1. Introduction
A rollover while a vehicle is in motion not only poses a threat to the driver but is also prone to causing significant property damage and may even cause additional accidents. Among various traffic accidents, car rollover accidents result in a mortality rate of 33%, with over 90% of non-collision accidents being due to car rollovers [
1]. Therefore, it is crucial to provide timely rollover warnings for moving cars and to use active control techniques and other means to avoid rollover accidents, and subsequently improve the driving stability of cars. The driving stability and safety of forest fire trucks in forest terrain are not only subjected to highly nonlinear vehicle dynamics constraints but also affected by complex terrain elements, such as inclinations in the road and bumpy obstacles, which significantly increase the probability of vehicle rollover.
Generally, vehicle rollovers are divided into trip- and non-trip-type rollovers. A trip-type rollover is caused by the vehicle sliding sideways because of obstacles, whereas the non-trip-type rollover is caused by the vehicle driving in a curve. The unpredictability of trip-type rollovers makes it difficult to control them effectively and actively; therefore, researchers have focused on non-trip-type rollovers of vehicles [
2,
3,
4,
5].
The basis of studying vehicle driving stability is to establish the dynamic model of the vehicle. The form of the model and the factors considered in modeling should ensure the accuracy of the theoretical established model while meeting the actual driving posture of the vehicle. Analyzing the characteristics of the vehicle and further establishing the vehicle rollover dynamics model of different vehicles, external excitations, etc., is important for vehicle rollover warning and rollover control. Researchers have established respective dynamics models according to their needs, and based on their complexity, there are rollover plane models, longitudinal-lateral-vertical three-degrees-of-freedom (3-DOF) dynamics models, and multi-degrees-of-freedom models.
In studying the anti-rollover of tractors, Gao et al. [
6] established a 3-DOF vehicle dynamics model that includes automatic steering. Ke [
7] and colleagues established a 3-DOF linear dynamics model capable of real-time changes. Rezapour [
8] established an 8-DOF vehicle dynamics model for the anti-rollover of crawler vehicles. Tang et al. [
9] developed a 4-DOF vehicle dynamics model for the uncertainty of the driving environment of driverless cars. Zhang et al. [
10] established a multi-degrees-of-freedom vehicle dynamics model, including a tire model based on uneven roads. Moreover, Wang [
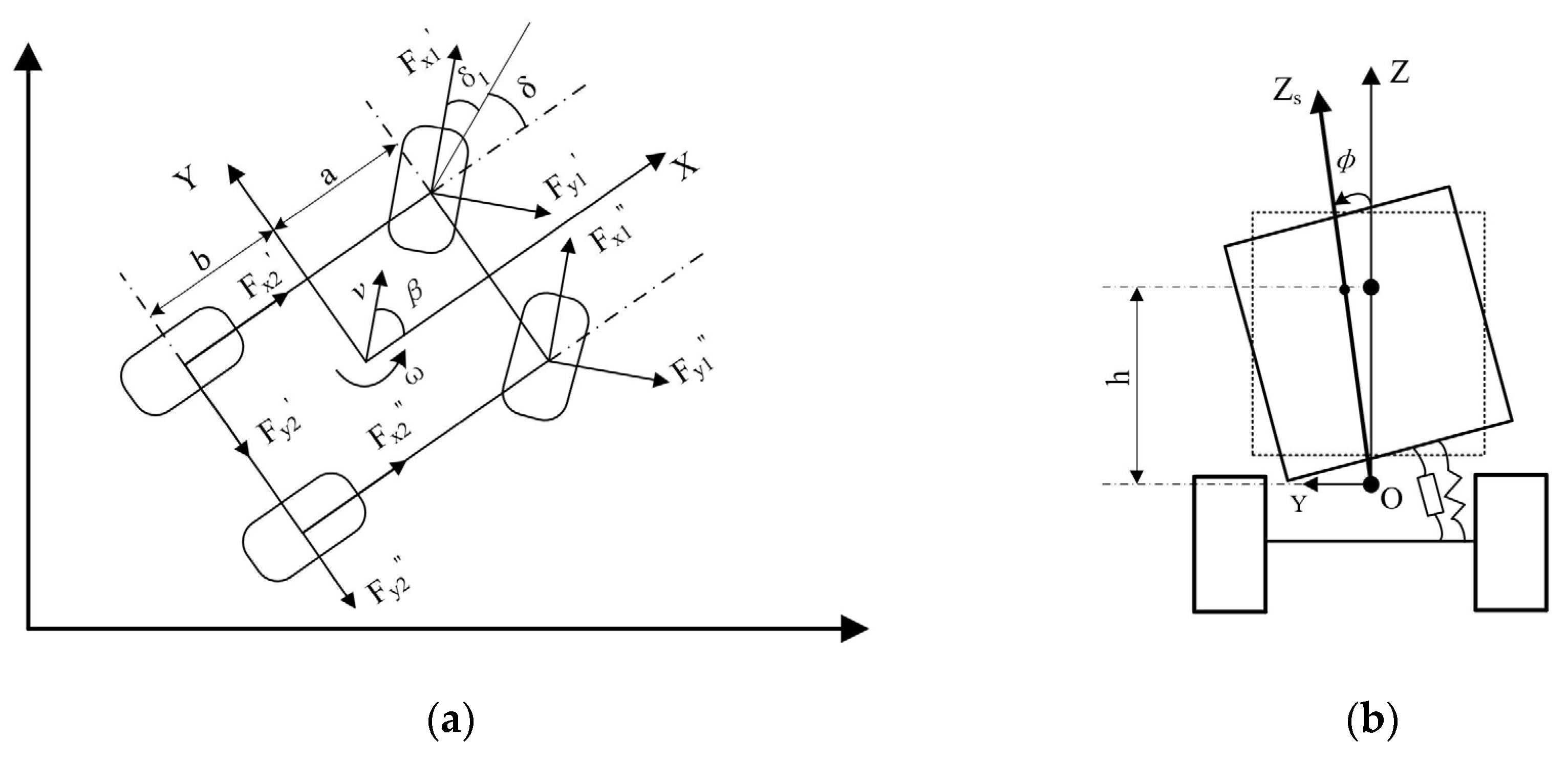
11] established a random wandering model to estimate the attitude of the vehicle, such as longitudinal velocity, lateral velocity, and transverse angular velocity, and avoided complex tire forces. As the degrees of freedom increase, the dynamics model becomes more complex and the error increases. Therefore, this study combined the study of driving stability of forest fire truck operations to establish a 3-DOF dynamics model of transverse pendulum motion, lateral motion, and longitudinal motion.
Active anti-rollover techniques and rollover warnings are two of the widely researched current topics. Rollover warning refers to an early warning system that can determine whether the vehicle is close to or has reached the critical situation of rollover according to the current state of the vehicle and provide a timely warning. It is conducive to the driver to take emergency measures and the operation of the anti-rollover control system, which can prevent rollover accidents. Researchers have proposed early warning algorithms for rollover warning in combination with their own research objects.
Wang [
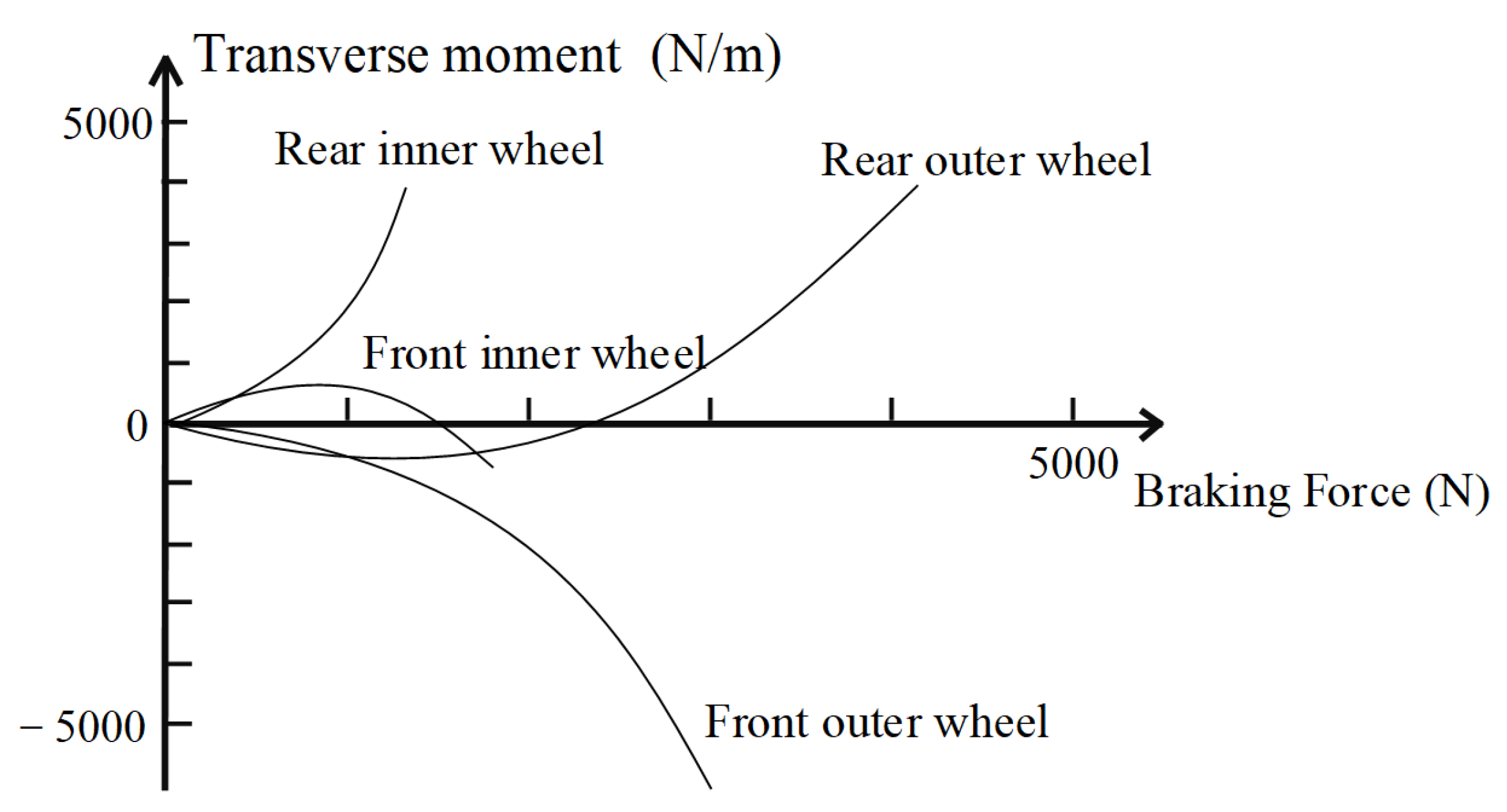
12] and colleagues combined the secondary predicted zero moment point position of a vehicle to realize vehicle rollover warning. The anti-rollover system starts to work by calculating the lateral position of the vehicle’s zero moment point, deriving the theoretical time when the vehicle rollover occurs, and comparing whether the vehicle’s secondary predicted zero moment point lateral position is greater than the set threshold value. The anti-rollover control strategy of differential braking based on the fuzzy PID algorithm was selected to brake the front outer wheels of the vehicle. Wang et al. [
13] proposed a time-to-rollover warning algorithm for TTR, which uses the lateral load transfer ratio as a rollover decision indicator. Ru et al. [
14] designed an ARM11-based rollover warning algorithm to detect the rollover attitude of a vehicle and alert the driver to take appropriate measures when the rollover reaches the trigger condition. Dong [
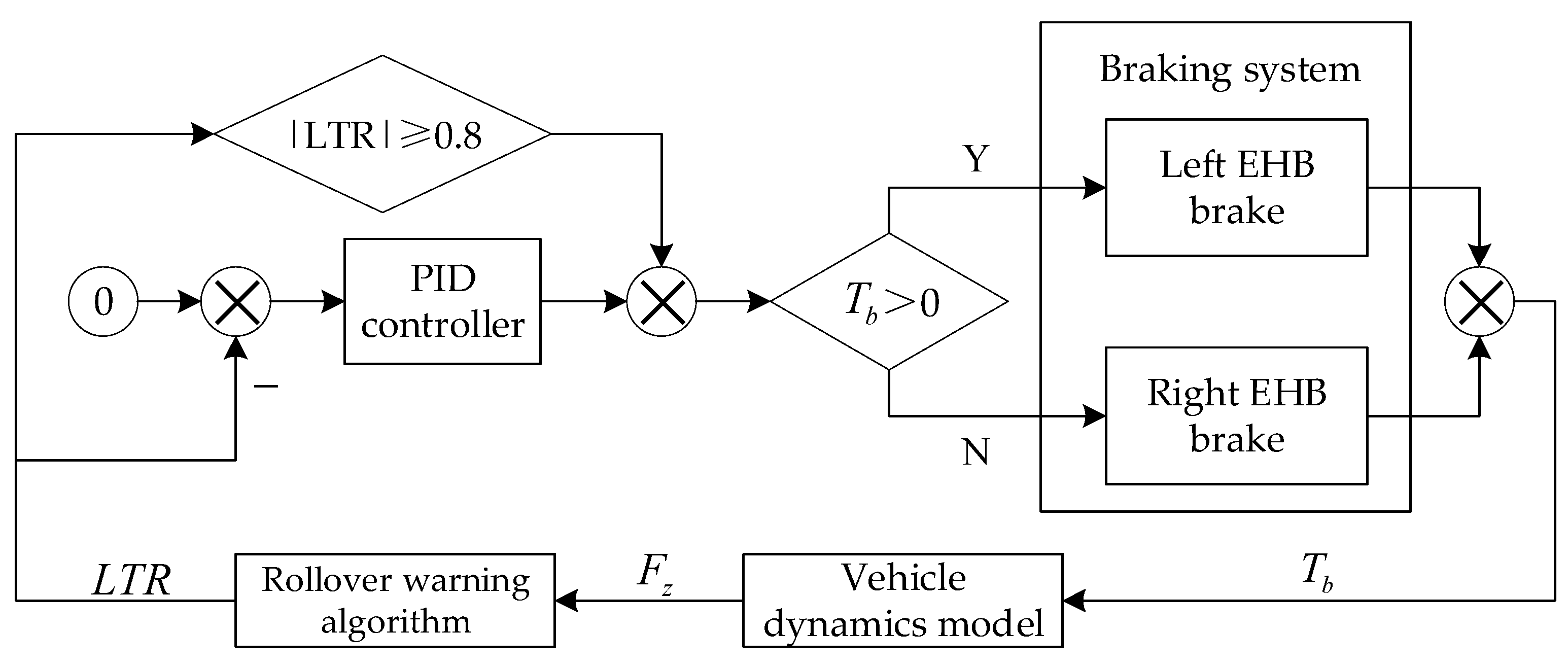
15] and other scholars used multi-sensor fusion to detect the operating state of the vehicle and used the real-time lateral load transfer rate (LTR) as the early warning algorithm for vehicle rollover. Since LTR has good universality and its results are not influenced by the vehicle model and operating environment, etc., in a comprehensive analysis, LTR was selected as the evaluation index of vehicle rollover in this study, and the braking scheme of the wheels was developed according to the actual value of LTR.
The active anti-rollover technologies of vehicles primarily improve the rollover threshold of vehicles, mainly active suspension [
16] and semi-active suspension [
17], active anti-rollover stabilizer bars [
18], active steering [
19], differential braking [
20], etc. The above active-control techniques can be performed without significantly changing the main structure of the vehicle. Amin et al. [
21] designed active variable-geometry suspension based on ground touring vehicles and combined it with corresponding controllers to verify whether it can reduce body acceleration, roll angle, etc. and improve the lateral stability of the vehicle. Zhu [
22] and colleagues proposed an adaptive semi-active suspension system based on AdaBoost to enhance the anti-roll capability of the vehicle. Tan [
23] and other scholars designed an active sway bar stabilization system based on an electro-hydraulic actuator to achieve vehicle driving stability by adding an additional transverse sway moment and selecting quadratic optimal control as the algorithm of the system controller. Arslan [
24] and others developed a nonlinear prediction-based active steering control strategy to minimize the vertical load variation of the wheels by controlling the actual transverse swing angular velocity, which can improve the stability of the vehicle.
However, owing to the complex and expensive suspension structure, it is less often applied. The active anti-roll stabilizer bar, although simple in structure, is not easy to load in existing vehicle systems. Since the model studied in this paper was for forest fire trucks, active steering has certain constraints when the vehicle is driven on fire roads, and the situation considered is more complicated. At present, the anti-rollover control of heavy vehicles mostly adopts the differential braking method [
25,
26,
27,
28], so after comprehensive consideration, we selected the control strategy of line-control action for the anti-rollover control of a forest fire truck during the driving process.
Brake by wire is divided into electro-hydraulic brake-by-wire (EHB) and electro-mechanical brake-by-wire (EMB). Electro-hydraulic brakes combine electronically controlled technology with conventional hydraulic brakes, using a booster mechanism instead of a vacuum booster, with backup braking capability. Compared to EHB, electro-mechanical brakes no longer use hydraulic technology, and they respond directly to the braking demand with motor and mechanical components [
29,
30,
31,
32,
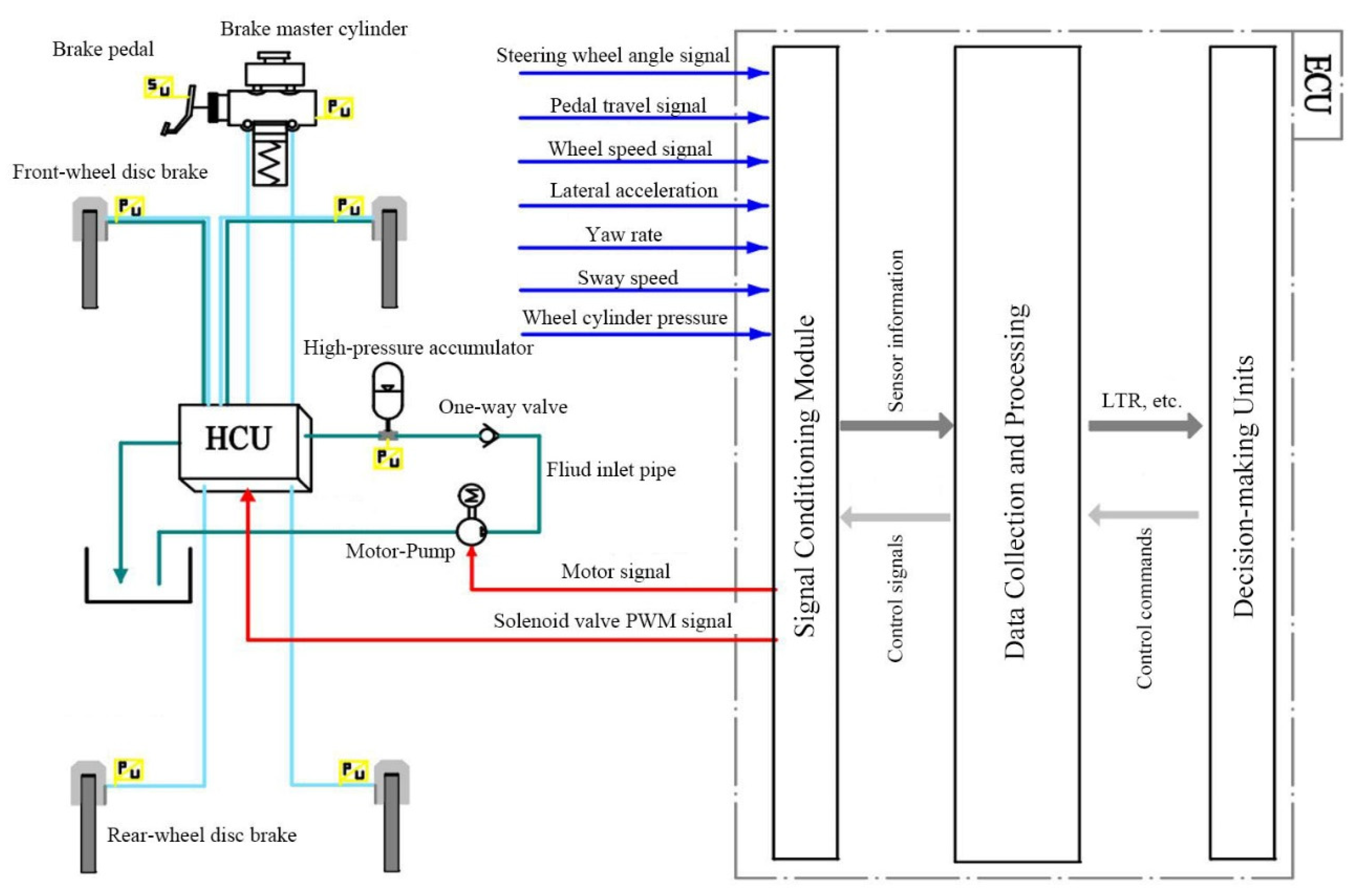
33] to achieve faster response and higher operational accuracy. At this stage, the research on wire-controlled braking technology has not yet fully met the requirements of EHB owing to the lack of stable control of pure motor braking. This study entailed the use of an electric power-assisted electrohydraulic line control actuation system for anti-rollover auxiliary braking, based on the hydraulic braking system of a forest fire truck, using an electric motor as a power-assisted device and a plunger pump high-pressure accumulator to apply oil pressure directly to the brake wheel cylinder to achieve brake pressure control.
Many control algorithms have been proposed to control the anti-rollover of vehicles more accurately, such as linear quadratic optimal control, sliding mode control, proportional–integral–derivative (PID) algorithms, model predictive control (MPC), robust control, and differential flatness theory [
34,
35,
36,
37]. Among them, linear quadratic optimal control has been applied to design the controller based on the system state space, and the accuracy of the control unit is an extremely complex nonlinear dynamical system that is not within the scope of this study. Sliding mode control is highly resistant to disturbances; however, additional jitter is generated during the sliding process owing to system inertia. Predictive control is yet to be solved for MPC of nonlinear, uncertain, and time-varying systems. Generally, robust control systems do not operate in an optimal state and are less stable. Differential flat theory has been commonly applied to the trajectory planning of vehicles.
To improve the control performance and robustness of the traditional PID algorithm, scholars at home and abroad have proposed targeted controllers in combination with their research objects. Kang et al. [
36] employed a differential braking control strategy on the basis of a flexible PID control algorithm to optimally compensate for the vehicle transverse sway moment and effectively improve the vehicle rollover stability. Zong et al. [
38] used a PID control algorithm to solve the optimal transverse moment for stable vehicle driving and selected the outer wheel of the front axle of the vehicle as the braking wheel to realize anti-rollover control of differential braking. Nguyen [
2] designed a dual-input fuzzy controller to control a hydraulic stabilizer bar, which effectively decreased the rollover index of the vehicle and improved its stability and driving safety. By comparing the applications of the fuzzy-PID and sliding film control strategies, Wang et al. [
39] and Zhang et al. [
40] proposed a front and rear axle braking force distribution method, designed a sliding film controller that could improve system stability, and proposed a braking coordination control strategy that combined regenerative braking and anti-lock braking.
Moshayedi [
41] and other scholars discussed the path tracking performance of a PID controller in empirical rectification method, particle swarm algorithm, and BAS, respectively, and the results showed that the PID control algorithm has strong credibility in robot modeling as well as path tracking function. The use of deep learning for visual tracking and velocity detection of UAVs was also proposed [
42]. Dong et al. [
43] proposed a segmented optimal PID, which effectively improved the conflict between regulation performance and damping characteristics of hydropower systems. Zafer [
44] combined intelligent PID and a PD-feedforward controller, which has the advantage of not requiring an exact model and improving the immunity of the controller to disturbances. Zhang et al. [
45] proposed a fuzzy fractional-order PID controller, which was shown to have good control performance and immunity to disturbances. Hakan et al. [
46] developed an intelligent PID algorithm based on particle swarm optimization for automatic guided vehicles. Zamani et al. [
47] designed a multi-objective particle swarm optimization algorithm and to verify its effectiveness, a PID control algorithm based on multi-objective control was proposed for comparison. Four different proportional-integral differential controllers were also proposed and the robustness of each was compared [
48]. Zhang et al. [
49] applied the fuzzy proportional-integral-derivative control algorithm to air suspension dampers, which can effectively reduce body vibration. The method can calculate the adaptive expansion factor of the fuzzy theory domain.
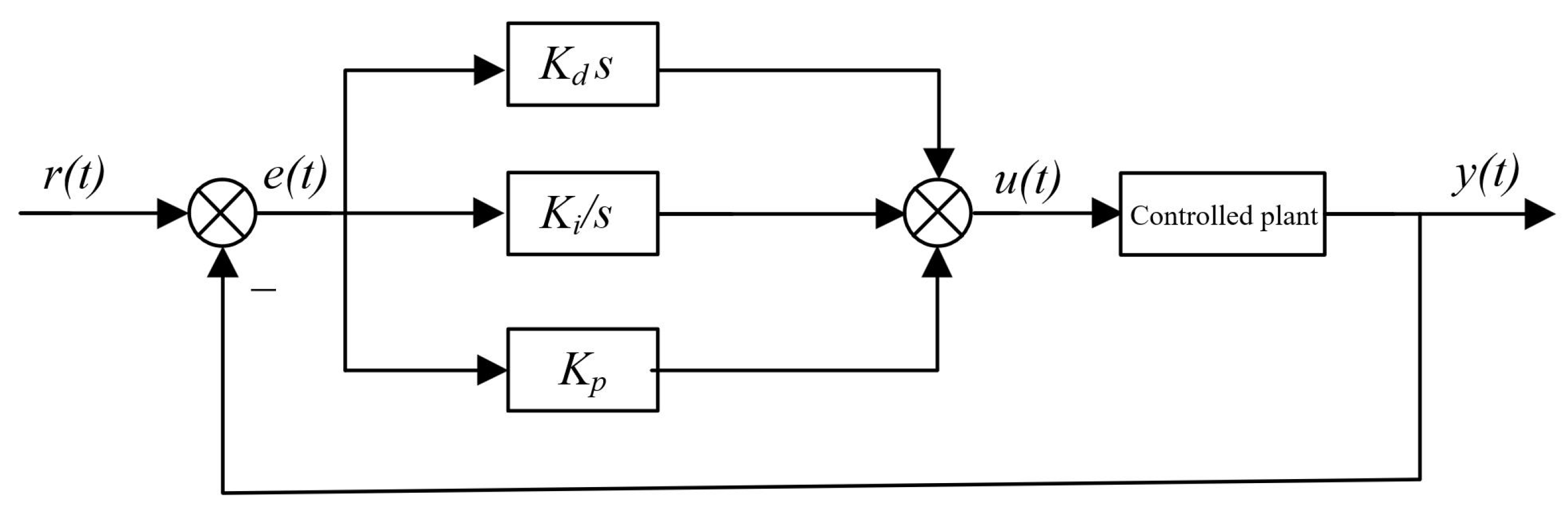
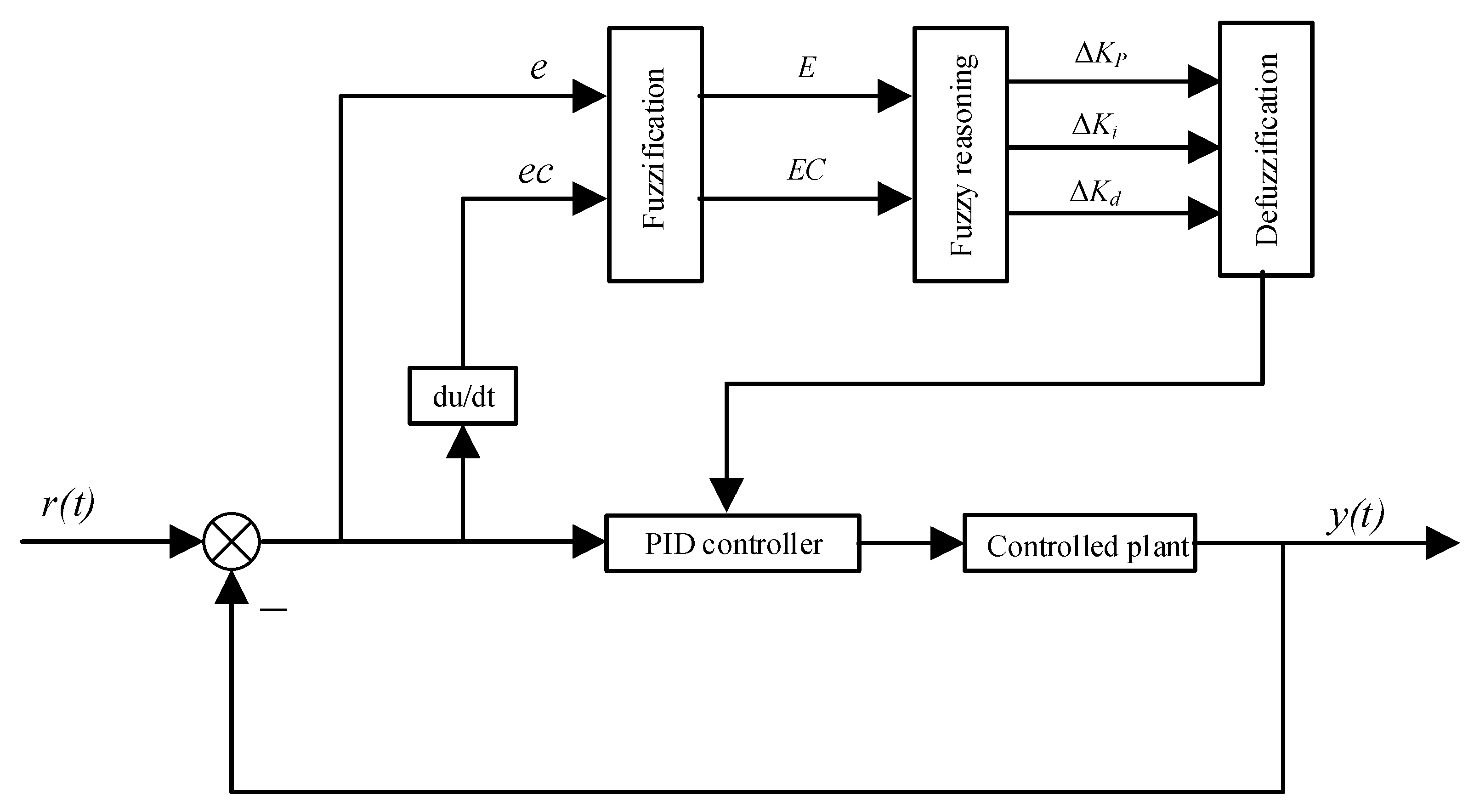
Although the PID controller can achieve accurate control, the adjustment speed is not fast, whereas the fuzzy control can be adjusted quickly but without any adjustment accuracy. Accordingly, the fuzzy-PID controller, which has the characteristics of a simple structure, good stability performance, and high reliability, was selected as the upper controller in this study.
In this study, the body attitude-related parameters, such as lateral camber angle and lateral acceleration, obtained from the inertial guidance system were used as input variables. The lateral load transfer ratio (LTR) was considered as the rollover evaluation index, and the appropriate target braking wheel was selected according to the LTR. Subsequently, the EHB system was combined with differential braking technology to autonomously reduce the speed of the vehicle to improve the driving stability of forest fire trucks during operation in forest areas.
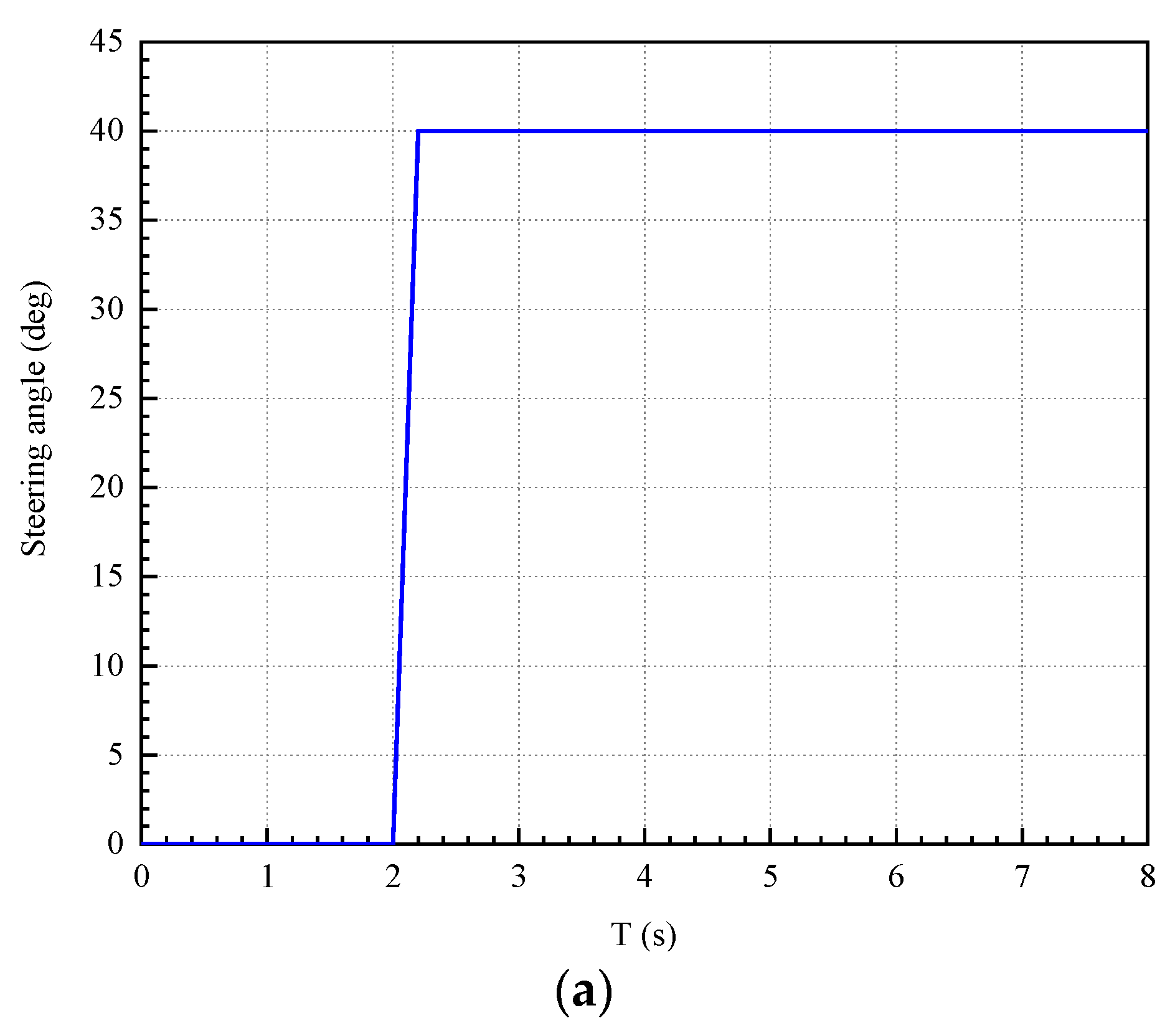
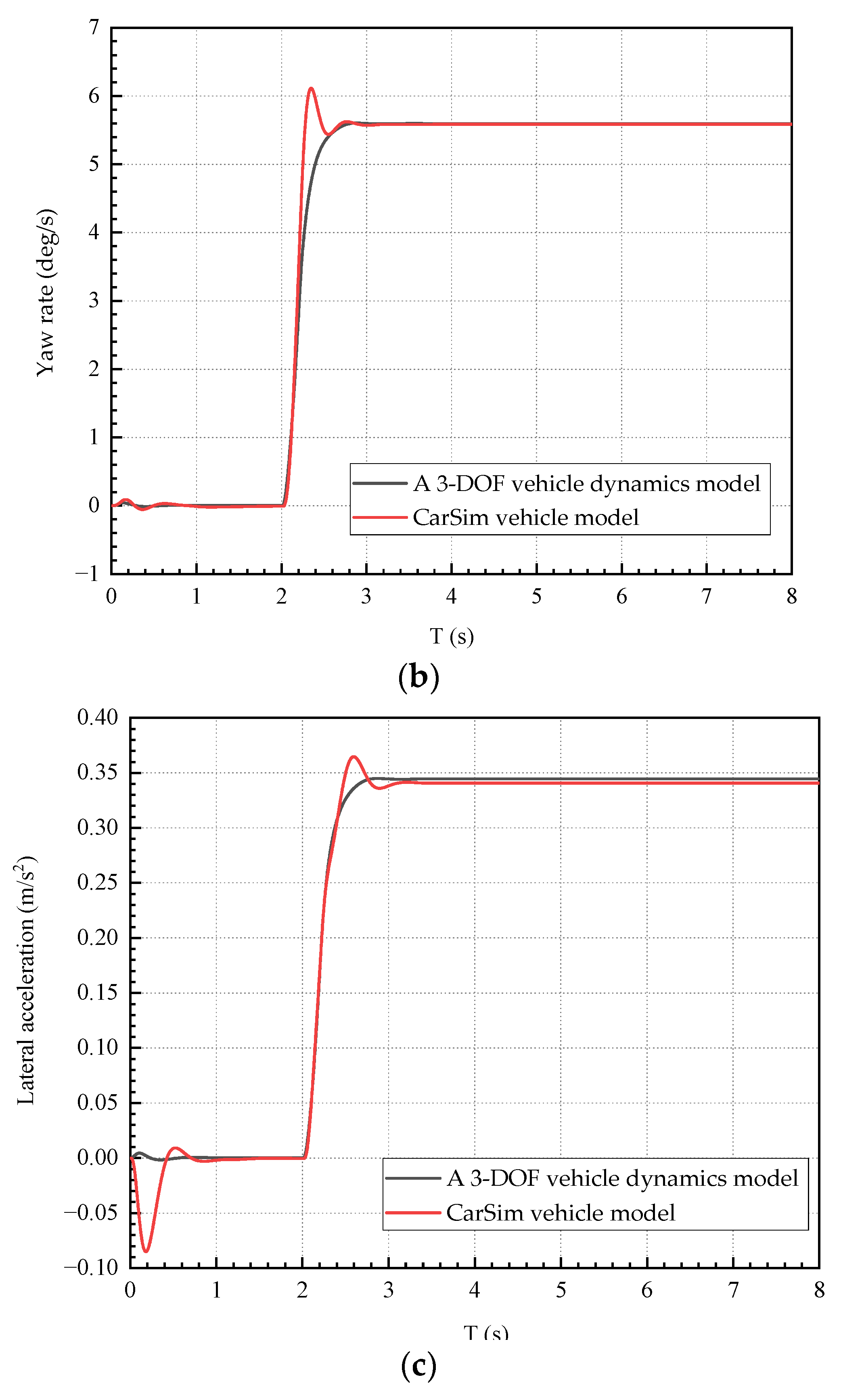
The main contributions of this paper are as follows: (1) Considering a forest fire truck as the research target, a 3-DOF vehicle rollover dynamics model was established, and the corresponding mathematical model was developed in MATLAB/Simulink. Subsequently, the correctness of the rollover dynamics model was verified in combination with CarSim; (2) The literature indicates that vehicle early warning research is a crucial prerequisite for vehicle rollover prevention. Therefore, a vehicle rollover prevention early warning algorithm transverse load transfer rate LTR was proposed, a braking torque distribution strategy was proposed, and a safety threshold range was selected; (3) The control strategy of differential braking was selected, and the PID and fuzzy PID control algorithms were proposed, and the control effect of these two algorithms on the braking system and whether the braking pressure of the target wheel cylinder can be calculated effectively were compared and analyzed; (4) Combined with the original hydraulic braking system of the forest fire truck, a set of wire-controlled auxiliary braking system with electro-assisted electro-hydraulic control was designed, and the overall design of the system was performed; and (5) To verify the designed wire-controlled control strategy, the vehicle was selected for control simulation under extreme operating conditions (fishhook steering test and steady-state test) and the final results were analyzed.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}