



Channel Emulator Framework for Underwater Acoustic Communications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Integrate outputs of the mathematical model with wide sense stationary uncorrelated scattering (WSSUS) and SOS-based models for the synthetic generation of channel impulse responses, signal amplitudes, phase change profiles, Doppler frequencies, and the Doppler power spectral profile.
- Develop a Simulink-based channel emulator platform that incorporates the oscillator-based mathematical model and WSSUS-based channel sample generation.
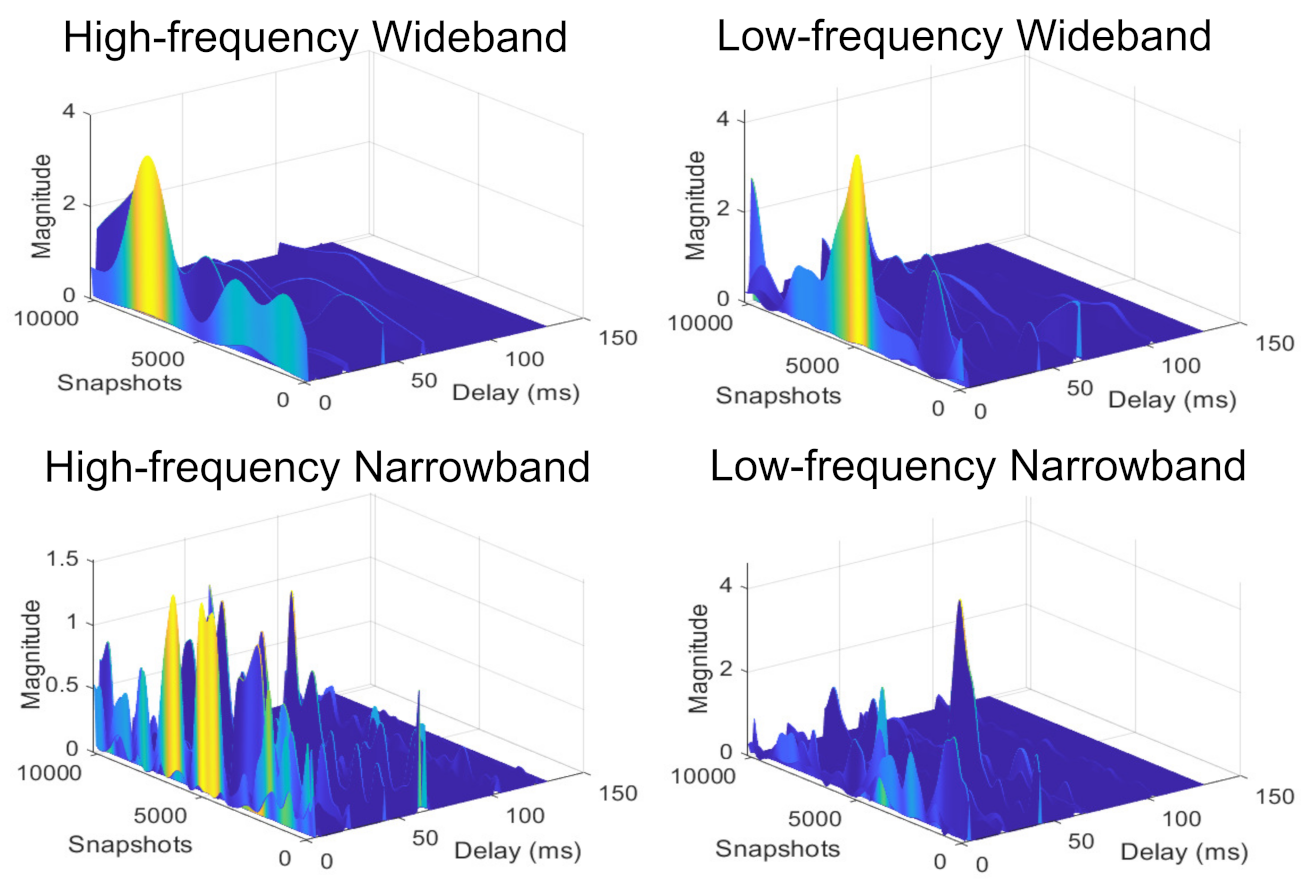
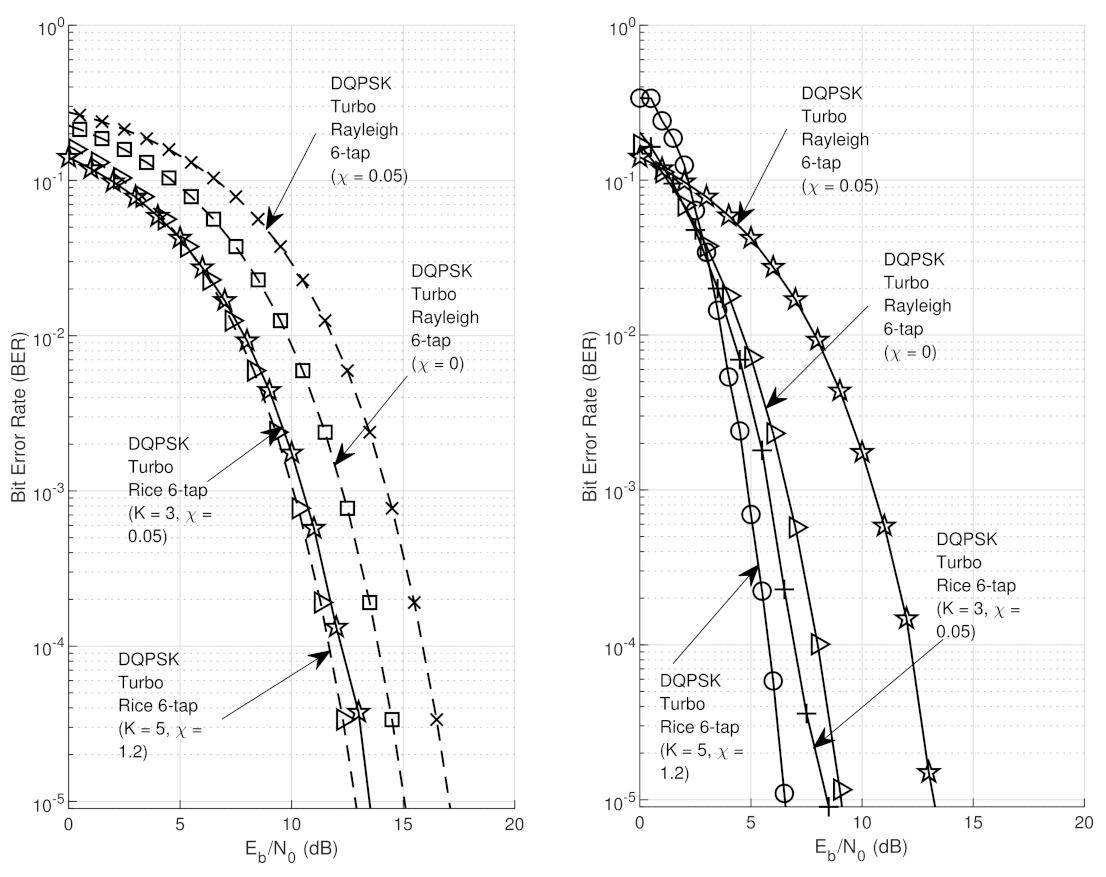
- Use the developed channel emulator platform, and demonstrate (i) snapshots of channel samples for different scenarios and parameters and (ii) the performance of two example communication systems—(a) the differential M-ary phase shift keying (DMPSK)-orthogonal frequency division multiplexing (OFDM) system with -rate Turbo coding for single-transmit–single-receive scenarios; (b) a DMPSK-OFDM system with a -rate Turbo coding for multiple-transmit–multiple-receive scenarios.
2. Mathematical Modelling of Propagating Signal
2.1. Modelling the Medium
2.2. Modelling the Acoustic Signal
2.3. Modelling the Interaction between the Medium and the Acoustic Signal
2.4. Numerical Results
3. Designing the UWAC Channel Emulator
Special Note on the Measurement Campaign
4. Results and Discussion
4.1. Simulation Results
4.2. Possible Example Use-Cases
4.2.1. Design of Probe Signal for Predicting System Performance
4.2.2. Simulating System Performance over a UWAC Link
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kai, C.; Weiwei, Z.; Lu, D. Research on Mobile Water Quality Monitoring System Based on Underwater Bionic Robot Fish Platform. In Proceedings of the 2020 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 25–27 August 2020; pp. 457–462. [Google Scholar]
- Flagg, R.; Otokiak, M.; Hoeberechts, M.; Marshall, L.M. Integrated Monitoring Systems for Coastal Communities. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–7. [Google Scholar]
- Gorsky, G.; Ohman, M.D.; Picheral, M.; Gasparini, S.; Stemmann, L.; Romagnan, J.-B.; Cawood, A.; Pesant, S.; García-Comas, C.; Prejger, F. Digital zooplankton image analysis using the ZooScan integrated system. J. Plankton Res. 2010, 32, 285–303. [Google Scholar] [CrossRef]
- Quijano, J.E.; Hannay, D.E.; Austin, M.E. Composite Underwater Noise Footprint of a Shallow Arctic Exploration Drilling Project. IEEE J. Ocean. Eng. 2019, 44, 1228–1239. [Google Scholar] [CrossRef]
- Monroy-Ríos, E.; Beddows, P.A. Hydrogeothermal convective circulation model for the formation of the Chicxulub Ring of Cenotes in the Yucatan Peninsula, Mexico. Geochem. Geophys. Geosyst. 2015, in press. [Google Scholar]
- Eskandari, N.; Bashir, M.; Truhachev, D.; Schlegel, C.; Bousquet, J.-F. Improving the quality of underwater acoustic channel via beamforming. In Proceedings of the 2018 OCEANS-MTS/IEEE, Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018. [Google Scholar]
- Kilfoyle, D.; Baggeroer, A.B. The State of the Art in Underwater Acoustic Telemetry. IEEE J. Ocean. Eng. 2000, 25, 4–27. [Google Scholar] [CrossRef]
- Stojanovic, M. On the Relationship Between Capacity and Distance in and Underwater Acoustic Communication Channel. In Proceedings of the First ACM International Workshop on Underwater Networks, Los Angeles, CA, USA, 25 September 2006. [Google Scholar]
- López-Fernández, J.; Fernández-Plazaola, U.; Paris, J.F.; Díez, L.; Martos-Naya, E. Wideband Ultrasonic Acoustic Underwater Channels: Measurements and Characterization. IEEE Trans. Veh. Technol. 2020, 69, 4019–4032. [Google Scholar] [CrossRef]
- Ghannadrezaii, H.; MacDonald, J.; Bousquet, J.-F.; Barclay, D. Channel Quality Prediction for Adaptive Underwater Acoustic Communication. In Proceedings of the 2021 Fifth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 31 August–2 September 2021; pp. 1–5. [Google Scholar]
- Clay, C.S.; Medwin, H. Acoustical Oceanography: Principles and Applications; John Wiley & Sons: New York, NY, USA, 1977; pp. 88, 98–99. [Google Scholar]
- Jensen, F.; Kuperman, W.; Porter, M.; Schmidt, H. Computational Ocean Acoustics; Springer: New York, NY, USA, 2000; pp. 11–12, 52–54. [Google Scholar]
- Porter, M. The BELLHOP Manual and User’s Guide: Preliminary Draft. 2011. Available online: http://oalib.hlsresearch.com/Rays/HLS-2010-1.pdf (accessed on 4 March 2023).
- Urick, R.J. Principles of Underwater Sound, 3rd ed.; Peninsula: Los Altos, CA, USA, 1996. [Google Scholar]
- Masiero, R.; Azad, S.; Favaro, F.; Petrani, M.; Toso, G.; Guerra, F.; Casari, P.; Zorzi, M. DESERT Underwater: An NS-miracle-based framework to design, simulate, emulate and realize test-beds for underwater network protocols. In Proceedings of the 2012 Oceans-Yeosu, Yeosu, Republic of Korea, 21–24 May 2012; pp. 1–10. [Google Scholar]
- Petrioli, C.; Petroccia, R.; Potter, J.R.; Spaccini, D. The SUNSET framework for simulation, emulation and at-sea testing of underwater wireless sensor networks. Ad Hoc Netw. 2015, 34, 224–238. [Google Scholar] [CrossRef]
- Guerra, F.; Casari, P.; Zorzi, M. World ocean simulation system (WOSS): A simulation tool for underwater networks with realistic propagation modeling. In Proceedings of the WUWNet ’09: 4th International Workshop on Underwater Networks, Berkeley, CA, USA, 3 November 2009; pp. 1–8. [Google Scholar]
- Jaeckel, S.; Raschkowski, L.; Burkhardt, F.; Thiele, L. Efficient Sum-of-Sinusoids-Based Spatial Consistency for the 3GPP New-Radio Channel Model. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar]
- Um, C.I.; Yeon, K.H.; Kahng, W.H. The quantum damped driven harmonic oscillator. J. Phys. A Math. Gen. 1987, 20, 611. [Google Scholar] [CrossRef]
- Milne, W.E. The numerical determination of characteristic numbers. Phys. Rev. 1930, 35, 863. [Google Scholar] [CrossRef]
- Bender, C.M.; Orzag, S.A. Mathematical Series: Advanced Mathematical Methods for Scientists and Engineers; McGraw-Hill: Singapore, 1978; Chapters 10–11; pp. 484–568. [Google Scholar]
- Hoeher, P. A statistical discrete-time model for the WSSUS multipath channel. IEEE Tran. Veh. Technol. 1992, 41, 461–468. [Google Scholar] [CrossRef]
- Ochi, H.; Watanabe, Y.; Shimura, T.; Hattori, T. Experimental results of short range wideband acoustic communication using QPSK and 8PSK. In Proceedings of the OCEANS 2008—MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008. [Google Scholar] [CrossRef]
- Yang, L.; Giannakis, G.B. Ultra-wideband communications—An idea whose time has come. IEEE Signal Process. Mag. 2004, 21, 26–54. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project—Technical Specification Group Radio Access Network: Multiplexing and Channel coding (FDD); 3GPP TS 25.212 v3.6.0. July 2001. Available online: https://www.3gpp.org/ftp/tsg_ran/TSG_RAN/TSGR_05/Docs/Pdfs/rp-99476.pdf (accessed on 4 March 2023).
- QPSK Demodulator Baseband, Demodulate QPSK-Modulated Data. Retrieved 9 June 2014. Available online: http://www.mathworks.com/help/comm/ref/qpskdemodulatorbaseband.html (accessed on 4 March 2023).










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dey, I.; Marchetti, N. Channel Emulator Framework for Underwater Acoustic Communications. Appl. Sci. 2023, 13, 5818. https://doi.org/10.3390/app13095818
Dey I, Marchetti N. Channel Emulator Framework for Underwater Acoustic Communications. Applied Sciences. 2023; 13(9):5818. https://doi.org/10.3390/app13095818
Chicago/Turabian StyleDey, Indrakshi, and Nicola Marchetti. 2023. "Channel Emulator Framework for Underwater Acoustic Communications" Applied Sciences 13, no. 9: 5818. https://doi.org/10.3390/app13095818