1. Introduction
The high-speed development of distributed collaborative techniques represented by multi-node joint detection, high dynamic networking, distributed cooperative control and intelligent decision making, has promoted the application of unmanned aerial vehicle (UAV) evolved from early single or small-scale to large-scale swarm, namely, UAV swarm system. A UAV swarm is the combination of not only the multiple UAV platforms, but also the discrete functionality of distributed notes. Multiple discrete UAVs are organized and coordinated in a distributed and collaborative operation with the goal of accomplishing the same task [
1]. With outstanding advantages of distributed multifunctional fusion, rapid dynamic reconfiguration, strong survivability and expansion, and high task effectiveness, UAV swarm systems has been extensively applied in various field [
2,
3,
4,
5,
6,
7,
8,
9,
10].
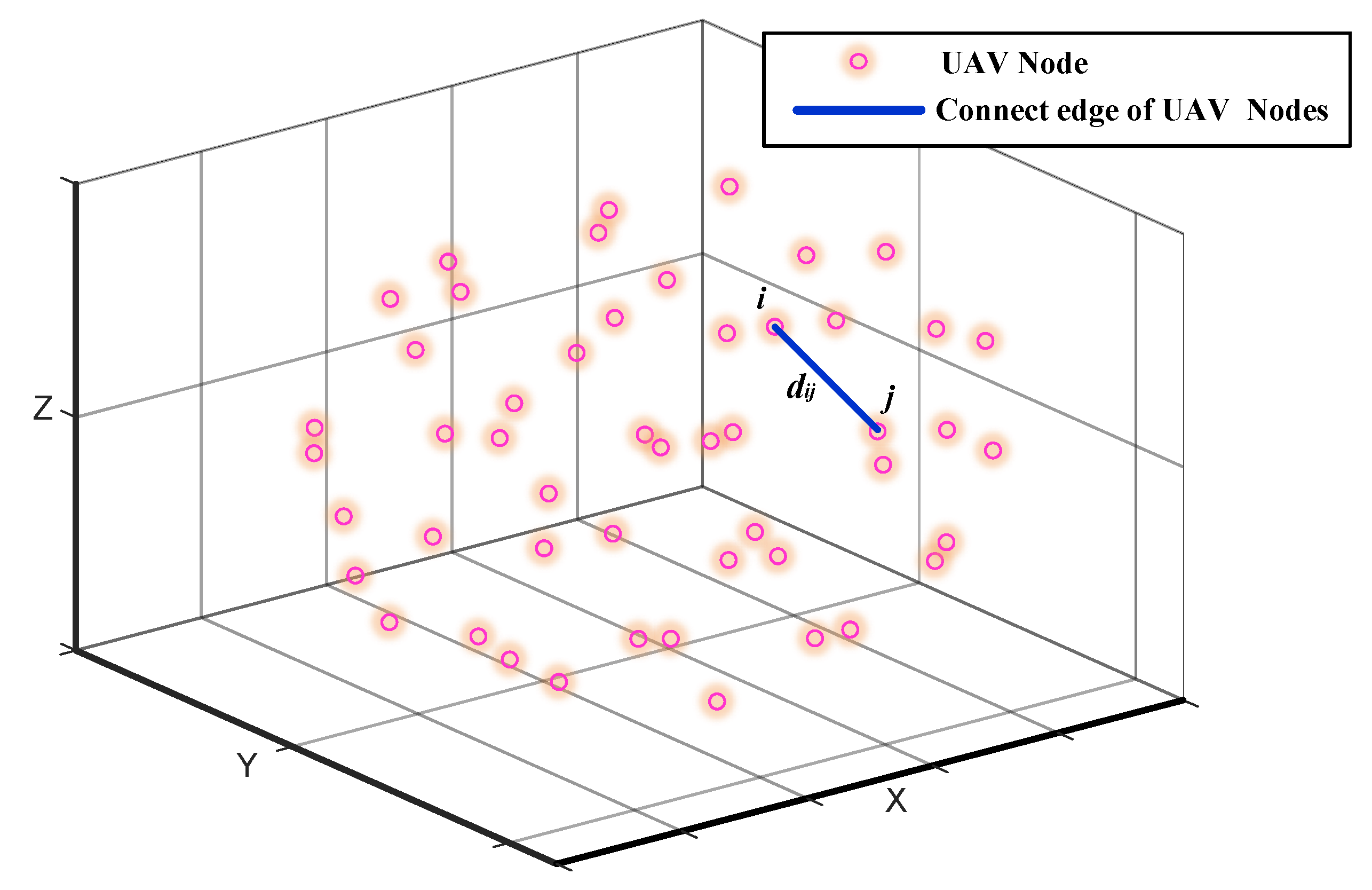
In the UAV swarm system, a large number of UAVs are interconnected to each other by establishing UAV-to-UAV wireless link, which integratedly forms a UAV swarm network. In fact, the swarm network is the foundation of collaboration between UAV nodes, and its performance directly affects the effectiveness of information interaction, joint computation, cooperative control and other aspects of the system [
11,
12,
13].
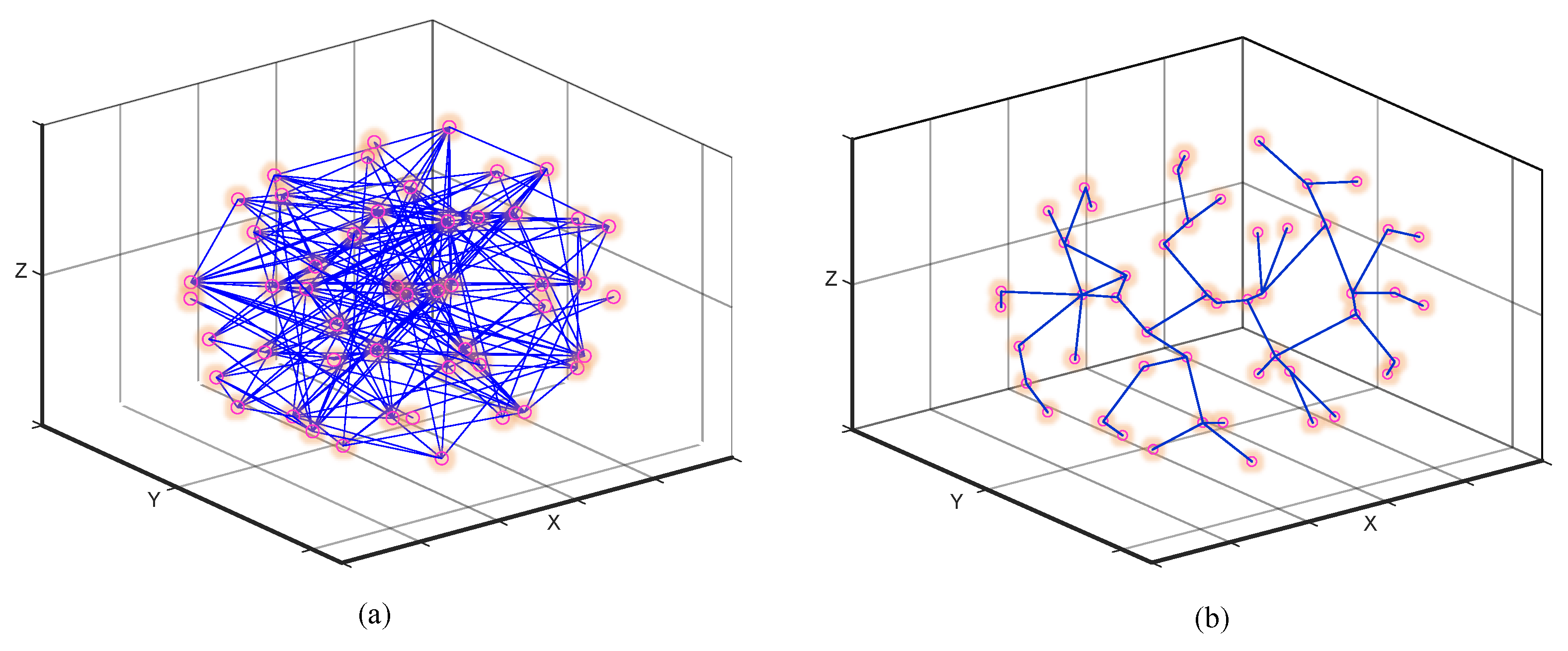
One of the most important designs for swarm network is the construction of network topology, which can be described as the connection state between UAV nodes constructed based on wireless links. Many researches on the construction methods of swarm network topology have been proposed. Generally, according to different construction criteria, we can classify the construction methods of network topology of swarm system into three categories: (i) under the criterion of topology construction speed [
14,
15,
16]: the first category is the methods aiming at topology construction speed, which mainly focuses on the low complexity and fast convergence of algorithms, but considers less about the system performance after construction; (ii) under the criterion of energy consumption [
17,
18,
19,
20,
21]: based on the consideration that UAV swarm is sensitive to energy consumption, the second category takes node energy consumption as the optimization target in the step of topology construction; (iii) under the criterion of network performance [
22,
23,
24]: the network topology is essentially constructed to serve the network interaction of UAV nodes, so the third category of methods perform the topology construction in terms of the network performance (network throughput, delay, etc.) under the constructed topology.
However, another important criterion, i.e., the stability of swarm network topology, has not been fully considered. Due to the variability of task objectives and its own dynamic attributes of a swarm system [
25], the relative position or motion relationships of UAV nodes change frequently, which results in dynamically changed swarm network topology [
24]. This will lead to high frequency maintenance or reconfiguration of network topology. While frequent maintenance or reconfiguration will increase the network overheads and energy consumption of swarm system, the interruption of network topology will cause a sharp decrease in the efficiency of collaborative tasks. Besides, an unstable network topology will generate isolated offline nodes, which will bring extra difficulty to the flight control of UAV swarm.
Therefore, a reliable swarm network topology has a vital influence on the performance of the swarm network and even the operation of whole swarm system. It is worth mentioning that the network topology stability is considered in reference [
17,
18,
19,
20,
21]. To be more precise, most of researches considered enhancing topology stability from the view of reducing the energy consumption of nodes (improving the node survival time). These literatures perform the construction of UAV network topology by employing clustering scheme, in which the topology stability is usually used as an evaluation index after the topology construction, rather than an optimization objective for the topology construction. In addition, the topology stability, network throughput, end-to-end delay and energy consumption have not been comprehensively considered in the process of topology construction.
In this paper, we focus on the method of network topology construction for UAV swarm based on the criterion of topology stability, while fully consider the system performance of UAV swarm. Generally, topology stability can be represented by topology duration, which refers to the time interval from the establishment of the topology to its reestablishment. On the other hand, clustering is an important method widely used in network topology construction, which has two critical steps, i.e, clustering and cluster head election. In this paper, clustering method is employed and an innovative design is made for the above steps by jointly considering the characteristics of the swarm system and the operation mechanism of the clustering network. The main innovations and contributions of this paper are as follows:
(1) A novel model of network topology construction for UAV swarm systems is proposed, in which the topology construction is formulated as a problem of maximizing the topology duration while satisfying the constraints of specific network throughput, end-to-end delay and nodes energy consumption of the system.
(2) A novel group trend similarity based double-head clustering method (GTSC) is proposed to solve the optimization problem. The proposed method takes full account of the current state and movement trends of the swarm system. In the process of clustering, based on the group mobility trend similarity of the swarm system, clusters are formed with nodes in close proximity and with similar mobility trend in order to maximize the topology duration. In the process of cluster head election, we take full account of mobility similarity, energy consumption strategies, and communication performance related factors including distance between nodes and inter-cluster hops.
(3) In the simulations, we employed algorithms with fast convergence speed Minimum Spanning Tree (MST) and K-means, representative swarm intelligence algorithm Particle Swarm Optimization (PSO) that is capable of achieving approximate optimal solution, a newest algorithm Improved Weighted and Location-based Clustering (IWLC) where factors of residual energy ratio, adaptive node degree, relative mobility and average distance are considered, and a state-of-the-art double cluster heads based algorithm DCM with load-balancing to perform the performance comparisons. The proposed GTSC method is more superior to the above algorithms in the performance of topology duration, network throughput, end-to-end delay and energy consumption balance.
The rest of the paper is organized as follows:
Section 2 discusses work related to topology construction methods for UAV swarms. In
Section 3, we model the UAV swarm system and formulate the problem of network topology construction. The proposed topology construction method GTSC is described in detail in
Section 4.
Section 5 gives simulation results and performance evaluations, and
Section 6 concludes the paper.
2. Related Works
According to various optimization objective, typical topology construction algorithms are shown in
Table 1.
Lowest ID method [
14] is a typical low-complexity algorithm that can be used to rapidly construct the swarm topology. In Lowest ID method, ID numbers are randomly assigned to all network nodes and several nodes with the lowest ID number are selected as the cluster head. The cluster members are ascribed to the nearest cluster according to the relative distance. However, the dynamic characteristics and the network performance after topology construction are not considered, which results in unsuitable for UAV swarm system with high dynamics and high network performance requirements.
K-means algorithm is also a low complexity method used in network topology construction. The algorithm consists of two main steps: firstly, network nodes are divided into K clusters by a determined K value; secondly, all nodes are ascribed into the nearest cluster. Reference [
15] uses K-means algorithm for fast construction of swarm network topology, and simulation results show that its construction speed is superior to the group intelligent algorithms such as Ant Colony Optimization (ACO) and Particle Swarm Optimization (PSO). Evidently, the choice of K value is a key step for the K-means algorithm. In [
16], a Mobile and Location-aware Stable Clustering (MLSC) algorithm is proposed, which employs the K-means algorithm for initial topology construction. The value of K is settled by the coverage probability of nodes, while the ascription of cluster member is determined by relative distance. In general, since the K-means algorithm requires a pre-set K value, the K-means algorithm has limitations for application in dynamic scenario.
As an important performance indicator of UAV swarm, the energy consumption is usually needs to be considered in the system design [
26,
27]. In the topology construction of UAV swarm, a common approach is adopted the energy consumption of UAV nodes as the optimization object. It is worth mentioning that reducing the energy consumption of certain nodes, such as cluster head nodes, also consequently leads to some performance gains of systems.
An Energy Aware Link-based Clustering (EALC) method is proposed for the topology construction of swarm system based on the optimization of node energy consumption [
17]. On the one hand, a reasonable transmit power is designed to reduce energy consumption of nodes according to the link conditions; on the other hand, the node residual energy combined with relative distance and nodes’ degree are considered in the step of cluster heads selection. Since the nodes with higher residual energy are adopted as the cluster heads, this method consequently improves the stability of the network. Simulation result has shown that the method has better performance on energy consumption and network stability in comparison with the Binary Particle Swarm Optimization (BPSO) and K-means-based schemes.
In [
18], the authors propose an energy-efficient Swarm Intelligent Clustering (SIC) algorithm. Firstly, it assigns the nodes with nearest neighbor distances into the same cluster to reduce the energy consumption of nodes during data transmission; then, the PSO algorithm is employed in the selection of cluster heads, in which the average distance and the residual energy of nodes are considered.
The Hybrid Gray Wolf Optimization (HGWO) algorithm is proposed in [
19]. In the step of clustering, the optimal number of cluster heads is designed to reduce the energy consumption during data transmission. In the step of cluster head selection, node residual energy, nodes’ degree, and relative distance are also jointly considered.
Reference [
21] proposes a Binary Whale Optimization (BWOA) algorithm to select optimal cluster heads by jointly considering node residual energy, intra-cluster node distance, inter-cluster node distance and the cluster size balance. The scheme of cluster size balance is used for achieving a balance number of cluster member for different clusters, which will consequently balance the energy consumption and data transmission for all cluster head nodes.
An energy-efficient Improved Weighted and Location-based Clustering (IWLC) algorithm is proposed in [
20], in which not only the node residual energy, nodes’ degree, relative distance, but also, the relative motion between nodes is considered in the step of cluster head selection. It will be more valuable to takes into account the mobility of swarm throughout the whole topology construction process.
Although the reduction of energy consumption would indirectly improve some specific network performance, many researchers have proposed topology construction algorithms that takes network performance as the optimization objective.
Reference [
22] adopts the intra-cluster communication delay as the criterion for the topology construction. The authors optimized the intra-cluster communication delay by restricting the cluster diameter and number of cluster members. Moreover, under the restriction of the cluster diameter and number of cluster members, a Coalition Game Theory (CGT) based method is employed to select the nodes with similar mobility as the members of cluster.
A Connected Dominating Set (CDS) based method has been proposed in [
23], where maximizing the network throughput is adopted as the optimization objective in the topology construction process. First of all, the authors find the global transmission power while guaranteeing bi-connectivity of the network. Secondly, the Minimum Spanning Tree (MST) is constructed by using the page rank algorithm (PRA). Finally, in order to maximize the network throughput, the nodes position is adjusted by employing the PSO algorithm.
In [
24], the authors proposed a novel clustering method with double cluster heads for the topology construction of swarm, in which the Political Optimizer (PO) algorithm is employed in the selection of double cluster heads. The PO-based method achieved a traffic balance with double cluster heads mechanism by splitting the network load between two cluster heads based on Shannon entropy function. Simulation results show that the load-balance mechanism can achieve desirable end to-end performance when associated with standard routing protocols.
4. The Proposed GTSC Method
The clustering based topology construction method is well suitable for the UAV swarm networking applications, especially in the large scale swarm scenarios where the number of nodes
N is large [
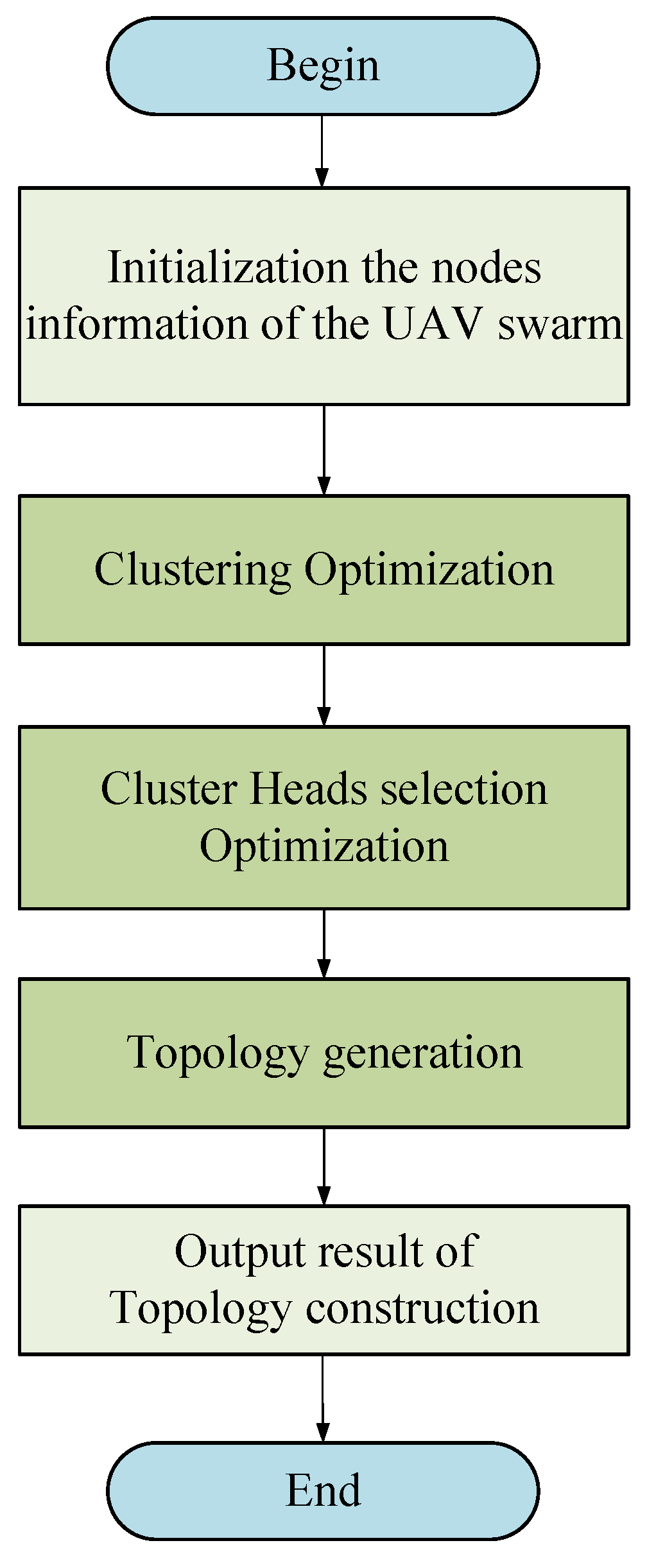
11]. In this paper, a clustering scheme is employed for solving the model in Equations (13)–(19). The construction process of swarm topology is divided into three steps, i.e., clustering, cluster heads selection and topology generation.The flowchart of the proposed GTSC method is presented in
Figure 3.
4.1. Optimal Clustering Algorithm
In order to maximum the topology duration of a UAV swarm network, both current status and dynamic trend of the swarm need to be considered. In the step of clustering, we need to simultaneously take the initial position and group similarity of movement trend into account. That is to say, the topology duration can be prolonged only when nodes with adjacent physical locations and similar mobility are assigned to the same cluster.
Here, we define a Similarity Map (SIMMAP) for evaluation of both instantaneous and dynamic relation between UAV nodes. Let
be the velocity difference between node
i and
j, respectively. Then we have
where
and
are the velocity vectors of node
i and
j, respectively.
Let
be the position similarity factor,
be the mobility similarity factor. Both similarity factors should satisfy following conditions: (i) when
and
,
and
; (ii) when
and
,
and
; (iii)
and
should be monotone decreasing functions of
and
, respectively. Choose the exponential function of
e to fit
and
, then
and
where
k and
are similarity sensitivity factors. The similarity of node
i and
j (combining instantaneous and dynamic relation) is then calculated by weighted summation of
and
as
where
and
are experience factors, and
. In fact, the similarity of any two nodes can be obtained based on this equation.
After the evaluation of similarity of swarm nodes, we employ Agglomerative Nesting (AGNES) algorithm to achieve UAV swarm clustering. AGNES algorithm is a down-top hierarchical clustering algorithm with low-complexity [
36,
37]. In UAV swarm scenario, the AGNES algorithm is performed under the following three steps: (i) treat each UAV node as an initial cluster; (ii) keep merging two clusters according to the SIMMAP, where the similarity among nodes is used as the evaluation value for merging clusters; (iii) terminate iteration when pre-defined condition is satisfied.
The Optimal Clustering Algorithm is presented in Algorithm 1.
| Algorithm 1 The Optimal Clustering Algorithm |
Input: , Output: Cluster set - 1:
for to N, N is the number of UAV nodes do - 2:
for to N, do - 3:
calculate - 4:
end for - 5:
end for - 6:
while (the number of nodes of any one clusters less than 5) do - 7:
if the cluster a has a minimum average distance value with cluster b then - 8:
merge cluster a and b into a same cluster - 9:
end if - 10:
end while - 11:
return
|
4.2. Optimal Cluster Head Selection Algorithm
In this paper, in order to obtain a good performance on the stability and energy balance, we employ a double cluster head scheme. In clustering based method, since the cluster head is the hub of data interaction between nodes of intra- and inter-cluster, it always plays an important role for enhancing the system performance. Here, we develop the optimal cluster head selection algorithm by jointly considering key factors that will affect the performance of the UAV swarm, which includes (i) intra-cluster distance : the average intra-cluster distance directly affects the overall energy consumption of the cluster; (ii) residual energy : the residual energy determines whether a node is capable of being as a high energy consuming node for a long time; (iii) inter-cluster distance : the average inter-cluster distance simultaneously has a influence on the energy consumption of cluster heads and the backbone network throughput; (iv) inter-cluster relative mobility : the trend approximation of inter-cluster relative mobility reflects the connection stability between cluster heads; (v) inter-cluster forwarding hops : the inter-cluster forwarding hops is the most critical factor affecting inter-cluster end-to-end data transmission delay.
In order to have a comprehensive consideration of above factors, we define the weighted function for the cluster head candidate nodes as
where
,
,
,
,
are weights, and
.
Furthermore, in consider of convergence speed, we divide the cluster head selection algorithm into two phases, i.e., rough selection and fine selection. In the phase of rough selection, we select several cluster head candidates within each cluster based on the intra-cluster distance factor
, which is calculated as
where
is the number of nodes in the cluster.
Then we select several nodes with minimum to form the cluster head candidates set in each cluster. Such rough selection ensures that the position of cluster head candidates is at the center of the cluster, which will shorten the distance between cluster head and cluster members.
In the phase of fine selection, the weighted function of the cluster head candidate nodes can be simplified as
Then we select two nodes with maximum value of as the final double cluster heads within each cluster. The factors of , , , are analyzed as follows.
In UAV swarm network, the cluster head is responsible for both data transmission among intra-cluster nodes and data forwarding between inter-cluster nodes. This results in the energy consumption of cluster heads being much greater than that of the cluster members. Therefore, the initial residual energy of nodes has to be considered in the cluster head selection process. The factor of residual energy of candidate nodes is normalized as
where
is the maximum energy capacity of the UAV node.
In phase of fine selection, we consider the average distance between cluster heads to satisfy the network throughput constraint. The inter-cluster distance factor is normalized as
where
is the total number of cluster head candidates in all clusters,
is the maximum euclidean distance between cluster heads.
The mobility relativity between inter-cluster heads can be calculated based on the velocity similarity
in Equation (22). The relative mobility factor is normalized as
As mentioned in
Section 3.2, we convert the performance constraint of end-to-end delay into the number of forwarding hops. The factor of inter-cluster forwarding hops can be normalized as
where
represents the number of forwarding hops between cluster head
i and
i,
denotes the maximum hops between cluster heads.
Based on the definition of above factors, the cluster head selection algorithm is presented in Algorithm 2.
| Algorithm 2 The Optimal Cluster Head Selection Algorithm |
Input: Cluster set Output: Cluster head set - 1:
for to K do - 2:
for each node do - 3:
calculate - 4:
end for - 5:
select n nodes as cluster head candidates - 6:
cluster head candidate set - 7:
end for - 8:
for to K do - 9:
for each cluster head candidates do - 10:
calculate - 11:
end for - 12:
select two nodes as double cluster heads - 13:
construct cluster head set - 14:
end for - 15:
return
|
4.3. Topology Generation
In this step, we need to generate the topology connection based on the previous steps. First of all, we should accomplish the topology connection for intra-cluster nodes. It can be seen that from the remaining energy ratio in Equation (11), we should consider the energy strategy from two aspects: (i) the residual energy, which has been considered in previous sections; (ii) the energy consumption of nodes. In consideration of energy balancing of cluster heads, we set an upper limit on the number of cluster members connected to single cluster head. The cluster head connection number upper limit is set as
where
∂ is the energy balancing parameter, and
is the number of nodes in the cluster.
Based on Equation (31), each cluster member is connected to the nearest cluster head according to the relative distance. For the connection of inter-cluster nodes, we establish a inter-cluster backbone topology which connect all of cluster heads under communication distance constraint, so as to ensure the stability of the swarm. The topology generation scheme is presented in Algorithm 3.
| Algorithm 3 The Topology Generation Scheme |
Input: Cluster set , cluster head set Output: Network topology - 1:
for to K do - 2:
for each node do - 3:
calculate the distance between node j and cluster heads separately - 4:
if the cluster heads satisfy then - 5:
select the closer cluster head to connect - 6:
else - 7:
select another cluster head to connect - 8:
end if - 9:
end for - 10:
end for connect all cluster heads that satisfy communication distance constraint - 11:
return network topology
|
5. Simulation Results
In the simulation, UAV swarm nodes are randomly deployed in 3D space whose size is positively correlated with the number of nodes. The mobility of nodes is initialized and updated according to the BOIDs model, which is widely used to describe the group mobility characteristics of the UAV swarm system [
7,
38,
39].
Simulation parameters are presented in
Table 2. To accurately evaluate performance, each simulation runs 1000 times. The number of UAVs is set from 32 to 512. The maximum communication range of UAV nodes is set to 80 m. The UAV node speed ranges from 20–30 m/s and the UAV node position update interval is 1s. Noting that, the distance scale in the simulation are relative and the exact size of the values does not affect the performance evaluation results. The experience parameter
,
in Equation (23) is set as 0.7, 0.3. The weighted parameters
,
,
,
in Equation (26) is set as 0.35, 0.15, 0.3, 0.2, respectively. The transmission packet size is set to 500–1000 bits. The packets are concurrently transmitted through randomly selected source and destination nodes, where the total number of packets is positively correlated with the number of nodes. The energy consumption of transmitting
l bits data package in the free-space model is calculated as
where
is the energy consumption of transmitting unit bit data,
is the energy consumption parameter of the power amplifier. In our simulations, we set
,
.
The energy consumption of receiving
l bits data package is:
Then the energy consumption for transmitting
l bits data package is as follows:
To evaluate and analyze the performance of the proposed GTSC method, the classic MST [
40,
41], K-means [
15], PSO-based [
42,
43] and the state of the art IWLC [
20], DCM [
24] topology construction methods are employed in the simulations for comparison. MST method is a representative topology construction method with fast convergence speed, while K-means is one of the most typical clustering methods for topology construction. On the other hand, PSO-based method is usually used for performance comparison due to its ability to intelligently find approximate optimal solution. The topology duration is also set as the optimization function of PSO method in our simulations. IWLC is a novel location-based K-means++ clustering algorithm where factors included residual energy ratio, adaptive node degree, relative mobility and average distance are considered in clustering process. DCM is a double cluster heads based topology construction method which utilizes the latest swarm intelligence algorithm, PO algorithm for clustering. Moreover, the load balancing of the cluster heads is also considered in the DCM method.
5.1. Effectiveness of Proposed Method
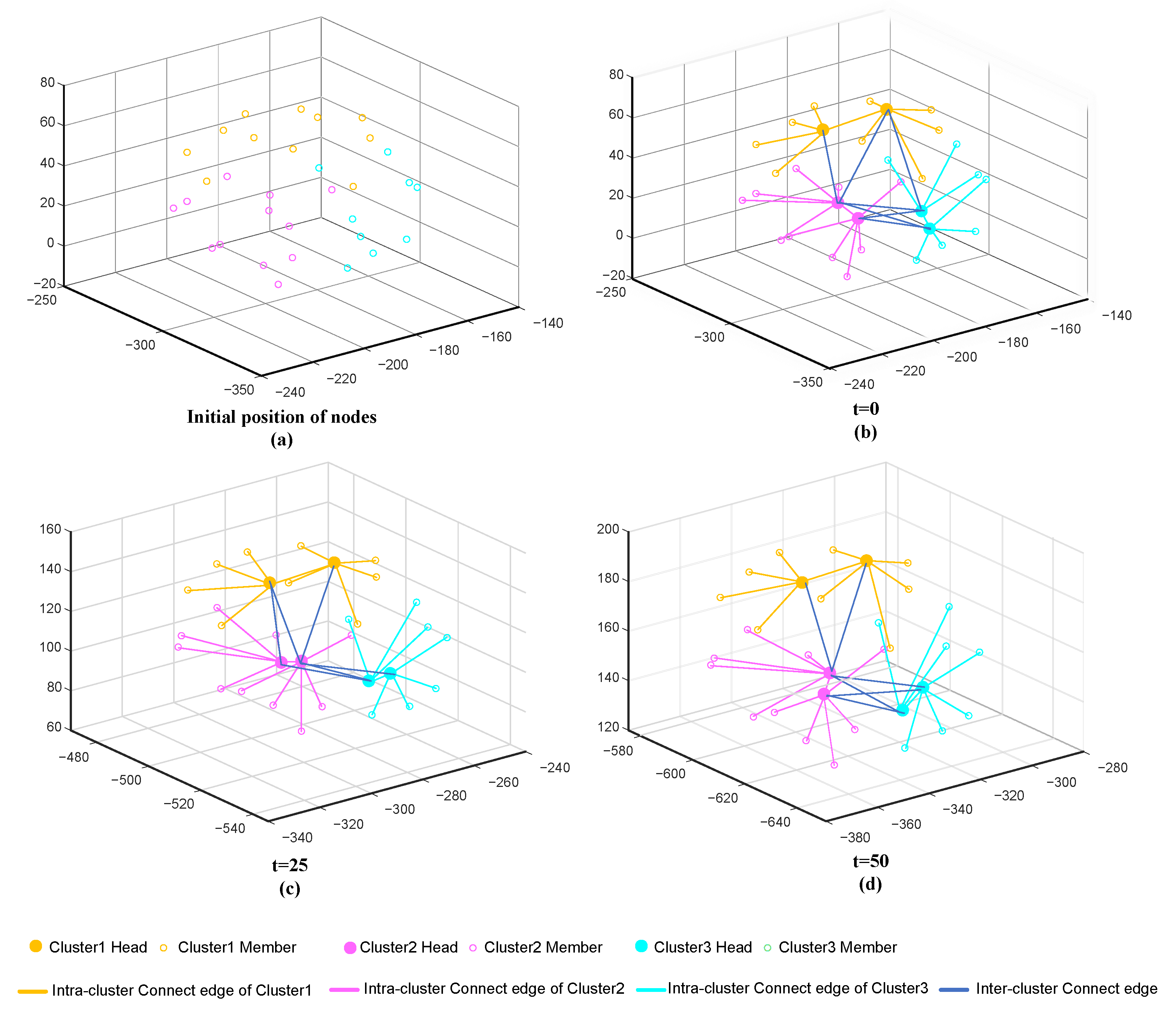
Figure 4 shows the swarm network topology constructed based on the novel group trend similarity based double-head clustering method with
.
Figure 4a is the initial nodes distribution in the 3D space. As shown in
Figure 4b, in the constructed topology, the UAV swarm is divided into three clusters and all nodes are connected through cluster heads.
Figure 4c,d is the network topology after a period of operation. It can be seen that when the position of swarm nodes constantly changing, the constructed topology is still able to ensure the connectivity of the network, which proves the effectiveness of the proposed method.
5.2. Topology Duration
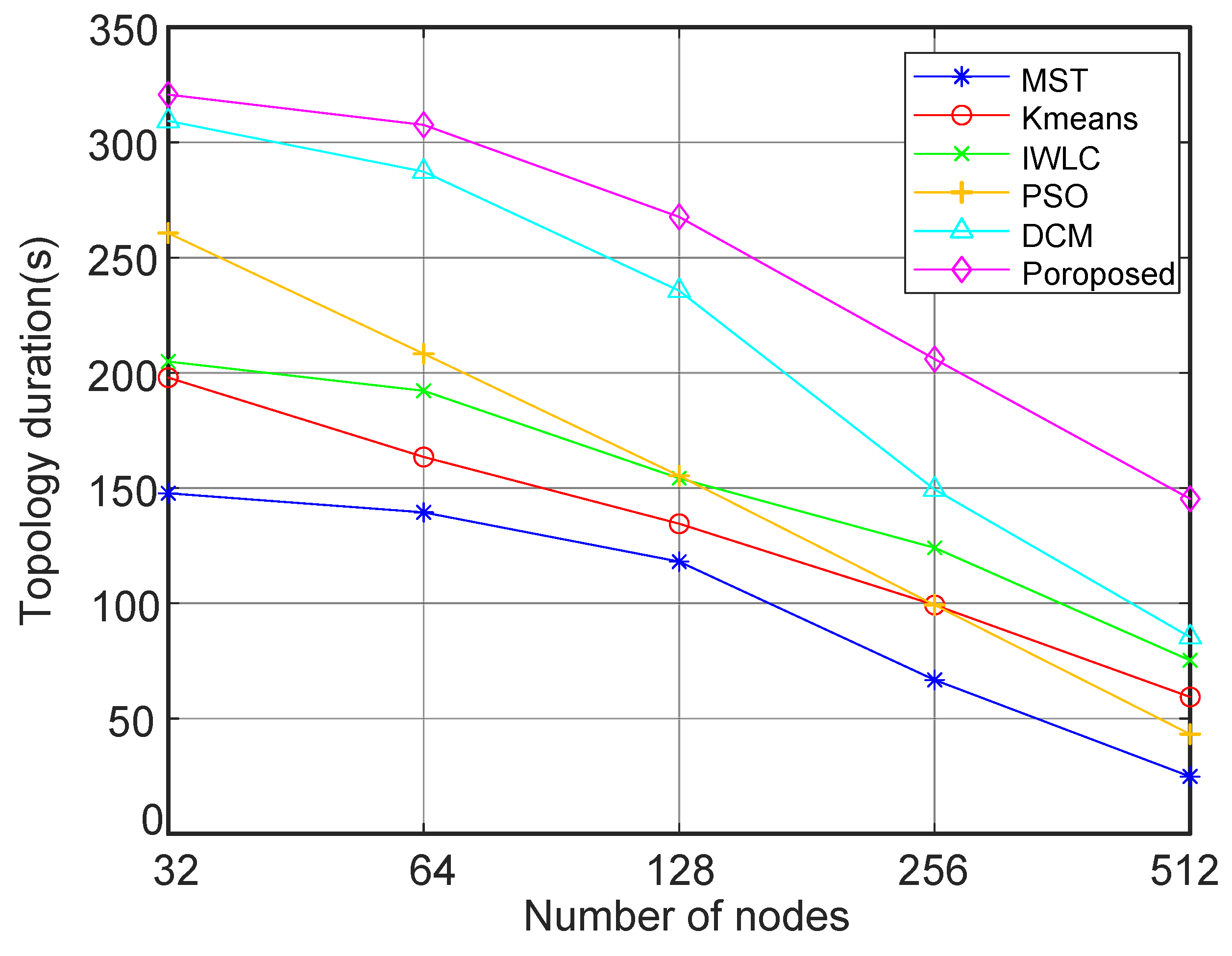
Figure 5 shows the results of topology duration of the network topology obtained by the proposed GTSC method, as well as the MST, K-means, PSO-based, IWLC and DCM methods. As shown, when the number of nodes increases, the topological duration of all methods decreases. It can also be seen obviously that our proposed topology construction method can always achieve better topology duration than any other methods. The topology duration of the proposed GTSC method is nearly twice as the other methods when the number of nodes reaches 512. This is mostly due to the joint consideration of the instantaneous and dynamic characteristics of swarm in our proposed method. The similarity map based clustering method makes the links less likely to disconnect as node position changes. Moreover, the double cluster heads scheme plays an important role in maintaining topological structure and balancing the energy consumption of the double cluster heads, which results in the DCM method has the closest performance to ours.
5.3. End-to-End Delay
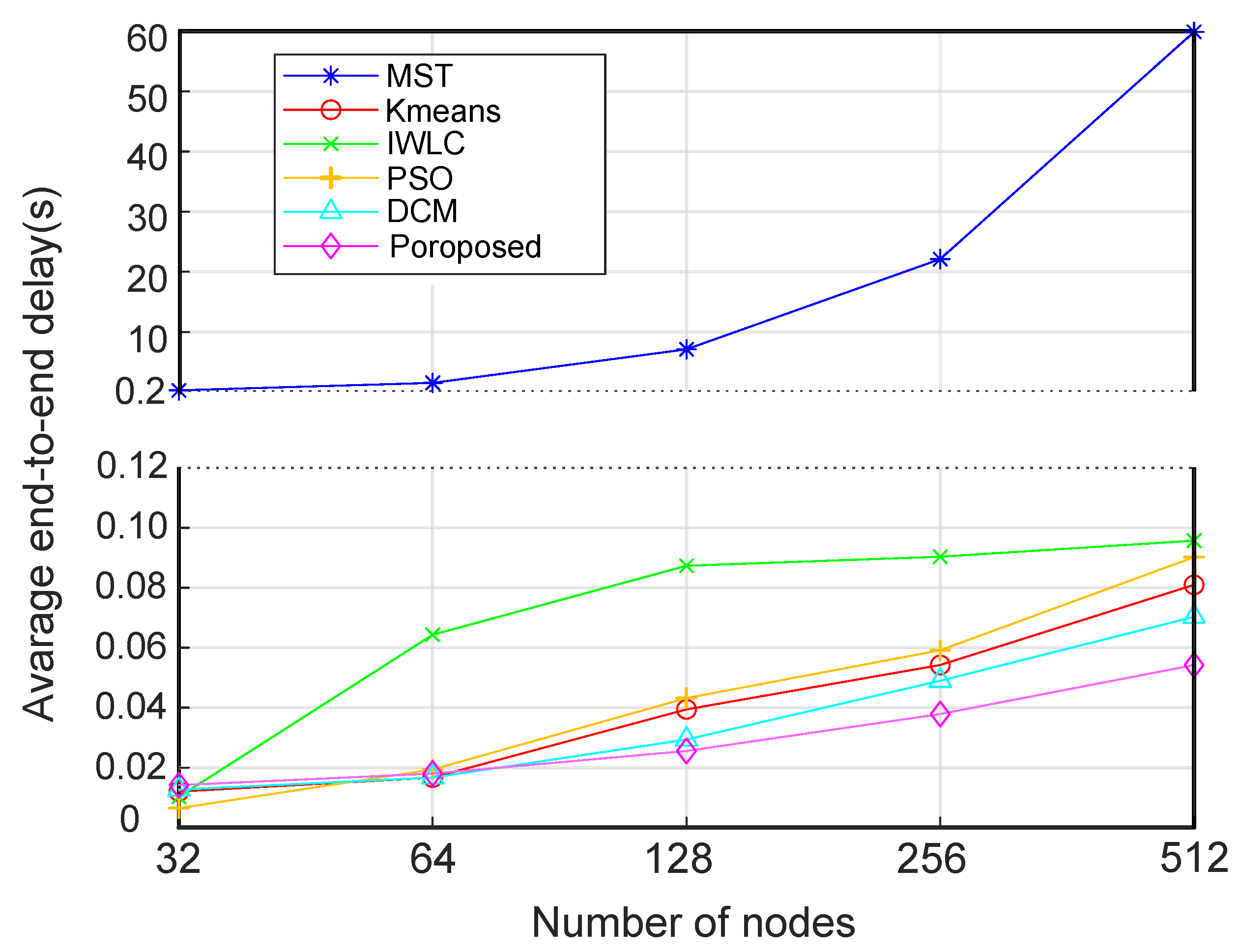
Figure 6 illustrates the comparison of average end-to-end delay when routing packets based on topology constructed by different methods. As the number of nodes increases, the end-to-end delay of the proposed GTSC method becomes increasingly better than that of the other methods. When the number of nodes reaches 512, the end-to-end delay of the proposed method is less than 0.06 s, while the K-means and PSO methods are over 0.08 s, and the DCM is nearly 0.07 s. It can be assumed that as the number of nodes continues increasing, the advantages of the proposed method in terms of end-to-end delay will become more apparent. When the number of nodes is less than 64, the end-to-end delay of MST, K-means, PSO-based, DCM and the proposed GTSC methods is close to the same. With small number of nodes, the benefits of the proposed GTSC method for optimizing the number of forwarding hops cannot be epitomized. As analyzed in the previous sections, the end-to-end delay in the swarm network is mainly determined by the number of forwarding hops, the MST method shows disadvantage, especially when the number of nodes increases. The end-to-end delay of the MST method is almost several hundred times higher than other methods when the number of nodes reaches 128 or more.
5.4. Total Throughput
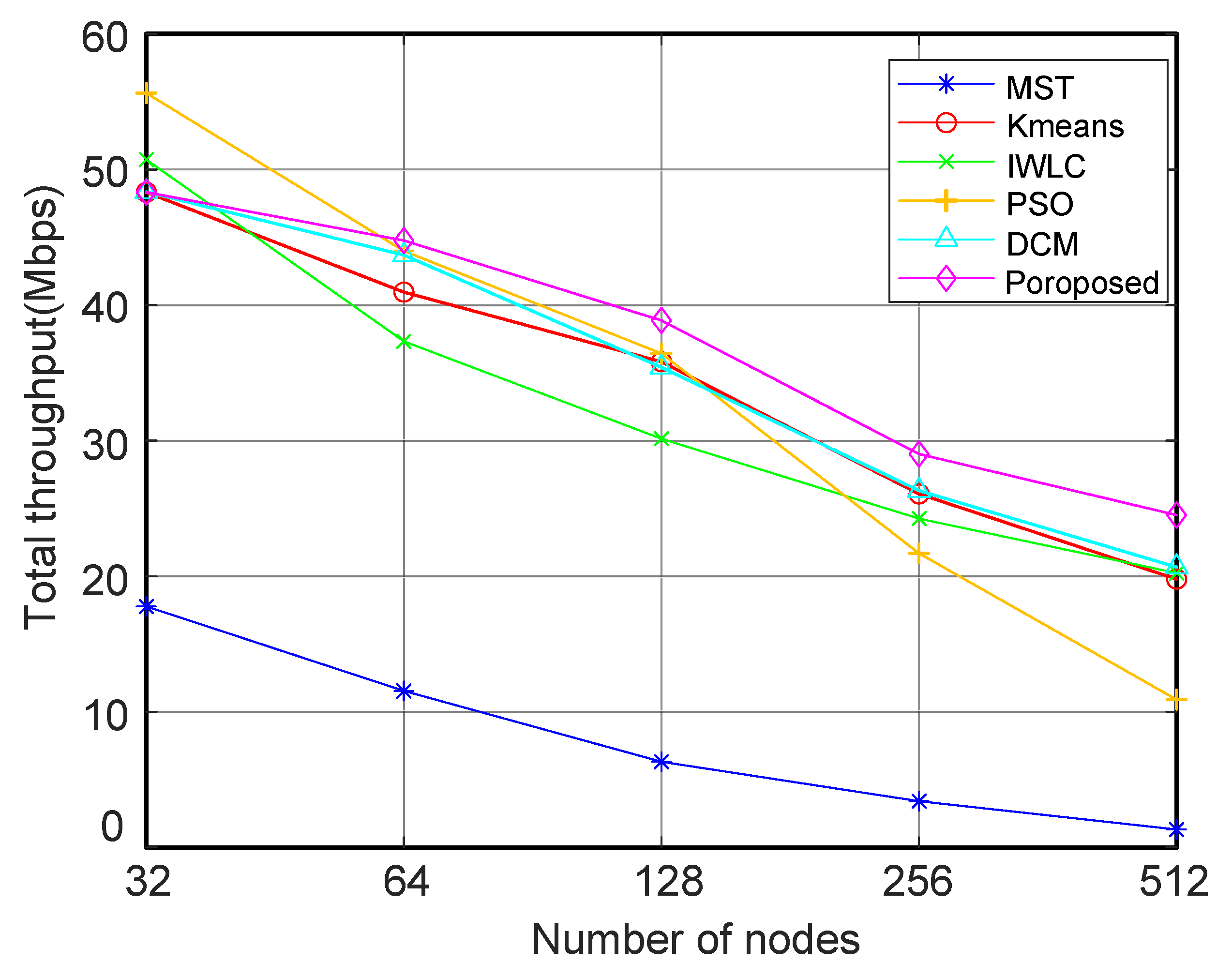
The total throughput of the network topology constructed by different methods under varies number of nodes is provided in
Figure 7. As mentioned in
Section 3.2, the throughput of network is mainly influenced by the number of forwarding hops and transmission distance theoretically. Simulation results as shown in
Figure 7 matches the analysis. When number of nodes reaches 128 or more, the proposed GTSC method can achieve higher total throughput than any other methods due to the consideration of both distance and number of forwarding hops, which shows the advantage of the proposed GTSC method. And it can be assumed that our proposed method will outperform any other methods when number of nodes continue increasing. When the swarm size is small, for example, when
N = 32, the PSO method has a better performance than the proposed method. This is due to the fact that the data transmission links constructed by PSO method does not require cluster heads to relay, which leads to lower forwarding hops. When the number of nodes increasing, network topology constructed by PSO method can no longer ensure low forwarding hops, and therefore results in reduced throughput performance.
5.5. Residual Energy Distribution
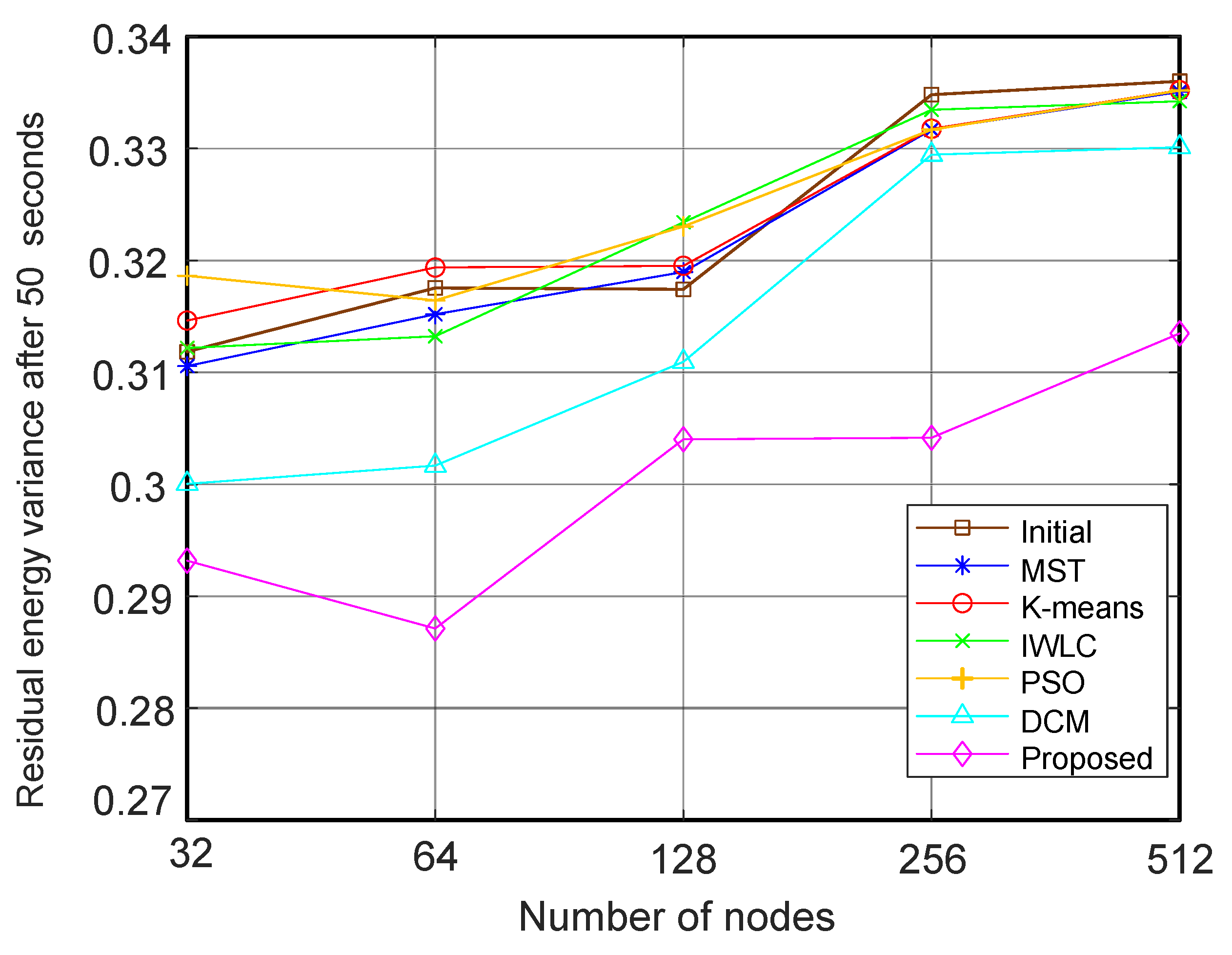
The energy balance of swarm network can be evaluated from the variance of residual energy of nodes. In this simulation, we compared the energy balance ability of swarm network constructed based on various methods from the view of the variance of residual energy of nodes. As shown in
Figure 8, the residual energy variance of the proposed GTSC method performs the best compared with other five methods. Regardless of the number of nodes, the proposed method can always achieve lower residual energy variance than the initial residual energy variance. Simulation results indicate that the energy consumption of the nodes is well balanced when the topology is constructed based on the proposed GTSC method. The well performance of the DCM method in terms of residual energy distribution can also demonstrate the advantage of the double cluster heads scheme.
5.6. Convergence Speed
As shown in
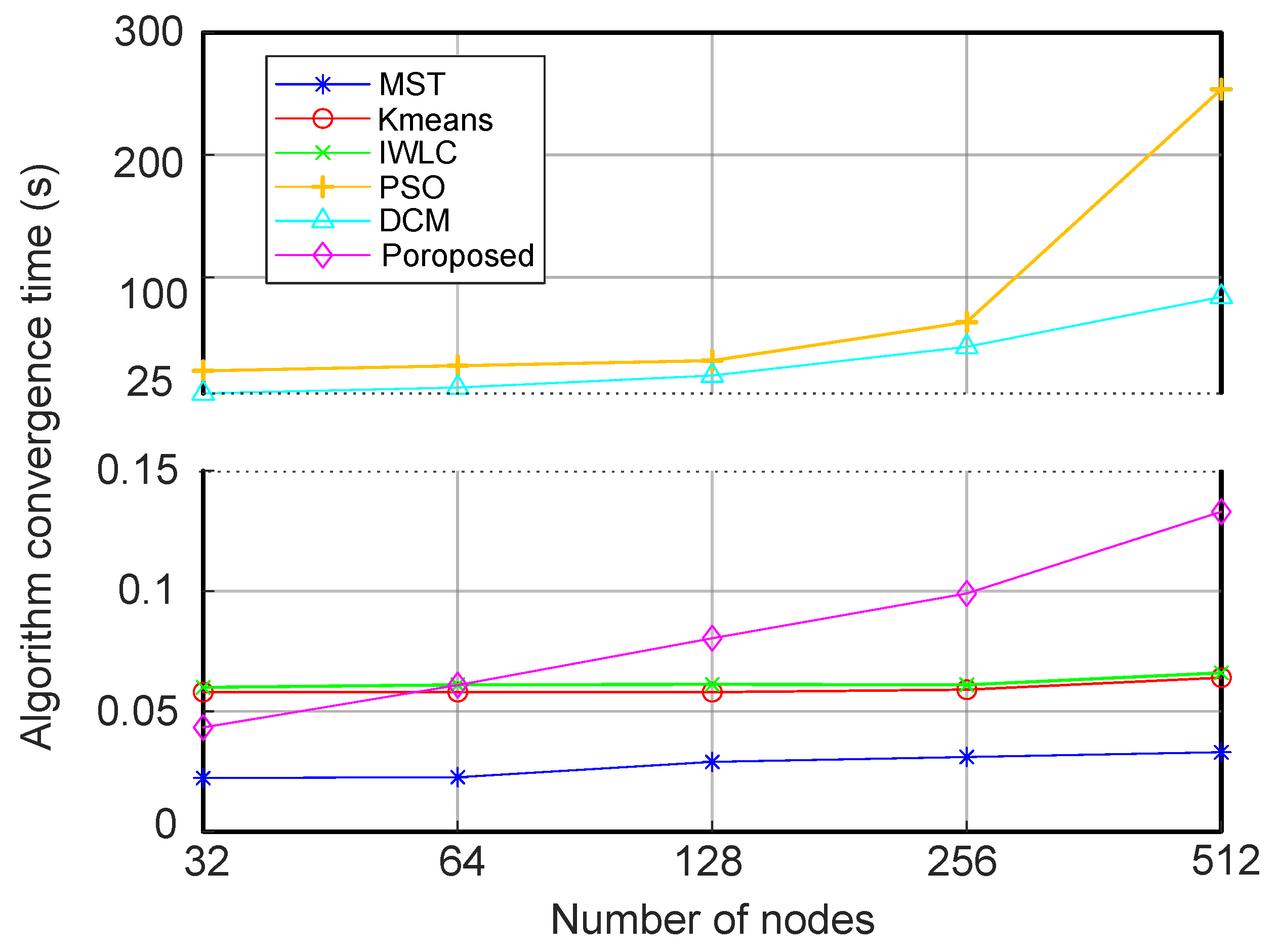
Figure 9, the increase of number of nodes leads to lower convergence speed, especially for PSO method and PO-based DCM method. When the number of nodes increases, the computational complexity of the PSO and DCM methods increases exponentially, such a convergence performance makes the PSO and DCM methods unrealistic in practical. MST and K-means methods are the most typical and widely used algorithms. The most important feature of MST and K-means methods is their fast convergence, which is confirmed by the simulation results, the convergence time barely varies with increasing nodes. As a result, the K-means++ based IWLC method also achieves good performance in terms of convergence speed. Meanwhile, the simulation results show that the convergence time of the proposed GTSC method continues increasing with the number of nodes but still within acceptable range. The proposed topology construction method will not cause excessive computational complexity and is of practical interest.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}