
Signal Control Study of Oversaturated Heterogeneous Traffic Flow Based on a Variable Virtual Waiting Zone in Dedicated CAV Lanes

Abstract
:1. Introduction
2. Related Work
2.1. Traffic Signal Control
2.2. Optimal Control of Waiting Zones
2.3. CAV Trajectory Optimization for Saturated Heterogeneous Traffic Flows
3. Description of Related Problems
3.1. Traffic Signal Control
- (1).
- HV does not change lanes in the adjustment zone and the passing zone, and the adjustment zone and passing zone are equipped with basic sensing devices, which can collect or predict the arrival information of CAV and HV at the intersection in the next signal cycle.
- (2).
- The number and location distribution of HVs can be detected by roadside infrastructure.
- (3).
- CAVs can change lanes and complete formations in the adjustment zone.
- (4).
- Each arm has a dedicated CAV lane.
- (5).
- A passing zone is allowed within the intersection.
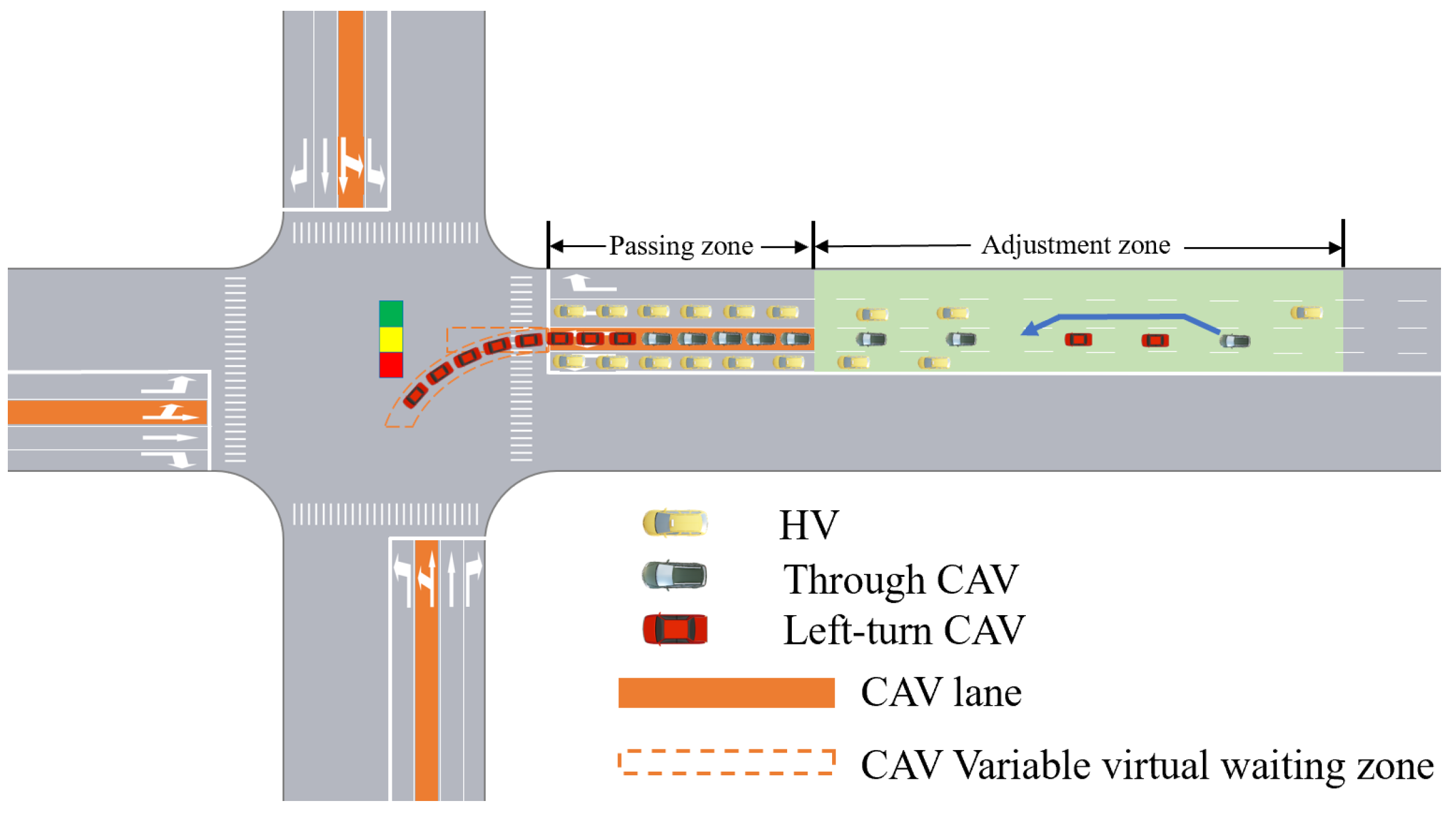
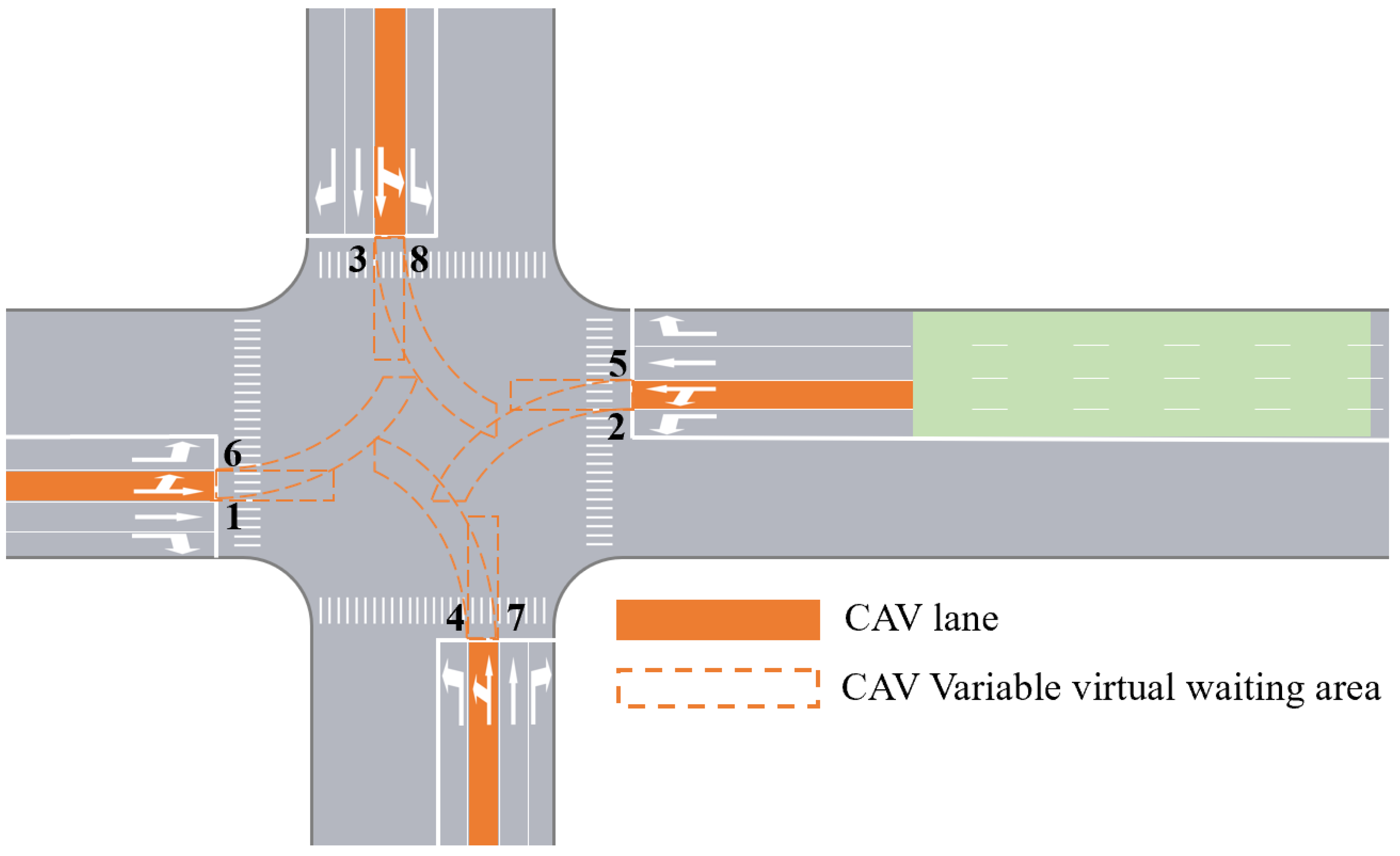
3.2. Variable Virtual Waiting Zone
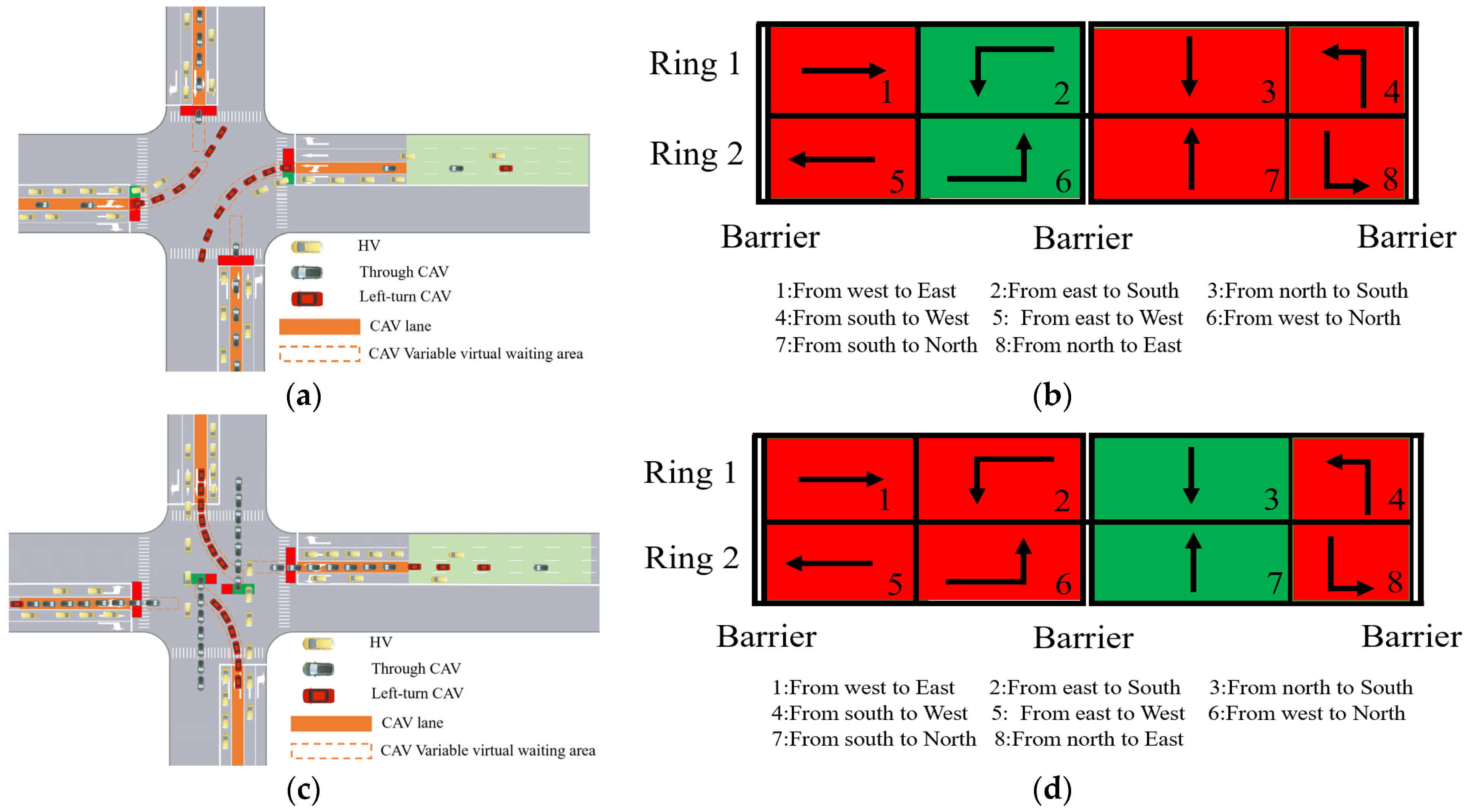
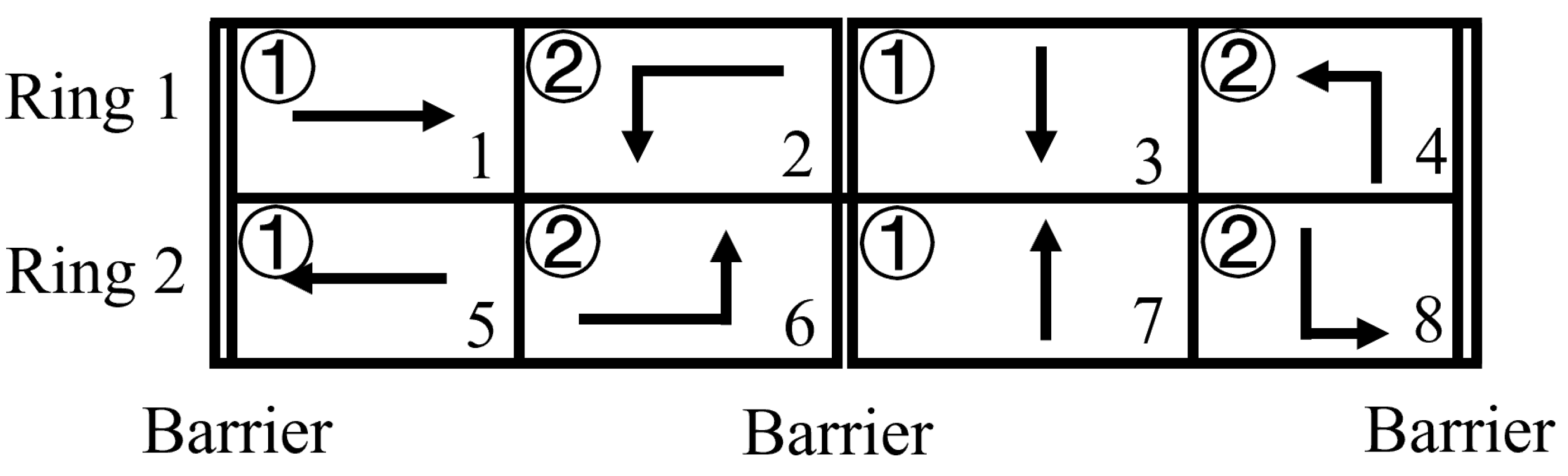
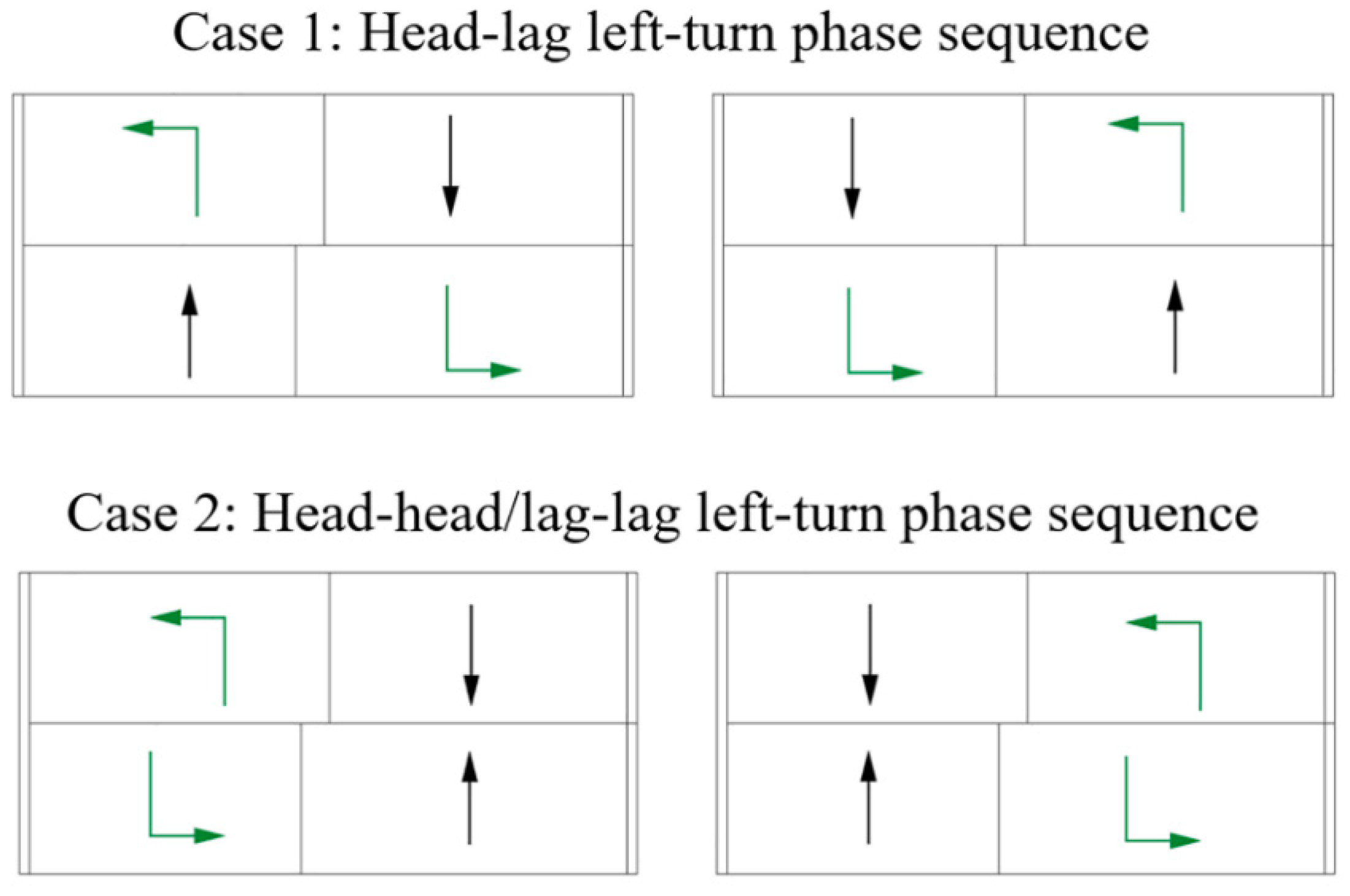
3.3. Intersection Phase Sequence Setting Analysis
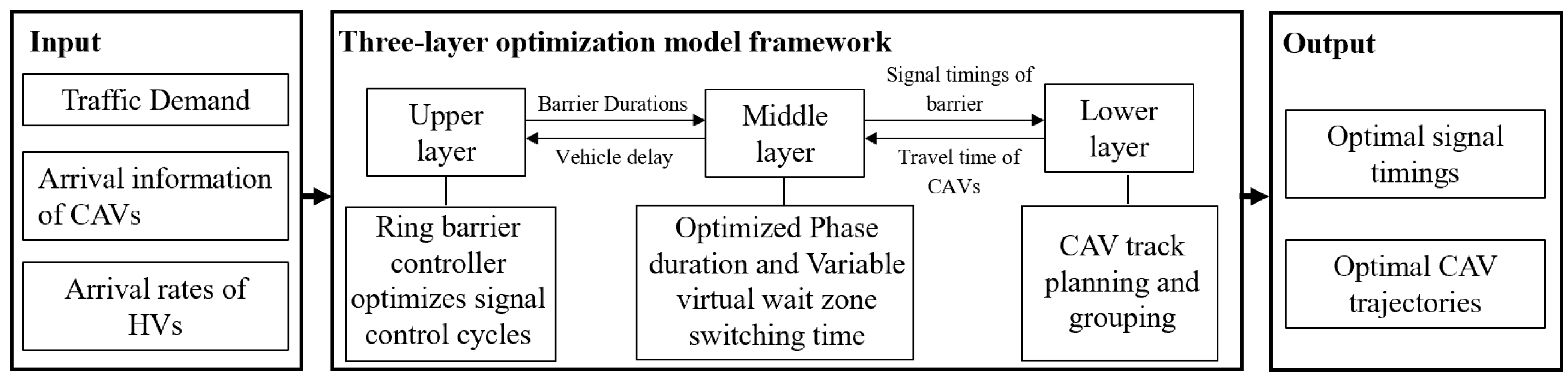
4. Model Formulation
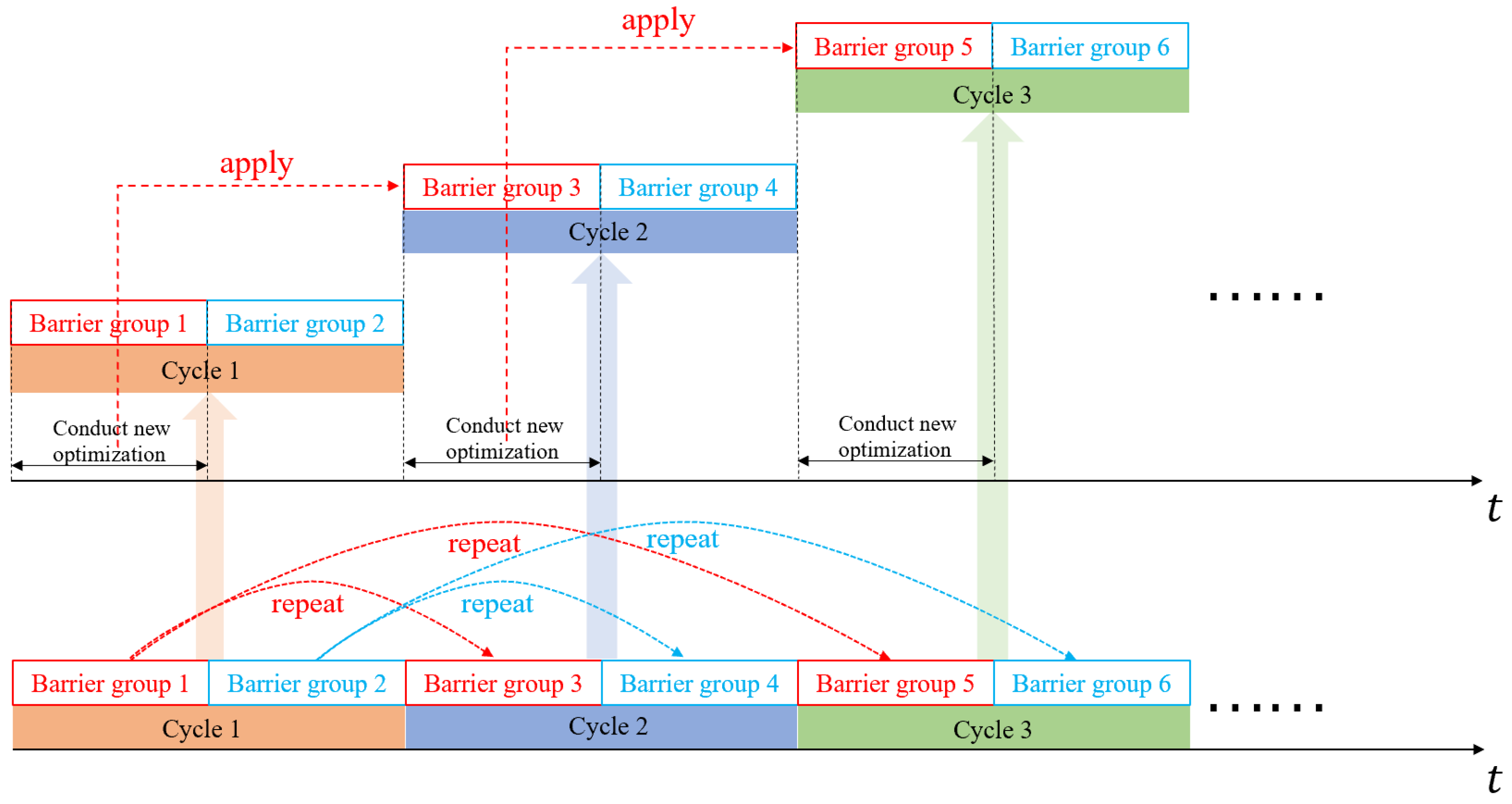
4.1. Upper-Layer model
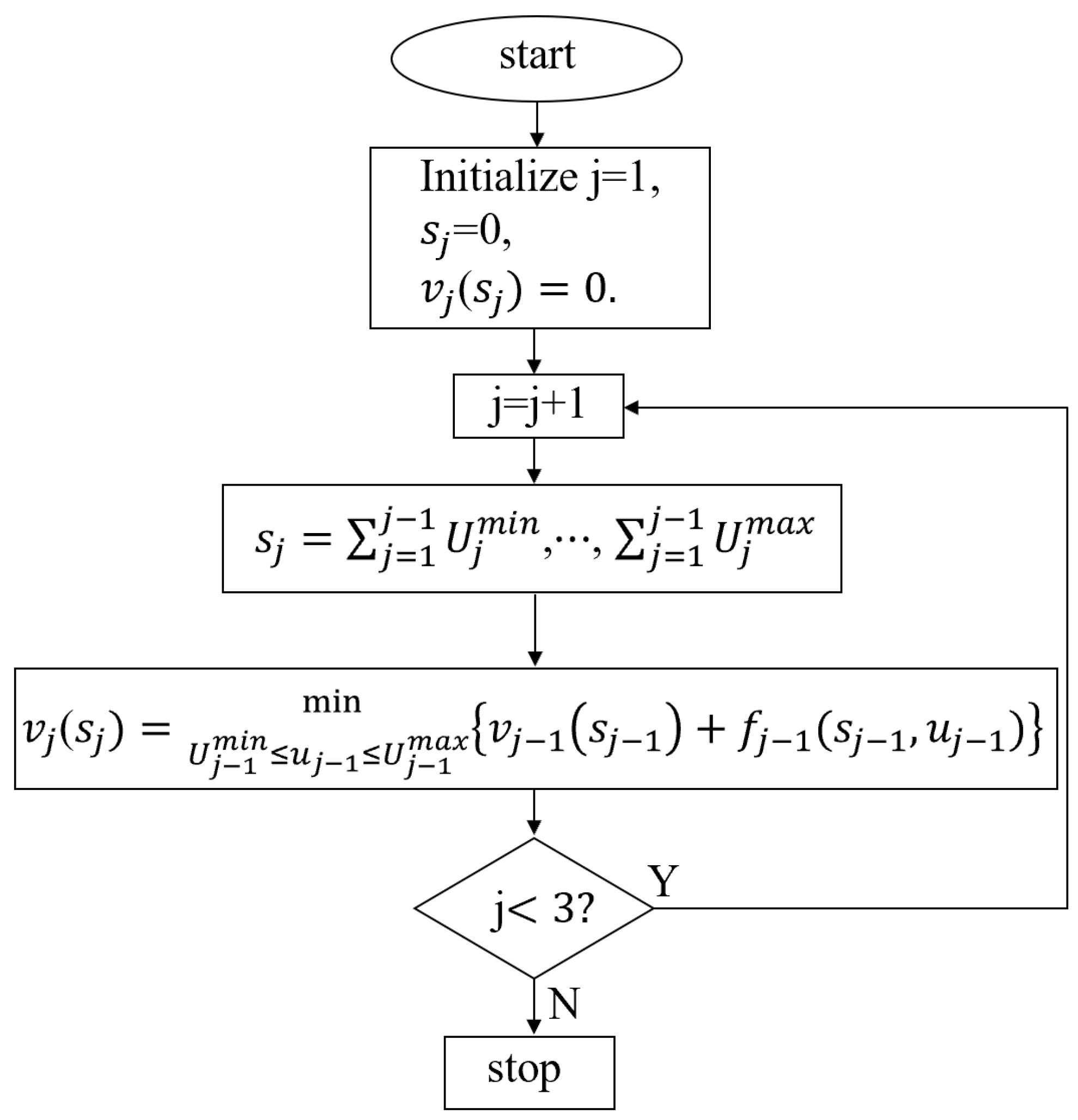
4.1.1. Forwards Recursion
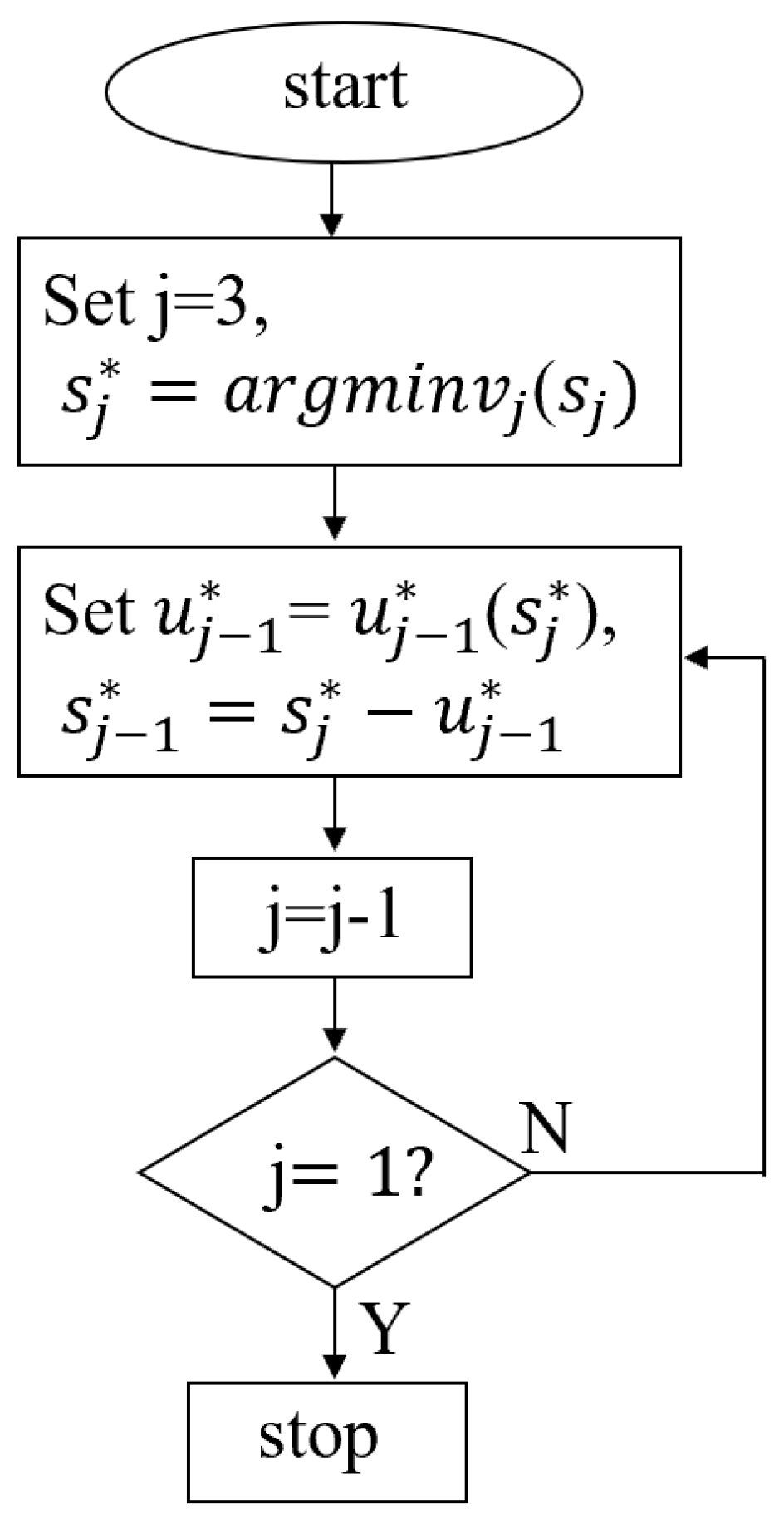
4.1.2. Backwards Recursion
4.2. Middle-Layer Model
4.2.1. Human-Driven Vehicle Delays
4.2.2. Connected and Autonomous Vehicle Delays
4.2.3. Determination of Variable Virtual Waiting Zone Holding Time
4.2.4. Signal Constraints
4.2.5. Determination of Variable Virtual Waiting Zone Holding Time
4.3. Lower-Layer Model
4.3.1. CAV Queue Adjustment
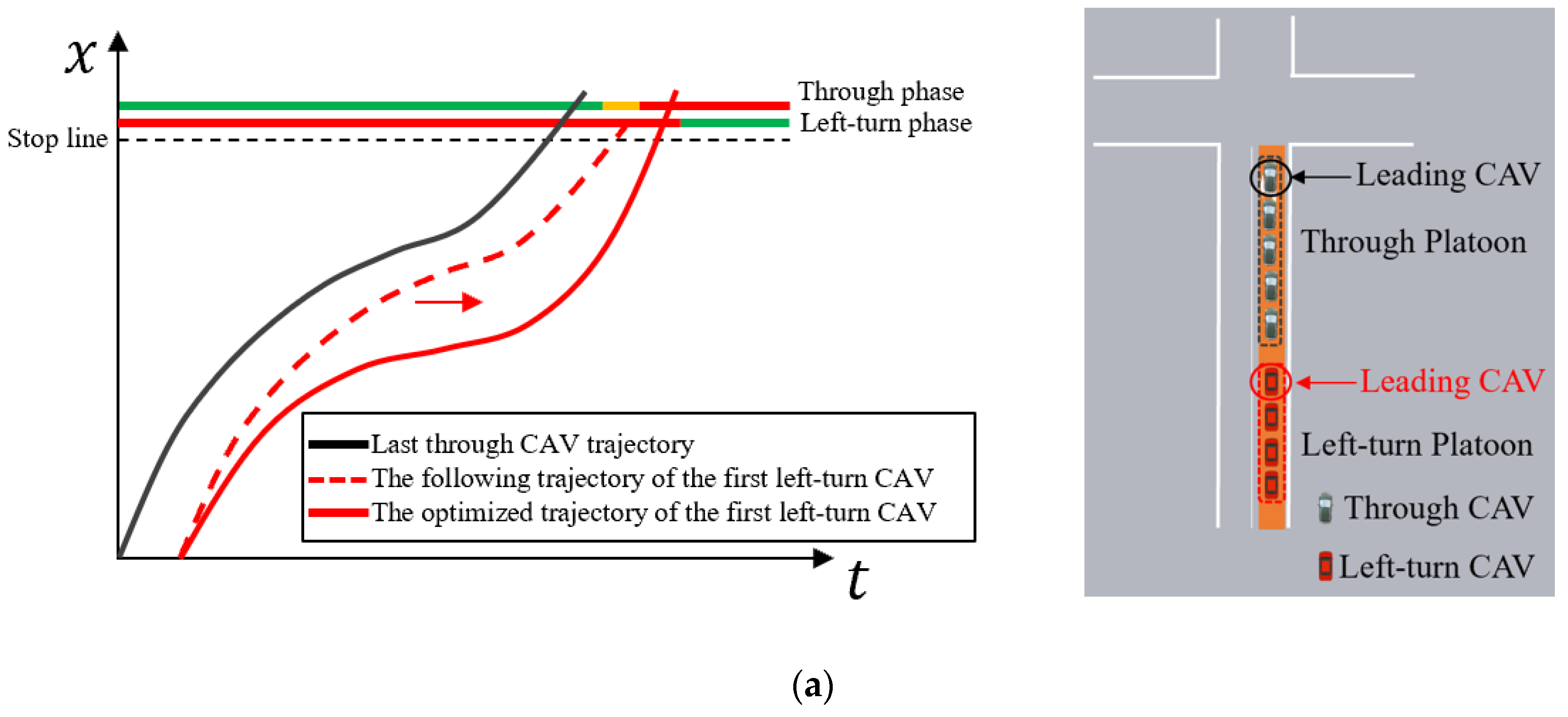
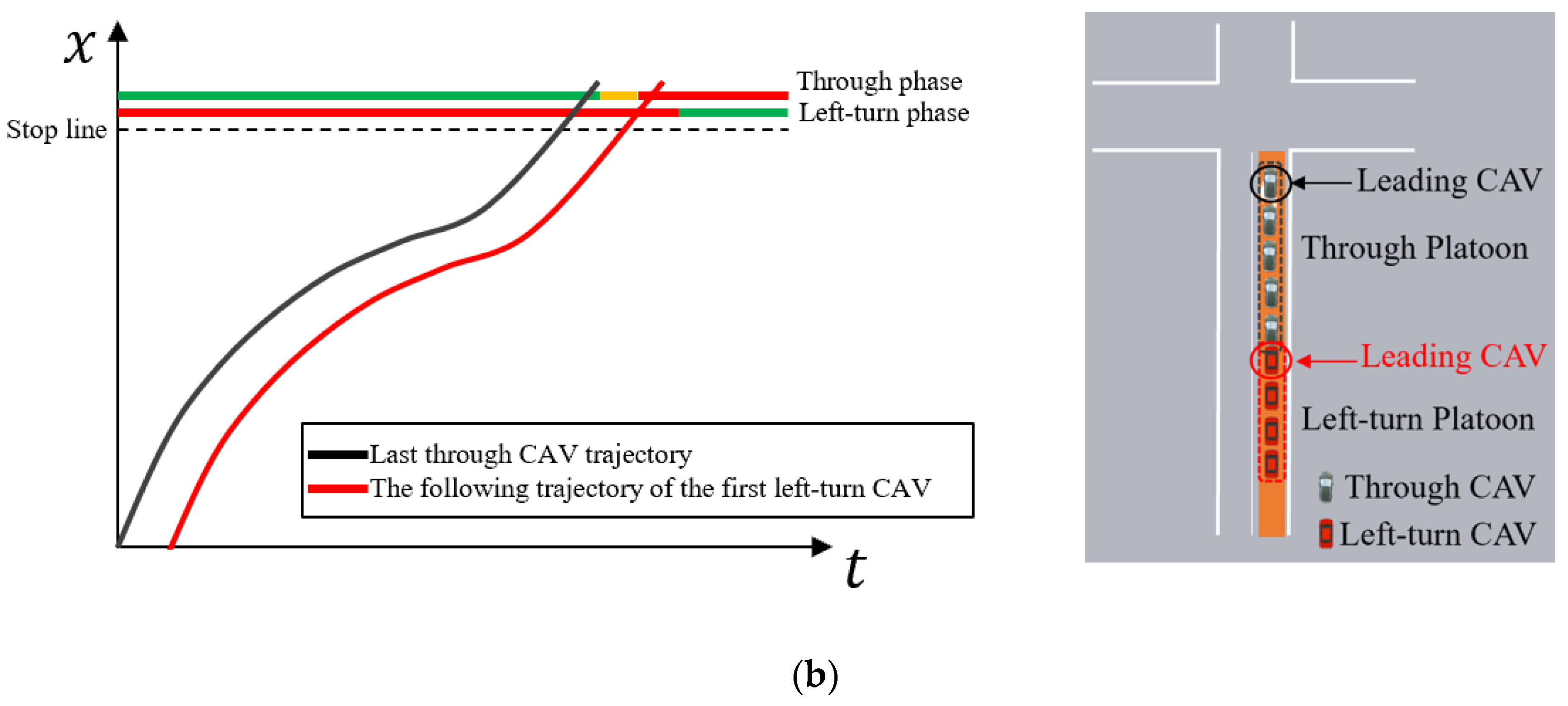
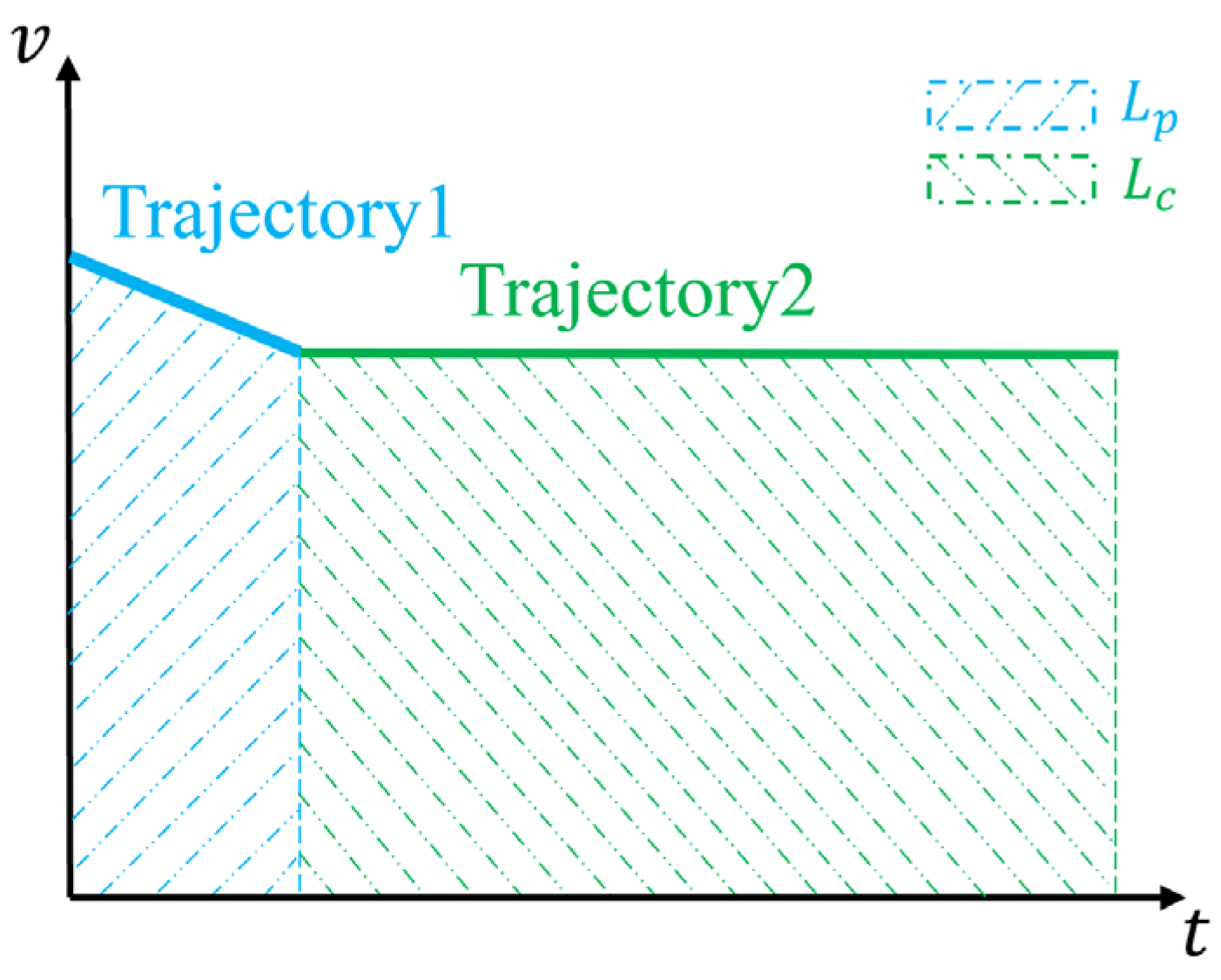
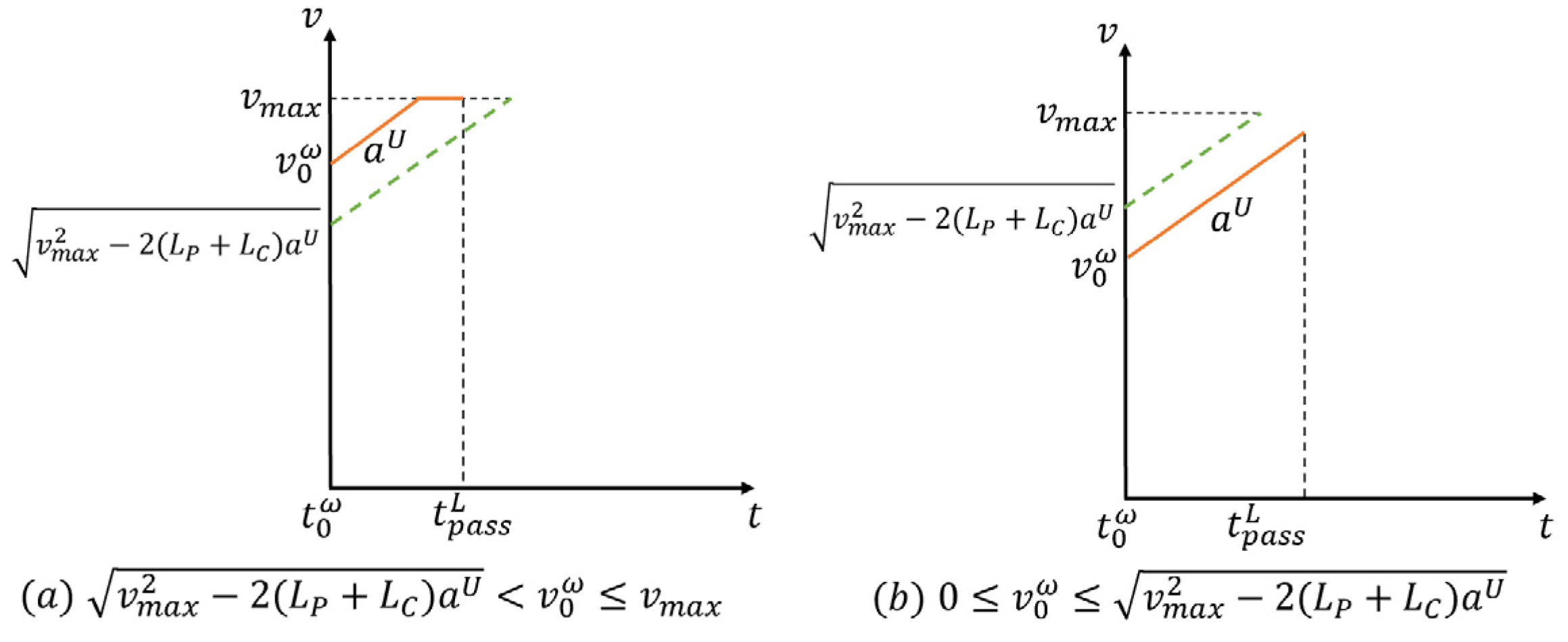
4.3.2. First Vehicle Trajectory Planning in the CAV Queue
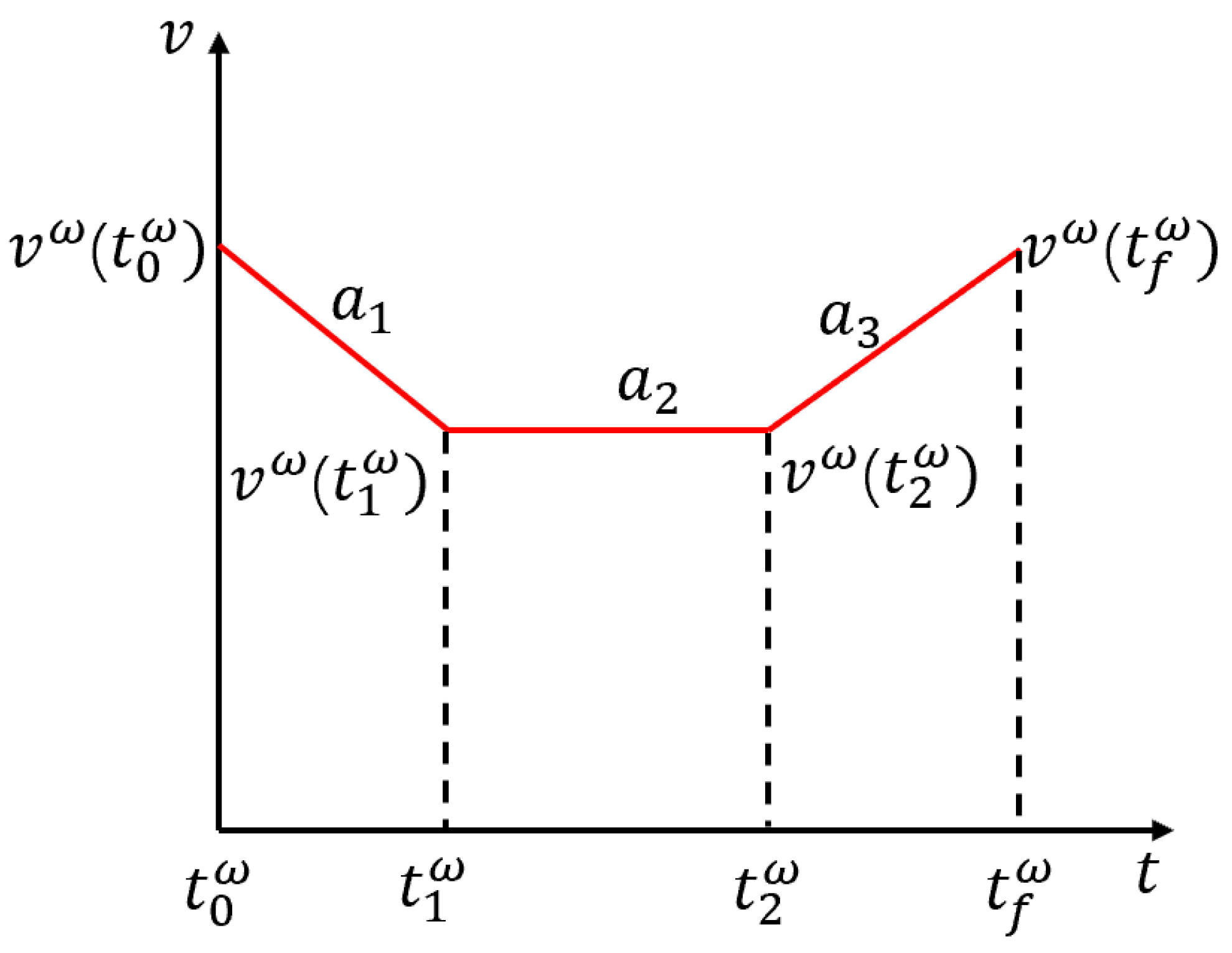
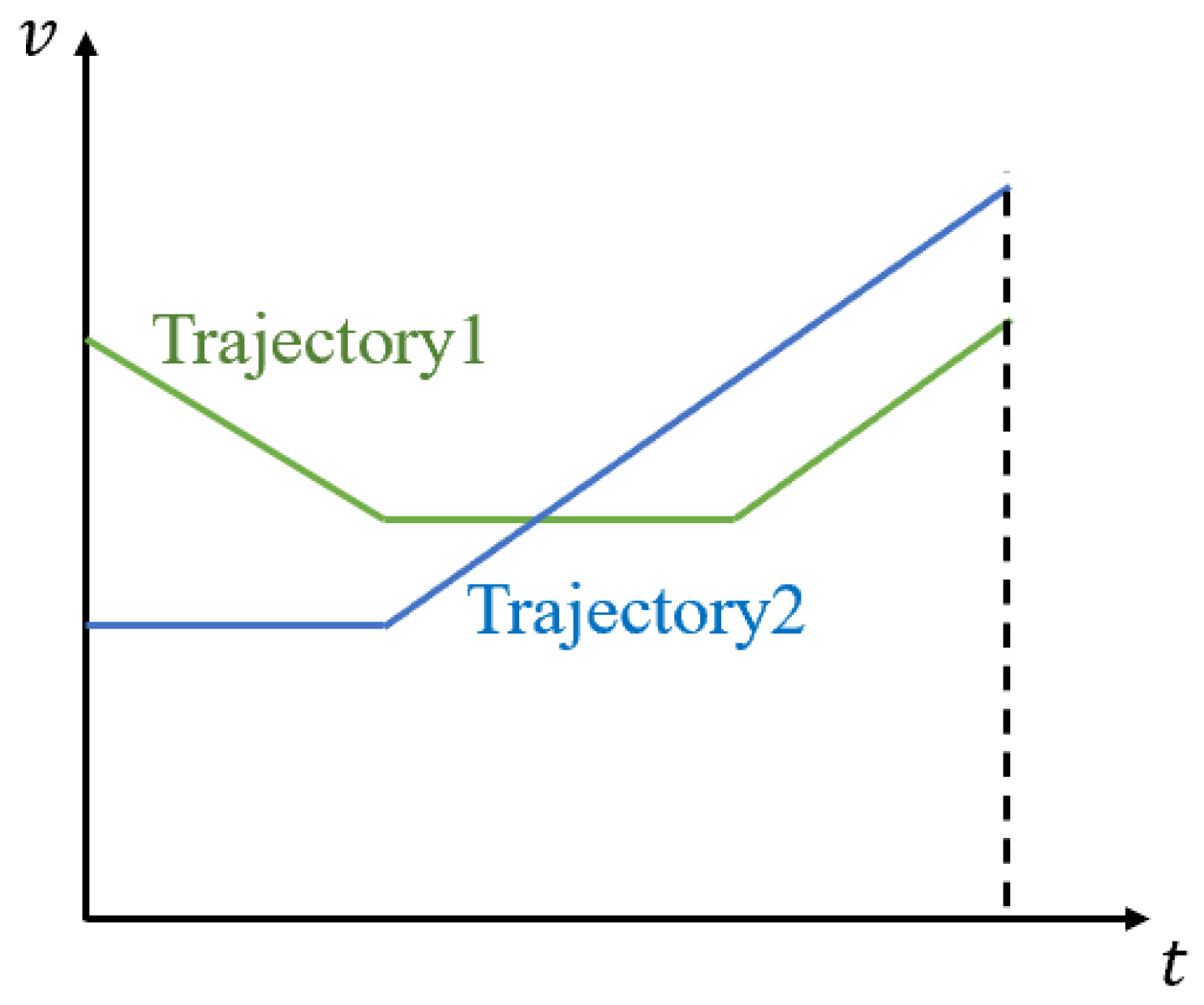
4.3.3. CAV Queue-Following Model
4.4. Determination of the Passing Zone Length
5. Simulation Study
5.1. Simulation Settings
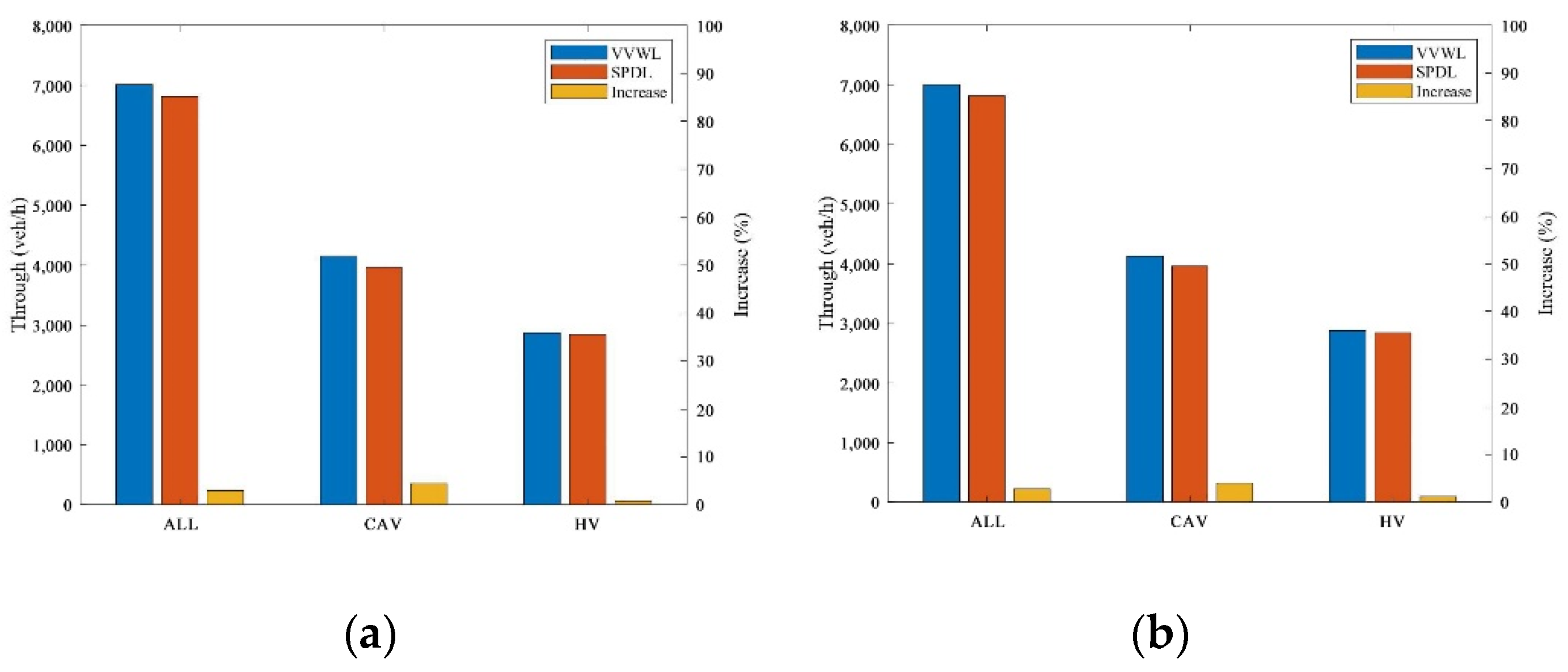
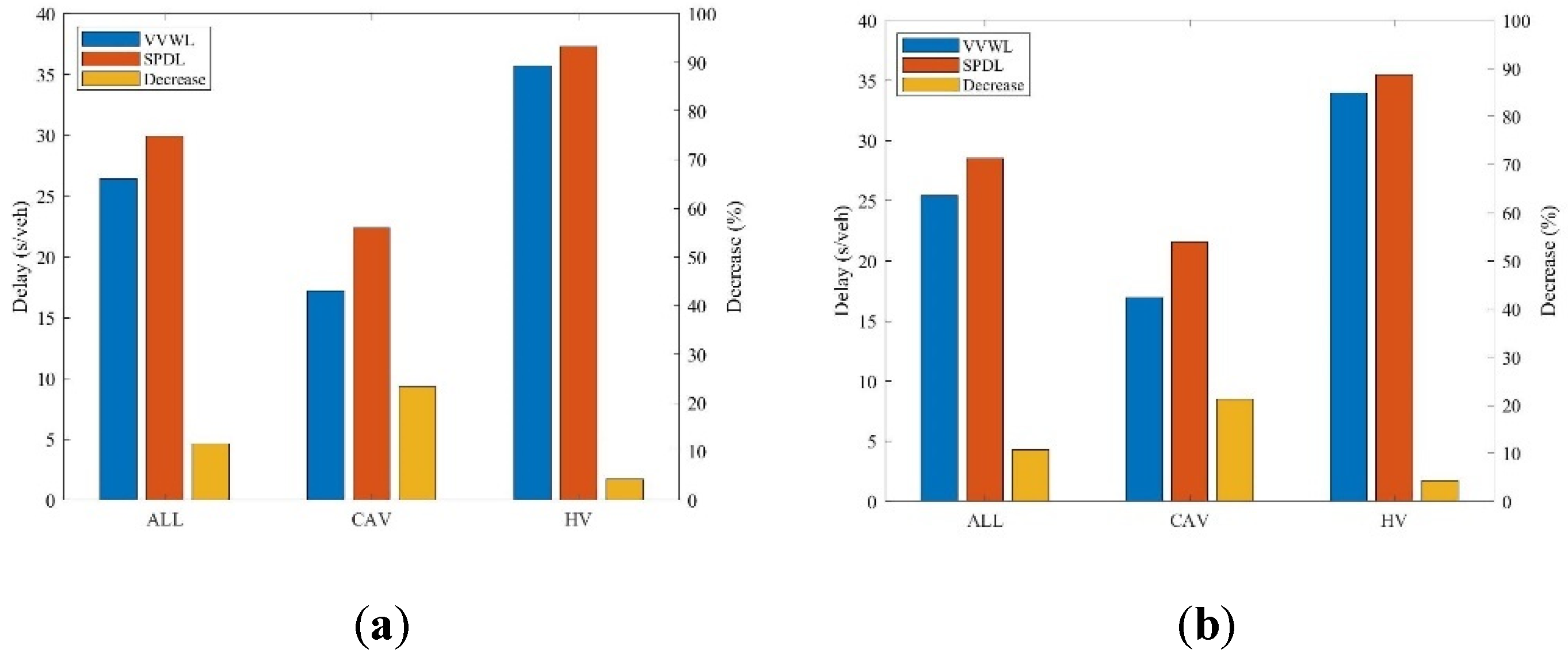
5.2. Simulation Results and Analysis
5.3. Sensitivity Analysis
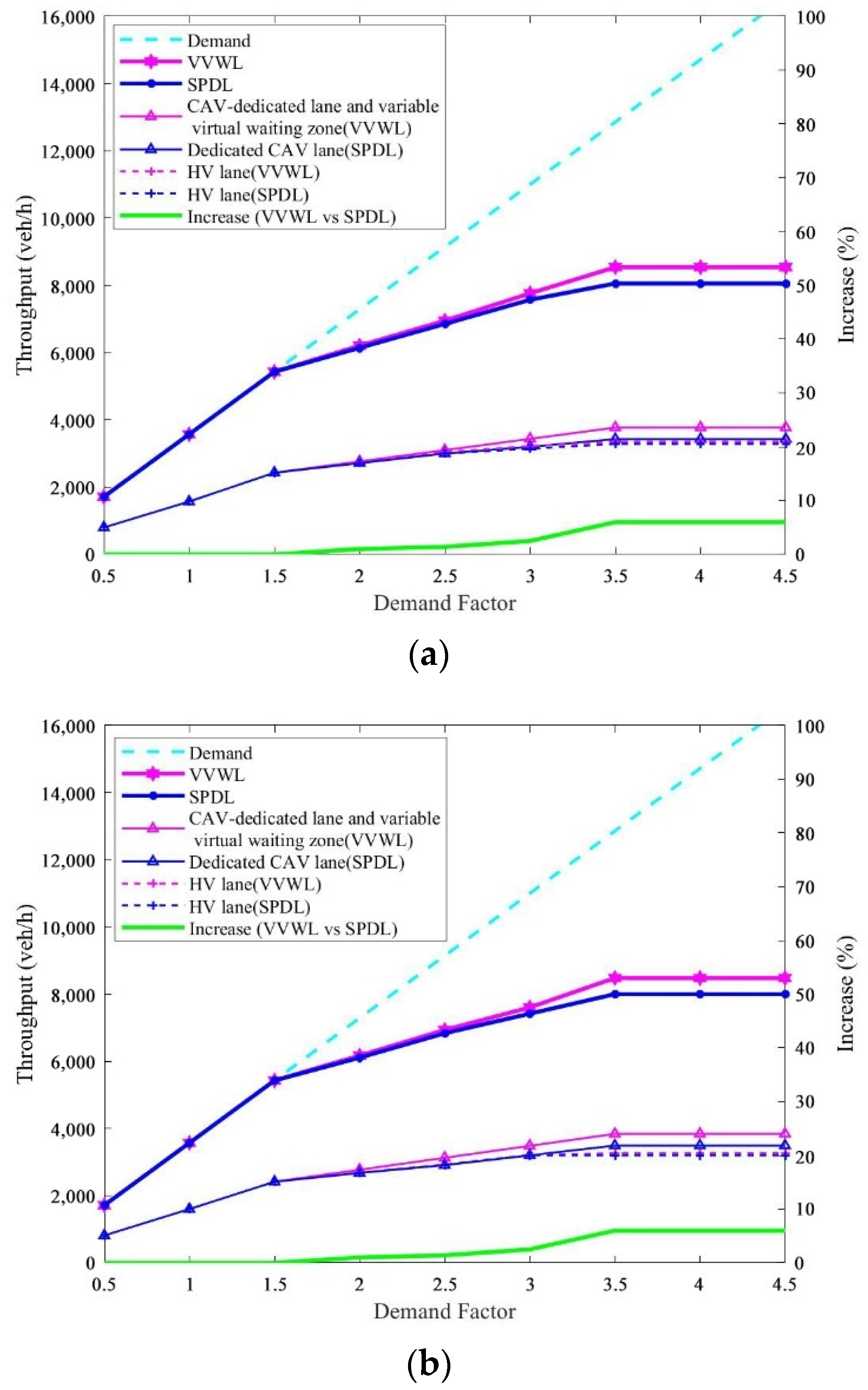
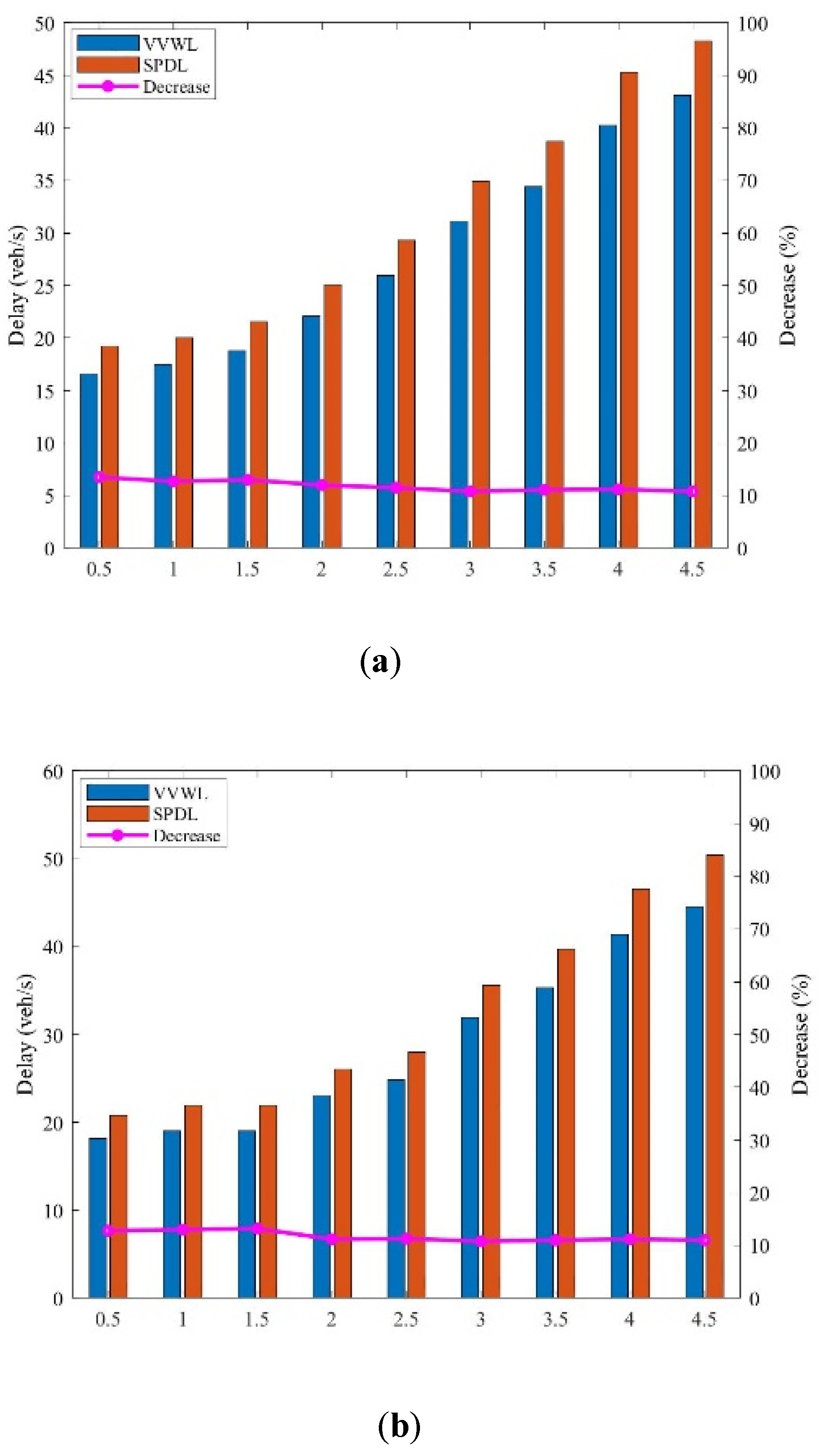
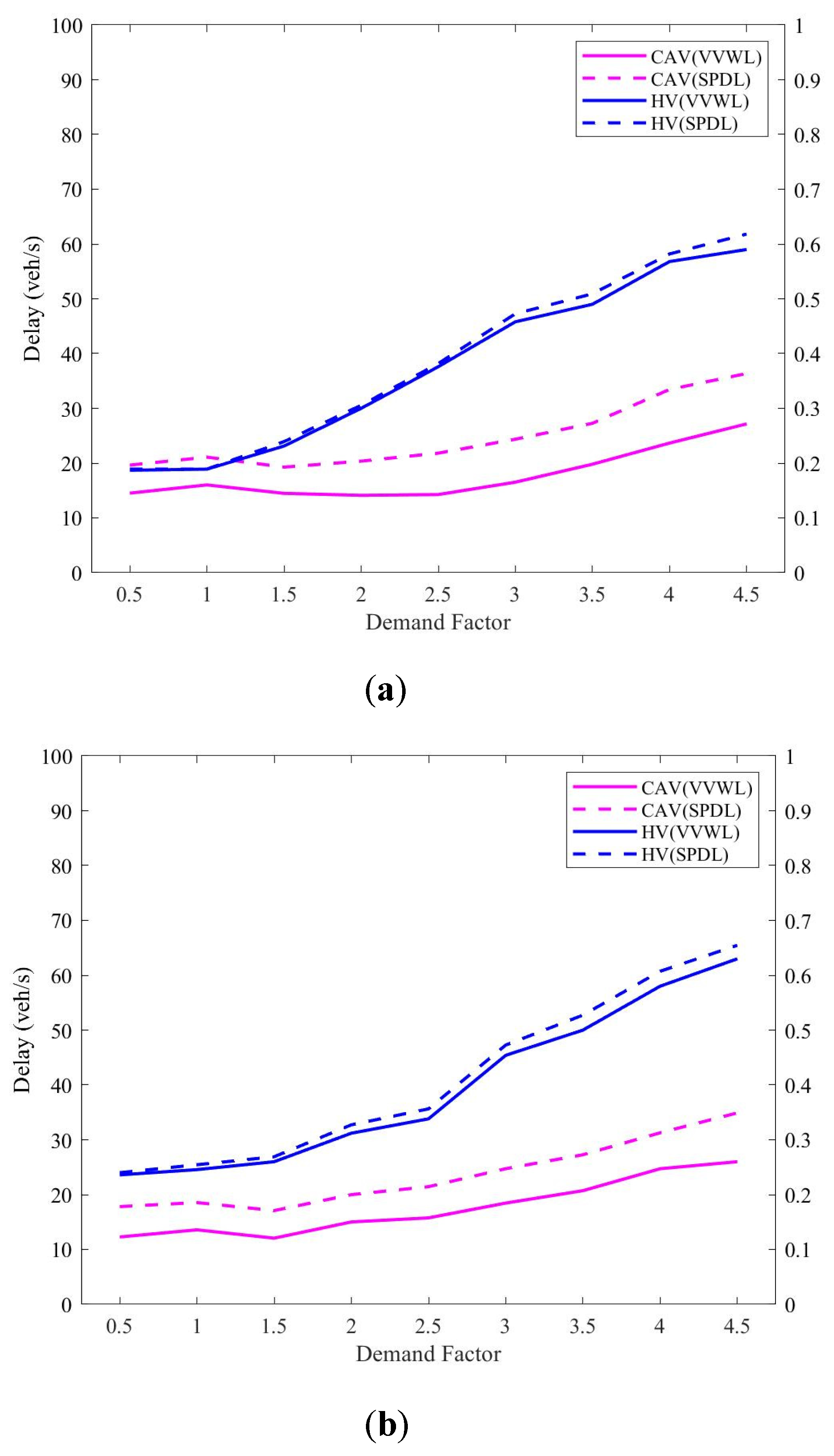
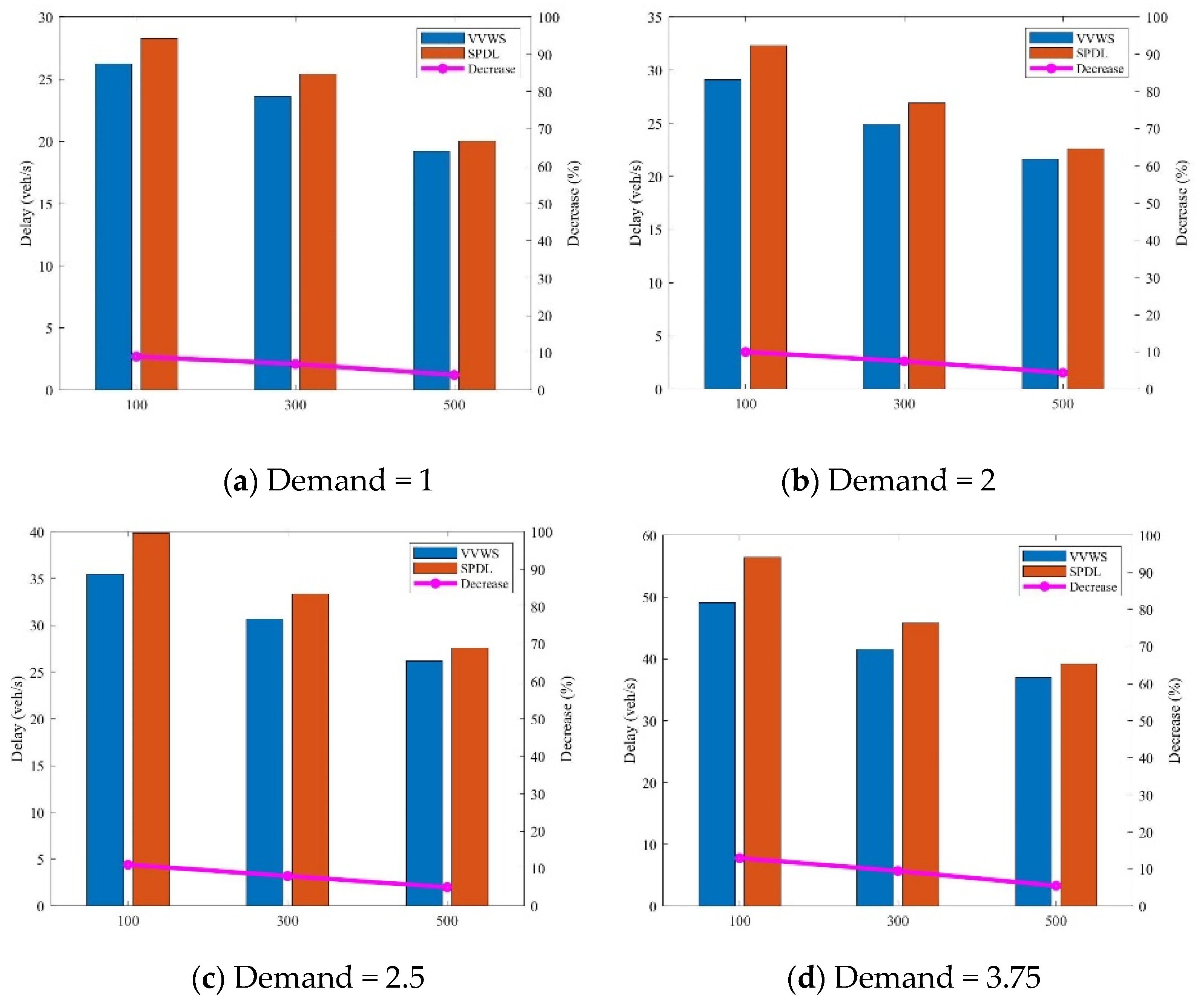
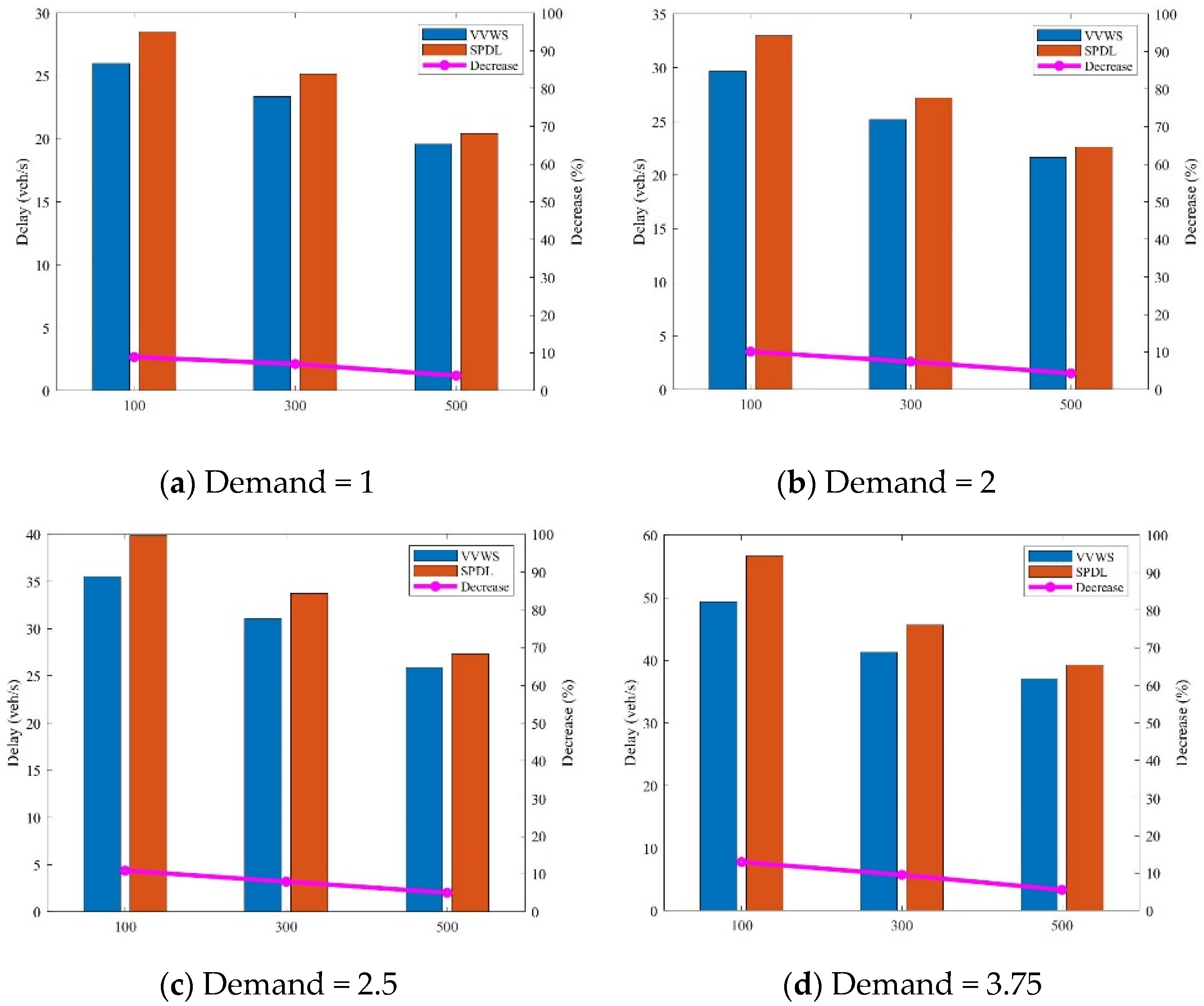
5.3.1. Oversaturation Demand Analysis
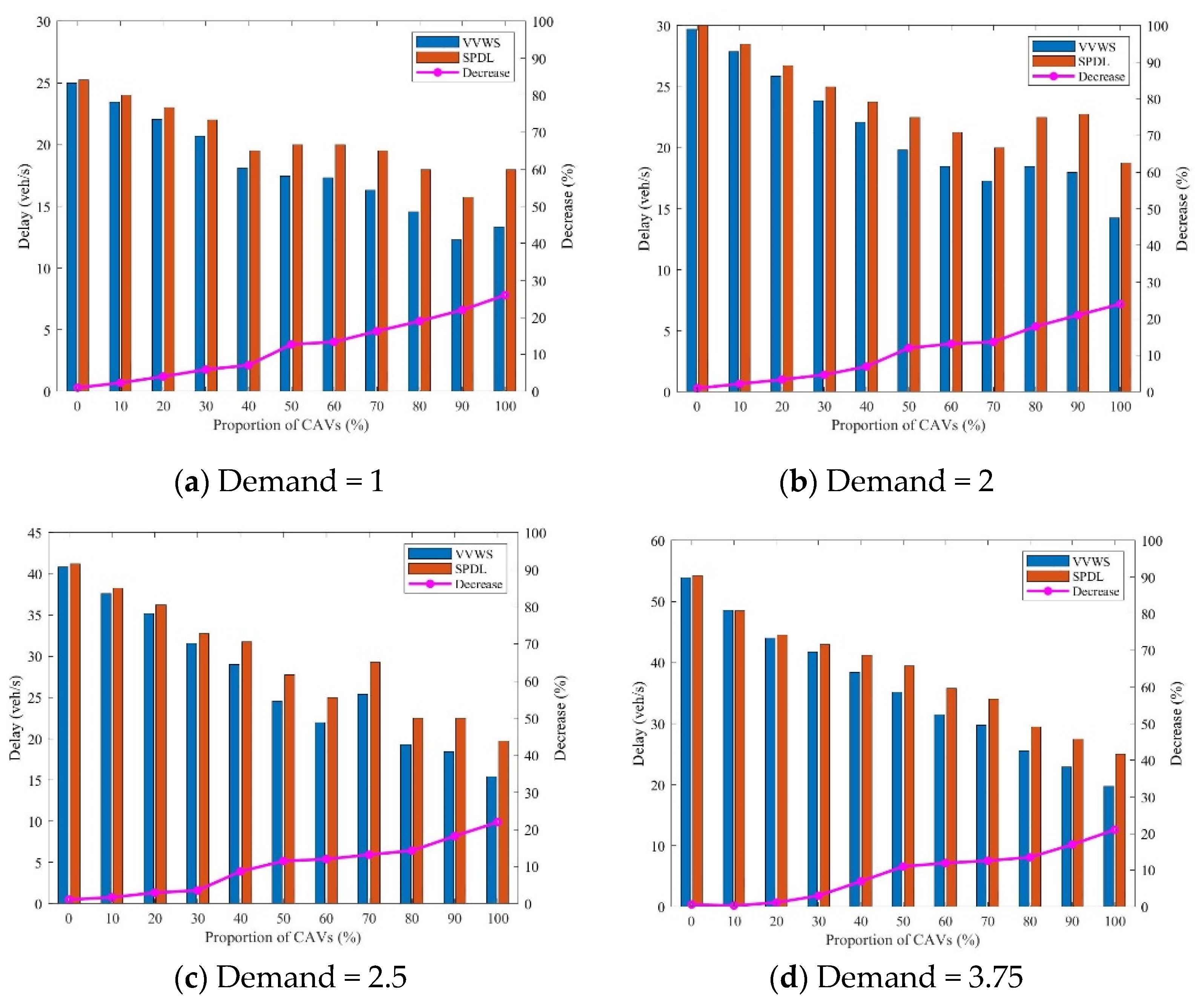
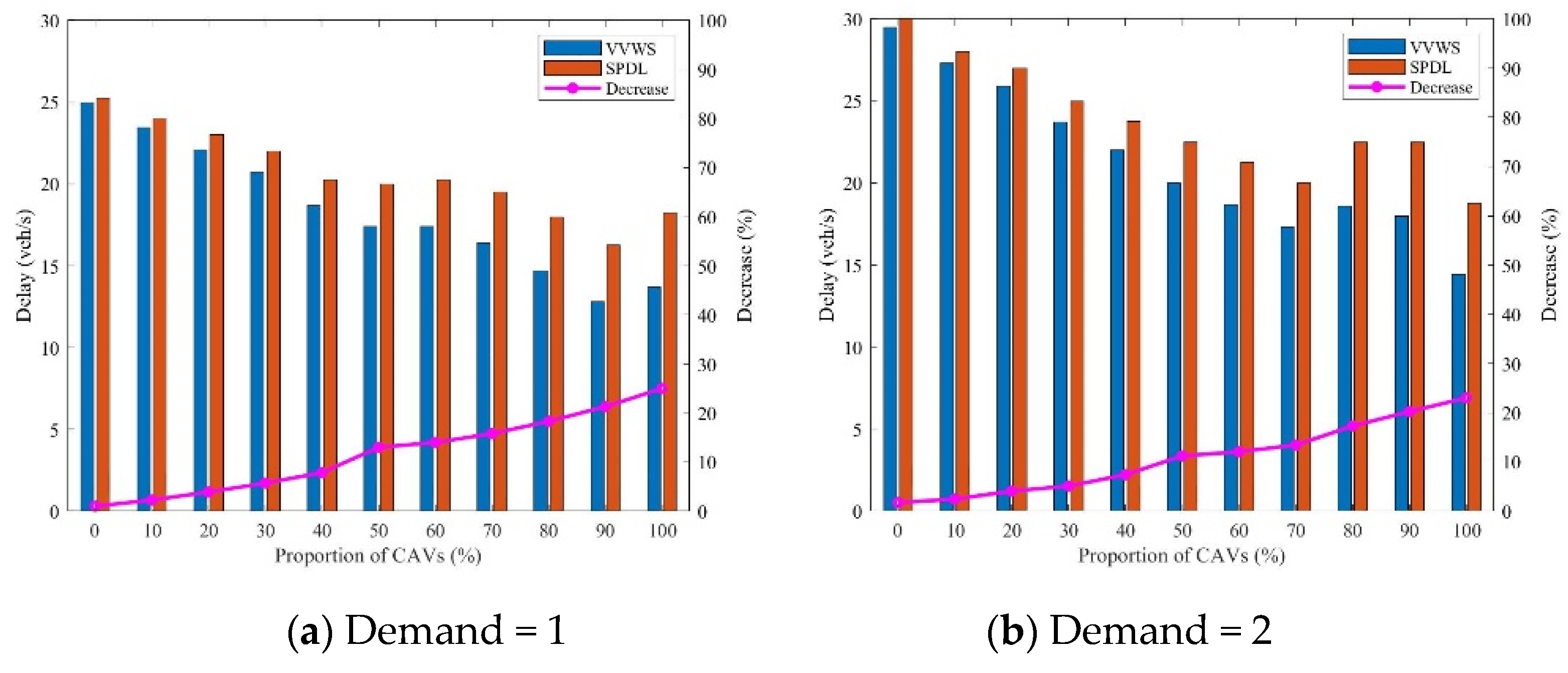
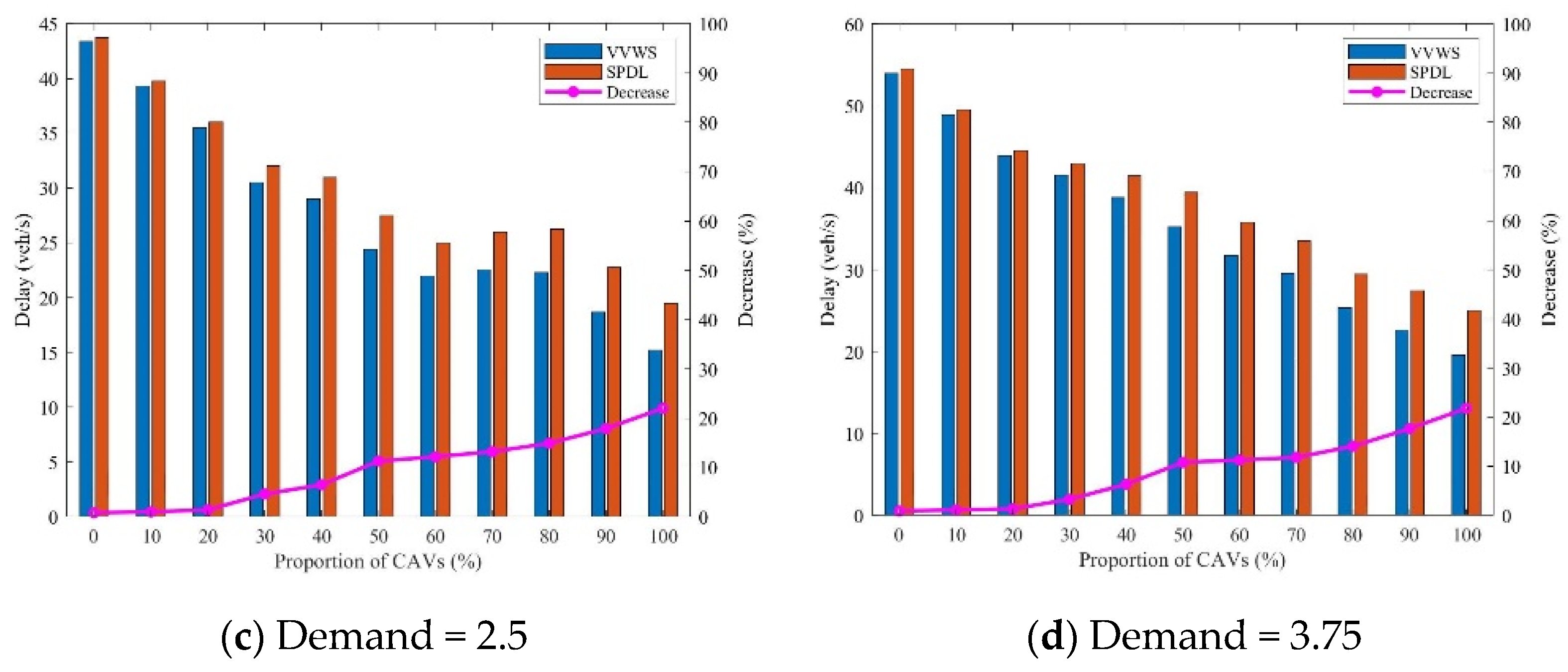
5.3.2. Analysis of CAV Permeability under Oversaturation
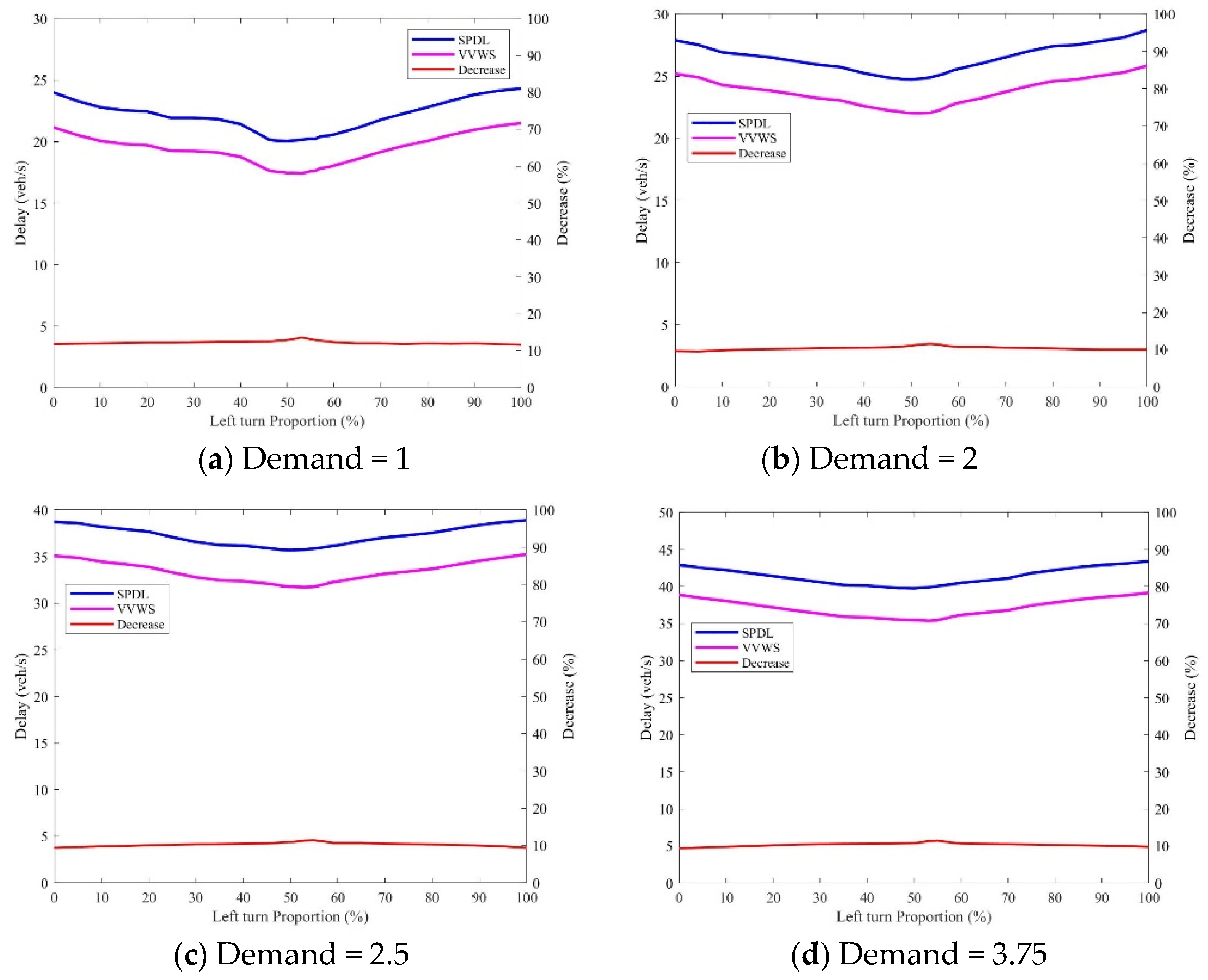
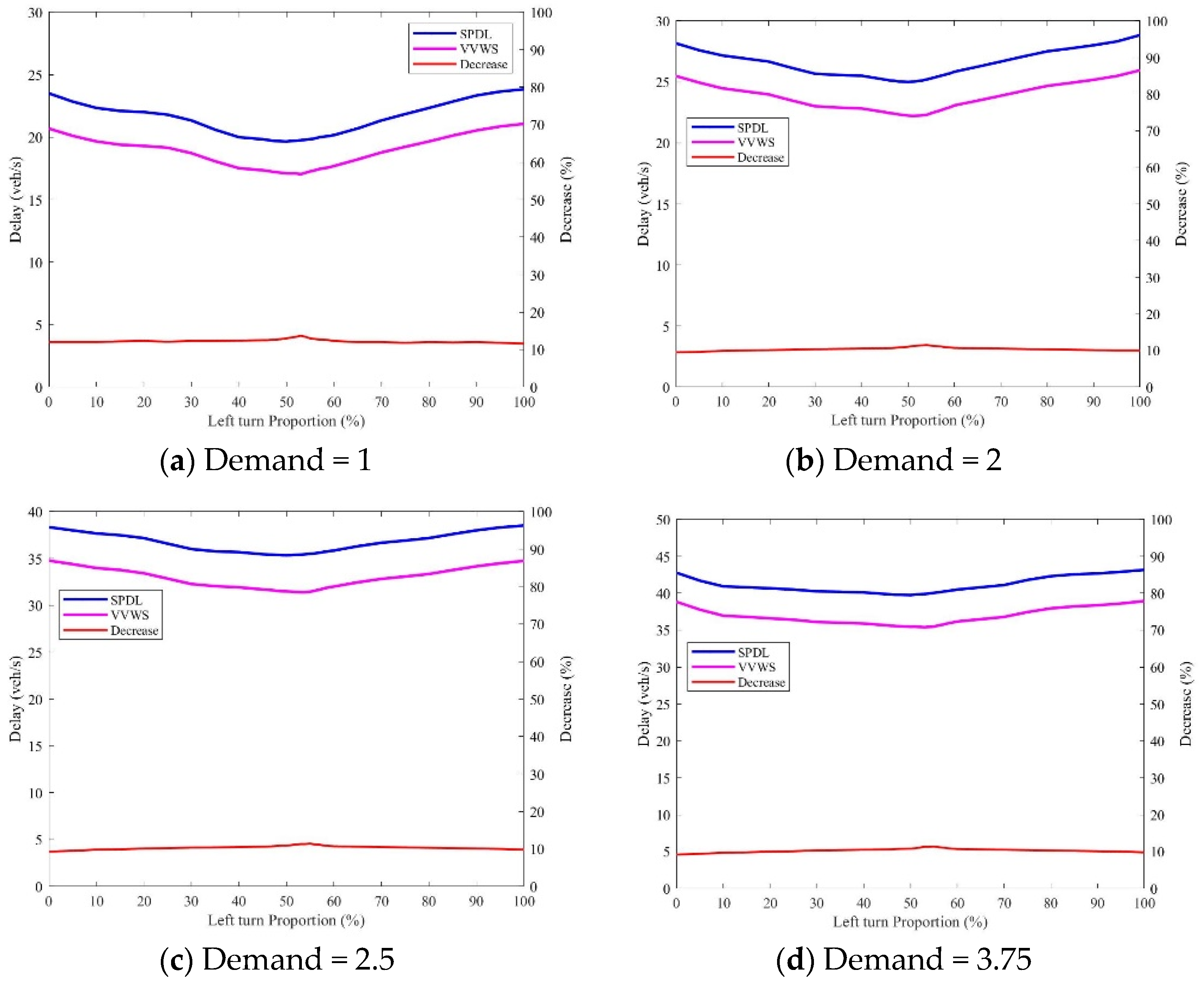
5.3.3. Analysis of CAV Share for Left Turns
5.3.4. Variable Virtual Waiting Zone Length Analysis
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Noaeen, M.; Mohajerpoor, R.; Far, B.H.; Ramezani, M. Real-time decentralized traffic signal control for congested urban networks considering queue spillbacks. Transp. Res. C Emerg. Technol. 2021, 113, 103407. [Google Scholar] [CrossRef]
- Li, Z.; Yu, H.; Zhang, G.; Dong, S.; Xu, C. Network-wide traffic signal control optimization using a multi-agent deep reinforcement learning. Transp. Res. C Emerg. Technol. 2021, 125, 103059. [Google Scholar] [CrossRef]
- Ren, Y.; Jiang, H.; Ji, N.; Yu, H. TBSM: A traffic burst-sensitive model for short-term prediction under special events. Knowl.-Based Syst. 2022, 240, 108120. [Google Scholar] [CrossRef]
- Kester, J. Insuring future automobility: A qualitative discussion of British and Dutch car insurer's responses to connected and automated vehicles. Res. Transp. Bus. Manag. 2022, 45, 100903. [Google Scholar] [CrossRef]
- Zheng, F.; Liu, C.; Liu, X.; Jabari, S.; Lu, l. Analyzing the impact of automated vehicles on uncertainty and stability of the mixed traffic flow. Transp. Res. C Emerg. Technol. 2020, 112, 203–219. [Google Scholar] [CrossRef]
- Ren, Y.; Jiang, H. Zhang, L.;Liu, R.; Yu, H. HD-RMPC: A Hierarchical Distributed and Robust Model Predictive Control Framework for Urban Traffic Signal Timing. J. Adv. Transp. 2022, 2022, 8131897. [Google Scholar] [CrossRef]
- Guo, Q.; Ban, X.; Aziz, H. Mixed traffic flow of human driven vehicles and automated vehicles on dynamic transportation networks. Transp. Res. C Emerg. Technol. 2021, 128, 103159. [Google Scholar] [CrossRef]
- Xu, P.; Li, W.; Hu, X.; Wu, H.; Li, J. Spatiotemporal analysis of urban road congestion during and post COVID-19 pandemic in Shanghai, China. Transp. Res. Interdiscip. Perspect. 2022, 13, 100555. [Google Scholar] [CrossRef] [PubMed]
- Rosero, F.; Fonseca, N.; López, J.; Casanova, J. Effects of passenger load, road grade, and congestion level on real-world fuel consumption and emissions from compressed natural gas and diesel urban buses. Appl. Energy. 2020, 282, 116–195. [Google Scholar] [CrossRef]
- Li, Y.; Xiong, W.; Wang, X. Does polycentric and compact development alleviate urban traffic congestion? A case study of 98 Chinese cities. Cities 2019, 88, 100–111. [Google Scholar] [CrossRef]
- Ma, W.; Li, J.; Yu, C. Shared-phase-dedicated-lane based intersection control with mixed traffic of human-driven vehicles and connected and automated vehicles. Transp. Res. C Emerg. Technol. 2022, 135, 103509. [Google Scholar] [CrossRef]
- Yang, C.; Chen, X.; Lin, X.; Li, M. Coordinated trajectory planning for lane-changing in the weaving areas of dedicated lanes for connected and automated vehicles. Transp. Res. C: Emerg. Technol. 2022, 144, 103864. [Google Scholar] [CrossRef]
- Zhao, X.; Gao, Y.; Jin, S.; Xu, Z.; Liu, Z.; Fan, W.; Liu, P. Development of a cyber-physical-system perspective based simulation platform for optimizing connected automated vehicles dedicated lanes. Expert Syst. Appl. 2022, 213, 118972. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T. Impact of dedicated lanes for connected and autonomous vehicle on traffic flow throughput. Phys. A Stat. Mech. Its Appl. 2018, 512, 588–597. [Google Scholar] [CrossRef]
- Jiang, Z.; Yu, D.; Luan, S.; Zhou, H.; Meng, F. Integrating traffic signal optimization with vehicle microscopic control to reduce energy consumption in a connected and automated vehicles environment. J. Clean. Prod. 2022, 371, 133694. [Google Scholar] [CrossRef]
- Datesh, J.; Scherer, W.T.; Smith, B.L. Using K-Means Clustering to Improve Traffic Signal Efficacy in an IntelliDrive SM Environment. In Proceedings of the IEEE Forum on Integrated and Sustainable Transportation Systems, Vienna, Austria, 29 June–1 July 2011; pp. 122–127. [Google Scholar]
- Feng, Y.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A real-time adaptive signal control in a connected vehicle environment. Transp. Res. C Emerg. Technol. 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Shaghaghi, E.; Jabbarpour, M.R.; Md Noor, R.; Yeo, H.; Jung, J.J. Adaptive green traffic signal controlling using vehicular communication. Frontiers of Information Technol. Electron. Eng. 2017, 18, 373–393. [Google Scholar] [CrossRef]
- Rey, D.; Levin, M.W. Blue phase: Optimal network traffic control for legacy and autonomous vehicles. Transp. Res. B Methodol. 2019, 130, 105–129. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Guler, S.; Gayah, V. Decentralized arterial traffic signal optimization with connected vehicle information. J. Intell. Transp. Syst. 2021, 27, 1990762. [Google Scholar] [CrossRef]
- Islam, S.; Hajbabaie, A.; Aziz, H. A real-time network-level traffic signal control methodology with partial connected vehicle information. Transp. Res. C Emerg. Technol. 2020, 121, 102830. [Google Scholar] [CrossRef]
- Yao, Z.; Zhao, B.; Yuan, T.; Jiang, H.; Jiang, Y. Reducing gasoline consumption in mixed connected automated vehicles environment: A joint optimization framework for traffic signals and vehicle trajectory. J. Clean. Prod. 2020, 265, 121836. [Google Scholar] [CrossRef]
- Zhang, L.; Yuan, Z.; Yang, L.; Liu, Z. Recent developments in traffic flow modeling using macroscopic fundamental diagram. Transp. Rev. 2020, 40, 529–550. [Google Scholar] [CrossRef]
- Kamal, M.; Imura, J.; Hayakawa, T.; Ohata, A.; Aihara, K. Traffic Signal Control in an MPC Framework Using Mixed Integer Programming. IFAC Proc. Vol. 2013, 46, 645–650. [Google Scholar] [CrossRef]
- Park, B.; Yun, I.; Ahn, K. Stochastic optimization for sustainable traffic signal control. Int. J. Sustain. Transp. 2009, 4, 263–284. [Google Scholar] [CrossRef]
- Wang, S.; Ahmed, N.; Yeap, T. Optimum Management of Urban Traffic Flow Based on a Stochastic Dynamic Model. IEEE Trans. Intell. Transp. Syst. 2019, 12, 4377–4389. [Google Scholar] [CrossRef]
- Huang, W.; Li, L.; Lo, H. Adaptive traffic signal control with equilibrium constraints under stochastic demand. Transp. Res. C Emerg. Technol. 2018, 95, 394–413. [Google Scholar] [CrossRef]
- Yan, Y.; Qu, X.; Li, H. On the design and operational performance of waiting areas in at-grade signalized intersections: An overview. Transp. A Transp. Sci. 2018, 14, 901–928. [Google Scholar] [CrossRef]
- Ren, Y.; Jiang, H.; Feng, X.; Zhao, Y.; Liu, R.; Yu, H. ACP-Based Modeling of the Parallel Vehicular crowd sensing system: Framework, components and an application example. IEEE Trans. Intell. Veh. 2022, 3221927. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, Z. Effects of the design of waiting areas on the dynamic behavior of queues at signalized intersections. Phys. A Stat. Mech. Its Appl. 2018, 509, 181–195. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, P.; Tian, Z.; Wang, W. Effects of left-turn waiting areas on capacity and level of service of signalized intersections. J. Transp. Eng. 2013, 139, 1076–1085. [Google Scholar] [CrossRef]
- Ma, W.; Liu, Y.; Zhao, J.; Wu, N. Increasing the capacity of signalized intersections with left-turn waiting areas. Transp. Res. A. 2017, 105, 181–196. [Google Scholar] [CrossRef]
- Jiang, X.; Zhang, G.; Zhou, Y.; Xia, L.; He, Z. Safety assessment of signalized intersections with through-movement waiting area in China. Saf. Sci. 2017, 95, 28–37. [Google Scholar] [CrossRef]
- Jiang, X.; Zhang, G.; Bai, W.; Fan, W. Safety evaluation of signalized intersections with left-turn waiting area in China. Accid. Anal. Prev. 2016, 95, 461–469. [Google Scholar] [CrossRef] [Green Version]
- Qin, Z.; Shao, H.; Wang, F.; Feng, Y.; Shen, L. A reliable energy consumption path finding algorithm for electric vehicles considering the correlated link travel speeds and waiting times at signalized intersections. Sustain. Energy Grids Netw. 2022, 32, 100877. [Google Scholar] [CrossRef]
- Amouzadi, M.; Orisatoki, M.; Dizqah, A. Lane-free crossing of cavs through intersections as a minimum-time optimal control problem. IFAC-PapersOnLine 2022, 55, 28–33. [Google Scholar] [CrossRef]
- Rad, S.; Farah, H.; Taale, H.; Arem, B.; Hoogendoorn, S. Design and operation of dedicated lanes for connected and automated vehicles on motorways: A conceptual framework and research agenda. Transp. Res. C Emerg. Technol. 2020, 117, 102664. [Google Scholar]
- Chalaki, B.; Malikopoulos, A.A. Optimal control of connected and automated vehicles at multiple adjacent intersections. IEEE Trans. Control. Syst. Technol. 2021, 3, 972–984. [Google Scholar] [CrossRef]
- Yu, C.; Sun, W.; Liu, H.X.; Yang, X. Managing connected and automated vehicles at isolated intersections: From reservation to optimization-based methods. Transp. Res. Part B Methodol. 2019, 122, 416–435. [Google Scholar] [CrossRef]
- Tajeddin, S.; Ekhtiari, S.; Faieghi, M.; Azad, N.L. Ecological adaptive Cruise control with optimal lane selection in connected vehicle environments. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4538–4549. [Google Scholar] [CrossRef]
- Li, M.; Wu, X.; He, X.; Yu, G.; Wang, Y. An eco-driving system for electric vehicles with signal control under V2X environment. Transp. Res. C Emerg. Technol. 2018, 93, 335–350. [Google Scholar] [CrossRef]
- Zhao, W.; Ngoduy, D.; Shepherd, S.; Liu, R.; Papageorgiou, M. A platoon based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalised intersection. Transp. Res. C Emerg. Technol. 2018, 95, 802–821. [Google Scholar] [CrossRef] [Green Version]
- Malikopoulos, A.; Cassandras, C.; Zhang, Y. A decentralized energy-optimal control framework for connected automated vehicles at signal-free intersections. Automatica 2018, 93, 244–256. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Yu, C.; Yang, X. Trajectory planning for connected and automated vehicles at isolated signalized intersections under mixed traffic environment. Transp. Res. C Emerg. Technol. 2021, 130, 103309. [Google Scholar] [CrossRef]
- Wan, N.; Vahidi, A.; Luckow, A. Optimal speed advisory for connected vehicles in arterial roads and the impact on mixed traffic. Transp. Res. C Emerg. Technol. 2016, 69, 548–563. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, C.; Liu, H. Spatiotemporal intersection control in a connected and automated vehicle environment. Transp. Res. C Emerg. Technol. 2018, 89, 364–383. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traffic Demand in pcu/h | |||||
|---|---|---|---|---|---|
| Left-Turn | Through | Right-Turn | |||
| CAV | HV | CAV | HV | ||
| Arm 1 | 200 | 200 | 200 | 200 | 100 |
| Arm 2 | 200 | 200 | 200 | 200 | 100 |
| Arm 3 | 200 | 200 | 200 | 200 | 100 |
| Arm 4 | 200 | 200 | 200 | 200 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Wang, J.; Ren, Y.; Chen, S.; Dong, C. Signal Control Study of Oversaturated Heterogeneous Traffic Flow Based on a Variable Virtual Waiting Zone in Dedicated CAV Lanes. Appl. Sci. 2023, 13, 3054. https://doi.org/10.3390/app13053054
Yu H, Wang J, Ren Y, Chen S, Dong C. Signal Control Study of Oversaturated Heterogeneous Traffic Flow Based on a Variable Virtual Waiting Zone in Dedicated CAV Lanes. Applied Sciences. 2023; 13(5):3054. https://doi.org/10.3390/app13053054
Chicago/Turabian StyleYu, Haiyang, Jixiang Wang, Yilong Ren, Siqi Chen, and Chenglin Dong. 2023. "Signal Control Study of Oversaturated Heterogeneous Traffic Flow Based on a Variable Virtual Waiting Zone in Dedicated CAV Lanes" Applied Sciences 13, no. 5: 3054. https://doi.org/10.3390/app13053054