
U-Net with Asymmetric Convolution Blocks for Road Traffic Noise Attenuation in Seismic Data

Abstract
:1. Introduction
2. Data Preparation
2.1. Data Set
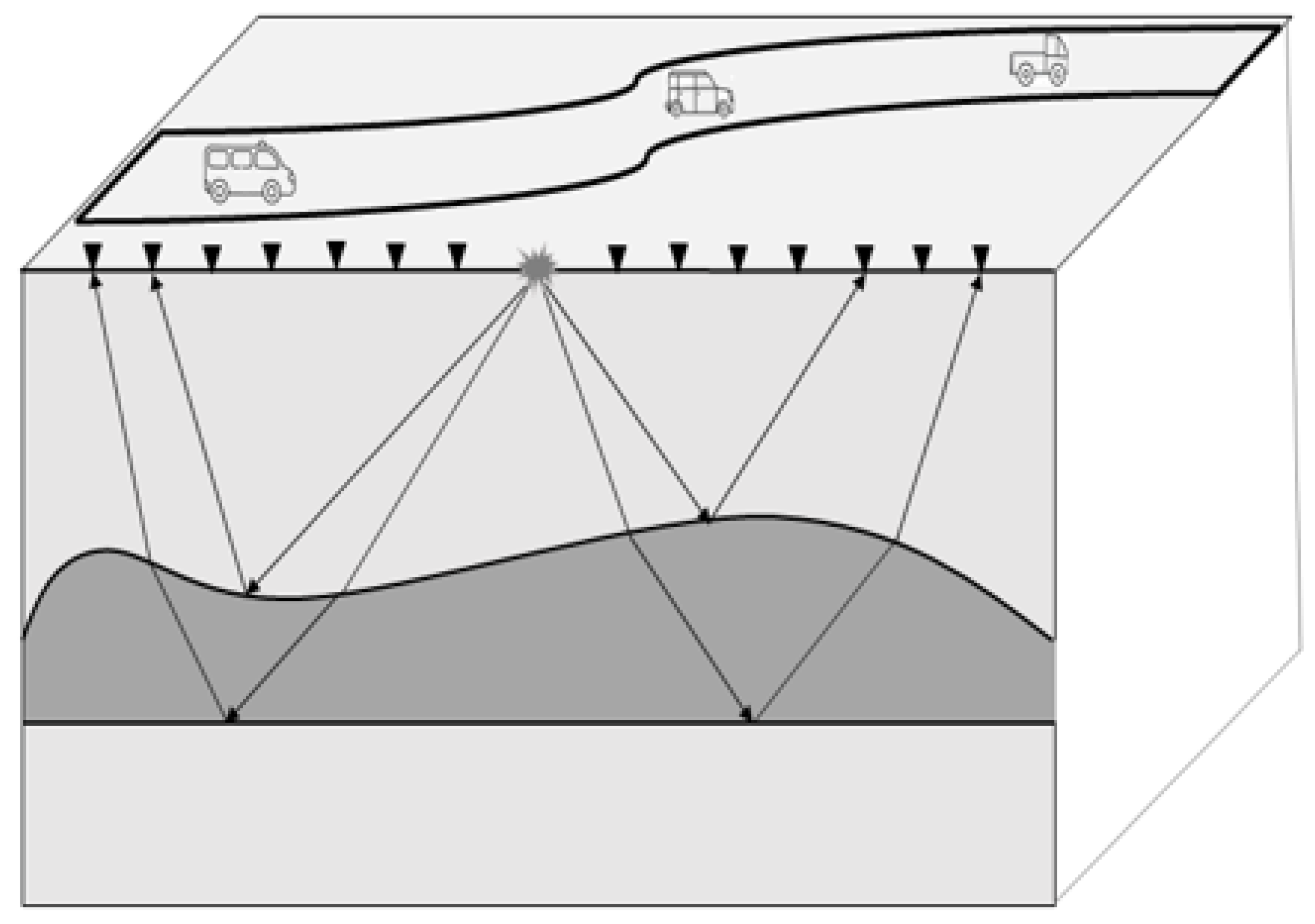
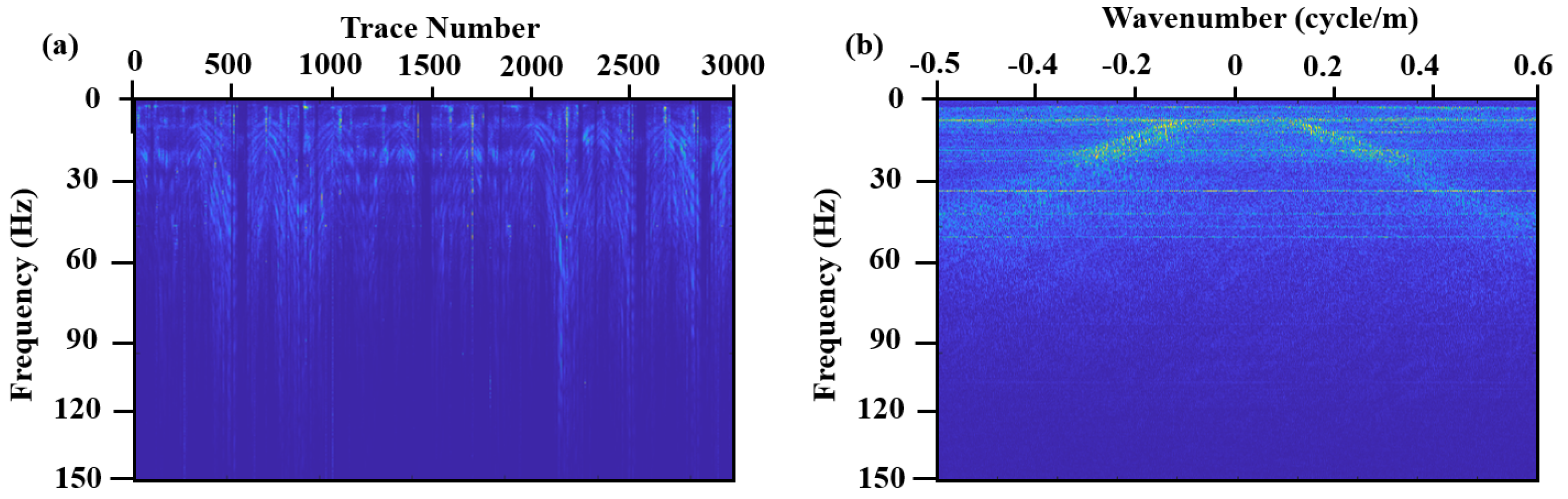
2.2. Road Traffic Noises
2.3. Training Data and Parameter
3. Methods
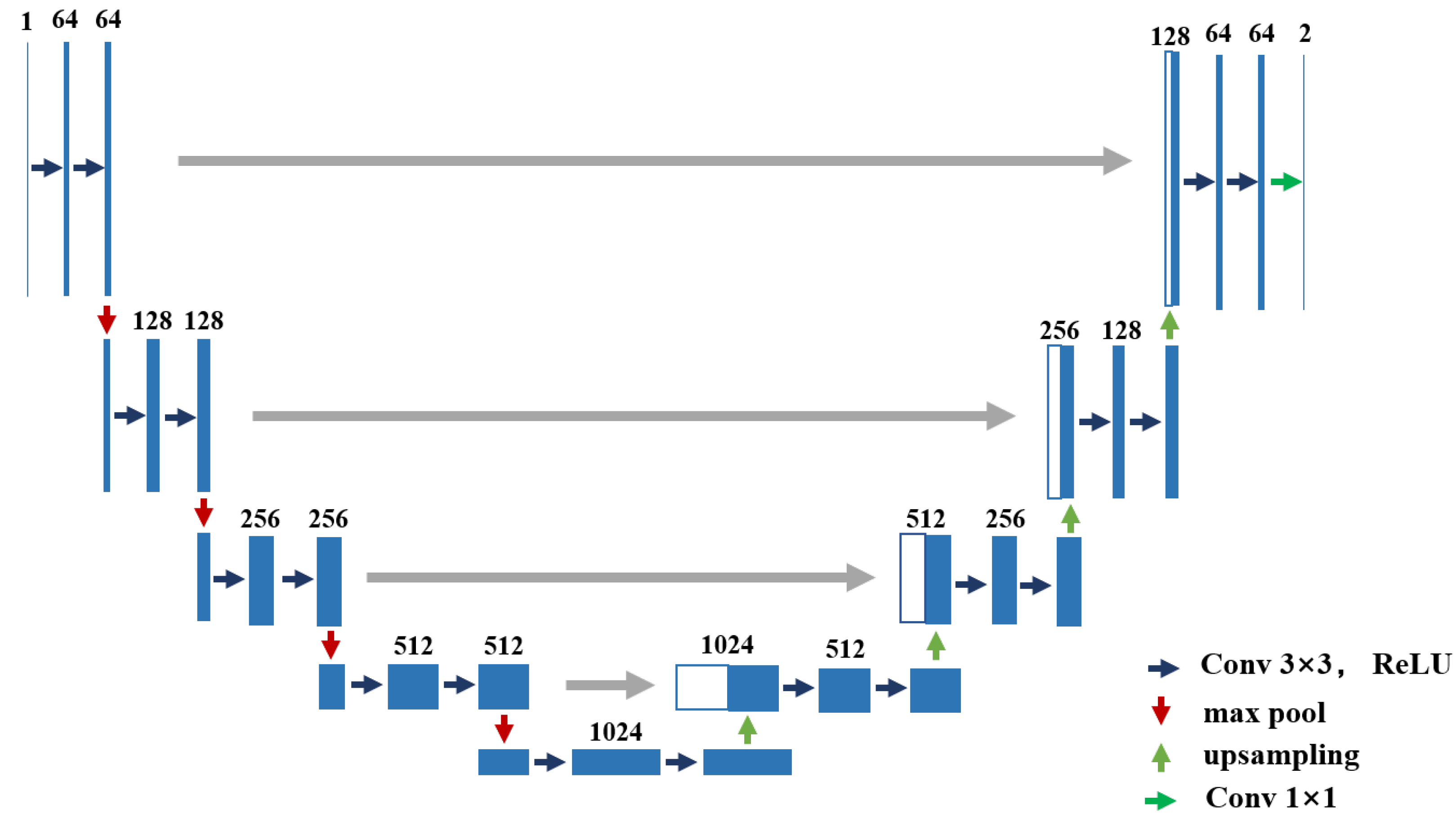
3.1. UNet Structures
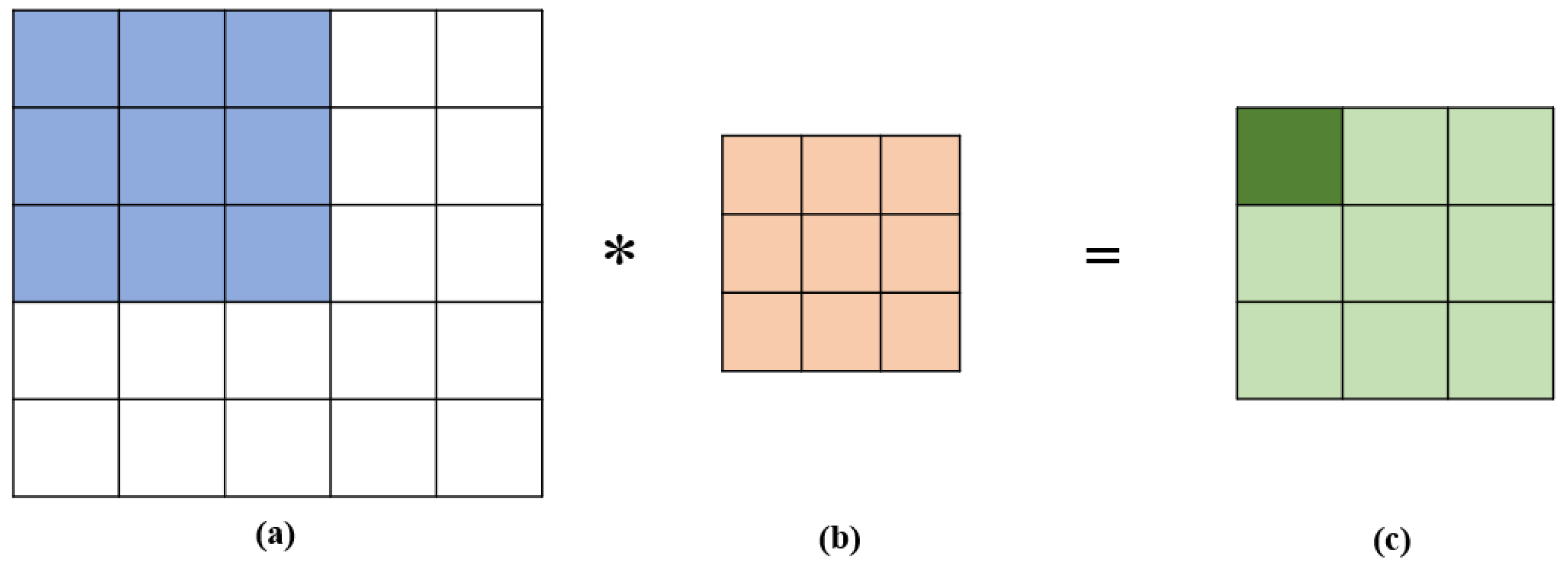
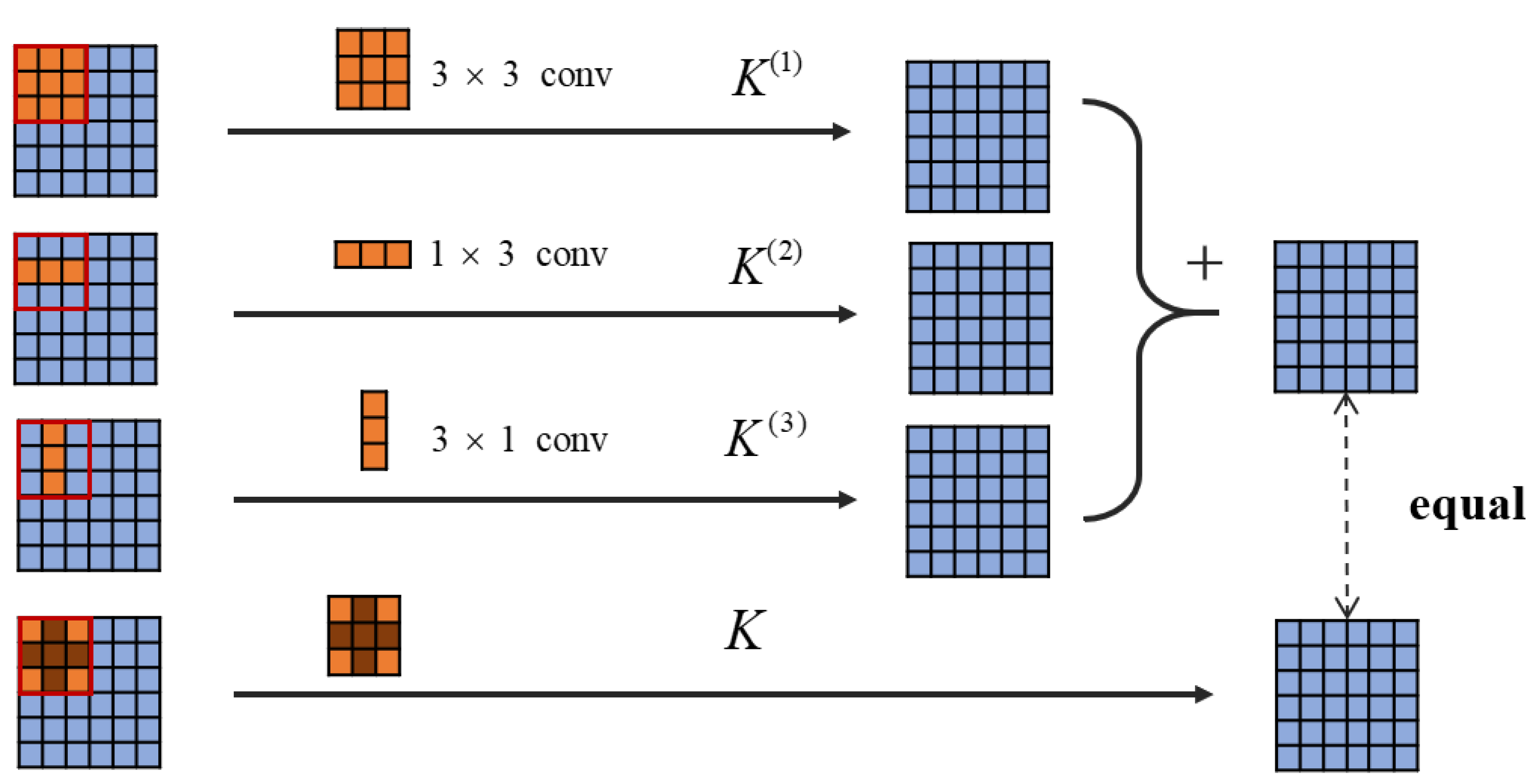
3.2. Asymmetric Convolution Blocks
4. Numerical Results
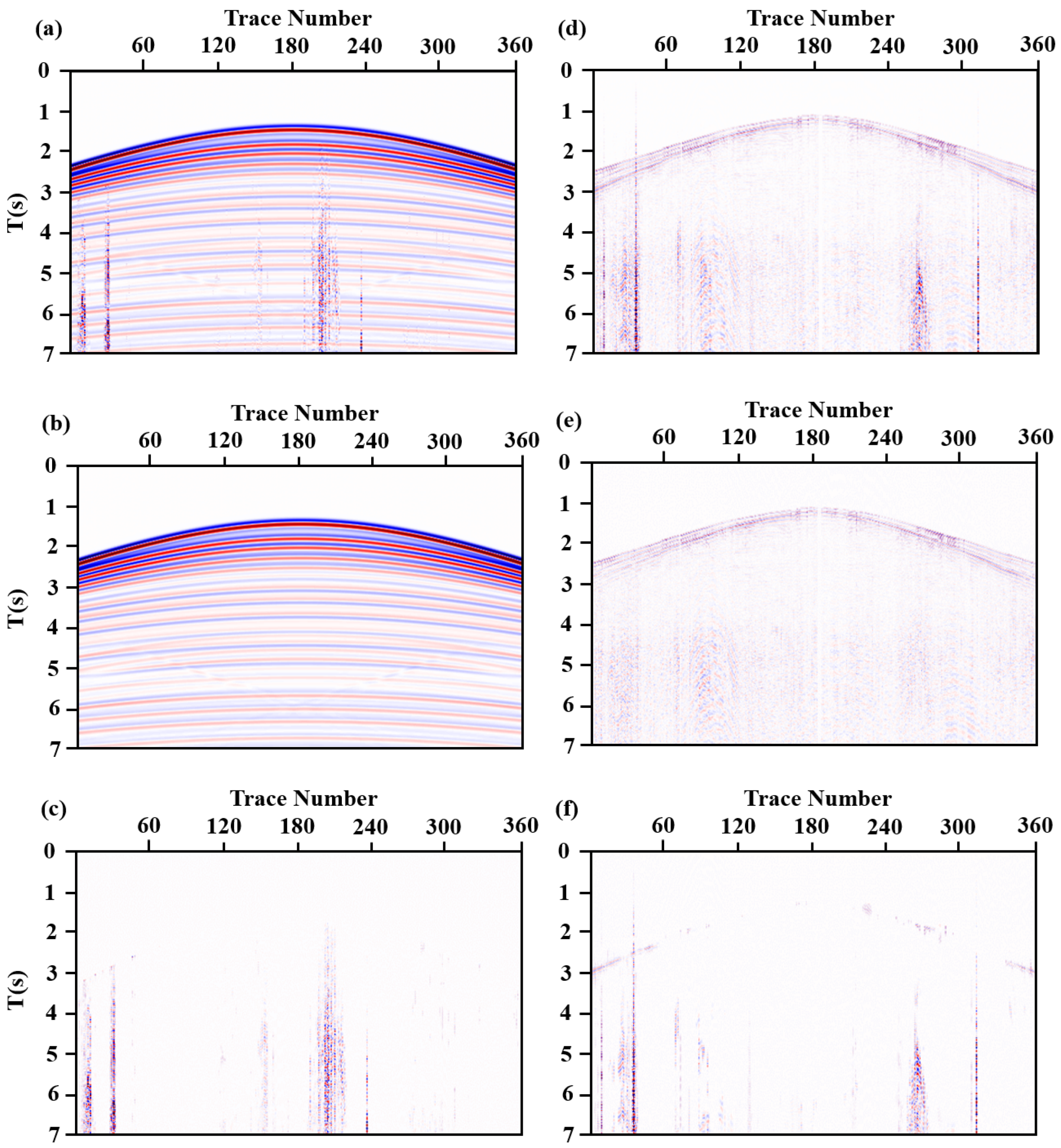
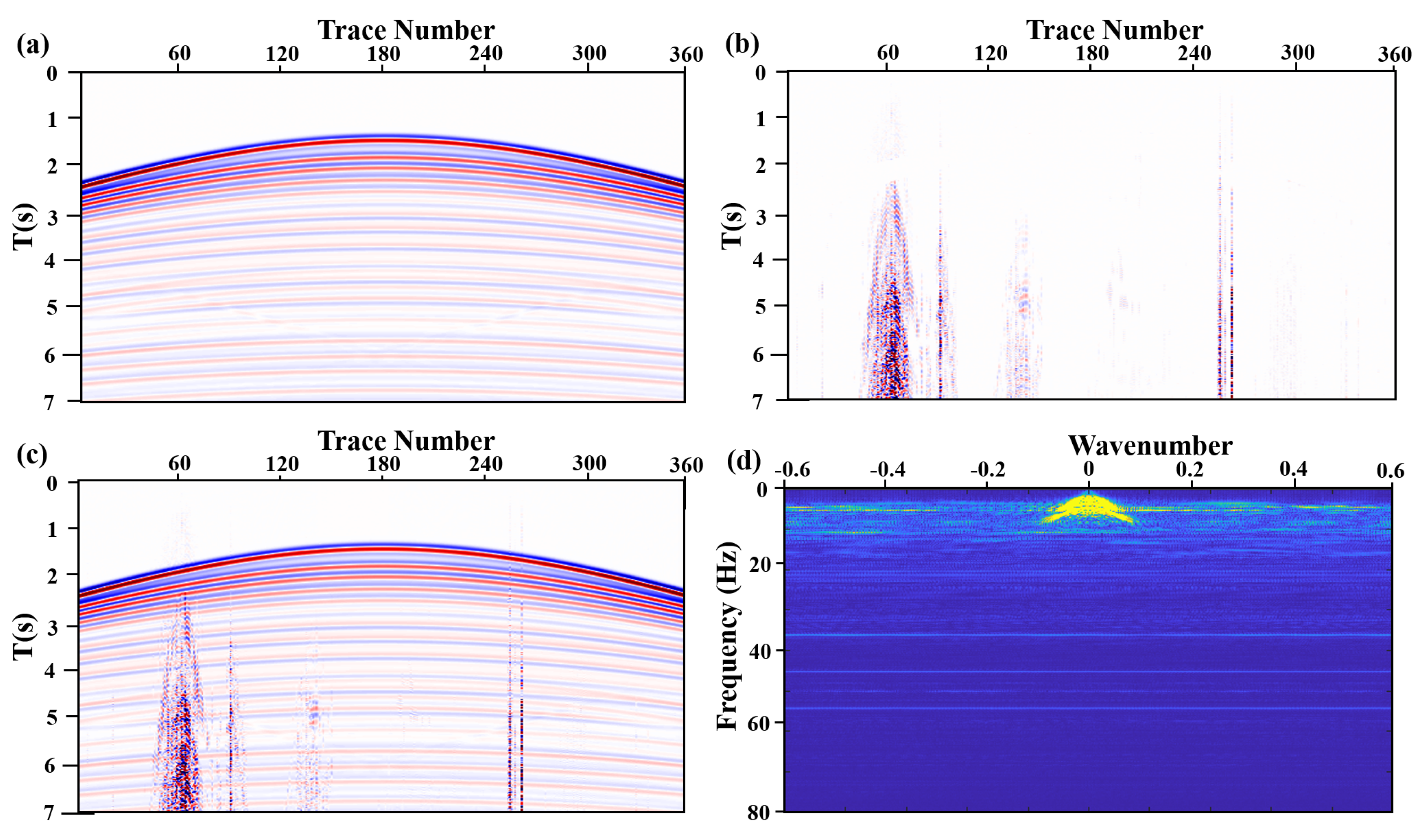
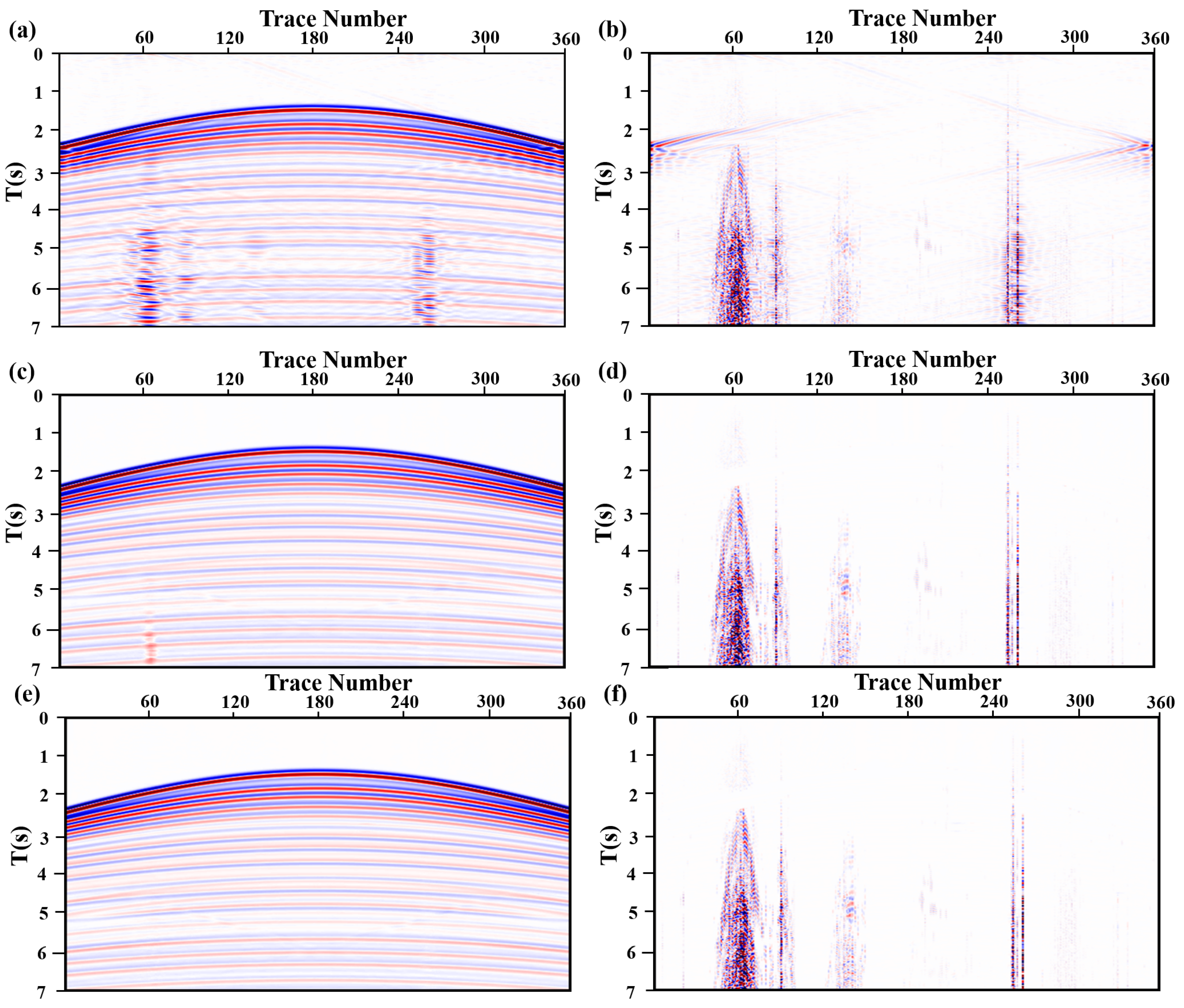
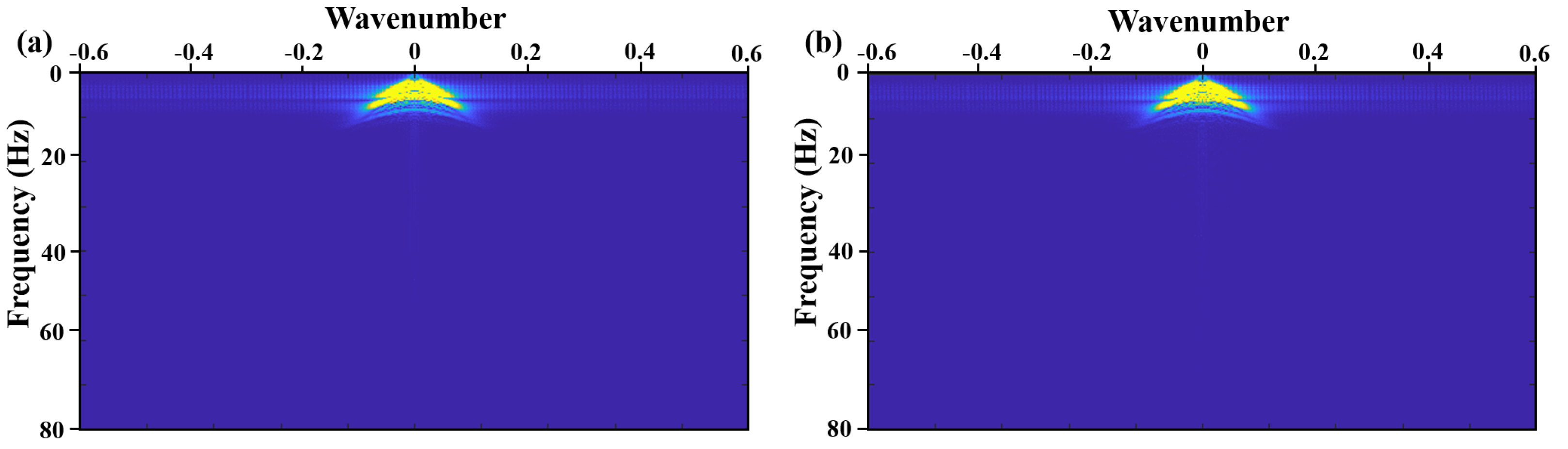
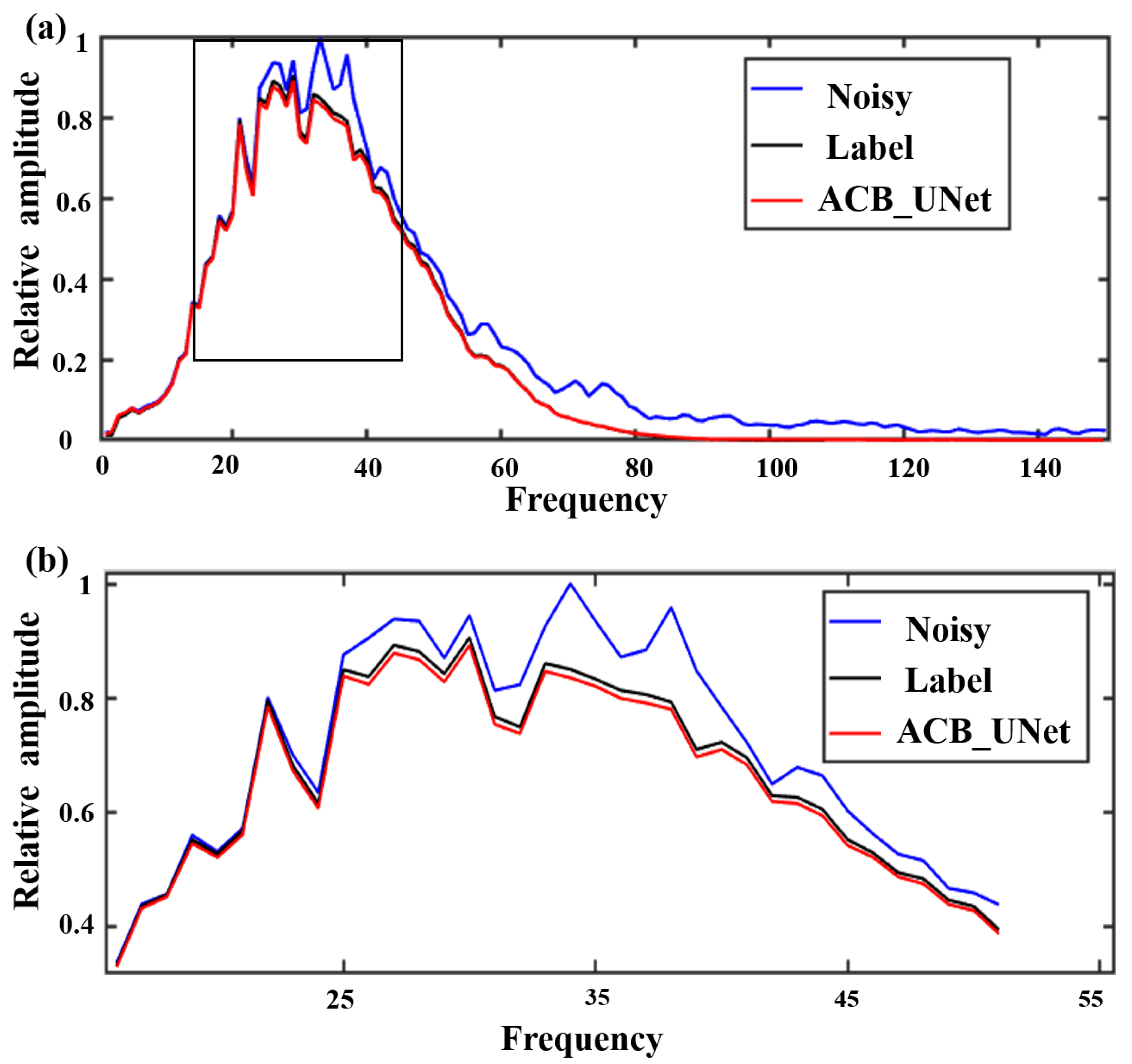
4.1. Synthetic Data
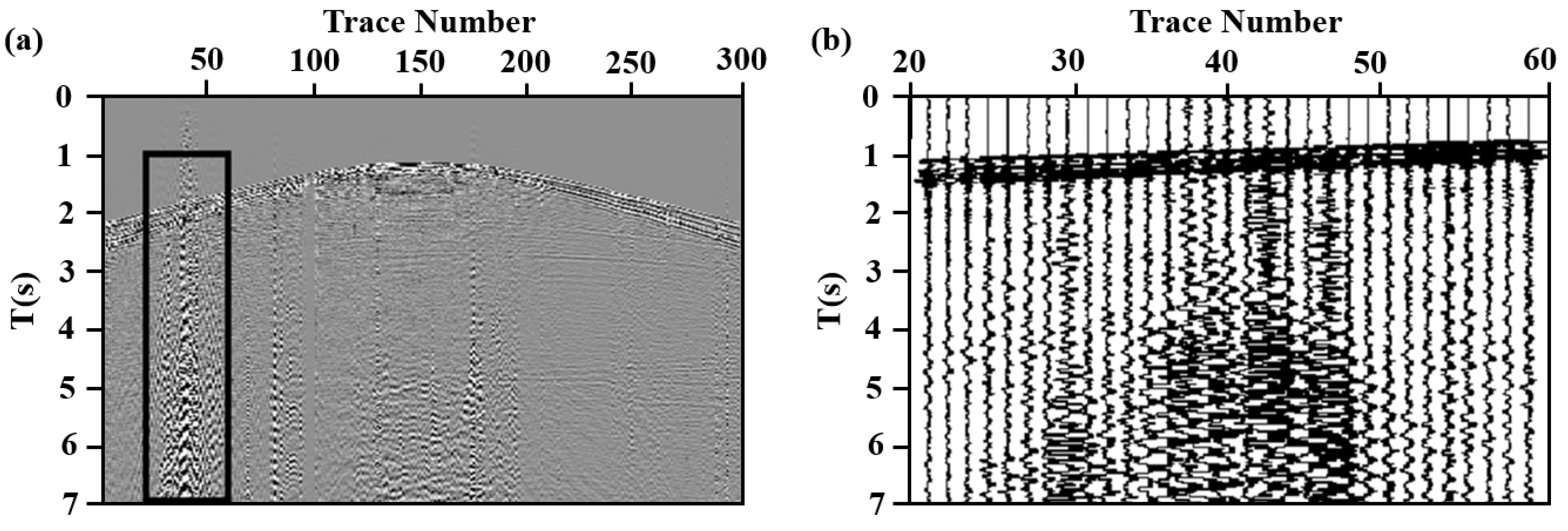
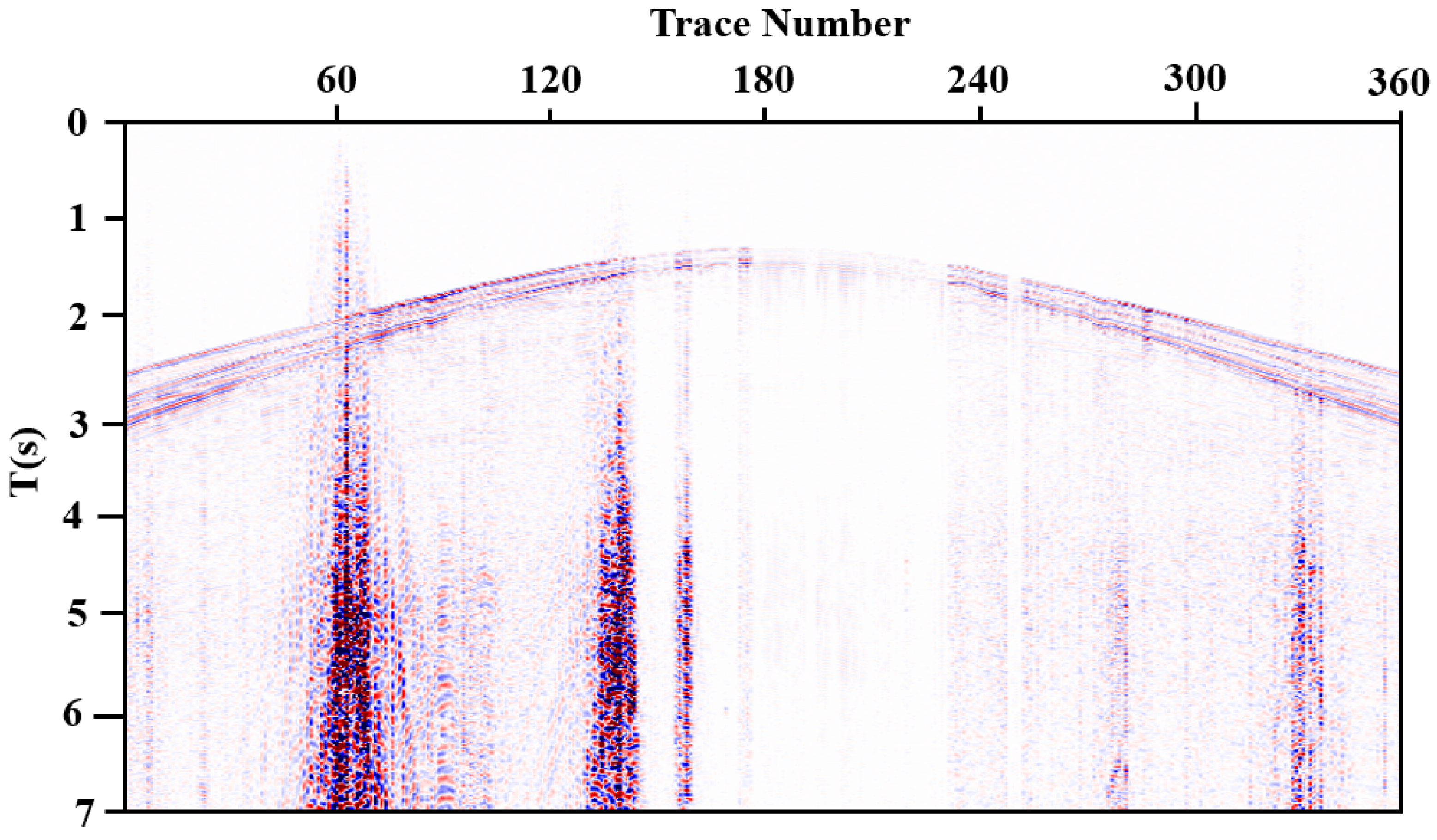
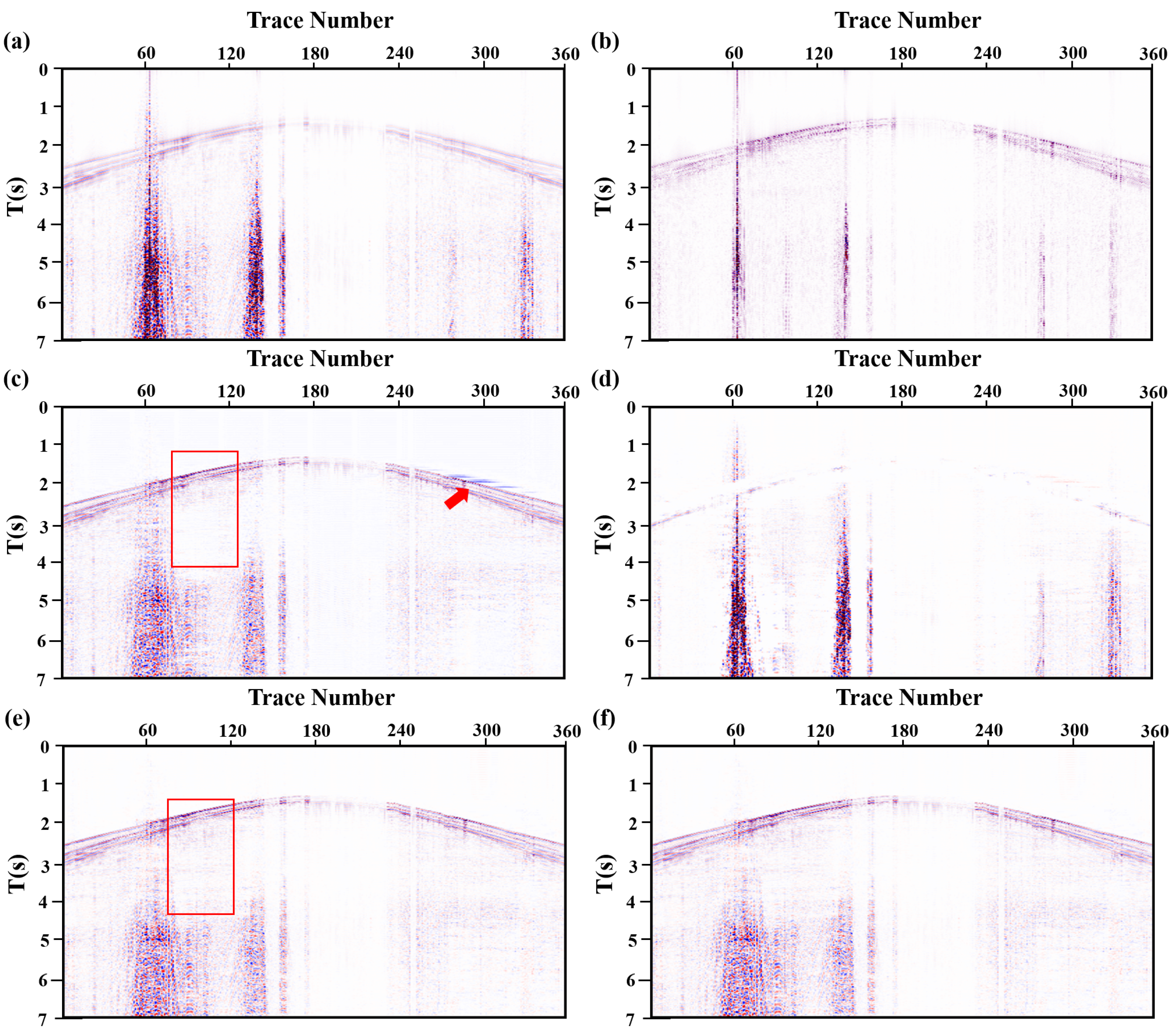
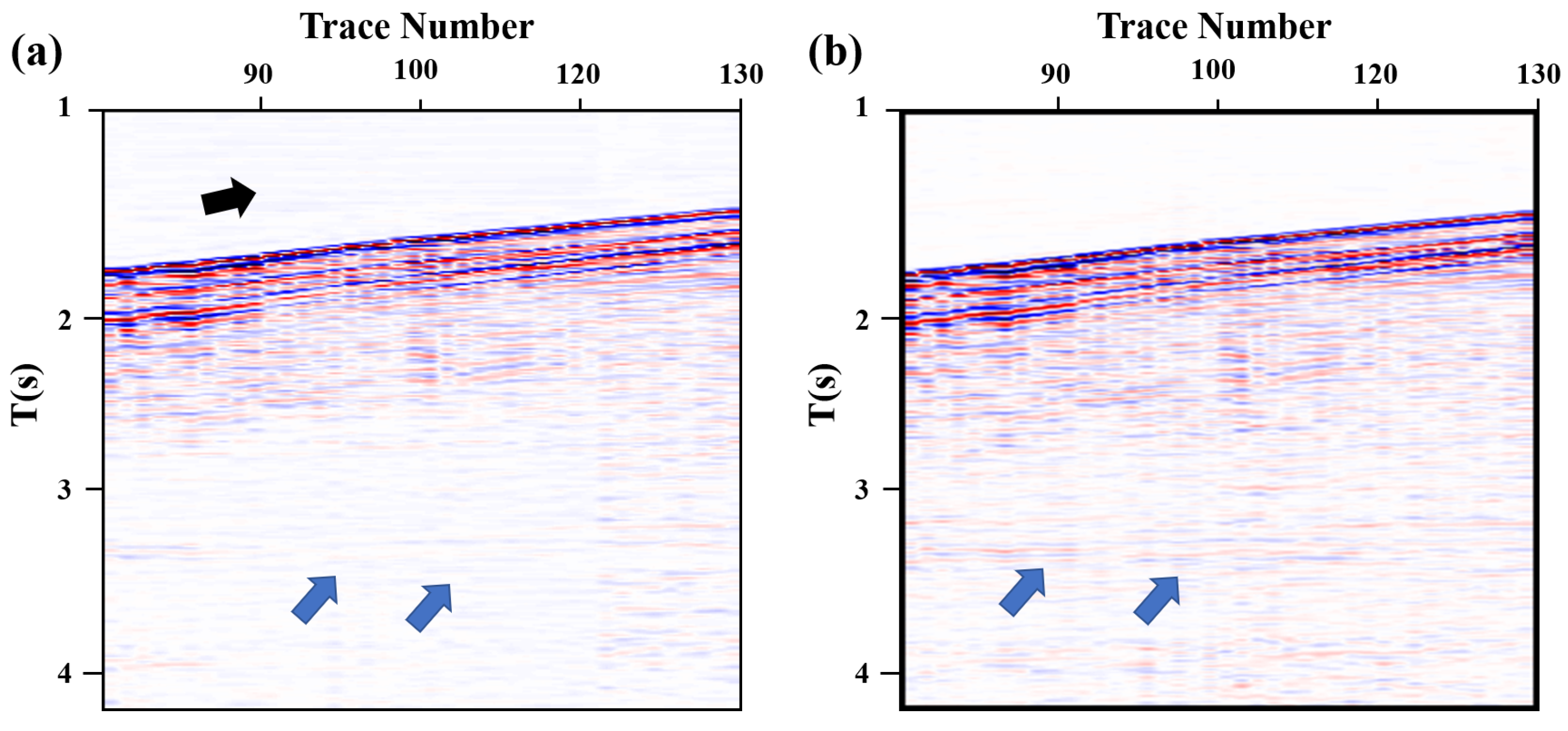
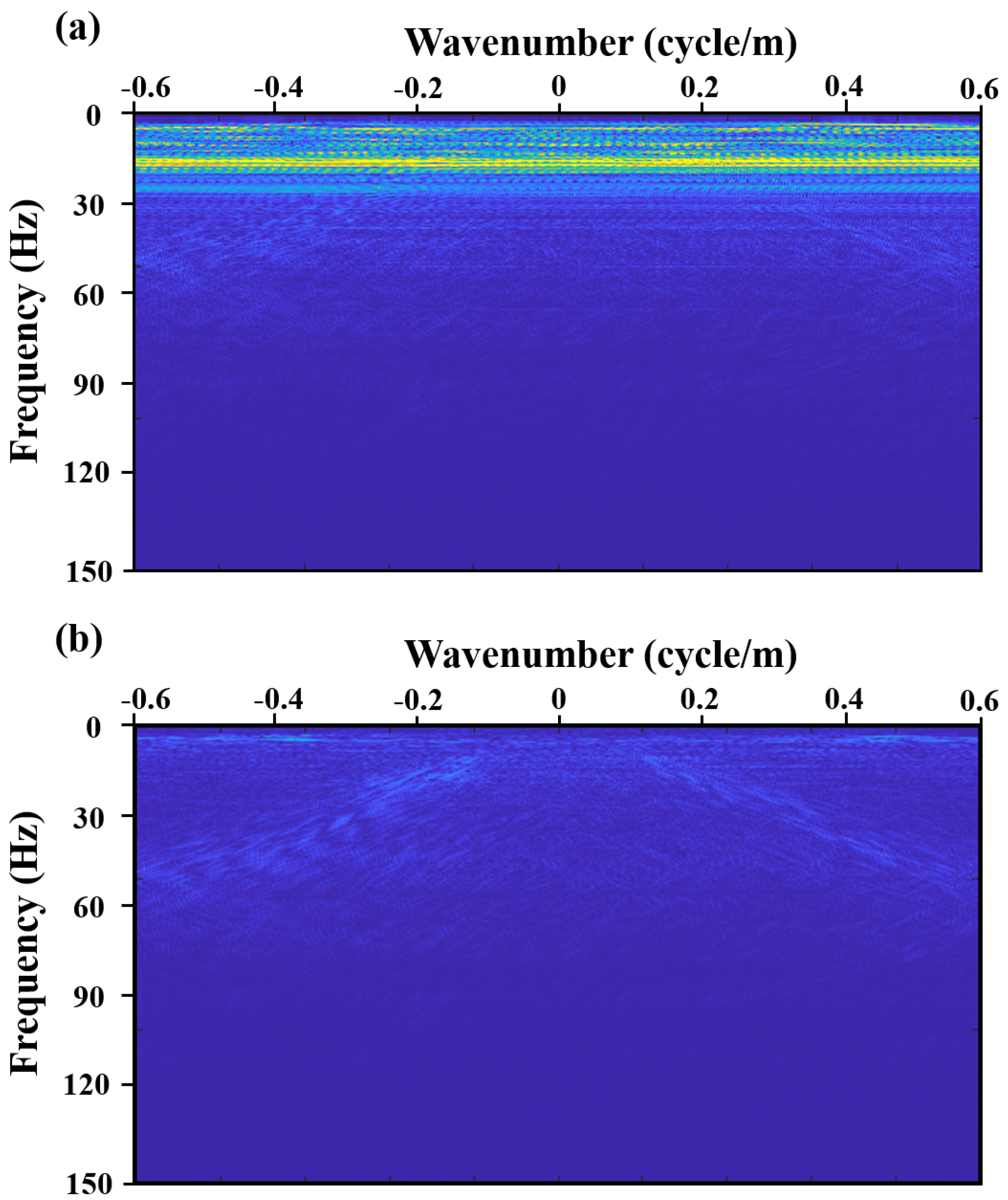
4.2. Real Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CNN | convolution neural networks |
| ACB | asymmetric convolution blocks |
| ACB-UNet | U-Net with asymmetric convolution blocks |
References
- Zhong, T.; Cheng, M.; Dong, X.; Li, Y.; Wu, N. Seismic random noise suppression by using deep residual U-Net. J. Pet. Sci. Eng. 2022, 209, 109901. [Google Scholar] [CrossRef]
- Zhu, W.; Mousavi, S.M.; Beroza, G.C. Seismic signal denoising and decomposition using deep neural networks. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9476–9488. [Google Scholar] [CrossRef] [Green Version]
- Chirtu, M.A.; Radoi, A. Seismic Signal Denoising using U-Net in the Time-Frequency Domain. In Proceedings of the 45th IEEE International Conference on Telecommunications and Signal Processing (TSP), Prague, Czech Republic, 13–15 July 2022; pp. 6–10. [Google Scholar]
- Sun, L.; Qiu, X.; Wang, Y.; Wang, C. Seismic Periodic Noise Attenuation Based on Sparse Representation Using a Noise Dictionary. Appl. Sci. 2023, 13, 2835. [Google Scholar] [CrossRef]
- Guo, J.; Lin, D. High-amplitude noise attenuation. In SEG Technical Program Expanded Abstracts 2003; Society of Exploration Geophysicists: Houston, TX, USA, 2003; pp. 1893–1896. [Google Scholar]
- Schonewille, M.; Vigner, A.; Ryder, A. Swell-noise attenuation using an iterative FX prediction filtering approach. In Proceedings of the 2008 SEG Annual Meeting, OnePetro, Las Vegas, NV, USA, 9–14 November 2008. [Google Scholar]
- Bekara, M.; van der Baan, M. High-amplitude noise detection by the expectation-maximization algorithm with application to swell-noise attenuation. Geophysics 2010, 75, V39–V49. [Google Scholar] [CrossRef] [Green Version]
- Wu, B.; Yu, J.; Ren, H.; Lou, Y.; Liu, N. Seismic traffic noise attenuation using l_{p}-norm robust PCA. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1998–2001. [Google Scholar] [CrossRef]
- Tsai, K.C.; Hu, W.; Wu, X.; Chen, J.; Han, Z. First-break automatic picking with deep semisupervised learning neural network. In SEG Technical Program Expanded Abstracts 2018; Society of Exploration Geophysicists: Houston, TX, USA, 2018; pp. 2181–2185. [Google Scholar]
- Hollander, Y.; Merouane, A.; Yilmaz, O. Using a deep convolutional neural network to enhance the accuracy of first-break picking. In Proceedings of the 2018 SEG International Exposition and Annual Meeting, OnePetro, Anaheim, CA, USA, 14–19 October 2018. [Google Scholar]
- Chai, X.; Tang, G.; Wang, S.; Peng, R.; Chen, W.; Li, J. Deep learning for regularly missing data reconstruction. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4406–4423. [Google Scholar] [CrossRef]
- Siahkoohi, A.; Kumar, R.; Herrmann, F. Seismic data reconstruction with generative adversarial networks. In Proceedings of the 80th EAGE Conference and Exhibition, Copenhagen, Denmark, 11–14 June 2018; European Association of Geoscientists & Engineers: Amsterdam, The Netherlands, 2018; Volume 2018, pp. 1–5. [Google Scholar]
- Li, S.; Liu, B.; Ren, Y.; Chen, Y.; Yang, S.; Wang, Y.; Jiang, P. Deep-learning inversion of seismic data. arXiv 2019, arXiv:1901.07733. [Google Scholar] [CrossRef] [Green Version]
- Yang, F.; Ma, J. Deep-learning inversion: A next-generation seismic velocity model building method. Geophysics 2019, 84, R583–R599. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Zhang, Q.; Yusifov, A.; Shi, Y. Applications of supervised deep learning for seismic interpretation and inversion. Lead. Edge 2019, 38, 526–533. [Google Scholar] [CrossRef]
- Tian, C.; Fei, L.; Zheng, W.; Xu, Y.; Zuo, W.; Lin, C.W. Deep learning on image denoising: An overview. Neural Netw. 2020, 131, 251–275. [Google Scholar] [CrossRef]
- Yu, S.; Ma, J.; Wang, W. Deep learning for denoisingDeep learning for denoising. Geophysics 2019, 84, V333–V350. [Google Scholar] [CrossRef]
- Li, W.; Liu, H.; Wang, J. A deep learning method for denoising based on a fast and flexible convolutional neural network. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–13. [Google Scholar] [CrossRef]
- Qiu, C.; Wu, B.; Liu, N.; Zhu, X.; Ren, H. Deep learning prior model for unsupervised seismic data random noise attenuation. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Lan, T.; Zeng, Z.; Han, L.; Zeng, J. Seismic Data Denoising Based on Wavelet Transform and the Residual Neural Network. Appl. Sci. 2023, 13, 655. [Google Scholar] [CrossRef]
- Ji, G.; Wang, C. A Denoising Method for Seismic Data Based on SVD and Deep Learning. Appl. Sci. 2022, 12, 12840. [Google Scholar] [CrossRef]
- Xu, Z.; Luo, Y.; Wu, B.; Meng, D. S2S-WTV: Seismic Data Noise Attenuation Using Weighted Total Variation Regularized Self-Supervised Learning. arXiv 2022, arXiv:2212.13523. [Google Scholar]
- Zhao, H.; Bai, T.; Chen, Y. Background Noise Suppression for DAS-VSP Records Using GC-AB-Unet. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Tibi, R.; Hammond, P.; Brogan, R.; Young, C.J.; Koper, K. Deep learning denoising applied to regional distance seismic data in Utah. Bull. Seismol. Soc. Am. 2021, 111, 775–790. [Google Scholar] [CrossRef]
- Saad, O.M.; Chen, Y. Deep denoising autoencoder for seismic random noise attenuation. Geophysics 2020, 85, V367–V376. [Google Scholar] [CrossRef]
- Wang, F.; Chen, S. Residual learning of deep convolutional neural network for seismic random noise attenuation. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1314–1318. [Google Scholar] [CrossRef]
- Cui, R.; Cao, D.; Liu, Q.; Zhu, Z.; Jia, Y. VP and VS prediction from digital rock images using a combination of U-Net and convolutional neural networks. Velocity prediction from digital rock by DL. Geophysics 2021, 86, MR27–MR37. [Google Scholar] [CrossRef]
- Liu, J.; Lu, W.; Zhang, P. Random noise attenuation using convolutional neural networks. In Proceedings of the 80th EAGE Conference and Exhibition, Copenhagen, Denmark, 11–14 June 2018; European Association of Geoscientists & Engineers: Amsterdam, The Netherlands, 2018; Volume 2018, pp. 1–5. [Google Scholar]
- Zeng, Y.; Jiang, K.; Chen, J. Automatic seismic salt interpretation with deep convolutional neural networks. In Proceedings of the 2019 3rd International Conference on Information System and Data Mining, Houston, TX, USA, 6–8 April 2019; pp. 16–20. [Google Scholar]
- Sun, J.; Slang, S.; Elboth, T.; Greiner, T.L.; McDonald, S.; Gelius, L.J. Attenuation of marine seismic interference noise employing a customized U-Net. Geophys. Prospect. 2020, 68, 845–871. [Google Scholar] [CrossRef]
- Meng, F.; Fan, Q.; Li, Y. Self-supervised learning for seismic data reconstruction and denoising. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Li, Z.; Jia, J.; Lu, Z.; Jiao, J.; Yu, P. Seismic Velocity Anomalies Detection Based on a Modified U-Net Framework. Appl. Sci. 2022, 12, 7225. [Google Scholar] [CrossRef]
- Cai, J.; Wang, L.; Zheng, J.; Duan, Z.; Li, L.; Chen, N. Denoising Method for Seismic Co-Band Noise Based on a U-Net Network Combined with a Residual Dense Block. Appl. Sci. 2023, 13, 1324. [Google Scholar] [CrossRef]
- Wu, J.; Shi, Y.; Wang, W. Fault imaging of seismic data based on a modified U-net with dilated convolution. Appl. Sci. 2022, 12, 2451. [Google Scholar] [CrossRef]
- Ding, X.; Guo, Y.; Ding, G.; Han, J. ACNET: Strengthening the kernel skeletons for powerful CNN via asymmetric convolution blocks. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 1911–1920. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Yuan, Y.; Zheng, Y.; Si, X. Attenuation of linear noise based on denoising convolutional neural network with asymmetric convolution blocks. Explor. Geophys. 2021, 53, 532–546. [Google Scholar] [CrossRef]
- Zhang, W.; Jiang, K.; Wang, L.; Meng, N.; Zhou, Y.; Li, Y.; Hu, H.; Chen, X.; Jiang, B. A Wavelet-Based Asymmetric Convolution Network for Single Image Super-Resolution. IEEE Access 2021, 9, 28976–28986. [Google Scholar] [CrossRef]
- Hu, L.; Zhang, H.; Wang, Z.; Huang, C.; Zhang, C. Self-supervised monocular depth estimation via asymmetric convolution block. IET Cyber-Syst. Robot. 2022, 4, 131–138. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Z.; Chen, X.; Cao, D.; Cheng, M.; Ding, S. U-Net with Asymmetric Convolution Blocks for Road Traffic Noise Attenuation in Seismic Data. Appl. Sci. 2023, 13, 4751. https://doi.org/10.3390/app13084751
Zhu Z, Chen X, Cao D, Cheng M, Ding S. U-Net with Asymmetric Convolution Blocks for Road Traffic Noise Attenuation in Seismic Data. Applied Sciences. 2023; 13(8):4751. https://doi.org/10.3390/app13084751
Chicago/Turabian StyleZhu, Zhaolin, Xin Chen, Danping Cao, Mingxin Cheng, and Shuaimin Ding. 2023. "U-Net with Asymmetric Convolution Blocks for Road Traffic Noise Attenuation in Seismic Data" Applied Sciences 13, no. 8: 4751. https://doi.org/10.3390/app13084751