds and Lengths. Transp. Res. Rec. J. Transp. Res. Board. 2003, 1852, 209–219. [Google Scholar] [CrossRef]
- Helbing, D. Derivation of a Fundamental Diagram for Urban Traffic Flow. Eur. Phys. J. B 2008, 70, 229–241. [Google Scholar] [CrossRef]
- MacNicholas, M.J. A Simple and Pragmatic Representation of Traffic Flow. In Proceedings of the Greenshields Symposium on the 75 Years of the Fundamental Diagram for Traffic Flow Theory, Woods Hole, MA, USA, 8–10 July 2008; pp. 161–177. [Google Scholar]
- Transportation Research Board. Highway Capacity Manual, 5th ed.; Transportation Research Board: Washington, DC, USA, 2010. [Google Scholar]
- Wang, H.; Li, J.; Chen, Q.-Y.; Ni, D. Logistic Modeling of the Equilibrium Speed–Density Relationship. Transp. Res. Part A Policy Pract. 2011, 45, 554–566. [Google Scholar] [CrossRef]
- Horvat, R.; Kos, G.; Ševrović, M. Traffic Flow Modelling on the Road Network in the Cities. Teh. Vjesn.-Tech. Gaz. 2015, 22, 475–486. [Google Scholar] [CrossRef]
- Elefteriadou, L.A. Highway Capacity Manual, 6th ed.; National Academies Press: Washington, DC, USA, 2016; ISBN 978-0-309-46019-4. [Google Scholar]
- National Academies of Sciences; Engineering and Medicine. Highway Capacity Manual, 7th ed.; National Academies Press: Washington, DC, USA, 2022; ISBN 978-0-309-27566-8. [Google Scholar]
- Gaus, A.; Muhammad, T.Y.S.; Ambo, U.S.H.; Liska, N. Mathematical Model of Traffic Speed and Capacity in the Archipelago Base. In Proceedings of the Workshop on Environmental Science, Society, and Technology (WESTECH 2020), Makassar, Indonesia, 16–17 October 2020; IOP Publishing: Bristol, UK, 2020. [Google Scholar]
- Anupriya; Bansal, P.; Graham, D.J. Analytical Representations of the Fundamental Diagram of Traffic Flow for Highways: A Review of Theory and Empirics. SSRN 2022, 1–38. [Google Scholar]
- Qu, X.; Zhang, J.; Wang, S. On the Stochastic Fundamental Diagram for Freeway Traffic: Model Development, Analytical Properties, Validation, and Extensive Applications. Transp. Res. Part B Methodol. 2017, 104, 256–271. [Google Scholar] [CrossRef]
- Ni, D.; Hsieh, H.K.; Jiang, T. Modeling Phase Diagrams as Stochastic Processes with Application in Vehicular Traffic Flow. Appl. Math. Model. 2018, 53, 106–117. [Google Scholar] [CrossRef]
- Thonhofer, E.; Jakubek, S. Investigation of Stochastic Variation of Parameters for a Macroscopic Traffic Model. J. Intell. Transp. Syst. 2018, 22, 547–564. [Google Scholar] [CrossRef]
- Bouadi, M.; Jia, B.; Jiang, R.; Li, X.; Gao, Z.-Y. Stability Analysis of Stochastic Second-Order Macroscopic Continuum Models and Numerical Simulations. arXiv 2022, arXiv:2204.13937. [Google Scholar] [CrossRef]
- May, A.D.; Keller, H.E. Non-Integer Car-Following Models. Highw. Res. Rec. 1967, 199, 19–32. [Google Scholar]
- Pipes, L.A. Car Following Models and the Fundamental Diagram of Road Traffic. Transp. Res. 1967, 1, 21–29. [Google Scholar] [CrossRef]
- Del Castillo, J.M.; Benitez, F.G. On the Functional Form of the Speed-Density Relationship—II: Empirical Investigation. Transp. Res. Part B Methodol. 1995, 29, 391–406. [Google Scholar] [CrossRef]
- Liu, X.; Xu, J.; Li, M.; Wei, L.; Ru, H. General-Logistic-Based Speed-Density Relationship Model Incorporating the Effect of Heavy Vehicles. Math. Probl. Eng. 2019, 2019, 6039846. [Google Scholar] [CrossRef]
- Amirgholy, M.; Nourinejad, M.; Gao, O.H. Optimal Traffic Control at Smart Intersections: Automated Network Fundamental Diagram. Transp. Res. Part B Methodol. 2020, 137, 2–18. [Google Scholar] [CrossRef]
- Fourati, W.; Dabbas, H.; Friedrich, B. Estimation of Penetration Rates of Floating Car Data at Signalized Intersections. Transp. Res. Procedia 2020, 52, 228–235. [Google Scholar] [CrossRef]
- Tilg, G.; Amini, S.; Busch, F. Evaluation of Analytical Approximation Methods for the Macroscopic Fundamental Diagram. Transp. Res. Part C Emerg. Technol. 2020, 114, 1–19. [Google Scholar] [CrossRef]
- Satyajit, M.; Ankit, G. Speed Distribution for Interrupted Flow Facility under Mixed Traffic. Phys. A Stat. Mech. Appl. 2021, 570, 125798. [Google Scholar] [CrossRef]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. Unmanned Aerial Vehicle-Based Traffic Analysis: A Case Study for Shockwave Identification and Flow Parameters Estimation at Signalized Intersections. Remote Sens. 2018, 10, 458. [Google Scholar] [CrossRef]
- Kos, G.; Ševrović, M.; Jović, J. Harmonization and Synchronization Model of Interrupted Traffic Flows on Motorways. Transport 2018, 33, 364–369. [Google Scholar] [CrossRef]
- Storani, F.; Di Pace, R.; Bruno, F.; Fiori, C. Analysis and Comparison of Traffic Flow Models: A New Hybrid Traffic Flow Model vs Benchmark Models. Eur. Transp. Res. Rev. 2021, 13, 58. [Google Scholar] [CrossRef]
- Li, Y.; Arora, N.; Osorio, C. On the Fundamental Diagram of Signal Controlled Urban Roads. In Proceedings of the 11th Triennial Symposium on Transportation Analysis conference (TRISTAN XI), Mauritius Island, Mauritius, 19–25 June 2022. [Google Scholar]
- Akcelik, R. Relating Flow, Density, Speed and Travel Time Models for Uninterrupted and Interrupted Traffic. Traffic Eng. Control 1996, 37, 511–516. [Google Scholar]
- Pueboobpaphan, R.; Nakatsuji, T.; Suzuki, H.; Kawamura, A. Transformation between Uninterrupted and Interrupted Speeds for Urban Road Applications. Transp. Res. Rec. J. Transp. Res. Board. 2005, 1934, 72–82. [Google Scholar] [CrossRef]
- Pueboobpaphan, R.; Yamamoto, F.; Nakatsuji, T.; Suzuki, H. Relationship between Uninterrupted and Interrupted Speed at Isolated Signalized Intersection. J. East. Asia Soc. Transp. Stud. 2005, 6, 2194–2209. [Google Scholar] [CrossRef]
- Barka, R.E.; Politis, I. Fitting Volume Delay Functions under Interrupted and Uninterrupted Flow Conditions at Greek Urban Roads. Eur. Transp. Trasp. Eur. 2001, 127, 13–20. [Google Scholar] [CrossRef]
- Meriem, B.; Stylianos, K.; Jeremy, T.; Zoi, C. Drones for Traffic Flow Analysis of Urban Roundabouts. Int. J. Traffic Transp. Eng. 2020, 9, 62–71. [Google Scholar]
- Salvo, G.; Caruso, L.; Scordo, A. Urban Traffic Analysis through an UAV. Procedia Soc. Behav. Sci. 2014, 111, 1083–1091. [Google Scholar] [CrossRef]
- Butilă, E.V.; Boboc, R.G. Urban Traffic Monitoring and Analysis Using Unmanned Aerial Vehicles (UAVs): A Systematic Literature Review. Remote Sens. 2022, 14, 620. [Google Scholar] [CrossRef]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. Unmanned Aerial Vehicle–Based Traffic Analysis: Methodological Framework for Automated Multivehicle Trajectory Extraction. Transp. Res. Rec. J. Transp. Res. Board. 2017, 2626, 25–33. [Google Scholar] [CrossRef]
- Salvo, G.; Caruso, L.; Scordo, A.; Guido, G.; Vitale, A. Traffic Data Acquirement by Unmanned Aerial Vehicle. Eur. J. Remote Sens. 2017, 50, 343–351. [Google Scholar] [CrossRef]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. UAV-Based Traffic Analysis: A Universal Guiding Framework Based on Literature Survey. Transp. Res. Procedia 2017, 22, 541–550. [Google Scholar] [CrossRef]
- Xue, C.; Jalayer, M.; Zhou, H. Validation of Traffic Simulation Model Output Using High-Resolution Video by Unmanned Aerial Vehicles. In Proceedings of the International Conference on Transportation and Development 2019, Alexandria, VA, USA, 9–12 June 2019; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 135–147. [Google Scholar]
- Yahia, C.N.; Scott, S.E.; Boyles, S.D.; Claudel, C.G. Unmanned Aerial Vehicle Path Planning for Traffic Estimation and Detection of Non-Recurrent Congestion. Transp. Lett. 2022, 14, 849–862. [Google Scholar] [CrossRef]
- Ahmed, A.; Ngoduy, D.; Adnan, M.; Baig, M.A.U. On the Fundamental Diagram and Driving Behavior Modeling of Heterogeneous Traffic Flow Using UAV-Based Data. Transp. Res. Part A Policy 2021, 148, 100–115. [Google Scholar] [CrossRef]
- Fosu, O.G.; Akweittey, E.; Opong, J.M.; Otoo, M.E. Vehicular Traffic Models for Speed-Density-Flow Relationship. J. Math. Model. 2020, 8, 241–255. [Google Scholar]
- Gaddam, H.K.; Rao, K.R. Speed–Density Functional Relationship for Heterogeneous Traffic Data: A Statistical and Theoretical Investigation. J. Mod. Transp. 2019, 27, 61–74. [Google Scholar] [CrossRef]
- Péter, T.; Fazekas, S. Determination of Vehicle Density of Inputs and Outputs and Model Validation for the Analysis of Network Traffic Processes. Period. Polytech. Transp. Eng. 2014, 42, 53–61. [Google Scholar] [CrossRef]
- del Castillo, J.M. Three New Models for the Flow–Density Relationship: Derivation and Testing for Freeway and Urban Data. Transportmetrica 2012, 8, 443–465. [Google Scholar] [CrossRef]
- Ni, D.; Leonard, J.D.; Jia, C.; Wang, J. Vehicle Longitudinal Control and Traffic Stream Modeling. Transp. Sci. 2016, 50, 1016–1031. [Google Scholar] [CrossRef]
- Cheng, Q.; Liu, Z.; Lin, Y.; Zhou, X.S. An S-Shaped Three-Parameter (S3) Traffic Stream Model with Consistent Car Following Relationship. Transp. Res. Part B Methodol. 2021, 153, 246–271. [Google Scholar] [CrossRef]
- Yakasai, H.M.; Shukor MY, A. Predictive Mathematical Modelling of the Total Number of COVID-19 Cases for The United States. Bioremediation Sci. Technol. Res. 2020, 8, 11–16. [Google Scholar] [CrossRef]
- Google. Google Maps. Available online: https://www.google.hr/maps (accessed on 20 June 2023).
- State Geodetic Administration Geoportal of the State Geodetic Administration of the Republic of Croatia. Available online: https://geoportal.dgu.hr/ (accessed on 20 June 2023).
- Croatian Roads Ltd. Geoportal of Croatian Public Roads. Available online: https://geoportal.hrvatske-ceste.hr/ (accessed on 20 June 2023).
- JetBrains PyCharm. 2023. Available online: https://www.jetbrains.com/pycharm/ (accessed on 30 August 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Fundamental “Speed–Density” Equation | Calibrated “Speed–Density” Equation | R-Squared |
|---|---|---|---|
| Greenshields (1935) [7] | 0.2690 | ||
| Greenberg (1959) [9] | 0.1563 | ||
| Underwood (1961) [10] | 0.3760 | ||
| Drake (1967) [13] | 0.3559 | ||
| Modified Morgan (1975) [64] | 0.3825 | ||
| Wang (3P) (2011) [23] | 0.3817 | ||
| Wang (5P) (2011) [23] | 0.3833 | ||
| Kucharski and Drabicki (2017) [4] | 0.3611 | ||
| Gaddam and Rao (5P) (2019) [58] | 0.3730 | ||
| Gaddam and Rao (6P) (2019) [58] | 0.3810 | ||
| Fosu et al. (2020) [58] | 0.3123 | ||
| Cheng et al. (2021) [63] | 0.2681 |
| Model | Regression Function for Continuous Traffic Stream Condition | R2 | Regression Function for Interrupted Traffic Stream Condition | R2 |
|---|---|---|---|---|
| Greenshields (1935) [7] | 0.29 | 0.09 | ||
| Greenberg (1959) [9] | 0.24 | 0.06 | ||
| Underwood (1961) [10] | 0.28 | 0.07 | ||
| Drake (1967) [13] | 0.28 | 0.09 | ||
| Modified Morgan (1975) [64] | 0.28 | 0.09 | ||
| Wang (3P) (2011) [23] | 0.29 | 0.09 | ||
| Wang (5P) (2011) [23] | 0.28 | 0.15 | ||
| Kucharski and Drabicki (2017) [4] | 0.28 | 0.08 | ||
| Gaddam and Rao (5P) (2019) [58] | 0.27 | 0.10 | ||
| Gaddam and Rao (6P) (2019) [58] | 0.28 | 0.11 | ||
| Fosu et al. (2020) [58] | 0.25 | 0.07 | ||
| Cheng et al. (2021) [63] | 0.28 | 0.09 |
| Continuous Traffic Stream Conditions | ||||
| Model | vmax [km/h] | vc [km/h] | gc [voz/km] | qmax [voz/h] |
| Greenshields (1935) [7] | 53.5 | 26.8 | 80.0 | 2141 |
| Greenberg (1959) [9] | ∞ | 18.7 | 59.0 | 1104 |
| Underwood (1961) [10] | 54.3 | 19.9 | 101.0 | 2009 |
| Drake (1967) [13] | 50.0 | 30.3 | 47.0 | 1422 |
| Modified Morgan (1975) [64] | 51.6 | 19.3 | 69.0 | 1331 |
| Wang (3P) (2011) [23] | 53.4 | 24.6 | 69.0 | 1699 |
| Wang (5P) (2011) [23] | 53.7 | 25.2 | 68.0 | 1714 |
| Kucharski and Drabicki (2017) [4] | 48.2 | 34.7 | 40.0 | 1388 |
| Gadam and Rao (5P) (2019) [58] | 52.7 | 26.9 | 58.0 | 1562 |
| Gadam and Rao (6P) (2019) [58] | 54.5 | 18.6 | 113.0 | 2099 |
| Fosu (2020) [58] | 82.6 | 24.3 | 96.0 | 2333 |
| Cheng (2021) [63] | 72.3 | 18.1 | 60.0 | 1084 |
| Interrupted Traffic Stream Conditions | ||||
| Model | vmax [km/h] | vc [km/h] | gc [voz/km] | qmax [voz/h] |
| Greenshields (1935) [7] | 34.4 | 17.2 | 80.0 | 1374 |
| Greenberg (1959) [9] | ∞ | 15.0 | 59.0 | 885 |
| Underwood (1961) [10] | 50.0 | 18.3 | 59.0 | 1078 |
| Drake (1967) [13] | 50.0 | 30.6 | 37.0 | 1132 |
| Modified Morgan (1975) [64] | 30.5 | 20.0 | 40.0 | 799 |
| Wang (3P) (2011) [23] | 33.5 | 17.0 | 81.0 | 1381 |
| Wang (5P) (2011) [23] | 34.0 | 16.9 | 84.0 | 1421 |
| Kucharski and Drabicki (2017) [4] | 30.0 | 21.6 | 59.0 | 1277 |
| Gadam and Rao (5P) (2019) [58] | 30.9 | 20.1 | 63.0 | 1268 |
| Gadam and Rao (6P) (2019) [58] | 35.0 | 12.7 | 129.0 | 1640 |
| Fosu (2020) [58] | 42.5 | 15.5 | 116.0 | 1793 |
| Cheng (2021) [63] | 49.6 | 12.4 | 83.0 | 1030 |
| Comparative Relative Differences [%] | ||||
| Model | vmax [km/h] | vc [km/h] | gc [voz/km] | qmax [voz/h] |
| Greenshields (1935) [7] | 35.8% | 35.8% | 0.0% | 35.8% |
| Greenberg (1959) [9] | - | 19.8% | 0.0% | 19.8% |
| Underwood (1961) [10] | 8.0% | 8.2% | 41.6% | 46.4% |
| Drake (1967) [13] | 0.0% | −1.1% | 21.3% | 20.4% |
| Modified Morgan (1975) [64] | 40.9% | −3.5% | 42.0% | 40.0% |
| Wang (3P) (2011) [23] | 37.3% | 30.8% | −17.4% | 18.7% |
| Wang (5P) (2011) [23] | 36.8% | 32.9% | −23.5% | 17.1% |
| Kucharski and Drabicki (2017) [4] | 37.7% | 37.7% | −47.5% | 8.0% |
| Gadam and Rao (5P) (2019) [58] | 41.3% | 25.2% | −8.6% | 18.8% |
| Gadam and Rao (6P) (2019) [58] | 35.7% | 31.5% | −14.2% | 21.9% |
| Fosu (2020) [58] | 33.1% | 33.7% | 0.9% | 34.2% |
| Cheng (2021) [63] | 31.3% | 31.3% | −38.3% | 5.0% |
| Traffic Flow Parameter | t-Statistic | Critical t-Value | 95% Confidence Interval | Hypothesis (H1) |
|---|---|---|---|---|
| Mean vehicle speed (V) | 34.6934 | 1.96 | [17.9685, 20.1221] | Accepted |
| Mean vehicle flow (q) | 5.04610 | 1.96 | [71.3028, 161.9837] | Accepted |
| Mean traffic density (g) | 26.6395 | 1.96 | [−20.6768, −17.8408] | Accepted |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jovanović, B.; Ševrović, M.; Luburić, G. Comparative Analysis of Deterministic Fundamental Diagrams Representative of Continuous and Interrupted Traffic Flow on Selected Regional Road in Croatia. Appl. Sci. 2024, 14, 533. https://doi.org/10.3390/app14020533
Jovanović B, Ševrović M, Luburić G. Comparative Analysis of Deterministic Fundamental Diagrams Representative of Continuous and Interrupted Traffic Flow on Selected Regional Road in Croatia. Applied Sciences. 2024; 14(2):533. https://doi.org/10.3390/app14020533
Chicago/Turabian StyleJovanović, Bojan, Marko Ševrović, and Grgo Luburić. 2024. "Comparative Analysis of Deterministic Fundamental Diagrams Representative of Continuous and Interrupted Traffic Flow on Selected Regional Road in Croatia" Applied Sciences 14, no. 2: 533. https://doi.org/10.3390/app14020533