

Analysis of Acoustic Signal Propagation for Reliable Digital Communication along Exposed and Buried Water Pipes

Abstract
:1. Introduction
2. Theory—Analytical and Numerical Models
2.1. Analytical Model for Acoustic Attenuation
2.2. Numerical Model for Acoustic Attenuation
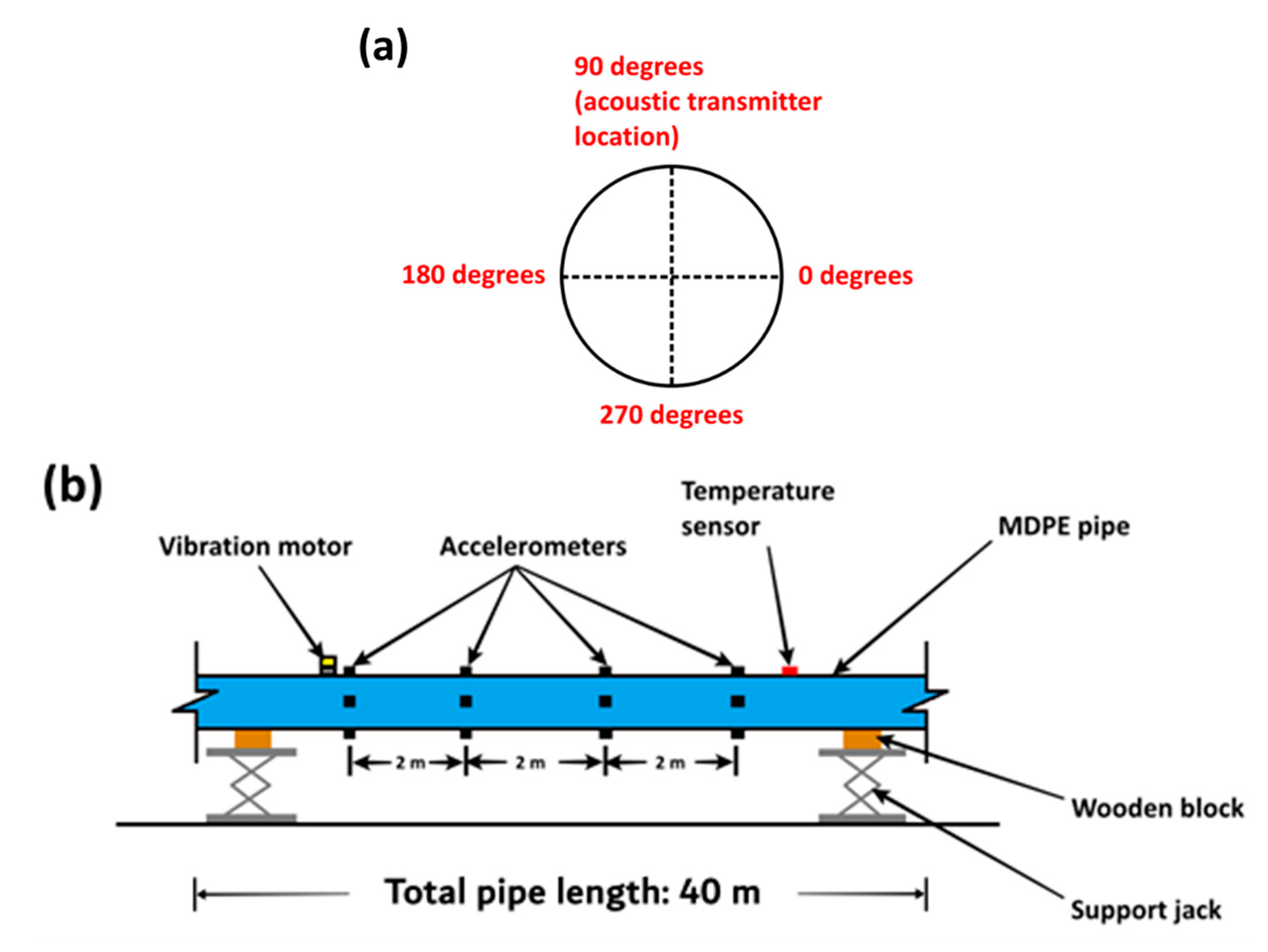
3. Experimental Setups
4. Results and Discussion
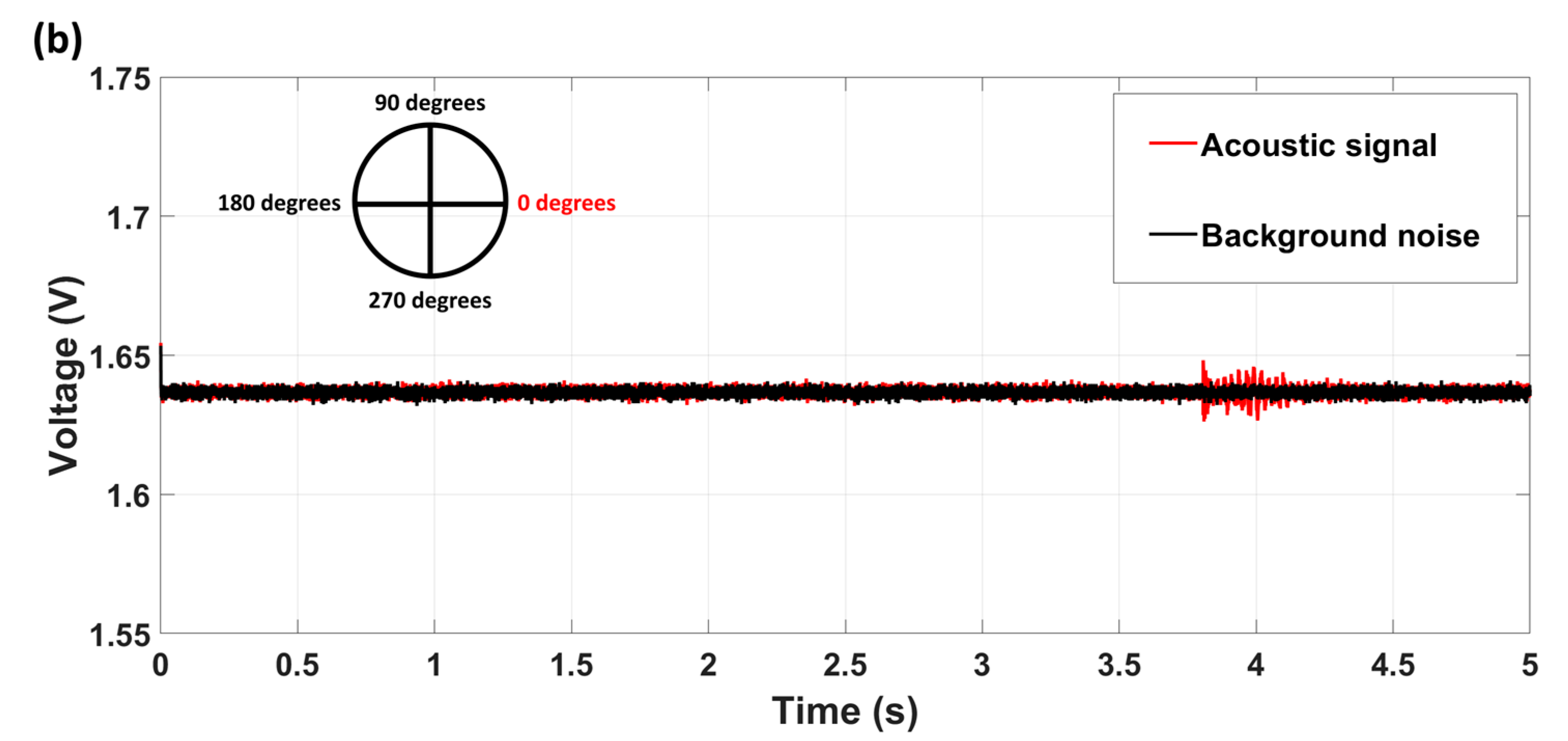
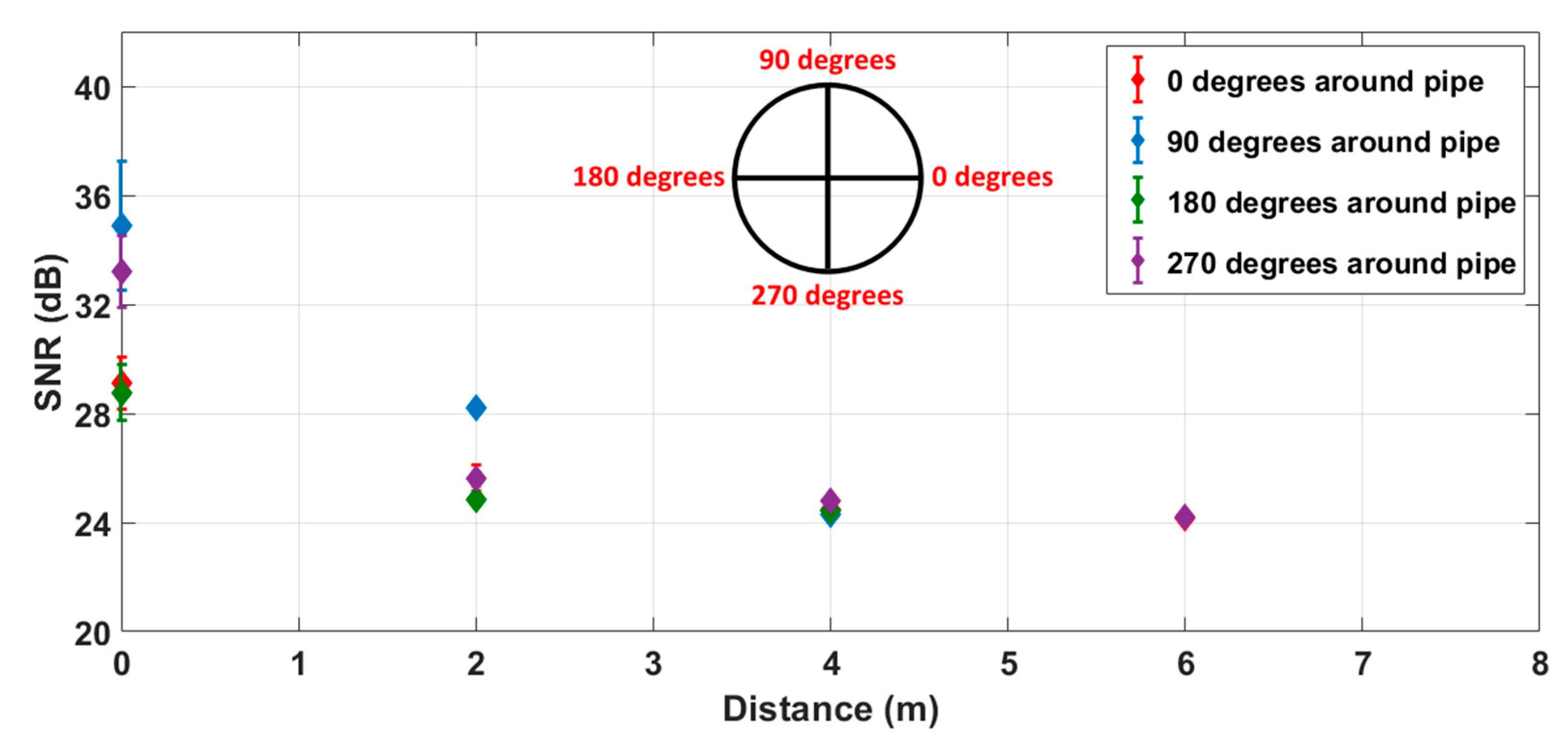
4.1. Acoustic Attenuation along Exposed MDPE Pipe
4.2. Acoustic Attenuation along Buried MDPE Pipe
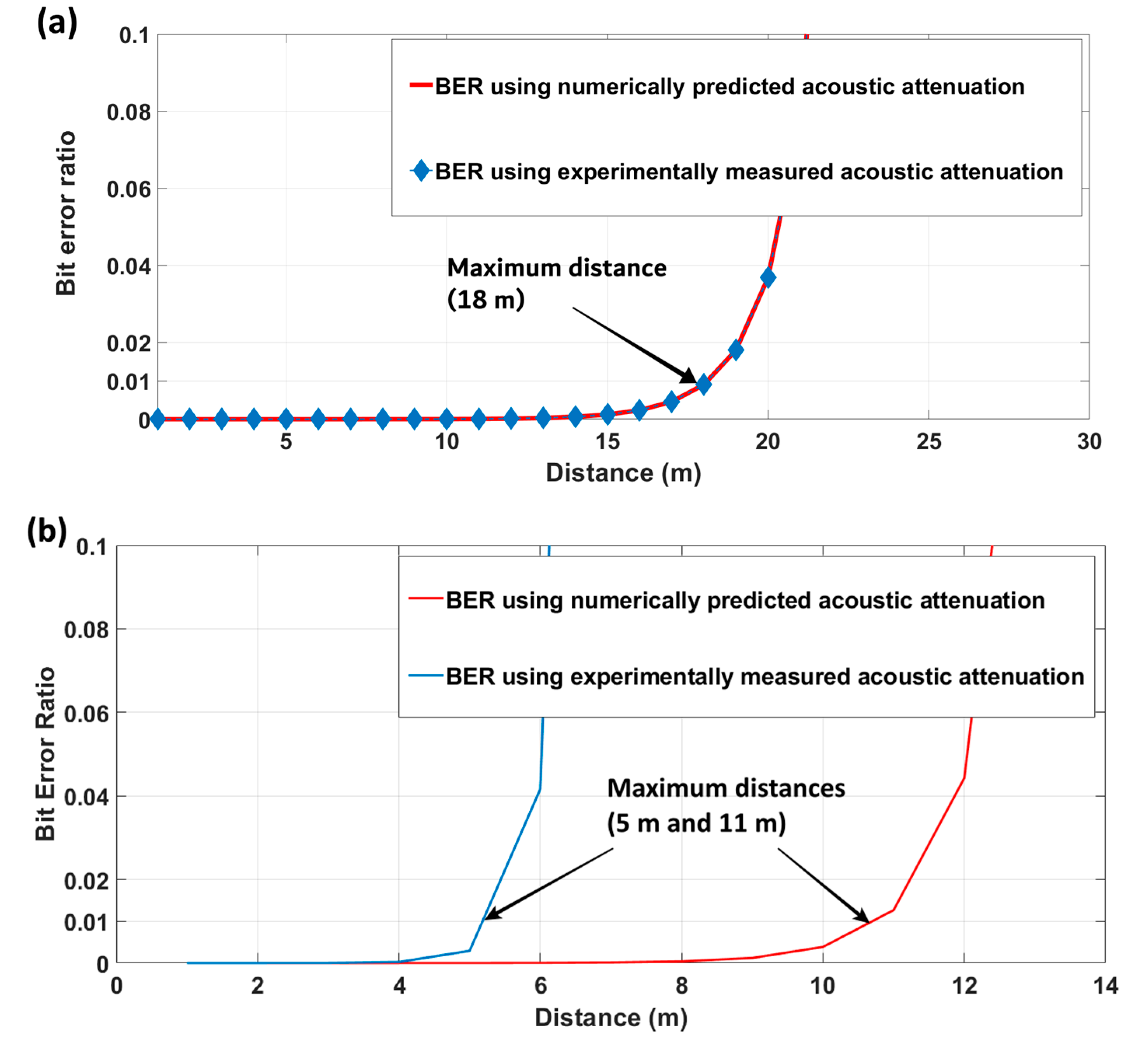
4.3. Data Communication Reliability along the MDPE Pipe
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yussof, N.A.; Ho, H.W. Review of Water Leak Detection Methods in Smart Building Applications. Buildings 2022, 12, 1535. [Google Scholar] [CrossRef]
- Islam, M.R.; Azam, S.; Shanmugam, B.; Mathur, D. A Review on Current Technologies and Future Direction of Water Leakage Detection in Water Distribution Network. IEEE Access 2022, 10, 107177–107201. [Google Scholar] [CrossRef]
- Datta, S.; Sarkar, S. A review on different pipeline fault detection methods. J. Loss Prev. Process Ind. 2016, 41, 97–106. [Google Scholar] [CrossRef]
- Liu, Z.; Kleiner, Y. State of the art review of inspection technologies for condition assessment of water pipes. Measurement 2013, 46, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Hao, T.; Rogers, C.D.F.; Metje, N.; Chapman, D.N.; Muggleton, J.M.; Foo, K.Y.; Wang, P.; Pennock, S.R.; Atkins, P.R.; Swingler, S.G.; et al. Condition assessment of the buried utility service infrastructure. Tunn. Undergr. Space Technol. 2012, 28, 331–344. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, X.; Li, Y.; Tie, Y.; Zhang, Y.; Gao, J. Water pipeline leakage detection based on machine learning and wireless sensor networks. Sensors 2019, 19, 5086. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- BenSaleh, M.S.; Qasim, S.M.; Obeid, A.M.; Garcia-Ortiz, A. A review on wireless sensor network for water pipeline monitoring applications. In Proceedings of the 2013 International Conference on Collaboration Technologies and Systems (CTS), San Diego, CA, USA, 20–24 May 2013; pp. 128–131. [Google Scholar]
- Whittle, A.J.; Allen, M.; Preis, A.; Iqbal, M. Sensor Networks for Monitoring and Control of Water Distribution Systems. In Proceedings of the 6th International Conference on Structural Health Monitoring of Intelligent Infrastructure (SHMII 2013), Hong Kong, China, 9–11 December 2013. [Google Scholar]
- Lin, K.; Hao, T. Experimental link quality analysis for LoRa-based wireless underground sensor networks. IEEE Internet Things J. 2020, 8, 6565–6577. [Google Scholar] [CrossRef]
- Sadeghioon, A.M.; Metje, N.; Chapman, D.N.; Anthony, C.J. SmartPipes: Smart wireless sensor networks for leak detection in water pipelines. J. Sens. Actuator Netw. 2014, 3, 64–78. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Vuran, M.C. Advanced texts in communications and networking. In Wireless Sensor Networks; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Jawhar, I.; Mohamed, N.; Shuaib, K. A framework for pipeline infrastructure monitoring using wireless sensor networks. In Proceedings of the 2007 Wireless Telecommunications Symposium, Pomona, CA, USA, 26–28 April 2007; pp. 1–7. [Google Scholar]
- Lin, M.; Wu, Y.; Wassell, I. Wireless sensor network: Water distribution monitoring system. In Proceedings of the 2008 IEEE Radio and Wireless Symposium, Orlando, FL, USA, 22–24 January 2008; pp. 775–778. [Google Scholar]
- Silva, A.R. Channel Characterization for Wireless Underground Sensor Networks. MSc Dissertation, University of Nebraska-Lincoln, Lincoln, NE, USA, 2010. [Google Scholar]
- Lin, K.; Hao, T. Link quality analysis of wireless sensor networks for underground infrastructure monitoring: A non-backfilled scenario. IEEE Sens. J. 2020, 21, 7006–7014. [Google Scholar] [CrossRef]
- Vuran, M.C.; Silva, A.R. Communication Through Soil in Wireless Underground Sensor Networks—Theory and Practice. In Sensor Networks. Signals and Communication Technology; Ferrari, G., Ed.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Sadeghioon, A. Design and Development of Wireless Underground Sensor Networks for Pipeline Monitoring. Ph.D. Thesis, University of Birmingham, Birmingham, UK, 2014. [Google Scholar]
- Abdorahimi, D. Comparison of Radio Frequency Path Loss Models in Soil for Wireless Underground Sensor Networks. Master’s Thesis, University of Birmingham, Birmingham, UK, 2018. [Google Scholar]
- Kokossalakis, G. Acoustic Data Communication System for In-Pipe Wireless Sensor Networks. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2006. [Google Scholar]
- Pal, M. Leak Detection and Location in Polyethylene Pipes. Ph.D. Thesis, Loughborough University, Loughborough, UK, 2008. [Google Scholar]
- Jin, Y.; Ying, Y.; Zhao, D. Data communications using guided elastic waves by time reversal pulse position modulation: Experimental study. Sensors 2013, 13, 8352–8376. [Google Scholar] [CrossRef] [PubMed]
- Long, R.; Cawley, P.; Lowe, M. Acoustic wave propagation in buried iron water pipes. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2003, 459, 2749–2770. [Google Scholar] [CrossRef]
- Muggleton, J.M.; Yan, J. Wavenumber prediction and measurement of axisymmetric waves in buried fluid-filled pipes: Inclusion of shear coupling at a lubricated pipe/soil interface. J. Sound Vib. 2013, 332, 1216–1230. [Google Scholar] [CrossRef] [Green Version]
- Muggleton, J.M.; Brennan, M.J.; Pinnington, R.J. Wavenumber prediction of waves in buried pipes for water leak detection. J. Sound Vib. 2002, 249, 939–954. [Google Scholar] [CrossRef]
- Muggleton, J.M.; Brennan, M.J.; Linford, P.W. Axisymmetric wave propagation in fluid-filled pipes: Wavenumber measurements in in vacuo and buried pipes. J. Sound Vib. 2004, 270, 171–190. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Waves in Solid Media; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Drodz, M.B. Efficient Finite Element Modeling of Ultrasound Waves in Elastic Media; Imperial College of London: London, UK, 2008. [Google Scholar]
- Precision Microdrives, Product Data Sheet. Uni Vibe. 8 mm Vibration Motor. 2015. Available online: https://www.precisionmicrodrives.com/product/datasheet/308-103-8mm-vibration-motor-20mm-type-datasheet.pdf (accessed on 30 January 2015).
- Farai, O.O. Novel Communication System for Buried Water Pipe Monitoring Using Acoustic Signal Propagation along the Pipe. Ph.D. Thesis, University of Birmingham, Birmingham, UK, 2021. [Google Scholar]
- Bilgin, Ö.; Stewart, H.E.; O’Rourke, T.D. Thermal and mechanical properties of polyethylene pipes. J. Mater. Civ. Eng. 2007, 19, 1043–1052. [Google Scholar] [CrossRef]
- Head, J.M.; Jardine, F.M. Ground-Borne Vibrations Arising from Piling (TN142D); CIRIA: London, UK, 1992. [Google Scholar]
- Mutagi, R.N. Digital Communications: Theory, Techniques, and Applications; Oxford University Press: Oxford, UK, 2012. [Google Scholar]
- Akyildiz, I.F.; Sun, Z.; Vuran, M.C. Signal propagation techniques for wireless underground communication networks. Phys. Commun. 2009, 2, 167–183. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pipe inner radius (m) | 0.0361 |
| Pipe wall thickness (m) | 0.0092 |
| Elastic modulus (N/m2) | 1.6 × 109 |
| Poisson’s ratio | 0.4 |
| Density (kg/m3) | 900 |
| Material loss factor | 0.06 |
| Longitudinal wave speed (m/s) | 1455 |
| Bulk modulus of water (N/m2) | 2.25 × 109 |
| Axial Distance from Acoustic Transmitter (m) | Average SNR at 0 Degrees around Pipe (dB) | Average SNR at 90 Degrees around Pipe (dB) | Average SNR at 180 Degrees around Pipe (dB) | Average SNR at 270 Degrees around Pipe (dB) |
|---|---|---|---|---|
| 0 | 29.1 | 34.9 | 28.8 | 33.2 |
| 2 | 25.6 | 28.2 | 24.9 | 25.6 |
| 4 | 24.5 | 24.3 | 24.2 | 24.8 |
| 6 | 24.2 | 24.2 | 24.2 | 24.2 |
| Circumferential Location of Acoustic Receivers | Measured Acoustic Attenuation Using Linear Fit (dB/m) | R2 Value |
|---|---|---|
| 0 degrees | 0.8 | 82% |
| 90 degrees | 1.8 | 86% |
| 180 degrees | 0.7 | 72% |
| 270 degrees | 1.4 | 73% |
| Average acoustic attenuation | dB/m |
| Pipe inner radius (mm) | Acoustic attenuation (dB/m) |
|---|---|
| 15.8 | 2.93 |
| 36.1 | 1.48 |
| 140.8 | 1.16 |
| Pipe wall thickness (mm) | Acoustic attenuation (dB/m) |
| 9.2 | 1.48 |
| 14.0 | 1.69 |
| 17.0 | 1.88 |
| Pipe wall elastic modulus (N/m2) | Acoustic attenuation (dB/m) |
| 1.48 | |
| 1.83 | |
| 2.44 | |
| Pipe wall Poisson’s ratio | Acoustic attenuation (dB/m) |
| 0.16 | 1.38 |
| 0.25 | 1.39 |
| 0.40 | 1.48 |
| Distance (m) | Average SNR (dB) | Standard Deviation (dB) |
|---|---|---|
| 3 | 37.4 | 0.3 |
| 5.6 | 25.2 | 0.3 |
| Soil Material | Density, R, (Mg/m3) | In Situ Acoustic Bulk Wave Speed (m/s) | Average Bulk Acoustic Wave Speed (m/s) | In Situ Acoustic Shear Wave Speed (m/s) | Bulk Modulus (N/m2) |
|---|---|---|---|---|---|
| Loose unsaturated sand | 1.5–1.8 | 185–450 | 317.5 | 100–250 | |
| Medium unsaturated sand | 1.7–2.1 | 325–650 | 487.5 | 200–350 | |
| Dense unsaturated sand | 1.9–2.2 | 550–1300 | 925.0 | 350–700 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farai, O.; Metje, N.; Anthony, C.; Chapman, D. Analysis of Acoustic Signal Propagation for Reliable Digital Communication along Exposed and Buried Water Pipes. Appl. Sci. 2023, 13, 4611. https://doi.org/10.3390/app13074611
Farai O, Metje N, Anthony C, Chapman D. Analysis of Acoustic Signal Propagation for Reliable Digital Communication along Exposed and Buried Water Pipes. Applied Sciences. 2023; 13(7):4611. https://doi.org/10.3390/app13074611
Chicago/Turabian StyleFarai, Omotayo, Nicole Metje, Carl Anthony, and David Chapman. 2023. "Analysis of Acoustic Signal Propagation for Reliable Digital Communication along Exposed and Buried Water Pipes" Applied Sciences 13, no. 7: 4611. https://doi.org/10.3390/app13074611