
Artificial Neural Networks for Navigation Systems: A Review of Recent Research



Abstract
:1. Introduction
2. The Use of Neural Networks in the Global Positioning System
2.1. GDOP Approximation and Classification
2.2. Processing for Navigation States for GPS Receivers
2.3. Attitude Determination Using NN
2.4. Prediction of DGPS Differential Correction Using NN
3. Navigation Integration Using the State Estimators
4. Navigation Integration Enhanced by the ANN
4.1. Intelligent Estimator Using an NN as a Replacement of KF for Data Fusion
4.2. Hybrid Methods
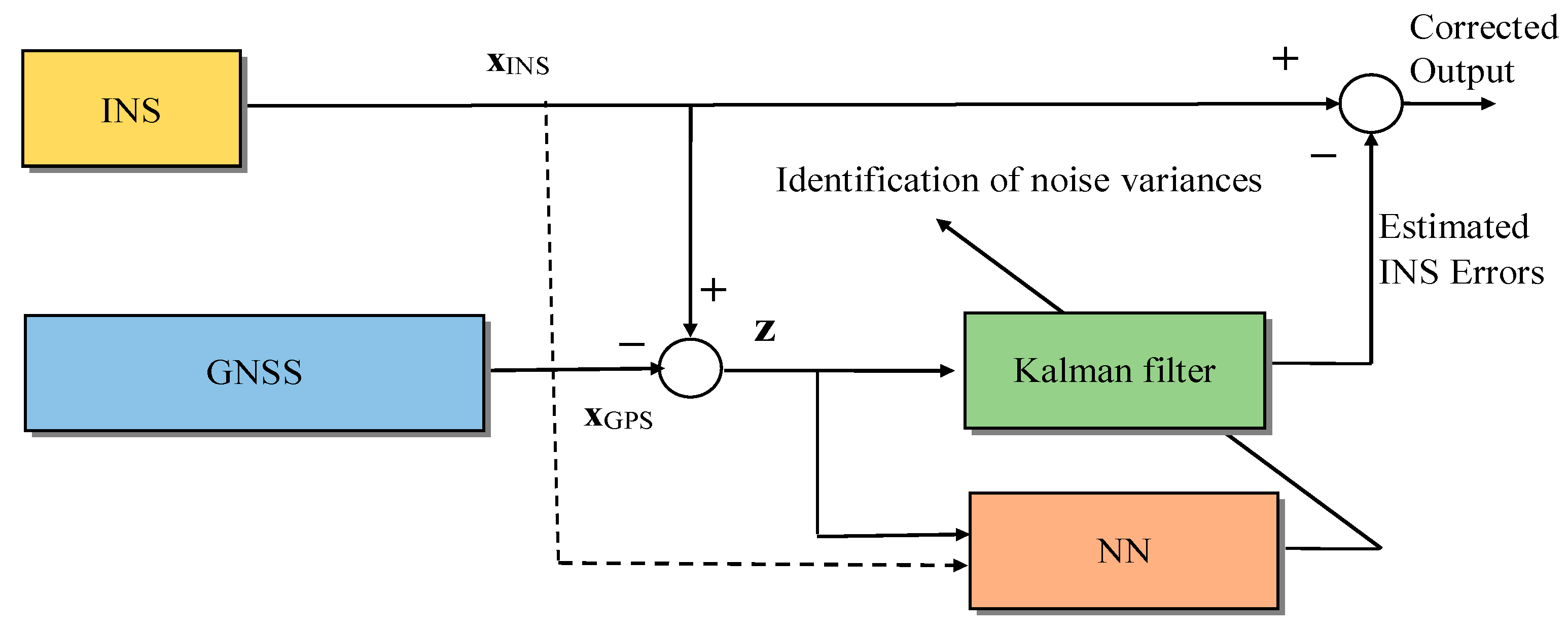
4.2.1. Prediction of Adaptive Factors for Gain Scaling or Tuning
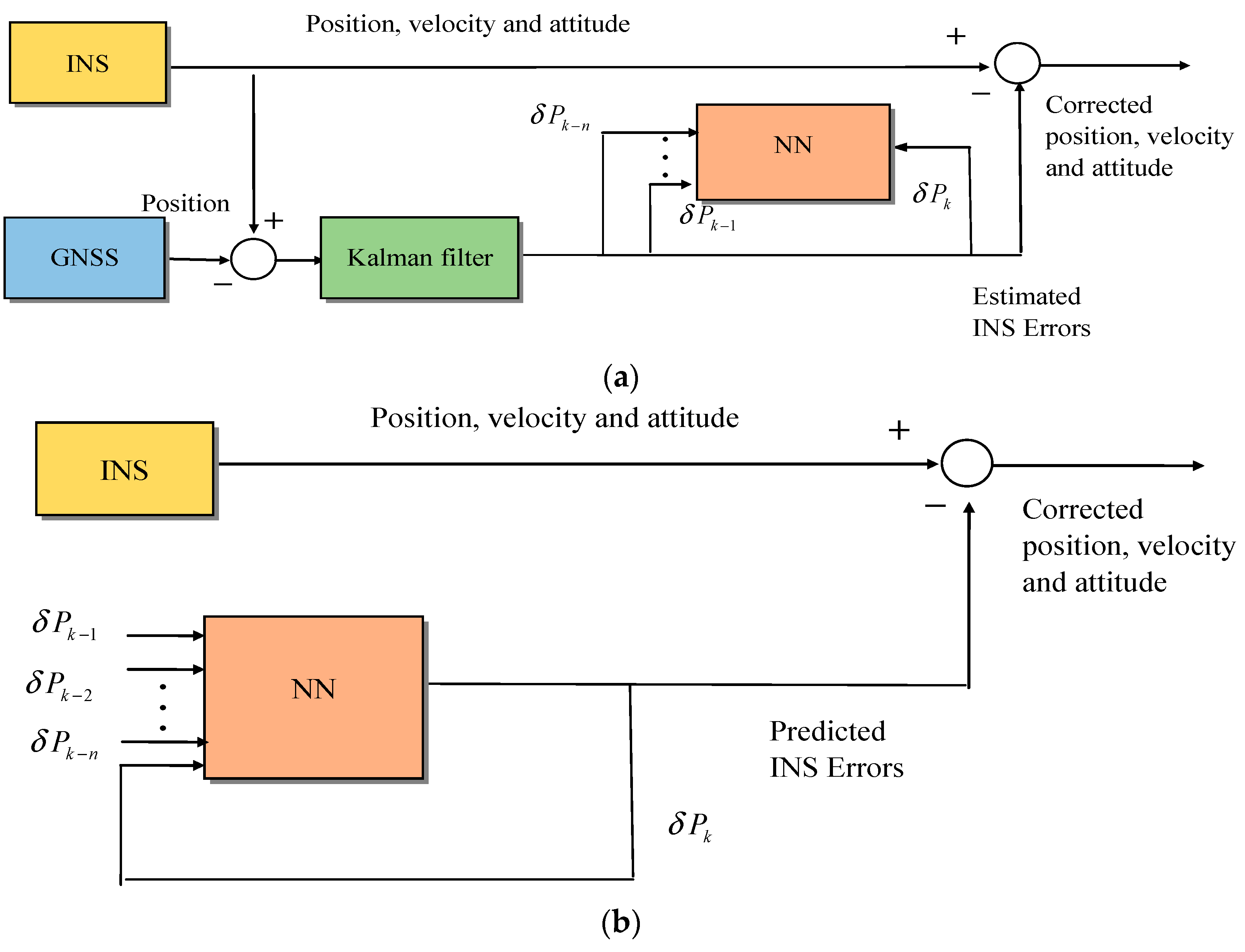
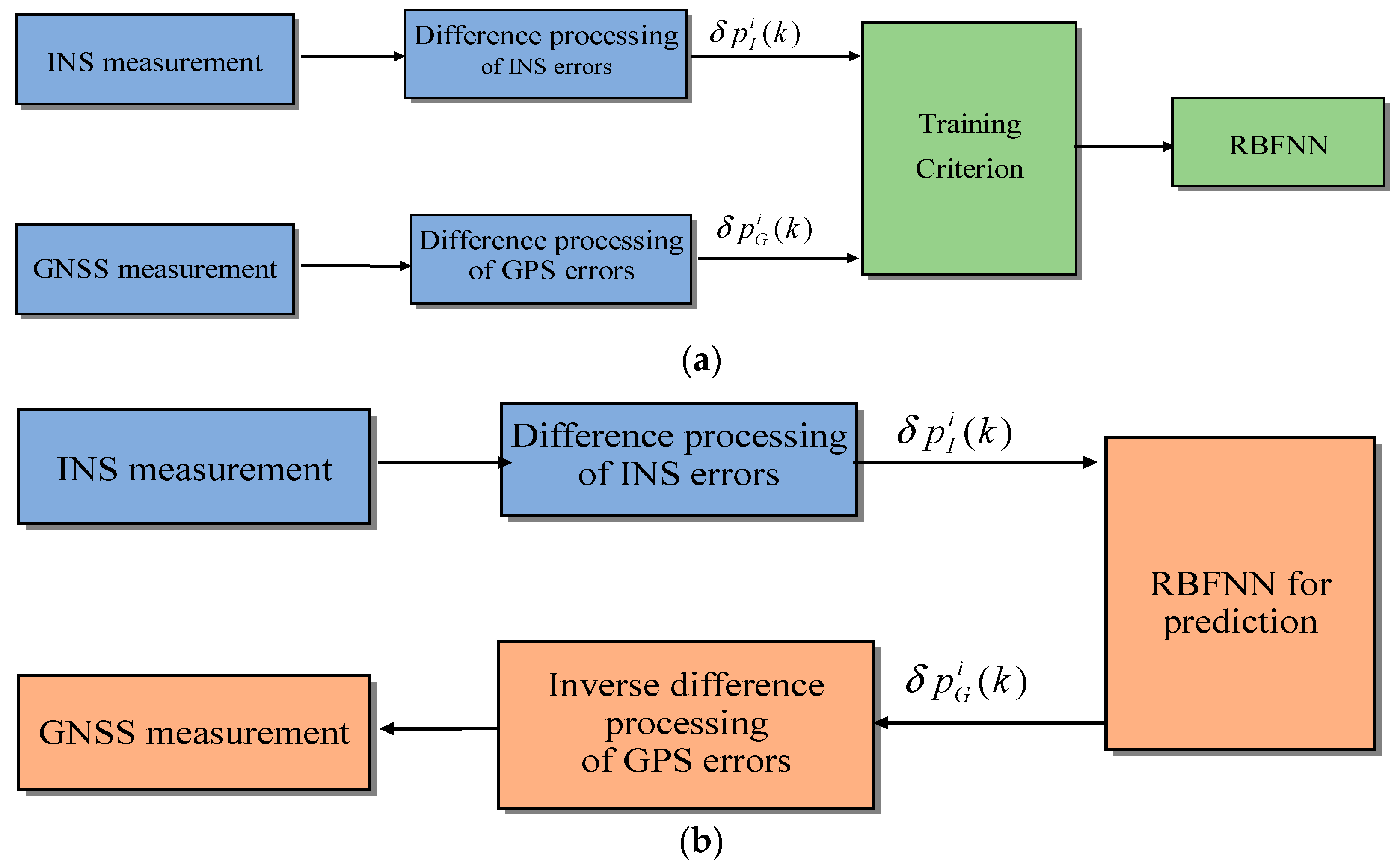
4.2.2. NN as the INS Errors Predictor for Error Compensation
4.2.3. Measurement Reconfiguration Based on NN
- I.
- During a GPS failure, the suggested model can effectively estimate the location increment and make up for the accumulation of INS errors.
- II.
- When the GPS measurements are absent, the advantage of a current design on localization becomes increasingly pronounced with time.
- III.
- The BPNN framework can adequately optimize both precision and computational burden by employing inputs for the past and present two-step data.
4.3. More Recent Development of NNs for Navigation System Designs
4.3.1. Nonlinear Autoregressive Exogenous Neural Network
4.3.2. Long Short-Term Memory (LSTM) NN
4.3.3. Extreme Learning Machine (ELM) NN
4.3.4. Gated Recurrent Unit (GRU) NN
4.3.5. Convolutional Neural Network (CNN) with GRU
5. Advantage and Disadvantages of ANN in Navigation System
6. Future Challenges
- ➢
- The flexibility of neural networks to consistently modify their structure to the application can be linked to its significance for GPS/INS incorporation.
- ➢
- However, for selecting an appropriate window size for real-time, practical applications requires considerable effort. Additionally, the efficiency of the approach is highly dependent on the vehicle’s state of movement and can be regained by using an ANN.
- ➢
- The CNNs particular models are designed to take two-dimensional input data, including images or time series data. The linear regression procedure known as “convolution” is always included in at least one layer of the network and can be the source of the term for these topologies.
- ➢
- The NNs that can be used to build waveforms for segments with curves differ from those that can be used for sequences with major roadways; this information may be obtained by subtracting the road curvature from the steering angle.
- ➢
- A variety of neural networks and other machine learning techniques can be chosen to enhance the proposed model’s hidden layer and transfer function counts as well as the number of invisible neurons and parameters.
- ➢
- By adding approaches that can offer a priori knowledge about the level of chaos of the time series, the recommended framework will perform better when choosing between adaptive, optimum, and robust estimators. When these strategies are paired with parallel computing activities, they might be able to train the methodology more effectively for longer prediction horizons.
- ➢
- Displacements can grow to be impossibly large or incredibly small when they are accumulated over a long period. Expanding gradients can be shortened or compressed, making them simpler to solve. On the other hand, collapsing gradients may become too small for computers to express and for networks to learn from them with more efficiency.
- ➢
- The vehicle’s movement depends on the capabilities of the vehicle and the layout of the route; an NN trained with measured data with a straight or curved road segment can provide a good location.
- ➢
- Future research should enhance the series of twisting roads for practice and modify the initial input values of the ANN model to address the issues.
- ➢
- Deep learning is a breakthrough in inertial navigation technology and can acquire more stability by using the trending ML technology.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wellenhof, B.H.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems, GPS, GLONASS, Galileo, and More; Springer Wien: Vienna, Austria; New York, NY, USA, 2008. [Google Scholar]
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering; John Wiley & Sons: New York, NY, USA, 1997. [Google Scholar]
- Mehra, R.K. On-line Identification of Linear Dynamic Systems with Applications to Kalman Filtering. IEEE Trans. Autom. Control 1970, 16, 12–21. [Google Scholar] [CrossRef]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman Filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Li, X.R.; Shalom, Y.B. Design of an Interacting Multiple Model Algorithm for Air Traffic Control Tracking. IEEE Trans. Control. Syst. Technol. 1993, 1, 186–194. [Google Scholar] [CrossRef]
- Lin, X.; Kirubarajan, T.; Bar-Shalom, Y.; Li, X. Enhanced Accuracy GPS Navigation Using the Interacting Multiple Model Estimator. In Proceedings of the IEEE Aerospace Conference, Montana, CA, USA, 10–17 March 2001; Volume 4, pp. 1911–1923. [Google Scholar]
- Chen, G.; Harigae, M. Using IMM Adaptive Estimator in GPS Positioning. In Proceedings of the 40th SICE Annual Conference, SICE 2001, International Session Papers, Nagoya, Japan, 25–27 July 2001; pp. 25–27. [Google Scholar]
- Jwo, D.J.; Chung, F.C.; Yu, K.L. GPS/INS Integration Accuracy Enhancement Using the Interacting Multiple Model Nonlinear Filters. J. Appl. Res. Technol. 2013, 11, 496–509. [Google Scholar] [CrossRef] [Green Version]
- Särkkä, S.; Nummenmaa, A. Recursive noise adaptive Kalman filtering by variational Bayesian approximations. IEEE Trans. Autom. Control 2009, 54, 596–600. [Google Scholar] [CrossRef]
- Li, K.; Chang, L.; Hu, B. A variational Bayesian-based unscented Kalman filter with both adaptivity and robustness. IEEE Sens. J. 2016, 16, 6966–6976. [Google Scholar] [CrossRef]
- Yun, P.; Wu, P.; He, S. An IMM-VB Algorithm for Hypersonic Vehicle Tracking with Heavy Tailed Measurement Noise. In Proceedings of the 2018 International Conference on Control, Automation and Information Sciences (ICCAIS), Hangzhou, China, 24–27 October 2018; pp. 169–174. [Google Scholar]
- Zhang, C.; Guo, C.; Zhang, D. Data fusion based on adaptive interacting multiple model for GPS/INS integrated navigation system. Appl. Sci. 2018, 8, 1682. [Google Scholar] [CrossRef] [Green Version]
- Simon, D.; Sherief, H.E. Navigation Satellite Selection using Neural Networks. Neurocomputing 1995, 7, 247–258. [Google Scholar] [CrossRef] [Green Version]
- Ham, D.; Park, H.; Hwang, S.; Kim, K. Neuromorphic electronics based on copying and pasting the brain. Nat. Electron. 2021, 4, 635–644. [Google Scholar] [CrossRef]
- Deng, W.; Liu, H.; Xu, J.; Zhao, H.; Song, Y. An improved quantum-inspired differential evolution algorithm for deep belief network. IEEE Trans. Instrum. Meas. 2020, 69, 7319–7327. [Google Scholar] [CrossRef]
- Ren, Z.; Zhen, X.; Jiang, Z.; Gao, Z.; Li, Y.; Shi, W. Underactuated control and analysis of single blade installation using a jackup installation vessel and active tugger line force control. Mar. Struct. 2023, 88, 103338. [Google Scholar] [CrossRef]
- Zhao, H.; Yang, X.; Chen, B.; Chen, H.; Deng, W. Bearing fault diagnosis using transfer learning and optimized deep belief network. Meas. Sci. Technol. 2022, 33, 065009. [Google Scholar] [CrossRef]
- Jwo, D.J.; Chin, K.P. Applying Back-propagation Neural Networks to GDOP Approximation. J. Navig. 2002, 54, 97–108. [Google Scholar] [CrossRef] [Green Version]
- Jwo, D.J.; Lai, C.C. Neural Network-Based Geometry, Classification for Navigation Satellite Selection. J. Navig. 2003, 56, 291–304. [Google Scholar] [CrossRef]
- Jwo, D.J.; Lai, C.C. Neural Network-based GPS GDOP Approximation and Classification. GPS Solut. 2007, 11, 51–60. [Google Scholar] [CrossRef]
- Mosavi, M.R.; Sorkhi, M. An Efficient Method for Optimum Selection of GPS Satellites Set using Recurrent Neural Network. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 245–249. [Google Scholar]
- Mosavi, M.R.; Azami, H. Applying Neural Network Ensembles for Clustering of GPS Satellites. Int. J. Geoinformatics 2011, 7, 7–14. [Google Scholar]
- Tafazoli, S.; Mosavi, M.R. Performance Improvement of GPS GDOP Approximation Using Recurrent Wavelet Neural Network. J. Geogr. Inf. Syst. 2011, 3, 318–322. [Google Scholar] [CrossRef] [Green Version]
- Azami, H.; Mosavi, M.R.; Sanei, S. Classification of GPS Satellites Using Improved Back Propagation Training Algorithms. Wirel. Pers. Commun. 2013, 71, 789–803. [Google Scholar] [CrossRef] [Green Version]
- Zarei, N. Artificial Intelligence Approaches for GPS GDOP Classification. Int. J. Comput. Appl. 2014, 96, 16–21. [Google Scholar] [CrossRef]
- Azarbad, M.; Azami, H.; Sanei, S.; Ebrahimzadeh, A. New Neural Network-based Approaches for GPS GDOP Classification based on Adaptive Neuro-Fuzzy Inference System, Radial Basis Function, and Improved Bee Algorithm. Appl. Soft Comput. 2014, 25, 285–292. [Google Scholar] [CrossRef]
- Chansarkar, M. Neural Networks in GPS Navigation. GPS Solut. 2000, 4, 14–18. [Google Scholar] [CrossRef]
- Mosavi, M.R. A Practical Approach for Accurate Positioning with L1 GPS Receivers using Neural Networks. Int. J. Intell. Fuzzy Syst. 2006, 17, 159–171. [Google Scholar]
- Mosavi, M.R. Precise Real-Time Positioning with a Low Cost GPS Engine using Neural Networks. Int. J. Surv. Rev. 2007, 39, 316–327. [Google Scholar] [CrossRef]
- Jwo, D.J.; Pai, C.-F. Incorporation of Neural Network State Estimator for GPS Attitude Determination. J. Navig. 2004, 57, 117–134. [Google Scholar] [CrossRef] [Green Version]
- Jwo, D.J. GPS Navigation Solutions by Analogue Neural Network Least-Squares Processors. J. Navig. 2005, 58, 105–118. [Google Scholar] [CrossRef] [Green Version]
- Jwo, D.J. Outlier Resistance Estimator for GPS Positioning—The Neural Network Approach. J. Navig. 2007, 60, 129–145. [Google Scholar] [CrossRef] [Green Version]
- Jwo, D.J.; Lee, T.-S.; Tseng, Y.-W. ARMA Neural Networks for Predicting DGPS Pseudorange Correction. J. Navig. 2004, 57, 275–286. [Google Scholar] [CrossRef] [Green Version]
- Julier, S.J.; Uhlmann, J.K.; Durrant-whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 5, 477–482. [Google Scholar] [CrossRef] [Green Version]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Arulampalam, M.S.; Maksell, S.; Gordon, N.; Clapp, T. A tutorial of particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Wan, E.A.; Van der Merwe, R. The Unscented Kalman Filter for Nonlinear Estimation. In Proceedings of the IEEE Symposium 2000 (AS-SPCC), Lake Louise, AB, Canada, 1–4 October 2000; pp. 153–158. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Benkouider, S.; Lagraa, N.; Yagoubi, M.B.; Lakas, A. Reducing Complexity of GPS/INS Integration Scheme through Neural Networks. In Proceedings of the 2013 9th International Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; pp. 53–58. [Google Scholar]
- Wang, C.-Z.; Kong, L.-W.; Jiang, J.; Lai, Y.-C. Machine learning-based approach to GPS anti jamming. GPS Solut. 2021, 25, 115. [Google Scholar] [CrossRef]
- Krzykowska, K.; Krzykowski, M. Forecasting Parameters of Satellite Navigation Signal through Artificial Neural Networks for the Purpose of Civil Aviation. Int. J. Aerosp. Eng. 2019, 2019, 7632958. [Google Scholar] [CrossRef]
- Khan, I.U.; Ali, T.; Farid, Z.; Scavino, E.; Rahman, M.A.A.; Hamdi, M.; Qiao, G. An improved hybrid indoor positioning system based on surface tessellation artificial neural network. Meas. Control 2020, 53, 1968–1977. [Google Scholar] [CrossRef]
- Kaygisiz, B.H.; Erkmen, I.; Erkmen, A.M. GPS/INS Enhancement for Land Navigation using Neural Network. J. Navig. 2004, 57, 297–310. [Google Scholar] [CrossRef]
- Gingras, D. An Overview of Positioning and Data Fusion Techniques Applied to Land Vehicle Navigation Systems. In Automotive Informatics and Communicative Systems: Principles in Vehicular Networks and Data Exchange; IGI Global: Hershey, PA, USA, 2009; pp. 219–246. [Google Scholar]
- Aftatah, M.; Lahrech, A.; Abdelouahed, A.; Soulhi, A. GPS/INS/Odometer Data Fusion for Land Vehicle Localization in GPS Denied Environment. Mod. Appl. Sci. 2017, 11, 62. [Google Scholar] [CrossRef]
- Du, S.; Zhang, S.; Gan, X. A hybrid fusion strategy for the land vehicle navigation using MEMS INS, odometer and GNSS. IEEE Access 2020, 8, 152512–152522. [Google Scholar] [CrossRef]
- Chen, Y.; Zhou, P.; Sheng, M.; Liu, K. Overview of the Integrated Navigation System Research Status and its Development Integrated with 5G Communication. In Proceedings of the 7th International Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS 2022), Wuhan, China, 18–19 March 2022; Volume XLVI-3/W1-2022, pp. 29–35. [Google Scholar]
- Wei, W.; Tan, L.; Jin, G.; Lu, L.; Sun, C. A Survey of UAV Visual Navigation Based on Monocular SLAM. In Proceedings of the 2018 IEEE 4th Information Technology and Mechatronics Engineering Conference (ITOEC 2018), Chongqing, China, 14–16 December 2018; pp. 1849–1853. [Google Scholar]
- Li, P.; Zhang, X.; Xu, X. Novel Terrain Integrated Navigation System Using Neural Network Aided Kalman Filter. In Proceedings of the Sixth International Conference on Natural Computation (ICNC), Yantai, China, 10–12 August 2010; pp. 445–448. [Google Scholar]
- Bao, J.; Li, D.; Qiao, X.; Rauschenbach, T. Integrated navigation for autonomous underwater vehicles in aquaculture: A review. Inf. Process. Agric. 2020, 7, 139–151. [Google Scholar] [CrossRef]
- Zhang, X.; Mu, X.; Liu, H.; He, B.; Yan, T. Application of Modified EKF Based on Intelligent Data Fusion in AUV Navigation; IEEE Underwater Technology (UT): Kaohsiung, Taiwan, 2019. [Google Scholar]
- Shafie, A.E.; Noureldin, A. Sensor Integration for Satellite-Based Sensor Navigation Utilizing Neural Networks. IEEE Trans. Neural Netw. 2007, 18, 589–594. [Google Scholar]
- Noureldin, A.; Shafie, A.E.; Bayoumi, M. GPS/INS Integration Utilizing Dynamic Neural Networks for Vehicular Navigation. Inf. Fusion 2011, 12, 48–57. [Google Scholar] [CrossRef]
- Chen, L.; Fang, J. A hybrid prediction method for bridging GPS outages in high-precision POS application. IEEE Trans. Instrum. Meas. 2014, 63, 1656–1665. [Google Scholar] [CrossRef]
- Chiang, K.W.; Huang, Y.W. An intelligent navigator for seamless INS/GPS integrated land vehicle navigation applications. Appl. Soft Comput. 2008, 8, 722–733. [Google Scholar] [CrossRef]
- Chiang, K.W.; Noureldin, A.; El-Sheimy, N. Constructive neural-networks-based MEMS/GPS integration scheme. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 582–594. [Google Scholar] [CrossRef]
- Jwo, D.J.; Chang, C.-S.; Lin, C.-H. Neural Network Aided Adaptive Kalman Filtering for GPS Applications. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, 10–13 October 2004; pp. 3686–3691. [Google Scholar]
- Jwo, D.J.; Huang, H.-C. Neural Network Aided Adaptive Extended Kalman Filtering Approach for DGPS Positioning. J. Navig. 2004, 57, 449–463. [Google Scholar] [CrossRef] [Green Version]
- Jwo, D.J.; Chen, J.J. GPS/INS navigation filter designs using neural network with optimization techniques. In Proceedings of the Advances in Natural Computation: Second International Conference, ICNC 2006, Xi’an, China, 24–28 September 2006; pp. 461–470. [Google Scholar]
- Wang, J.J.; Ding, W.; Wang, J. Improving Adaptive Kalman Filter in GPS/SDINS Integration with Neural Network. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007; pp. 571–578. [Google Scholar]
- Wang, J.J.; Wang, J.; Sinclair, D.; Watts, L. Neural Network Aided Kalman Filtering for Integrated GPS/INS Geo-Referencing Platform. In Proceedings of the 5th International Symposium on Mobile Mapping Technology, Padua, Italy, 29–31 May 2007; pp. 1–6. [Google Scholar]
- Ibrahim, F.; Tascillo, A.; Holou, N.A. DGPS/INS Integration Using Neural Network Methodology. In Proceedings of the 12th IEEE Internationals Conference on Tools with Artificial Intelligence, ICTAI 2000, Vancouver, BC, Canada, 15 November 2000; pp. 114–121. [Google Scholar]
- Pukhov, E.; Cohen, H.I. Novel Approach to Improve Performance of Inertial Navigation System Via Neural Network. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 746–756. [Google Scholar]
- Brossard, M.; Barrau, A.; Bonnabel, S. AI-IMU Dead-reckoning. IEEE Trans. Intell. Veh. 2020, 5, 585–595. [Google Scholar] [CrossRef]
- Filho, E.A.M.; Neto, A.R.; Kuga, H.K. A Low Cost INS/GPS Navigation System Integrated with a Multilayer Feed Forward Neural Network. J. Aerosp. Eng. Sci. Appl. 2010, 2, 26–36. [Google Scholar]
- Wang, G.; Xu, X.; Yao, Y.; Tong, J. A novel BPNN-based method to overcome the GPS outages for INS/GPS system. IEEE Access 2019, 7, 82134–82143. [Google Scholar] [CrossRef]
- Liu, Y.; Kong, Z.; Wang, L. The Vehicle Location Method Based on Artificial Neural Networks. In Proceedings of the International Conference on Manufacturing Science and Engineering (ICMSE), Guangzhou, China, 28–29 November 2015; pp. 1642–1646. [Google Scholar]
- Guo, H. Neural Network Aided Kalman Filtering for Integrated GPS/INS Navigation System. Telkomnika 2013, 11, 1221–1226. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, B. A Low-Cost GPS/INS Integration Based on UKF and BP Neural Network. In Proceedings of the Fifth International Conference on Intelligent Control and Information Processing, Dalian, China, 26–28 July 2014; pp. 100–107. [Google Scholar]
- Zhou, Y.; Wan, J.; Li, Z.; Song, Z. GPS/INS Integrated Navigation with BP Neural Network and Kalman Filter. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau SAR, China, 5–8 December 2017; pp. 2515–2520. [Google Scholar]
- Zhang, Z.; Wu, F.; Liu, Y.; Zuo, Y.; Ji, Y. A Neural Network Aided Integrated Navigation Algorithm Based on Vehicle Motion Mode Information. In Proceedings of the 2019 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Dalian, China, 20–23 September 2019. [Google Scholar]
- Li, S.; Cai, C. Research on Strong Tracking UKF Algorithm of Integrated Navigation Based on BP Neural Network. In Proceedings of the 4th International Conference on Computer Science and Application Engineering (CSAE), Sanya, China, 20–22 October 2020; pp. 1–5. [Google Scholar]
- Sharaf, R.; Noureldin, A.; Osman, A.; Sheimy, N.E. Online INS/GPS Integration with a Radial Basis Function Neural Network. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 8–14. [Google Scholar] [CrossRef]
- Malleswaran, M.; Deborah, S.A.; Manjula, S.; Vaidehi, V. Integration of INS and GPS Using Radial Basis Function Neural Networks for Vehicular Navigation. In Proceedings of the 2010 11th International Conference on Control, Automation, Robotics and Vision, Singapore, 7–10 December 2010; pp. 2427–2430. [Google Scholar]
- Tian, X.C.; Xu, C.D. Novel Hybrid of Strong Tracking KF and Improved Radial Basis Function Neural Network for GPS/INS Integrated Navigation. In Proceedings of the 2016 2nd International Conference on Control Science and Systems Engineering, Singapore, 27–29 July 2016; pp. 72–76. [Google Scholar]
- Zhang, C.; Zhao, X.; Pang, C.; Li, T.; Zhang, L. Adaptive Fault Isolation and System Reconfiguration Method for GNSS/INS Integration. IEEE Access 2020, 8, 17121–17133. [Google Scholar] [CrossRef]
- Liu, H.; Li, K.; Fu, Q.; Yuan, L. Research on Integrated Navigation Algorithm Based on Radial Basis Function Neural Network. J. Phys. Conf. Ser. 2021, 1961, 012031. [Google Scholar] [CrossRef]
- Zhao, D.; Qian, H.; Shen, F. Application of Neural Network and Improved Unscented KF for GPS/SINS Integrated Navigation System. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 177–185. [Google Scholar]
- Pang, C.-P.; Liu, Z.-Z. Bridging GPS outages of tightly coupled GPS/SINS based on the adaptive track fusion using RBF neural network. In Proceedings of the 2009 IEEE International Symposium on Industrial Electronics, Seoul, Republic of Korea, 5–8 July 2009; pp. 960–965. [Google Scholar]
- Wu, Z.; Wang, W. INS/magnetometer integrated positioning based on neural network for bridging long-time GPS outages. GPS Solut. 2019, 23, 88. [Google Scholar] [CrossRef]
- Shaukat, N.; Ali, A.; Iqbal, M.J.; Moinuddin, M.; Otero, P. Multi-Sensor Fusion for Underwater Vehicle Localization by Augmentation of RBF Neural Network and Error-State KF. Sensors 2021, 21, 1149. [Google Scholar] [CrossRef] [PubMed]
- Ning, Y.; Wang, J.; Han, H.; Tan, X.; Liu, T. An Optimal Radial Basis Function Neural Network Enhanced Adaptive Robust Kalman Filter for GNSS/INS Integrated Systems in Complex Urban Areas. Sensors 2018, 18, 3091. [Google Scholar] [CrossRef] [Green Version]
- Guan, X.; Cai, C. A New Integrated Navigation System for the Indoor Unmanned Aerial Vehicles (UAVs) Based on the Neural Network Predictive Compensation. In Proceedings of the 2018 33rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Nanjing, China, 18–20 May 2018; pp. 575–580. [Google Scholar]
- Hu, H.; Zhang, J. Application of Hybrid Filtering Algorithm Based on Neural Network in INS/GPS Integrated Navigation System. In Proceedings of the 2018 IEEE 4th International Conference on Control Science and Systems Engineering, Wuhan, China, 21–23 August 2018; pp. 317–321. [Google Scholar]
- Duan, Y.; Li, H.; Wu, S.; Zhang, K. INS Error Estimation Based on an ANFIS and Its Application in Complex and Covert Surroundings. Int. J. Geo-Inf. 2021, 10, 388. [Google Scholar] [CrossRef]
- Dai, H.F.; Bian, H.-W.; Wang, R.-Y.; Ma, H. An INS/GNSS integrated navigation in GNSS denied environment using recurrent neural network. Def. Technol. 2020, 16, 334–340. [Google Scholar] [CrossRef]
- Fu, J.; Wang, Y.; Li, J.; Zheng, Z.; Yin, X. Recurrent Networks for Integrated Navigation. In Advances in Neural Networks—ISNN; Lecture Notes in Computer Science; Wang, J., Liao, X.F., Yi, Z., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3498, pp. 297–302. [Google Scholar]
- Yan, F.; Li, S.; Zhang, E.; Chen, Q. An Intelligent Adaptive KF for Integrated Navigation Systems. IEEE Access 2020, 8, 213306–213317. [Google Scholar] [CrossRef]
- Sun, Z.; Di, L.; Fang, H. Using long short-term memory recurrent neural network in land cover classification on Landsat and Cropland data layer time series. Int. J. Remote Sens. 2018, 40, 593–614. [Google Scholar] [CrossRef]
- Diaconescu, E. The use of NARX neural networks to predict chaotic time series. WSEAS Trans. Comput. Res. 2008, 3, 182–191. [Google Scholar]
- Fang, W.; Jiang, J.; Lu, S.; Gong, Y.; Tao, Y.; Tang, Y.; Yan, P.; Luo, H.; Liu, J. A LSTM algorithm estimating pseudo measurements for aiding INS during GNSS signal outages. Remote Sens. 2020, 12, 256. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Li, A.; Qin, F.; Chang, L.; Qian, L. A Hybrid Method for Dealing with DVL Faults of SINS/DVL Integrated Navigation System. IEEE Sens. J. 2022, 22, 15844–15854. [Google Scholar] [CrossRef]
- Xiao, X.; Sun, J.; Zhang, Q. A Fusion Method Based on ANN to Overcome the GNSS Outages for GNSS/INS System. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 4914–4919. [Google Scholar]
- Carrio, A.; Sampedro, C.; Ramos, A.R.; Campoy, P. A Review of Deep Learning Methods and Applications for Unmanned Aerial Vehicles. J. Sens. 2017, 2017, 3296874. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Chang, Z.; Zhang, W.; Zhang, J.; Sun, Y. Research on the Integrated Positioning Method of Inertial/Visual Aided by Convolutional Neural Network. In Proceedings of the 10th International Conference on Control, Automation and Information Sciences, Xi’an, China, 14–17 October 2021; pp. 221–227. [Google Scholar]
- Xu, H.; Lian, B. Fault detection for multi-source integrated navigation system using fully convolutional neural network. IET Radar Sonar Navig. 2018, 12, 774–782. [Google Scholar] [CrossRef]
- Cheng, C.-H.; Wang, T.-P.; Huang, Y.-F. Indoor Positioning System Using Artificial Neural Network with Swarm Intelligence. IEEE Access 2020, 8, 84248–84257. [Google Scholar] [CrossRef]
- Wang, Q.; Xu, X.-S. SINS/GPS Integrated Navigation for Autonomous Underwater Vehicle with Wavelet Package Analysis and Neural Networks. In Proceedings of the 8th ACIS International Conference on Software Engineering, Artificial Intelligence, Networking, and Parallel/Distributed Computing, Qingdao, China, 30 July–1 August 2007; pp. 1028–1033. [Google Scholar]
- Wei, X.; Li, J.; Feng, K.; Zhang, D.; Li, P.; Zhao, L.; Jiao, Y. A mixed optimization method based on adaptive Kalman filter and wavelet neural network for INS/GPS during GPS outages. IEEE Access 2021, 9, 47875–47886. [Google Scholar] [CrossRef]
- Sabbagh, M.S.E.; Maher, A.; Hassan, M.A.; Kamel, A.M. Nonlinear Autoregressive Neural Network Integrated Approach for Tackling GPS Outages Intervals. In Proceedings of the 2022 13th International Conference on Electrical Engineering (ICEENG), Cairo, Egypt, 29–31 March 2022; pp. 14–17. [Google Scholar]
- Bitar, N.A.; Gavrilov, A. A novel approach for aiding unscented Kalman filter for bridging GNSS outages in integrated navigation systems. Navigation 2021, 68, 521–539. [Google Scholar] [CrossRef]
- Mingjian, L.C.; Chao, Z.; Lundong, Z.; Rui, C. A Novel Neural Network-Based SINS/DVL Integrated Navigation Approach to Deal with DVL Malfunction for Underwater Vehicles. Math. Probl. Eng. 2020, 2020, 2891572. [Google Scholar]
- Aslinezhad, M.; Malekijavan, A.; Abbasi, P. ANN-assisted robust GPS/INS information fusion to bridge GPS outage. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 129. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, Q.; Liang, W.; Zhou, Y. GPS/INS Integrated Navigation with LSTM Neural Network. In Proceedings of the 2021 4th International Conference on Intelligent Autonomous Systems (ICoIAS), Wuhan, China, 14–16 May 2021; pp. 345–350. [Google Scholar]
- Guo, C.; Tu, W. A Novel Self-Learning GNSS/INS Integrated Navigation Method. In Proceedings of the 34th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2021), St. Louis, MI, USA, 20–24 September 2021; pp. 168–179. [Google Scholar]
- Zhang, Y. A Fusion Methodology to Bridge GPS Outages for INS/GPS Integrated Navigation System. IEEE Access 2019, 7, 61296–61306. [Google Scholar] [CrossRef]
- Zhu, J.; Li, A.; Qin, F.; Che, H.; Wang, J. A Novel Hybrid Method Based on Deep Learning for an Integrated Navigation System during DVL Signal Failure. Electronics 2022, 11, 2980. [Google Scholar] [CrossRef]
- Xiao, J.; Li, Y.; Zhang, C.; Zhang, Z. INS/GPS Integrated Navigation for Unmanned Ships Based on EEMD Noise Reduction and SSA-ELM. J. Mar. Sci. Eng. 2022, 10, 1733. [Google Scholar] [CrossRef]
- Zheng, J.; Zhao, W.; Han, B.; Wen, Y. Integrating Extreme Learning Machine with KF to Bridge GPS Outages. In Proceedings of the 3rd International Conference on Information Science and Control Engineering (ICISCE), Beijing, China, 8–10 July 2016; pp. 420–424. [Google Scholar]
- Li, D.; Jia, X.; Zhao, J. A Novel Hybrid Fusion Algorithm for Low-Cost GPS/INS Integrated Navigation System during GPS Outages. IEEE Access 2020, 8, 53984–53996. [Google Scholar] [CrossRef]
- Li, D.; Wu, Y.; Zhaom, J. Novel Hybrid Algorithm of Improved CKF and GRU for GPS/INS. IEEE Access 2020, 8, 202836–202847. [Google Scholar] [CrossRef]
- Tang, Y.; Jiang, J.; Liu, J.; Yan, P.; Tao, Y.; Liu, J. A GRU and AKF-Based Hybrid Algorithm for Improving INS/GNSS Navigation Accuracy during GNSS Outage. Remote Sens. 2022, 14, 752. [Google Scholar] [CrossRef]
- Zhao, S.; Zhou, Y.; Huang, T. A Novel Method for AI-Assisted INS/GNSS Navigation System Based on CNN-GRU and CKF during GNSS Outage. Remote Sens. 2022, 14, 4494. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, Q.; Zhou, Y. Deep Learning-Enabled Fusion to Bridge GPS Outages for INS/GPS Integrated Navigation. IEEE Sens. J. 2022, 22, 8974–8985. [Google Scholar] [CrossRef]
- Jun, W.; Song, J.; Chen, M.; Yang, Z. Road network extraction: A neural-dynamic framework based on deep learning and a finite state machine. Int. J. Remote Sens. 2015, 36, 3144–3169. [Google Scholar]
- Mohammad, A.; Khaleghi, T.; Yang, K. An integrated feature learning approach using deep learning for travel time prediction. Expert Syst. Appl. 2020, 139, 112864. [Google Scholar]
- Dong, L.; Zhao, D.; Zhang, Q.; Chen, Y. Reinforcement learning and deep learning based lateral control for autonomous driving. IEEE Comput. Intell. Mag. 2019, 14, 83–98. [Google Scholar]
- Karim, A.; Samy, M.; Shaker, M.; Helw, M.E. Deep Convolutional Neural Network Based Autonomous Drone Navigation. In Proceedings of the Thirteenth International Conference on Machine Vision, Bari, Italy, 3–6 July 1996; Volume 11605, pp. 16–24. [Google Scholar]
- Gang, L.; Ma, B.; He, S.; Ren, X.; Liu, Q. Automatic tunnel crack detection based on u-net and a convolutional neural network with alternately updated clique. Sensors 2020, 20, 717. [Google Scholar]
- Jelena, K.; Jovičić, N.; Drndarević, V. An end-to-end deep neural network for autonomous driving designed for embedded automotive platforms. Sensors 2019, 19, 2064. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Navigation Fusion Algorithm | Features |
|---|---|
| Linear Kalman filter algorithm |
|
| Nonlinear filter algorithms, including the EKF, UKF, and CKF |
|
| Sequential Monte Carlo (SMC) approaches |
|
| Adaptive filter algorithms |
|
| Neural-network-assisted filtering algorithm |
|
| Deep learning improvement algorithm |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jwo, D.-J.; Biswal, A.; Mir, I.A. Artificial Neural Networks for Navigation Systems: A Review of Recent Research. Appl. Sci. 2023, 13, 4475. https://doi.org/10.3390/app13074475
Jwo D-J, Biswal A, Mir IA. Artificial Neural Networks for Navigation Systems: A Review of Recent Research. Applied Sciences. 2023; 13(7):4475. https://doi.org/10.3390/app13074475
Chicago/Turabian StyleJwo, Dah-Jing, Amita Biswal, and Ilayat Ali Mir. 2023. "Artificial Neural Networks for Navigation Systems: A Review of Recent Research" Applied Sciences 13, no. 7: 4475. https://doi.org/10.3390/app13074475