

Dynamic Characteristics and Fault Mechanism of the Gear Tooth Spalling in Railway Vehicles under Traction Conditions

Abstract
:1. Introduction
2. Dynamic Modeling of a Railway Vehicle
2.1. Vehicle Model
2.2. Wheel–Rail Interaction
2.3. Gear Meshing Force
3. TVMS Modeling of Gear Tooth Spalling
4. Dynamic Characteristics and Fault Mechanism Analysis
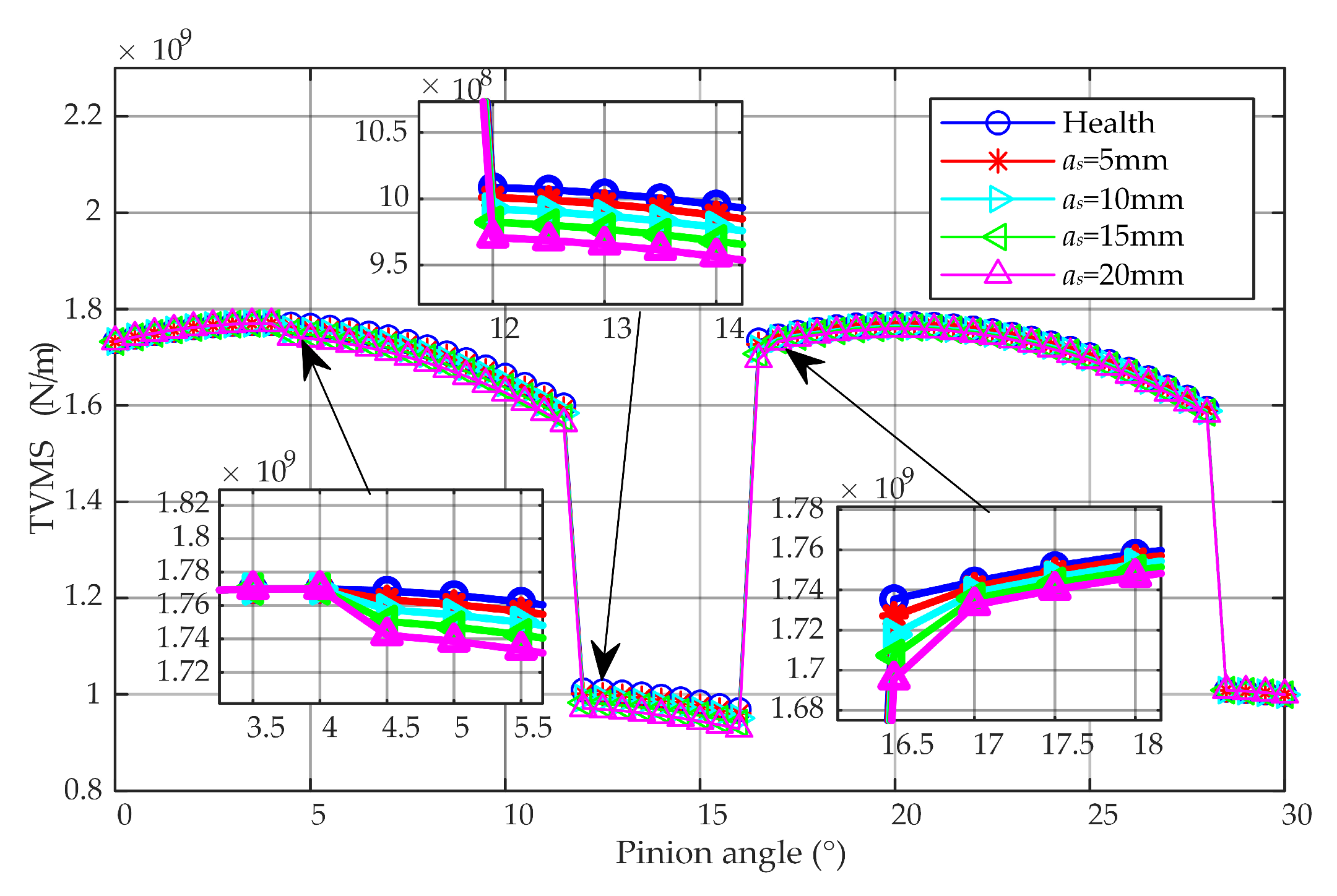
4.1. TVMS Analysis
4.2. Dynamic Characteristics Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
References
- Chen, S.; Wang, K.; Chang, C.; Xie, B.; Zhai, W. A Two-Level Adaptive Chirp Mode Decomposition Method for the Railway Wheel Flat Detection under Variable-Speed Conditions. J. Sound Vib. 2021, 498, 115963. [Google Scholar] [CrossRef]
- Xie, B.; Chen, S.; Xu, M.; Dong, M.; Wang, K. Parameter Identification of Wheel Polygonization Based on Effective Signal Extraction and Inertial Principle. IEEE Sens. J. 2023, 23, 5061–5072. [Google Scholar] [CrossRef]
- Chen, S.; Wang, K.; Zhou, Z.; Yang, Y.; Chen, Z.; Zhai, W. Quantitative Detection of Locomotive Wheel Polygonization under Non-Stationary Conditions by Adaptive Chirp Mode Decomposition. Rail. Eng. Sci. 2022, 30, 129–147. [Google Scholar] [CrossRef]
- Bai, Y.; Yang, J.; Wang, J.; Zhao, Y.; Li, Q. Image Representation of Vibration Signals and Its Application in Intelligent Compound Fault Diagnosis in Railway Vehicle Wheelset-Axlebox Assemblies. Mech. Syst. Signal Process. 2021, 152, 107421. [Google Scholar] [CrossRef]
- Ye, Y.; Huang, C.; Zeng, J.; Zhou, Y.; Li, F. Shock Detection of Rotating Machinery Based on Activated Time-Domain Images and Deep Learning: An Application to Railway Wheel Flat Detection. Mech. Syst. Signal Process. 2023, 186, 109856. [Google Scholar] [CrossRef]
- Ma, H.; Li, Z.; Feng, M.; Feng, R.; Wen, B. Time-Varying Mesh Stiffness Calculation of Spur Gears with Spalling Defect. Eng. Fail. Anal. 2016, 66, 166–176. [Google Scholar] [CrossRef]
- Wan, Z.; Cao, H.; Zi, Y.; He, W.; Chen, Y. Mesh Stiffness Calculation Using an Accumulated Integral Potential Energy Method and Dynamic Analysis of Helical Gears. Mech. Mach. Theory 2015, 92, 447–463. [Google Scholar] [CrossRef]
- Ma, H.; Pang, X.; Feng, R.; Zeng, J.; Wen, B. Improved Time-Varying Mesh Stiffness Model of Cracked Spur Gears. Eng. Fail. Anal. 2015, 55, 271–287. [Google Scholar] [CrossRef]
- Chaari, F.; Baccar, W.; Abbes, M.S.; Haddar, M. Effect of Spalling or Tooth Breakage on Gearmesh Stiffness and Dynamic Response of a One-Stage Spur Gear Transmission. Eur. J. Mech. A/Solids 2008, 27, 691–705. [Google Scholar] [CrossRef]
- Wan, Z.; Cao, H.; Zi, Y.; He, W.; He, Z. An Improved Time-Varying Mesh Stiffness Algorithm and Dynamic Modeling of Gear-Rotor System with Tooth Root Crack. Eng. Fail. Anal. 2014, 42, 157–177. [Google Scholar] [CrossRef]
- Chen, K.; Ma, H.; Che, L.; Li, Z.; Wen, B. Comparison of Meshing Characteristics of Helical Gears with Spalling Fault Using Analytical and Finite-Element Methods. Mech. Syst. Signal Process. 2019, 121, 279–298. [Google Scholar] [CrossRef]
- Wang, J.; Yang, J.; Lin, Y.; He, Y. Analytical Investigation of Profile Shifts on the Mesh Stiffness and Dynamic Characteristics of Spur Gears. Mech. Mach. Theory 2022, 167, 104529. [Google Scholar] [CrossRef]
- Ma, H.; Zeng, J.; Feng, R.; Pang, X.; Wang, Q.; Wen, B. Review on Dynamics of Cracked Gear Systems. Eng. Fail. Anal. 2015, 55, 224–245. [Google Scholar] [CrossRef]
- Shen, Z.; Qiao, B.; Yang, L.; Luo, W.; Chen, X. Evaluating the Influence of Tooth Surface Wear on TVMS of Planetary Gear Set. Mech. Mach. Theory 2019, 136, 206–223. [Google Scholar] [CrossRef]
- Lei, Y.; Liu, Z.; Wang, D.; Yang, X.; Liu, H.; Lin, J. A Probability Distribution Model of Tooth Pits for Evaluating Time-Varying Mesh Stiffness of Pitting Gears. Mech. Syst. Signal Process. 2018, 106, 355–366. [Google Scholar] [CrossRef]
- Liang, X.; Zuo, M.J.; Feng, Z. Dynamic Modeling of Gearbox Faults: A Review. Mech. Syst. Signal Process. 2018, 98, 852–876. [Google Scholar] [CrossRef]
- Yang, L.; Shao, Y.; Jiang, W.; Zhang, L.; Wang, L.; Xu, J. Effects of Tooth Surface Crack Propagation on Meshing Stiffness and Vibration Characteristic of Spur Gear System. Appl. Sci. 2021, 11, 1968. [Google Scholar] [CrossRef]
- Shi, L.; Wen, J.; Pan, B.; Xiang, Y.; Zhang, Q.; Lin, C. Dynamic Characteristics of a Gear System with Double-Teeth Spalling Fault and Its Fault Feature Analysis. Appl. Sci. 2020, 10, 7058. [Google Scholar] [CrossRef]
- Luo, Y.; Baddour, N.; Liang, M. Dynamical Modeling and Experimental Validation for Tooth Pitting and Spalling in Spur Gears. Mech. Syst. Signal Process. 2019, 119, 155–181. [Google Scholar] [CrossRef]
- Chen, T.; Wang, Y.; Chen, Z. A Novel Distribution Model of Multiple Teeth Pits for Evaluating Time-Varying Mesh Stiffness of External Spur Gears. Mech. Syst. Signal Process. 2019, 129, 479–501. [Google Scholar] [CrossRef]
- Wu, X.; Luo, Y.; Li, Q.; Shi, J. A New Analytical Model for Evaluating the Time-Varying Mesh Stiffness of Helical Gears in Healthy and Spalling Cases. Eng. Fail. Anal. 2022, 131, 105842. [Google Scholar] [CrossRef]
- Yang, X.; Ding, K.; He, G. Phenomenon-Model-Based AM-FM Vibration Mechanism of Faulty Spur Gear. Mech. Syst. Signal Process. 2019, 134, 106366. [Google Scholar] [CrossRef]
- Feng, K.; Ji, J.C.; Ni, Q.; Li, Y.; Mao, W.; Liu, L. A Novel Vibration-Based Prognostic Scheme for Gear Health Management in Surface Wear Progression of the Intelligent Manufacturing System. Wear 2023, 204697. [Google Scholar] [CrossRef]
- Wang, J.; Yang, J.; Wang, Y.; Bai, Y.; Zhang, T.; Yao, D. Ensemble Decision Approach with Dislocated Time–Frequency Representation and Pre-Trained CNN for Fault Diagnosis of Railway Vehicle Gearboxes under Variable Conditions. Int. J. Rail Transp. 2022, 10, 655–673. [Google Scholar] [CrossRef]
- Ye, Y.; Zhu, B.; Huang, P.; Peng, B. OORNet: A Deep Learning Model for on-Board Condition Monitoring and Fault Diagnosis of out-of-Round Wheels of High-Speed Trains. Measurement 2022, 199, 111268. [Google Scholar] [CrossRef]
- Hu, Z.; Yang, J.; Yao, D.; Wang, J.; Bai, Y. Subway Gearbox Fault Diagnosis Algorithm Based on Adaptive Spline Impact Suppression. Entropy 2021, 23, 660. [Google Scholar] [CrossRef]
- Wang, J.; Yang, J.; Bai, Y.; Zhao, Y.; He, Y.; Yao, D. A Comparative Study of the Vibration Characteristics of Railway Vehicle Axlebox Bearings with Inner/Outer Race Faults. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2021, 235, 1035–1047. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, Q.; Yang, J.; Liu, C.; Wang, J. A Lagrangian Approach for the Railway Vehicle with Gear System Coupled Model Considering Wheel Polygonal Faults under Traction Conditions. J. Vib. Control 2023, 107754632311621. [Google Scholar] [CrossRef]
- Yang, J.; Zhao, Y.; Wang, J.; Liu, C.; Bai, Y. Influence of Wheel Flat on Railway Vehicle Helical Gear System under Traction/Braking Conditions. Eng. Fail. Anal. 2022, 134, 106022. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Z.; Ning, J.; Wang, K.; Zhai, W. Improved Dynamics Model of Locomotive Traction Motor with Elasticity of Rotor Shaft and Supporting Bearings. Chin. J. Mech. Eng. 2022, 35, 90. [Google Scholar] [CrossRef]
- Wang, J.; Yang, J.; Zhao, Y.; Bai, Y.; He, Y. Nonsmooth Dynamics of a Gear–Wheelset System of Railway Vehicles Under Traction/Braking Conditions. J. Comput. Nonlinear Dyn. 2020, 15, 081003. [Google Scholar] [CrossRef]
- Wang, J.; Lv, B.; Zhao, Y. Chaos and Stability of Spur Gear Transmission System for Locomotive Based on Energy Method and Floquet Theory. Shock Vib. 2018, 2018, 5691892. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Yang, J.; Li, Q. Quasi-Static Analysis of the Nonlinear Behavior of a Railway Vehicle Gear System Considering Time-Varying and Stochastic Excitation. Nonlinear Dyn. 2018, 93, 463–485. [Google Scholar] [CrossRef]
- Ren, Z.; Xin, X.; Sun, G.; Wei, X. The Effect of Gear Meshing on the High-Speed Vehicle Dynamics. Veh. Syst. Dyn. 2021, 59, 743–764. [Google Scholar] [CrossRef]
- Chen, Z.; Zhai, W.; Wang, K. Dynamic Investigation of a Locomotive with Effect of Gear Transmissions under Tractive Conditions. J. Sound Vib. 2017, 408, 220–233. [Google Scholar] [CrossRef]
- Zhang, T.; Jin, T.; Zhou, Z.; Chen, Z.; Wang, K. Dynamic Modeling of a Metro Vehicle Considering the Motor–Gearbox Transmission System under Traction Conditions. Mech. Sci. 2022, 13, 603–617. [Google Scholar] [CrossRef]
- Yuan, Z.; Wu, M.; Tian, C.; Zhou, J.; Chen, C. A Review on the Application of Friction Models in Wheel-Rail Adhesion Calculation. Urban Rail Transit 2021, 7, 1–11. [Google Scholar] [CrossRef]
- Zhu, B.; Zhang, C.; Zhang, Z.; Luo, L.; Bai, X. Dynamic Analysis of Suspension-Type Monorail Long-Span Cable-Stayed Bridge in a Wind-Vehicle-Bridge System. Urban Rail Transit 2023, 9, 19–30. [Google Scholar] [CrossRef]
- Megna, G.; Bracciali, A. Gearless Track-Friendly Metro with Guided Independently Rotating Wheels. Urban Rail Transit 2021, 7, 285–300. [Google Scholar] [CrossRef]
- Zhang, K.; Yang, J.; Liu, C.; Wang, J.; Yao, D. Dynamic Characteristics of a Traction Drive System in High-Speed Train Based on Electromechanical Coupling Modeling under Variable Conditions. Energies 2022, 15, 1202. [Google Scholar] [CrossRef]
- Wang, X.; Peng, T.; Wu, P.; Cui, L. Influence of Electrical Part of Traction Transmission on Dynamic Characteristics of Railway Vehicles Based. Sci. Rep. 2021, 11, 18409. [Google Scholar] [CrossRef]
- Wang, Z.; Yin, Z.; Wang, R.; Cheng, Y.; Allen, P.; Zhang, W. Coupled Dynamic Behaviour of a Transmission System with Gear Eccentricities for a High-Speed Train. Veh. Syst. Dyn. 2021, 59, 613–634. [Google Scholar] [CrossRef]
- Yang, J.; Sun, R.; Yao, D.; Wang, J.; Liu, C. Nonlinear Dynamic Analysis of High Speed Multiple Units Gear Transmission System with Wear Fault. Mech. Sci. 2019, 10, 187–197. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Sun, Q.; Chen, C. Damage Degree Detection of Cracks in a Locomotive Gear Transmission System. Shock Vib. 2018, 2018, 1–14. [Google Scholar] [CrossRef]
- Chen, Z.; Zhai, W.; Wang, K. Vibration Feature Evolution of Locomotive with Tooth Root Crack Propagation of Gear Transmission System. Mech. Syst. Signal Process. 2019, 115, 29–44. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| Mc | 35,400 kg | Ic | 1,970,300 kg·m2 |
| Mb | 3188 kg | Ib | 2710 kg·m2 |
| Ma | 85 kg | Ia | 2.45 kg·m2 |
| Mw | 1024 kg | Iw | 78 kg·m2 |
| Mp | 5.15 kg | Ip | 0.007 kg·m2 |
| Mgh | 149.75 kg | Igh | 10.45 kg·m2 |
| Mmr | 178.36 kg | Imr | 1.9 kg·m2 |
| Mmh | 422.82 kg | Imh | 24.7 kg·m2 |
| Kxs | 4.41 × 105 N/m | Kzs | 2.06 ×105 N/m |
| Cxp | 1.25 × 103 N·s/m | Czp | 2 × 103 N·s/m |
| Cxs | 2.5 × 103 N·s/m | Czs | 6 × 104 N·s/m |
| Kb | 1 × 108 N/m | Cb | 1 × 103 N·s/m |
| Kzgh | 5 × 106 N/m | Czmh | 1 × 103 N·s/m |
| Kxmh | 1 × 109 N/m | Cxmh | 1 × 103 N·s/m |
| Kzmh | 1 × 109 N/m | Czmh | 1 × 103 N·s/m |
| lskc | 6.3 m | lepkb | 1.375 m |
| lipkb | 0.825 m | lepka | 0.275 m |
| lipka | 0.275 m | lpbgh | 0.178 m |
| lgbgh | 0.183 m | lmhmh | 0.329 m |
| Parameters | Pinion | Gear |
|---|---|---|
| Tooth number | 22 | 133 |
| Module (mm) | 5 | 5 |
| Pressure angle (°) | 20 | 20 |
| Young’s modulus (Gpa) | 206 | 206 |
| Poisson’s ratio | 0.3 | 0.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Y.; Li, J.; Chen, P.; Su, Y.; Wang, J. Dynamic Characteristics and Fault Mechanism of the Gear Tooth Spalling in Railway Vehicles under Traction Conditions. Appl. Sci. 2023, 13, 4656. https://doi.org/10.3390/app13084656
Lin Y, Li J, Chen P, Su Y, Wang J. Dynamic Characteristics and Fault Mechanism of the Gear Tooth Spalling in Railway Vehicles under Traction Conditions. Applied Sciences. 2023; 13(8):4656. https://doi.org/10.3390/app13084656
Chicago/Turabian StyleLin, Yunlei, Junbo Li, Peixuan Chen, Yongjie Su, and Jinhai Wang. 2023. "Dynamic Characteristics and Fault Mechanism of the Gear Tooth Spalling in Railway Vehicles under Traction Conditions" Applied Sciences 13, no. 8: 4656. https://doi.org/10.3390/app13084656