

Towards Mitigating Jellyfish Attacks Based on Honesty Metrics in V2X Autonomous Networks

Abstract
:1. Introduction
2. Jellyfish Attack Overview
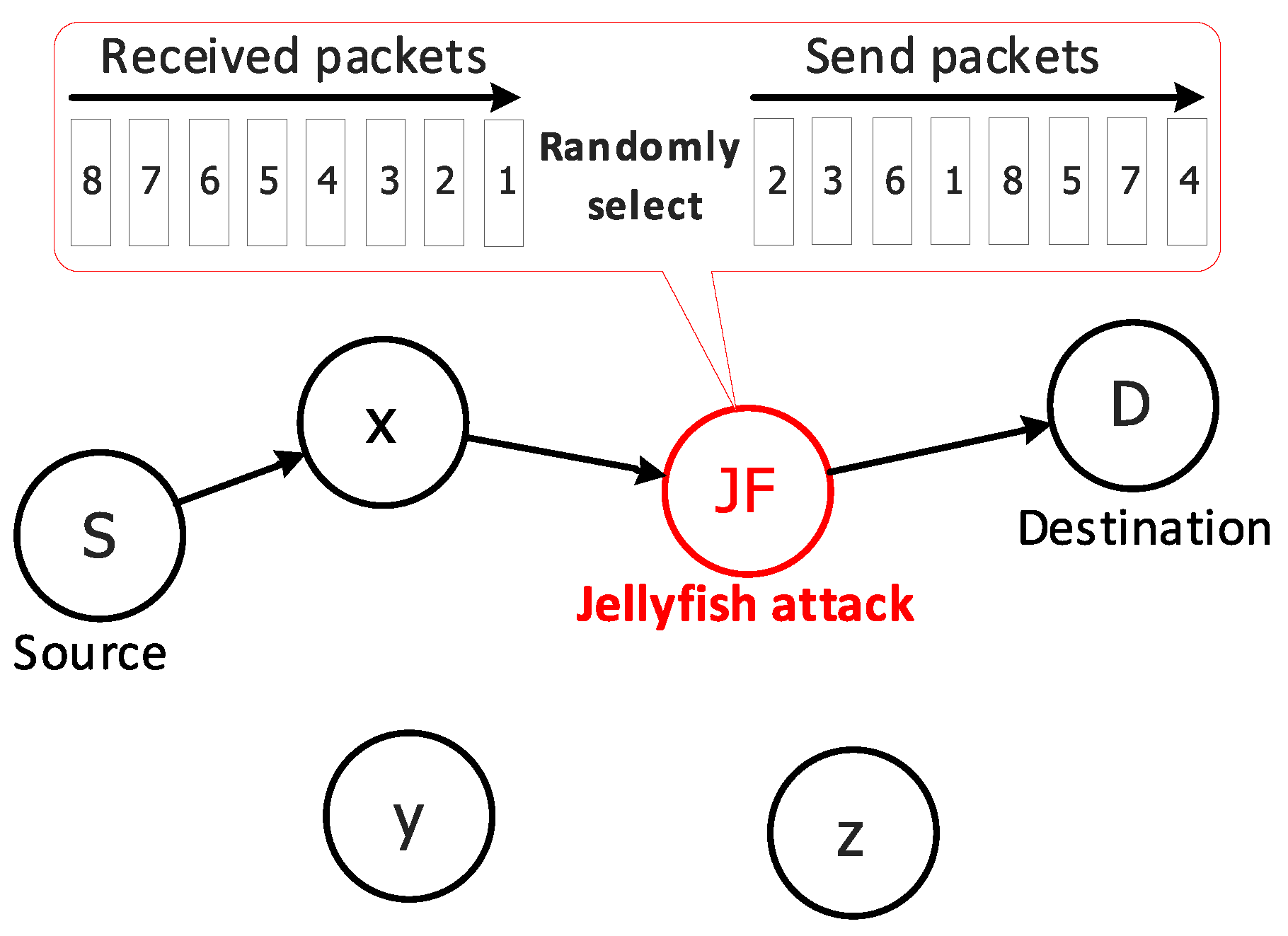
2.1. Jellyfish Reordering Attacks
2.2. Jellyfish Periodic Drop Attacks
2.3. Jellyfish Delay Variance Attacks
3. Related Literature
4. Secure and Efficient Routing Protocol for Jellyfish Attack Prevention in V2X (SecE-V2X)
4.1. Honesty Characteristics
- Only honest nodes can participate in the routing path.
- Source and destination nodes are considered honest nodes.
- Lack of symmetry: This can be defined as the lack of Honesty equivalence between nodes. If node U is honest to node V, it does not necessarily mean that node V is honest to node U.
- Transitive relation: The honest relationship between two nodes can be provided to other nodes as recommended confidence.
- Composite: The honest values collected from many possible paths can be combined to produce an integrated honest value.
4.2. Honesty Metrics
4.2.1. Packet Delay
4.2.2. Packet Loss Rate
4.2.3. Packet Reordering
4.3. Calculating the Node Honesty
4.3.1. Communication Confidence
4.3.2. Direct Confidence
4.3.3. Recommended Confidence
4.3.4. Overall Honesty
4.4. SecE-V2X Routing Algorithm
| Algorithm 1. Steps involved when calculating the Honesty value for the neighbor (N). |
| // The steps taken to calculate the neighbor Honesty value With the neighbor N do D←getDelay(N); // Getting the delay of the node N Sp←getSp(N); // Getting the number of successfully delivered packets of the node N Fp←getFp(N); // Getting the number of unsuccessfully delivered packets of the node N y←Sp+Fp+1; Cfrd←(2*Sp +1)/(2*y); // Calculating the forward packet confidence Cfct←1/y; // Calculating the factor of uncertainty confidence Ccom← (2*Cfrd+Cfct)/2 // Calculating the communication confidence PR←getPR(N); // Getting the packet reordering value of the node N if PR=0 then Cdirect← Wcom*Ccom+Wdelay/D // Calculating the direct confidence else Cdirect←0; end if Crcd←0; for all i in neighborsTable do Crcd←Crcd+getHovr(N)[i]; // Calculating the sum of Recommended confidences end for Crcd←Crcd/neighborsTable.length; // Calculating the average of the Recommended confidences Hovr←a*Cdirect+b*Crcd; // Calculating the overall honesty My-id ← getNodeId(); //Getting current node id Neighbor-id ← getNodeId(N); //Getting neighbor Node id MyPosition← getPosition(); // Getting current node position NPosition← getPosition(N); // Getting neighbor N position t ← now(); //Getting current time neighborsTable.upDateHonesty(Neighbor-id, NPosition, Hovr, t); //Updating neighborsTable sendHonestyBeacon (My-Id, MyPosition, Neighbor-id, Hovr, t); |
| Algorithm 2. Steps required when receiving an Honesty beacon message. |
| // The steps taken when receiving an Honesty beacon message extractHonestyBeacon(Id, Position, Neighbor-id, Neighbor-Honesty, Timestamp); //Extracting information from the beacon message setHovr(N)[Id]←Neighbor-Honesty; // Setting the honesty of the node N provided from the node Id Crcd←0; for all i in neighborsTable do Crcd←Crcd+getHovr(N)[i]; // Calculating the Recommended confidence by getting the honesty of the node N provided from the node i end for Hovr←a*Cdirect+b*Crcd; // Calculating the overall honesty neighborsTable.upDateHonesty(Neighbor-id, Neighbor-Position, Hovr, now()); //Updating node information in neighborsTable |
| Algorithm 3. The next-hop selection steps in the SecE-V2X protocol. |
| // The steps taken while deciding to deliver a data packet selfPosition ← getPosition(); // Getting current node position destinationId ← getNodeId(destination); // Getting the ID of the destination node destinationPosition ← getPosition(destination); // Getting the position of the destination node myDistance ← (destinationPosition–selfPosition).length(); //Calculate the distance between the current node and the destination if destinationId in neighborsTable then //Check if the destination in neighborsTable sendPacketTo(destinationId); //Sending the packet to the destination else bestHonesty ← 0; for all i in neighborsTable do neighborDistance ← (destinationPosition–neighborPosition).length(); // Calculate the distance between the neighbor node and the destination if (myDistance > neighborDistance) then if (neighborHonesty > bestHonesty) then // Choosing the neighbor with the best honesty bestHonesty ← neighborHonesty; bestNeighbor ← getNodeId(neighbor); end if end if end for if (bestHonesty > weightLevel) then //Check the weight level sendPacketTo (bestNeighbor); // Transferring the packet to the chosen next-hop node else chooseTwoBestNeighbors(bestNeighbor1, bestNeighbor2); // choosing the best-honesty pair of nodes sendPacketTo(bestNeighbor1); sendPacketTo(bestNeighbor2); end if end if |
5. Result Analysis and Performance Evaluation
5.1. Under Jellyfish Periodic Drop Attacks
5.1.1. Packet Delivery Ratio (PDR)
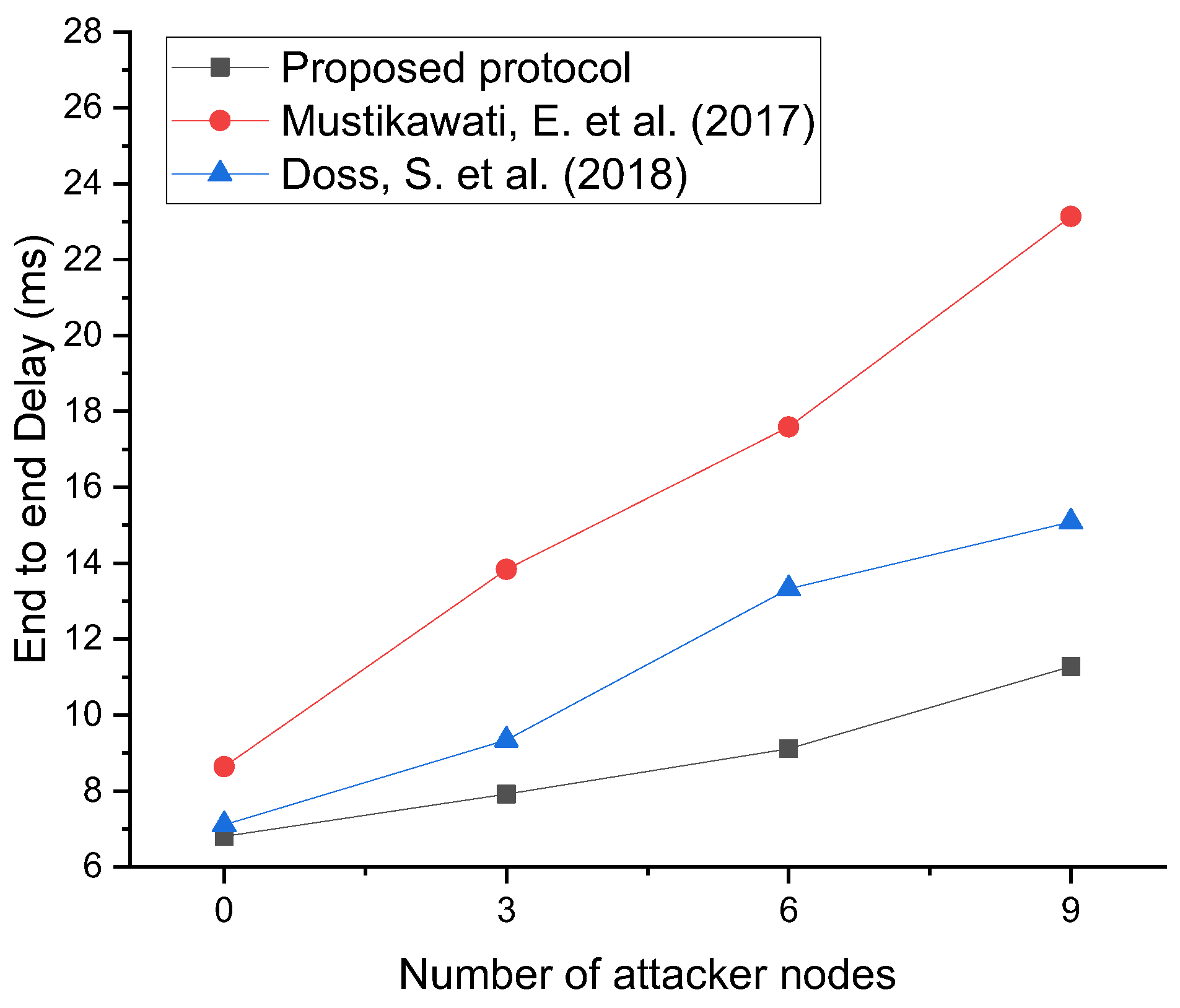
5.1.2. End-to-End Delay
5.1.3. Throughput
5.2. Under Jellyfish Delay Variance Attacks
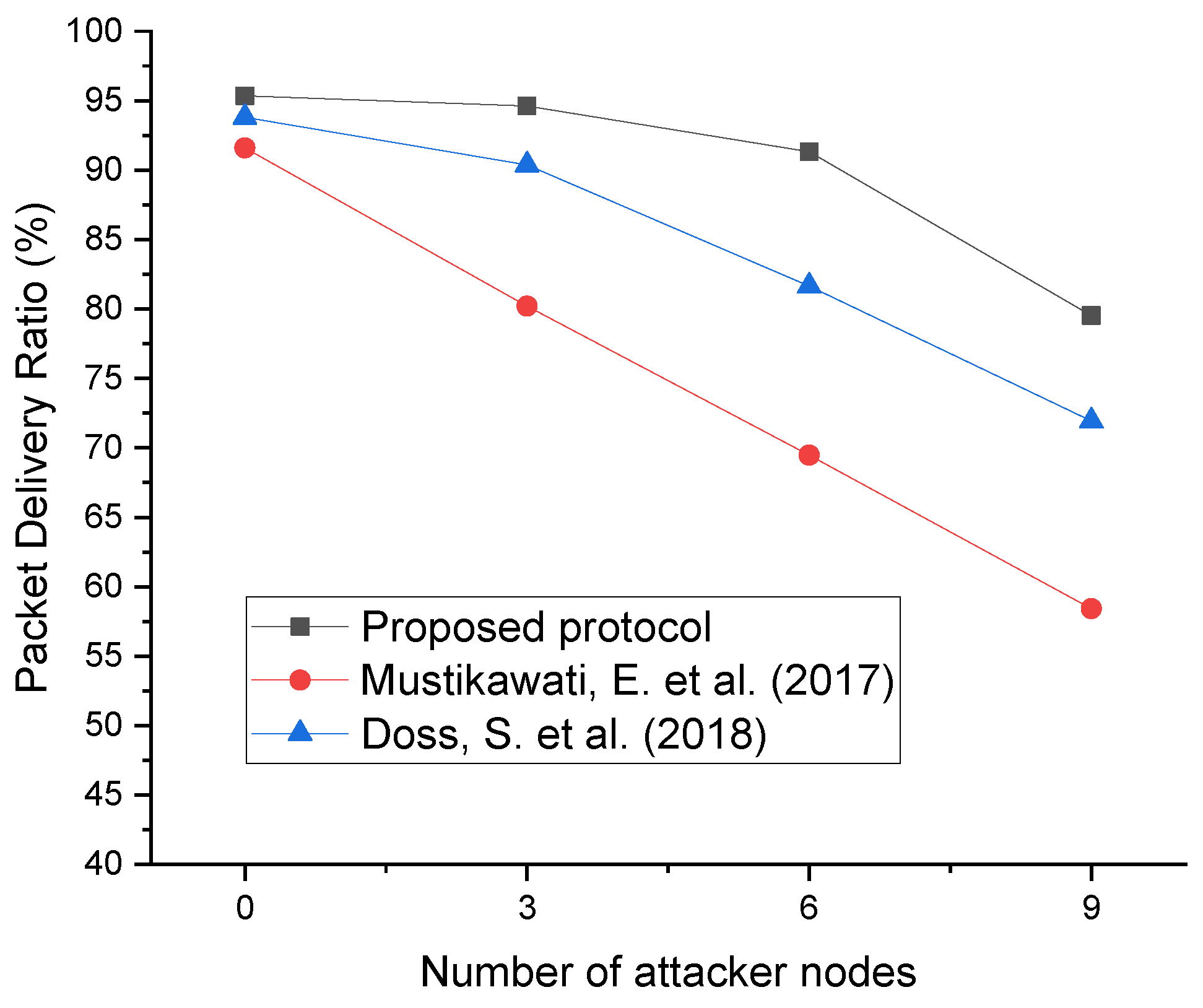
5.2.1. Packet Delivery Ratio (PDR)
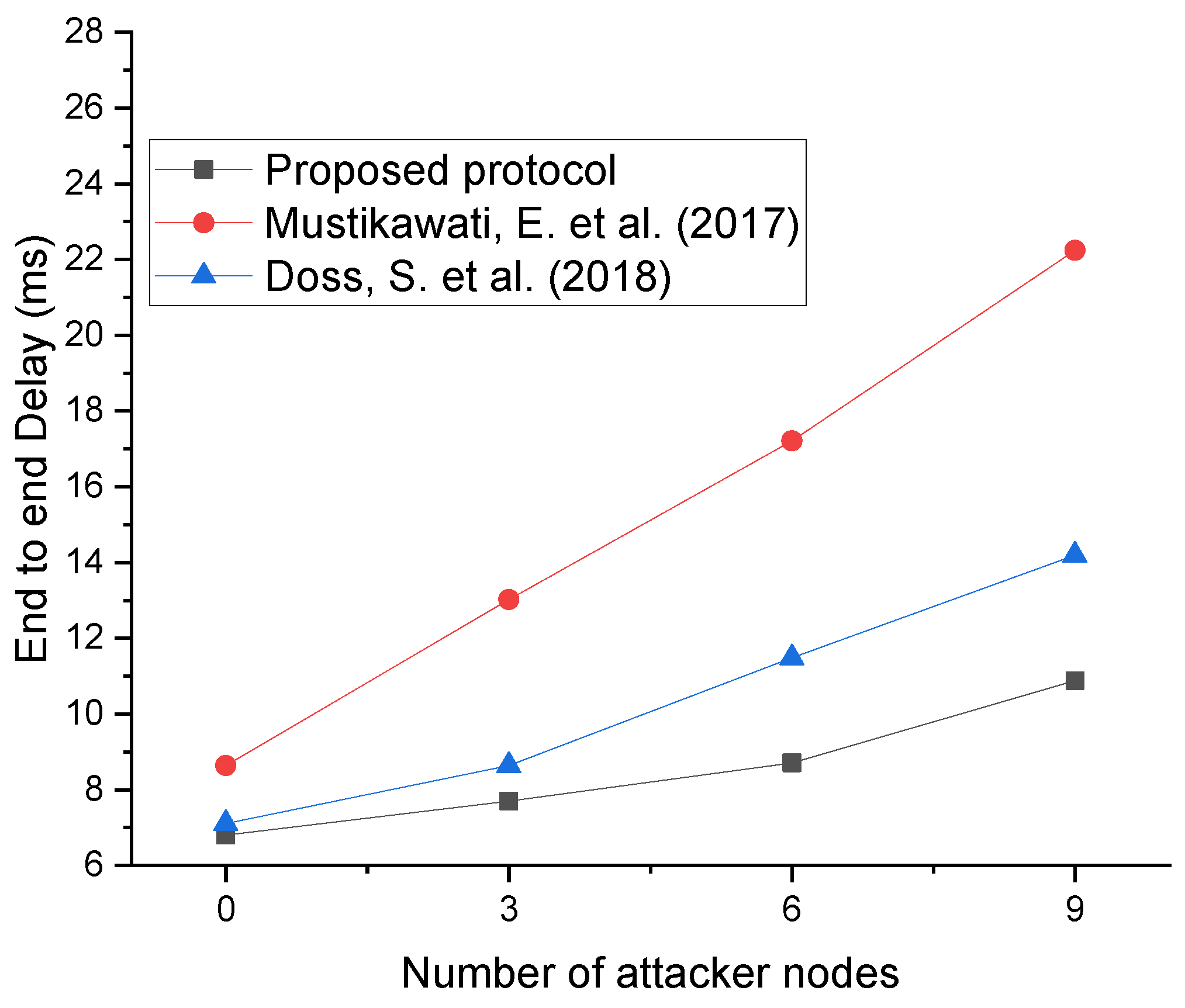
5.2.2. End-to-End Delay
5.2.3. Throughput
5.3. Under Jellyfish Reordering Attacks
5.3.1. Packet Delivery Ratio (PDR)
5.3.2. End-to-End Delay
5.3.3. Throughput
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronym | Description |
| ACKs | Acknowledgments |
| AODV | Ad hoc on-demand distance vector |
| DDoS | Distributed denial of service |
| DoS | Denial of service |
| DPR | Dropped packet ratio |
| DSR | Dynamic source routing |
| DSRC | Dedicated short-range communications |
| DTD | Direct trust-based detection |
| EED | End-to-end delay |
| FIFO | First in, first out |
| GPS | Geographic positioning system |
| GPSR | Greedy perimeter stateless routing protocol |
| IDS | Intrusion detection system |
| ITS | Intelligent transportation system |
| MANET | Mobile ad hoc networks |
| NRL | Normalized routing load |
| NS-2 | Network simulator 2 |
| OLSR | Optimized link state routing protocol |
| OMNET++ | Objective modular network testbed in C++ |
| PDR | Packet delivery ratio |
| QoS | Quality of service |
| RREP | Route reply |
| RREQ | Route request |
| RTO | Retransmission timeout |
| SUMO | Simulator for urban mobility |
| SVM | Support vector machine |
| TCP | Transmission control protocol |
| V2I | Vehicle-to-road infrastructure |
| V2V | Vehicle-to-vehicle |
| V2X | Vehicle-to-everything |
| VANETs | Vehicular ad hoc networks |
| Veins | Vehicles in network simulation |
References
- Osman, R.A.; Abdelsalam, A.K. A Novel Adaptive Approach for Autonomous Vehicle Based on Optimization Technique for Enhancing the Communication between Autonomous Vehicle-to-Everything through Cooperative Communication. Appl. Sci. 2021, 11, 9089. [Google Scholar] [CrossRef]
- Azzaoui, N.; Korichi, A.; Brik, B.; el amine Fekair, M.; Kerrache, C.A. Wireless Communication in Internet of Vehicles Networks: DSRC-Based Vs Cellular-Based. In Proceedings of the Proceedings of the 4th International Conference on Smart City Applications, Casablanca, Morocco, 2 October 2019; Association for Computing Machinery: New York, NY, USA; pp. 1–6. [Google Scholar]
- Azzaoui, N.; Korichi, A.; Brik, B.; el amine Fekair, M.; Kerrache, C.A. On the Communication Strategies in Heterogeneous Internet of Vehicles. In Proceedings of the Innovations in Smart Cities Applications, 3rd ed.; Ben Ahmed, M., Boudhir, A.A., Santos, D., El Aroussi, M., Karas, İ.R., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 783–795. [Google Scholar]
- Kiela, K.; Barzdenas, V.; Jurgo, M.; Macaitis, V.; Rafanavicius, J.; Vasjanov, A.; Kladovscikov, L.; Navickas, R. Review of V2X–IoT Standards and Frameworks for ITS Applications. Appl. Sci. 2020, 10, 4314. [Google Scholar] [CrossRef]
- Azzaoui, N.; Korichi, A.; Brik, B. A Reliable Data Forwarding Technique for 5G Internet of Vehicles Networks. In Innovative and Intelligent Technology-Based Services For Smart Environments–Smart Sensing and Artificial Intelligence; CRC Press: London, UK, 2021; pp. 142–148. [Google Scholar] [CrossRef]
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A Survey of Vehicle to Everything (V2X) Testing. Sensors 2019, 19, 334. [Google Scholar] [CrossRef] [Green Version]
- Seo, H.; Lee, K.-D.; Yasukawa, S.; Peng, Y.; Sartori, P. LTE Evolution for Vehicle-to-Everything Services. IEEE Commun. Mag. 2016, 54, 22–28. [Google Scholar] [CrossRef]
- Azzaoui, N.; Korichi, A.; Brik, B.; Amirat, H. A Survey on Data Dissemination in Internet of Vehicles Networks. J. Locat. Based Serv. 2022, 2022, 2151658. [Google Scholar] [CrossRef]
- Srivastava, A.; Prakash, A.; Tripathi, R. Location Based Routing Protocols in VANET: Issues and Existing Solutions. Veh. Commun. 2020, 23, 100231. [Google Scholar] [CrossRef]
- Karimi, R.; Shokrollahi, S. PGRP: Predictive Geographic Routing Protocol for VANETs. Comput. Netw. 2018, 141, 67–81. [Google Scholar] [CrossRef]
- Azzaoui, N.; Korichi, A.; Brik, B.; el A Fekair, M. Towards Optimal Dissemination of Emergency Messages in Internet of Vehicles: A Dynamic Clustering-Based Approach. Electronics 2021, 10, 979. [Google Scholar] [CrossRef]
- Karunakar, P.; Matta, J.; Singh, R.P.; Kumar, O.R. Analysis of Position Based Routing Vanet Protocols Using Ns2 Simulator. Int. J. Innov. Technol. Explor. Eng. (IJITEE) 2020, 9, 1105–1109. [Google Scholar]
- Arnous, R.; El-kenawy, E.; Saber, M. A Proposed Routing Protocol for Mobile Ad Hoc Networks. Int. J. Comput. Appl. 2019, 975, 8887. [Google Scholar] [CrossRef]
- Karp, B.; Kung, H.-T. GPSR: Greedy Perimeter Stateless Routing for Wireless Networks. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; pp. 243–254. [Google Scholar]
- Yang, X.; Li, M.; Qian, Z.; Di, T. Improvement of GPSR Protocol in Vehicular Ad Hoc Network. IEEE Access 2018, 6, 39515–39524. [Google Scholar] [CrossRef]
- Benguenane, M.; Korichi, A.; Azzaoui, N. Geographical Routing Protocols in VANets: Performance and Security Analysis. In Proceedings of the 2nd International Conference on Industry 4.0 and Artificial Intelligence (ICIAI 2021), Sousse, Tunisia, 28–30 November 2021; Atlantis Press: Dordrecht, The Netherlands, 2022; pp. 158–163. [Google Scholar]
- Nabwene, R.N. Review on Intelligent Internal Attacks Detection in VANET. In Proceedings of the 2018 4th Annual International Conference on Network and Information Systems for Computers (ICNISC), IEEE, Wuhan, China, 19–21 April 2018; pp. 1–6. [Google Scholar]
- Ali Alheeti, K.M.; Gruebler, A.; McDonald-Maier, K. Intelligent Intrusion Detection of Grey Hole and Rushing Attacks in Self-Driving Vehicular Networks. Computers 2016, 5, 16. [Google Scholar] [CrossRef] [Green Version]
- Younas, S.; Rehman, F.; Maqsood, T.; Mustafa, S.; Akhunzada, A.; Gani, A. Collaborative Detection of Black Hole and Gray Hole Attacks for Secure Data Communication in VANETs. Appl. Sci. 2022, 12, 12448. [Google Scholar] [CrossRef]
- Doss, S.; Nayyar, A.; Suseendran, G.; Tanwar, S.; Khanna, A.; Thong, P.H. APD-JFAD: Accurate Prevention and Detection of Jelly Fish Attack in MANET. IEEE Access 2018, 6, 56954–56965. [Google Scholar] [CrossRef]
- Aad, I.; Hubaux, J.-P.; Knightly, E.W. Denial of Service Resilience in Ad Hoc Networks. In Proceedings of the 10th Annual International Conference on Mobile Computing and Networking, Philadelphia, PA, USA, 26 September–1 October 2004; pp. 202–215. [Google Scholar]
- Aad, I.; Hubaux, J.-P.; Knightly, E.W. Impact of Denial of Service Attacks on Ad Hoc Networks. IEEE/ACM Trans. Netw. 2008, 16, 791–802. [Google Scholar] [CrossRef] [Green Version]
- Kumar, S.; Singh, M. Periodic Drop Attack in TCP-Mobile Ad-Hoc Network. DLINE: Chennai, India, 2018; p. 7. [Google Scholar]
- Thapar, S.; Sharma, S.K. Study of Direct Trust-Based Detection Algorithm for Prohibiting Jellyfish Attack in MANET. Ilkogr. Online 2021, 20, 2052–2057. [Google Scholar]
- Kumar, S.; Singh, M. Design and Efficient Network Investigation of Passive Periodic Drop Attack. Orient. J. Comput. Sci. Technol. 2021, 13, 110–116. [Google Scholar] [CrossRef]
- Deepika, D.; Saxena, S. Performance Evaluation of AODV with Self-Cooperative Trust Scheme Using Jellyfish Delay Variance Attack. In Proceedings of the 2018 Second International Conference on Intelligent Computing and Control Systems (ICICCS), IEEE, Madurai, India, 14–15 June 2018; pp. 1191–1196. [Google Scholar]
- Pathan, M.S.; Zhu, N.; He, J.; Zardari, Z.A.; Memon, M.Q.; Hussain, M.I. An Efficient Trust-Based Scheme for Secure and Quality of Service Routing in MANETs. Future Internet 2018, 10, 16. [Google Scholar] [CrossRef] [Green Version]
- Hasan, A.; Khan, M.A.; Shabir, B.; Munir, A.; Malik, A.W.; Anwar, Z.; Ahmad, J. Forensic Analysis of Blackhole Attack in Wireless Sensor Networks/Internet of Things. Appl. Sci. 2022, 12, 11442. [Google Scholar] [CrossRef]
- Swain, J.; Pattanayak, B.K.; Pati, B. A Systematic Study and Analysis of Security Issues in Mobile Ad-Hoc Networks. In Research Anthology on Securing Mobile Technologies and Applications; IGI Global: Hershey, PA, USA, 2021; pp. 144–150. [Google Scholar]
- Purohit, N.; Sinha, R.; Maurya, K. Simulation Study of Black Hole and Jellyfish Attack on MANET Using NS3. In Proceedings of the 2011 Nirma University International Conference on Engineering, Ahmedabad, India, 8–10 December 2011; pp. 1–5. [Google Scholar]
- Sachdeva, S.; Kaur, P. Detection and Analysis of Jellyfish Attack in MANETs. In Proceedings of the 2016 International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 26–27 August 2016; Volume 2, pp. 1–5. [Google Scholar]
- Patel, H.P.; Chaudhari, M.B. A Time Space Cryptography Hashing Solution for Prevention Jellyfish Reordering Attack in Wireless Adhoc Networks. In Proceedings of the 2013 Fourth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Tiruchengode, India, 4–6 July 2013; pp. 1–6. [Google Scholar]
- Boukerch, A.; Xu, L.; EL-Khatib, K. Trust-Based Security for Wireless Ad Hoc and Sensor Networks. Comput. Commun. 2007, 30, 2413–2427. [Google Scholar] [CrossRef]
- Poongodi, M.; Hamdi, M.; Sharma, A.; Ma, M.; Singh, P.K. DDoS Detection Mechanism Using Trust-Based Evaluation System in VANET. IEEE Access 2019, 7, 183532–183544. [Google Scholar] [CrossRef]
- Nandy, T.; Noor, R.M.; Idris, M.Y.I.B.; Bhattacharyya, S. T-BCIDS: Trust-Based Collaborative Intrusion Detection System for VANET. In Proceedings of the 2020 National Conference on Emerging Trends on Sustainable Technology and Engineering Applications (NCETSTEA), Durgapur, India, 7–8 February 2020; pp. 1–5. [Google Scholar]
- Adhikary, K.; Bhushan, S.; Kumar, S.; Dutta, K. Hybrid Algorithm to Detect DDoS Attacks in VANETs. Wirel. Pers. Commun. 2020, 114, 3613–3634. [Google Scholar] [CrossRef]
- Mustikawati, E.; Perdana, D.; Negara, R.M. Network Security Analysis in Vanet against Black Hole and Jellyfish Attack with Intrusion Detection System Algorithm. CommIT Commun. Inf. Technol. J. 2017, 11, 77–83. [Google Scholar] [CrossRef] [Green Version]
- Kaur, M.; Rani, M.; Nayyar, A. A Novel Defense Mechanism via Genetic Algorithm for Counterfeiting and Combating Jelly Fish Attack in Mobile Ad-Hoc Networks. In Proceedings of the 2014 5th International Conference-Confluence The Next Generation Information Technology Summit (Confluence), Noida, India, 25–26 September 2014; pp. 359–364. [Google Scholar]
- Thomas, A.; Sharma, V.K.; Singhal, G. Secure Link Establishment Method to Prevent Jelly Fish Attack in MANET. In Proceedings of the 2015 International Conference on Computational Intelligence and Communication Networks (CICN), Jabalpur, India, 12–14 December 2015; pp. 1153–1158. [Google Scholar]
- Soni, J.; Soni, A.; Shah, S.; Mathur, K.; Davv, I. Mitigation of Byzantine Attack in Manet. Int. J. Adv. Res. Comput. Eng. Technol. (IJARCET) 2017, 6, 1809–1815. [Google Scholar]
- Kumar, S.; Dutta, K.; Garg, A. FJADA: Friendship Based Jellyfish Attack Detection Algorithm for Mobile Ad Hoc Networks. Wirel. Pers. Commun. 2018, 101, 1901–1927. [Google Scholar] [CrossRef]
- Suseendran, G.; Chandrasekaran, E.; Nayyar, A. Defending Jellyfish Attack in Mobile Ad Hoc Networks via Novel Fuzzy System Rule. In Data Management, Analytics and Innovation; Springer: Berlin/Heidelberg, Germany, 2019; pp. 437–455. [Google Scholar]
- Satheeshkumar, S.; Sengottaiyan, N. Defending against Jellyfish Attacks Using Cluster Based Routing Protocol for Secured Data Transmission in MANET. Clust. Comput. 2019, 22, 10849–10860. [Google Scholar] [CrossRef]
- Reddy, G. A Delay Sensitive Multi-Path Selection to Prevent the Rushing Attack in VANET. In Proceedings of the 2021 5th International Conference on Information Systems and Computer Networks (ISCON), Mathura, India, 22–23 October 2021; pp. 1–7. [Google Scholar]
- Verma, A.; Saha, R.; Kumar, G.; Kim, T. The Security Perspectives of Vehicular Networks: A Taxonomical Analysis of Attacks and Solutions. Appl. Sci. 2021, 11, 4682. [Google Scholar] [CrossRef]
- Fonseca, E.; Festag, A. A Survey of Existing Approaches for Secure Ad Hoc Routing and Their Applicability to VANETS. NEC Netw. Lab. 2006, 28, 1–28. [Google Scholar]
- Zaimi, I.; Boushaba, A.; Squalli Houssaini, Z.; Oumsis, M. A Fuzzy Geographical Routing Approach to Support Real-Time Multimedia Transmission for Vehicular Ad Hoc Networks. Wirel. Netw. 2019, 25, 1289–1311. [Google Scholar] [CrossRef]
- Al-Ani, A.D.; Seitz, J. QoS-Aware Routing in Multi-Rate Ad Hoc Networks Based on Ant Colony Optimization. Netw. Protoc. Algorithms 2015, 7, 1–25. [Google Scholar] [CrossRef]
- Ye, B.; Jayasumana, A.P.; Piratla, N.M. On Monitoring of End-to-End Packet Reordering over the Internet. In Proceedings of the International conference on Networking and Services (ICNS’06), Silicon Valley, CA, USA, 16–18 July 2006; p. 3. [Google Scholar]
- Jayasumana, A.; Piratla, N.; Banka, T.; Bare, A.; Whitner, R. Improved Packet Reordering Metrics; Network Working Group, Colorado State University: Fort Collins, CO, USA, 2008. [Google Scholar]
- Zhang, D.; Gong, C.; Jiang, K.; Zhang, X.; Zhang, T. A Kind of New Method of Intelligent Trust Engineering Metrics (ITEM) for Application of Mobile Ad Hoc Network. Eng. Comput. 2020, 37, 1617–1643. [Google Scholar] [CrossRef]
- Eclipse SUMO—Simulation of Urban Mobility. Available online: https://www.eclipse.org/sumo/ (accessed on 21 June 2022).
- INET Framework—INET Framework. Available online: https://inet.omnetpp.org/ (accessed on 14 May 2022).
- Veins. Available online: https://veins.car2x.org/download/ (accessed on 28 May 2022).
- OMNeT++ Discrete Event Simulator. Available online: https://omnetpp.org/ (accessed on 16 April 2022).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Jellyfish Attack Subcategory | Aim | Impact |
|---|---|---|
| Reordering attack | Scrambling the packet order | Decreases throughput |
| Increases network congestion | ||
| Periodic drop attack | Discarding packets periodically | Data are lost in communication |
| Network throughput falls | ||
| Delay variance attack | Introduces delay before transmitting | Increase delay |
| Significant network congestion |
| Reference | Detection Strategy | Attack Covered | Network Type | Simulator | Performance Metrics | Approach Limitations |
|---|---|---|---|---|---|---|
| [32], 2013 | Hash function and time–space cryptography | Jellyfish reordering | Wireless ad hoc | Network simulator 2 (NS-2) | Congestion window, TCP goodput | The attacker node is not identified Not compared with existing methods More performance metrics are required |
| [38], 2014 | Genetic algorithm | Jellyfish periodic dropping | MANET | NS-2 | End-to-end delay, energy consumption, PDR, and throughput | The algorithm is not properly described The accuracy of detection is not mentioned Not compared with existing methods |
| [39], 2015 | Secure link establishment | Jellyfish reordering | MANET | ExataCyber | PDR, throughput, and end-to-end delay | The attacker node is not identified Not compared with existing methods |
| [31], 2016 | Time measure | Jellyfish delay variance | MANET | NS-2 | Throughput, end-to-end delay | Not compared with existing methods More performance metrics are required The accuracy of detection is not mentioned |
| [37], 2017 | Intrusion detection system | Blackhole and Jellyfish | VANET | NS-2 | PDR, throughput, and end-to-end delay | Not compared with existing methods The attacker node is not identified Evaluated only for the AODV protocol Only Jellyfish periodic dropping attacks are considered |
| [20], 2018 | Fusion of an authenticated routing-based framework and support vector machine | Jellyfish | MANET | NS-2 | Throughput, PDR, dropped packet ratio (DPR), and end-to-end delay | Not tested in the presence of attacks The accuracy of detection is not discussed Jellyfish reordering attacks are not considered |
| [41], 2018 | Direct trust-based detection | Jellyfish | MANET | MATLAB | Throughput, PDR, end-to-end delay, detection rate, false positive rate | The attacker node is not identified Not compared with existing methods |
| [26], 2018 | Trust scheme | Jellyfish delay variance | MANET | NS-2 | Throughput, end-to-end delay | The attacker node is not identified Not compared with existing methods More performance metrics are required |
| [34], 2019 | Trust-based evaluation | DDoS | VANET | NS-2 | PDR, latency, detection rate, and energy consumption | Computational overhead Compared with only one other approach |
| [42], 2019 | Genetic fuzzy-based rule system | Jellyfish | MANET | NS-2 | Throughput, PDR, DPR, and end-to-end delay | Not tested in the presence of attacks Computational overhead Only Jellyfish periodic dropping attacks are considered |
| [35], 2020 | Trust-based intrusion detection system | DDoS | VANET | / | / | No simulation or evaluation |
| [36],2020 | Machine learning | DDoS | VANET | RStudio | Accuracy, minimum error rate | Invalidated parametric evaluation Vehicle-to-vehicle (V2V) communication is not covered High storage requirements |
| [44], 2021 | Delay sensitive multipath selection | Rushing | VANET | / | / | No simulation or evaluation |
| SecE-V2X | Trust-based | Jellyfish | V2X | Objective modular network testbed in C++ (OMNET++) | PDR, end-to-end delay, and throughput | Needs to be validated on a realistic dataset |
| Node-Id | Position Information (x,y) | Overall-Honesty | Timestamp |
|---|---|---|---|
| 1 | 6218.79, 2363.39 | 0.75 | 22.75 |
| 2 | 6552.16, 2286.45 | 0.63 | 23.87 |
| 3 | 6536.72, 2181.74 | 0.86 | 23.42 |
| Parameter | Value |
|---|---|
| OMNET++ version | 5.2.6 |
| INET version | 4.2.2 |
| Veins version | 5.0 |
| Environment | Urban |
| SUMO version | 1.3.1 |
| Simulation area | 2500 m × 2500 m |
| Simulation time | 500 s |
| Number of nodes | 100 |
| Number of attackers | 0, 3, 6, and 9 |
| Max node speed | 14 m/s |
| Mobility model | Erlangen |
| MAC protocol | IEEE 802.11p |
| Transmission range | 250 m |
| Number of Attackers | Metrics | SecE-V2X | [20], 2018 | [37], 2017 |
|---|---|---|---|---|
| 0 | PDR (%) | 95.34 | 93.80 | 91.60 |
| EED (ms) | 6.80 | 7.11 | 8.64 | |
| Throughput (packets/s) | 638.15 | 596.33 | 534.55 | |
| 3 | PDR (%) | 93.21 | 88.76 | 79.63 |
| EED (ms) | 7.48 | 7.94 | 12.21 | |
| Throughput (packets/s) | 608.22 | 556.65 | 452.11 | |
| 6 | PDR (%) | 89.67 | 76.72 | 64.67 |
| EED (ms) | 8.31 | 9.64 | 16.83 | |
| Throughput (packets/s) | 551.29 | 460.54 | 346.86 | |
| 9 | PDR (%) | 76.83 | 69.75 | 55.29 |
| EED (ms) | 10.48 | 13.29 | 21.34 | |
| Throughput (packets/s) | 433.53 | 398.41 | 282.38 |
| Number of Attackers | Metrics | SecE-V2X | [20], 2018 | [37], 2017 |
|---|---|---|---|---|
| 0 | PDR (%) | 95.34 | 93.80 | 91.60 |
| EED (ms) | 6.80 | 7.11 | 8.64 | |
| Throughput (packets/s) | 638.15 | 596.33 | 534.55 | |
| 3 | PDR (%) | 94.62 | 90.38 | 80.20 |
| EED (ms) | 7.92 | 9.34 | 13.84 | |
| Throughput (packets/s) | 617.42 | 562.19 | 455.41 | |
| 6 | PDR (%) | 91.33 | 81.65 | 69.47 |
| EED (ms) | 9.11 | 13.33 | 17.59 | |
| Throughput (packets/s) | 560.75 | 483.62 | 383.34 | |
| 9 | PDR (%) | 79.53 | 71.93 | 58.42 |
| EED (ms) | 11.28 | 15.09 | 23.14 | |
| Throughput (packets/s) | 448.76 | 400.86 | 298.36 |
| Number of Attackers | Metrics | SecE-V2X | [20], 2018 | [37], 2017 |
|---|---|---|---|---|
| 0 | PDR (%) | 95.34 | 93.80 | 91.60 |
| EED (ms) | 6.80 | 7.11 | 8.64 | |
| Throughput (packets/s) | 638.15 | 596.33 | 534.55 | |
| 3 | PDR (%) | 93.92 | 89.57 | 79.92 |
| EED (ms) | 7.70 | 8.64 | 13.03 | |
| Throughput (packets/s) | 612.82 | 559.42 | 453.76 | |
| 6 | PDR (%) | 90.50 | 79.19 | 72.07 |
| EED (ms) | 8.71 | 11.49 | 17.21 | |
| Throughput (packets/s) | 556.02 | 472.08 | 402.10 | |
| 9 | PDR (%) | 78.18 | 74.84 | 56.86 |
| EED (ms) | 10.88 | 14.19 | 22.24 | |
| Throughput (packets/s) | 441.15 | 415.64 | 290.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benguenane, M.; Korichi, A.; Brik, B.; Azzaoui, N. Towards Mitigating Jellyfish Attacks Based on Honesty Metrics in V2X Autonomous Networks. Appl. Sci. 2023, 13, 4591. https://doi.org/10.3390/app13074591
Benguenane M, Korichi A, Brik B, Azzaoui N. Towards Mitigating Jellyfish Attacks Based on Honesty Metrics in V2X Autonomous Networks. Applied Sciences. 2023; 13(7):4591. https://doi.org/10.3390/app13074591
Chicago/Turabian StyleBenguenane, Messaoud, Ahmed Korichi, Bouziane Brik, and Nadjet Azzaoui. 2023. "Towards Mitigating Jellyfish Attacks Based on Honesty Metrics in V2X Autonomous Networks" Applied Sciences 13, no. 7: 4591. https://doi.org/10.3390/app13074591