
Study of Applicability of Triangular Impulse Response Function for Ultimate Strength of LNG Cargo Containment Systems under Sloshing Impact Loads


Abstract
:1. Introduction
2. Failure Modes of NO96-Type LNG CCS
- (1)
- A shear failure of the cover plate of the primary box;
- (2)
- A sending failure of the cover plate of the primary box;
- (3)
- A crushing failure of the plates at the bulkhead intersections;
- (4)
- A buckling failure of the primary and the secondary bulkhead plates.
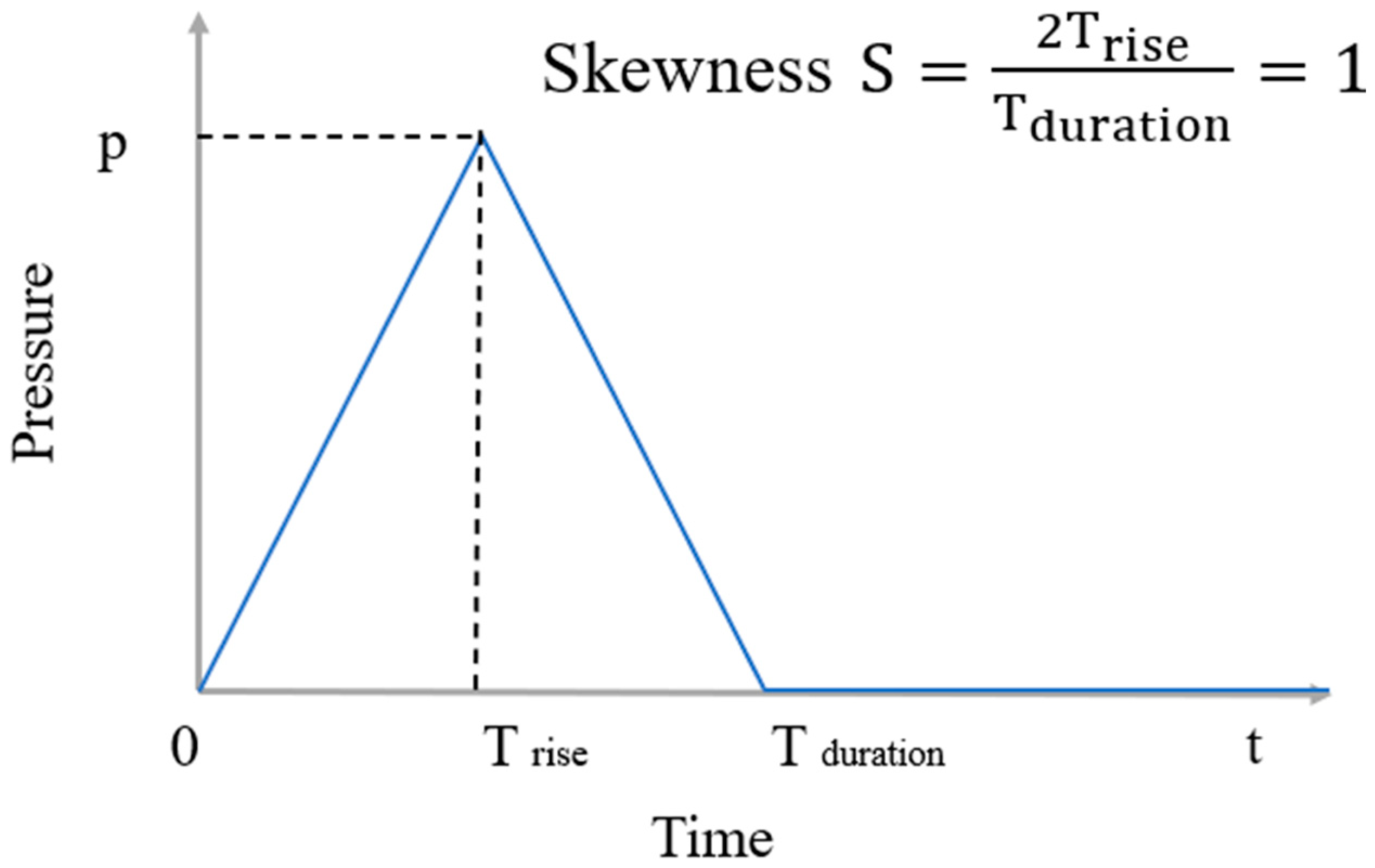
3. Triangular Impulse Response Function (TIRF)
4. FE Model Nonlinearities
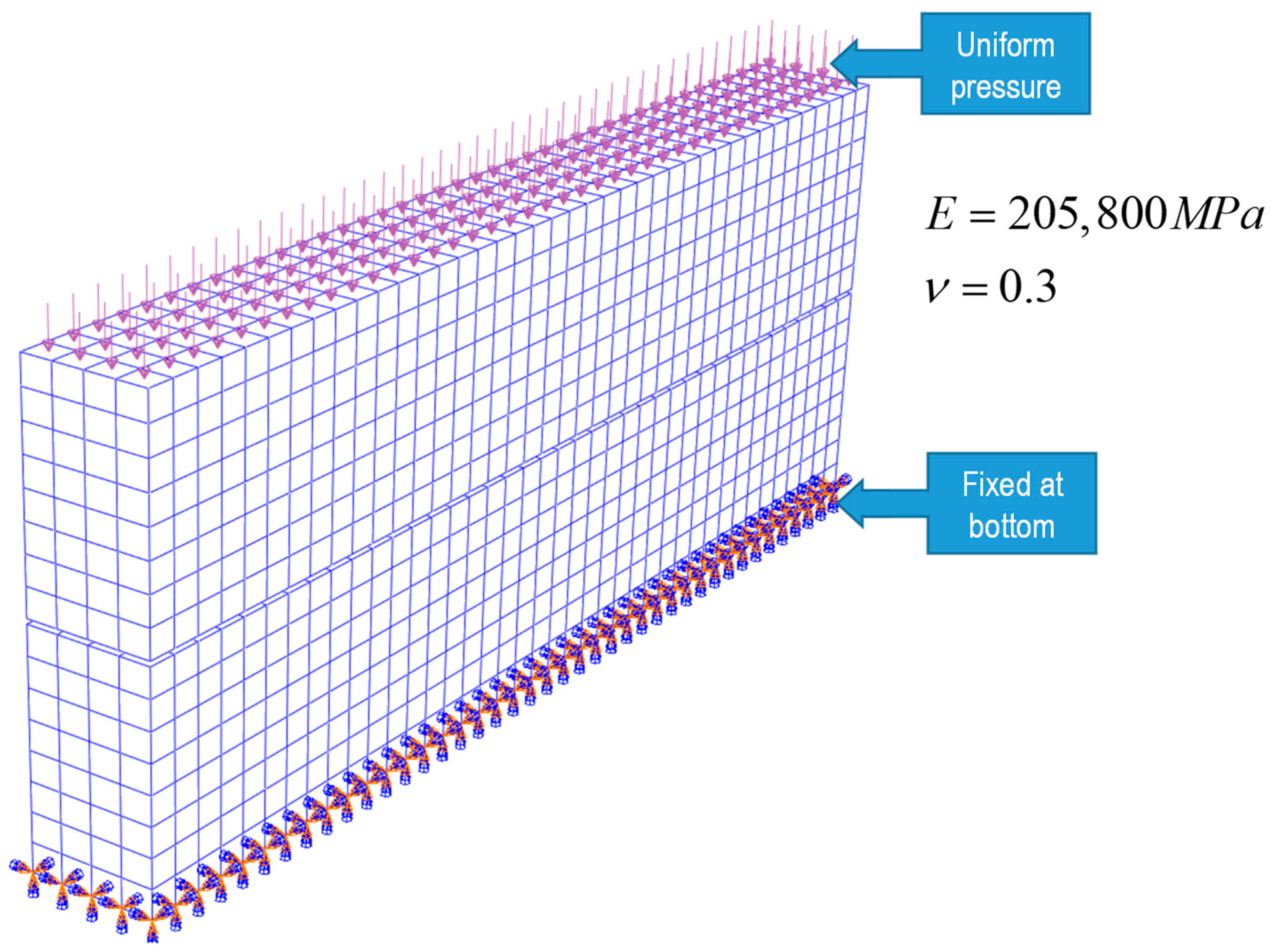
5. FE Models
6. Result of Case Studies
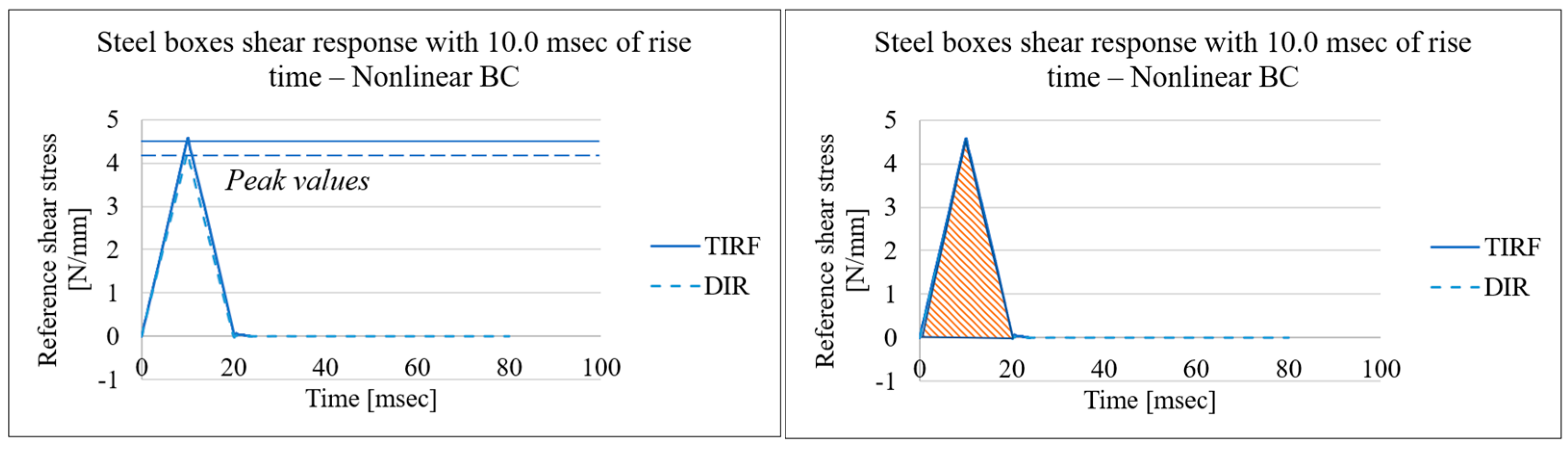
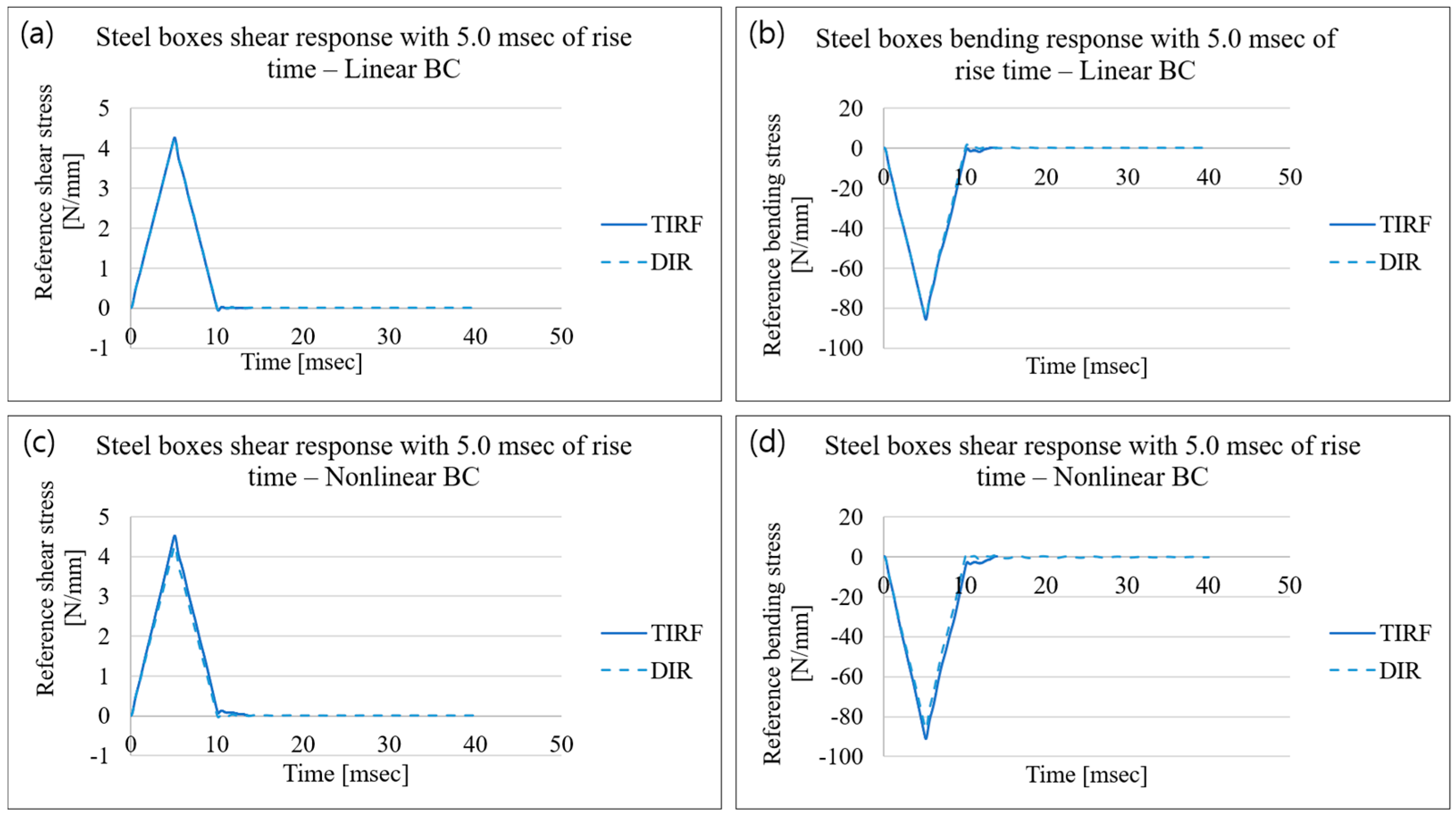
6.1. Model 1—Steel Boxes
6.2. Model 2—LNG Cargo Containment Boxes Only
6.3. Model 3—LNG Cargo Containment Boxes with Hull Structure
7. Development of Design Ultimate Dynamic Shear and Bending Strength Using the TIRF Approach and Discussion
8. Conclusions Remarks
- In Model 1with the steel boxes, the dynamic shear and bending responses using the TIRF and DIR, including the linear and nonlinear boundary conditions, were almost identical to each other in terms of peak pressure and impulse values;
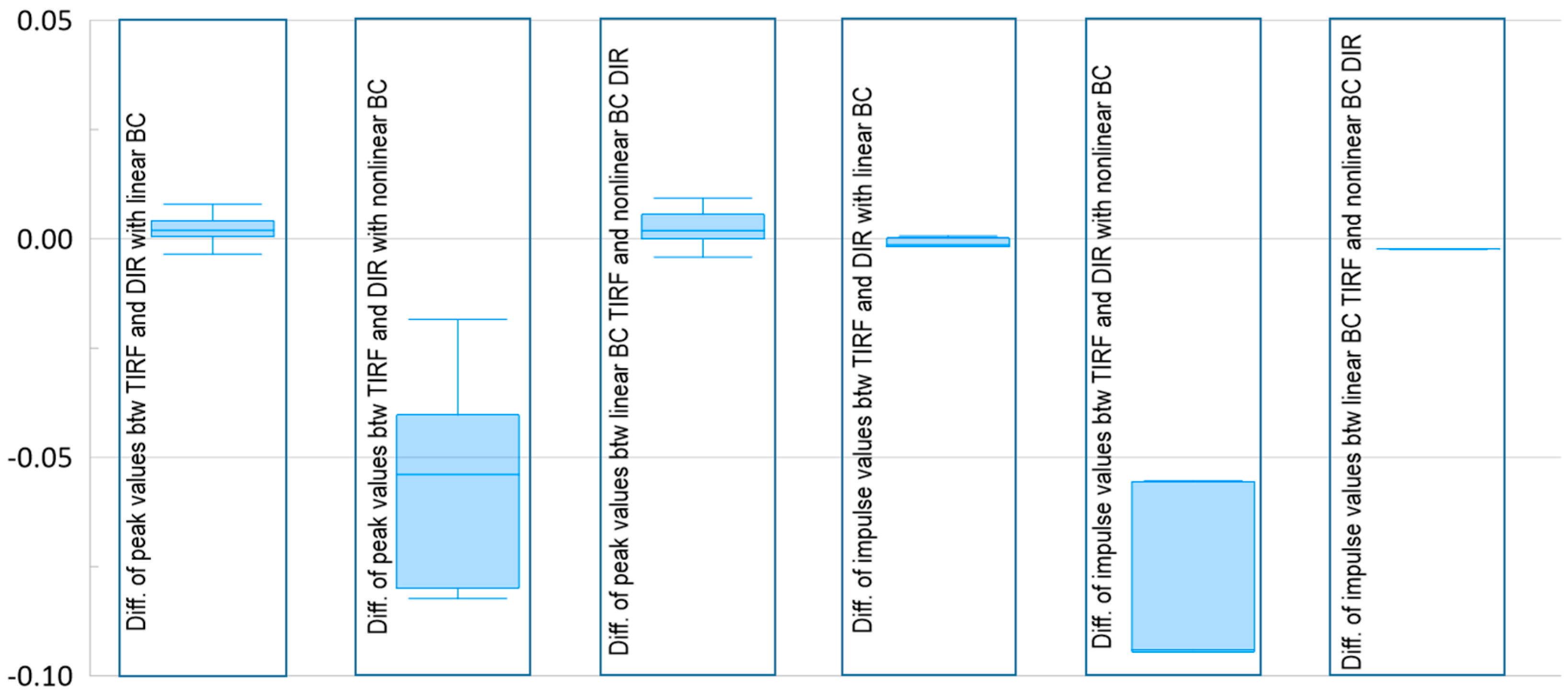
- In Model 2 with the LNG cargo containment boxes, the dynamic shear and bending responses using the TIRF and DIR, including the linear and nonlinear boundary conditions, also matched comparatively well in terms of peak pressure and impulse values. However, the differences in the peak pressure and impulse in Model 2, using the TIRF and DIR, were found to be relatively higher than those in Model 1;
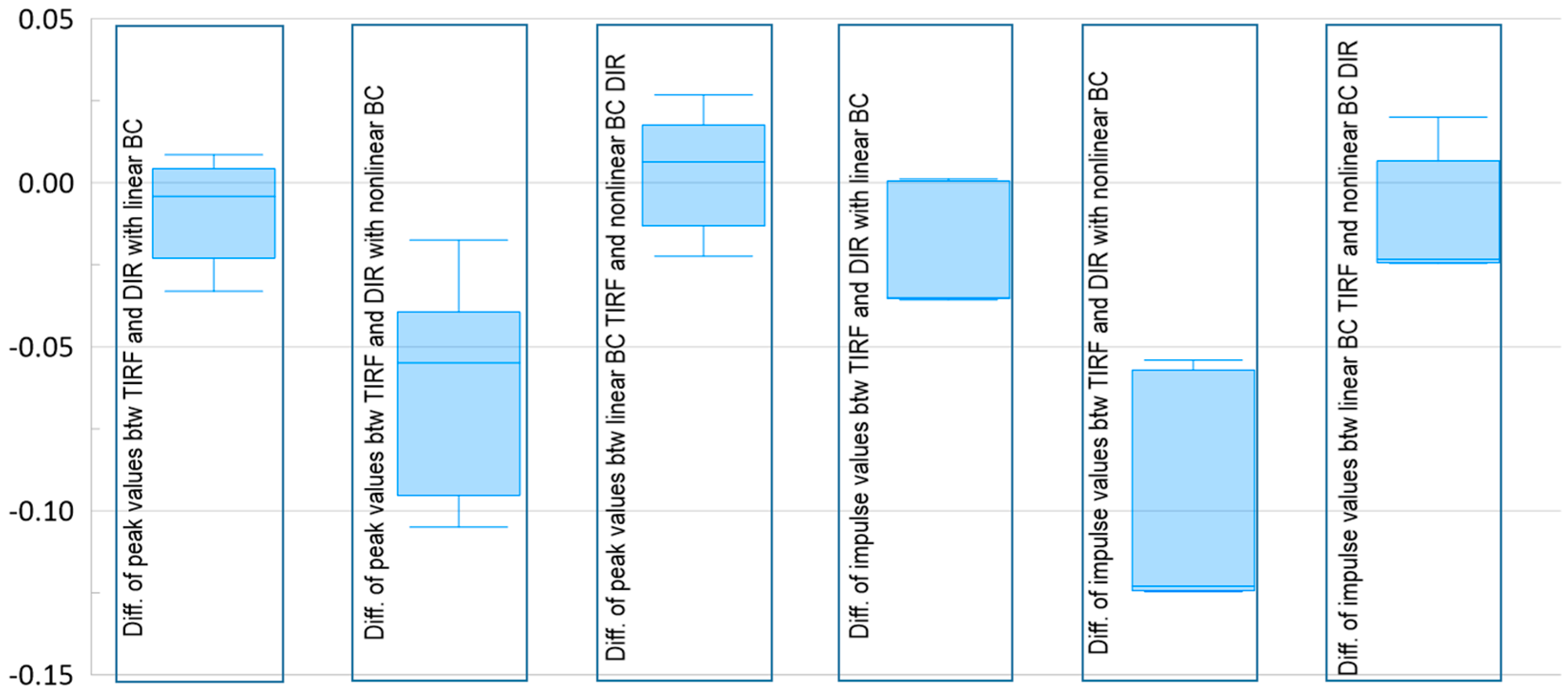
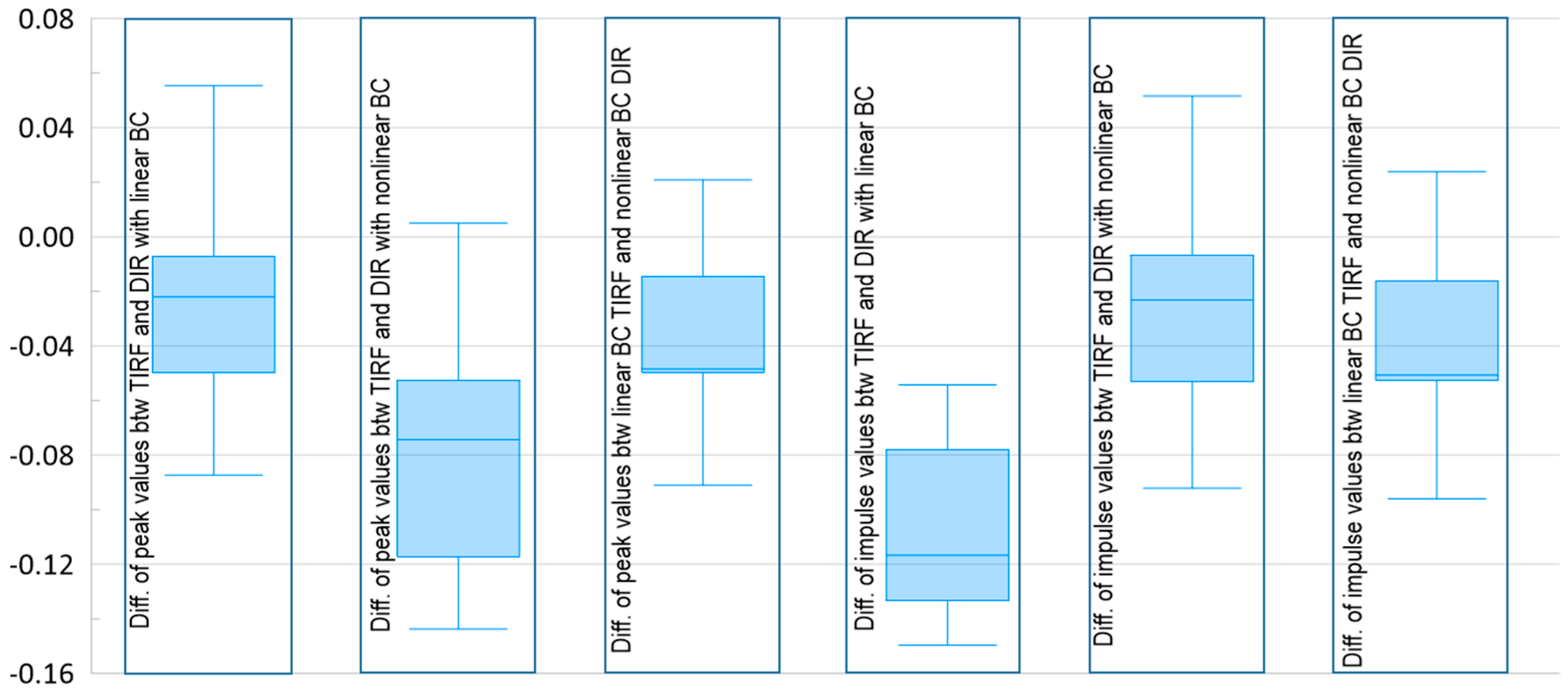
- In Model 3, in which the hull structure was additionally included as an onboard condition, the differences in the dynamic shear and bending responses using the TIRF and DIR were found to be relatively large compared to those of Model 1 and Model 2 owing to an additional nonlinear boundary effect originating from hull deflections. However, the overall results showed good agreement with each other. The maximum difference in the peak shear response and bending response was 6.1% and 20.9%, respectively;
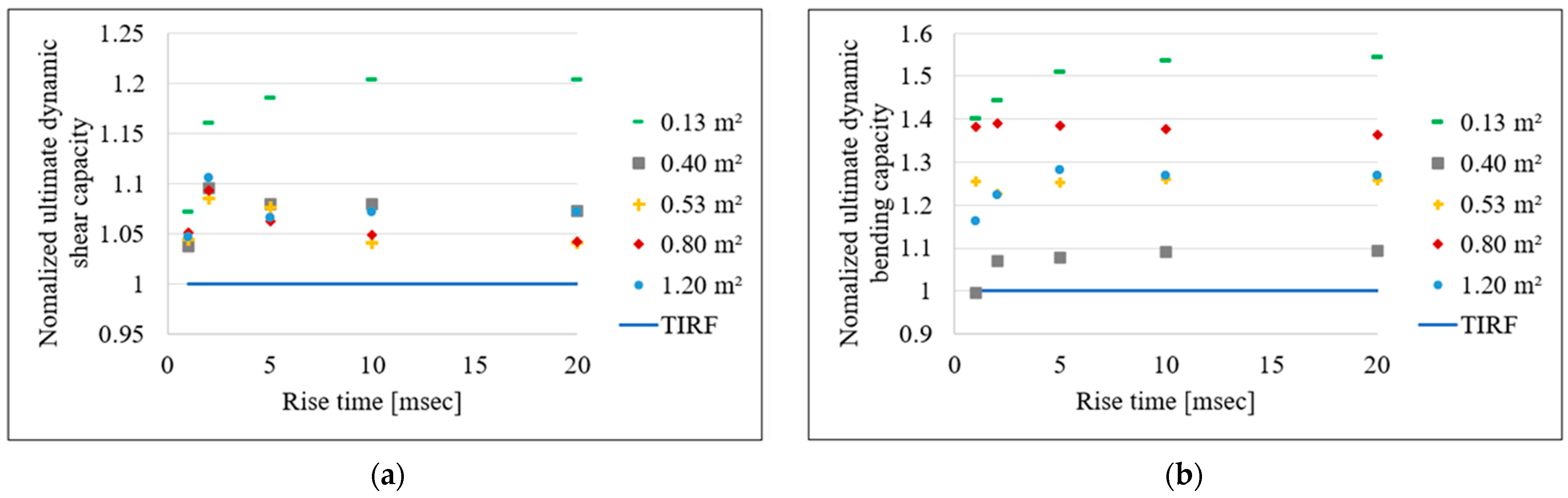
- The design of partial material safety factors for calculating the design dynamic shear and bending capacities of an LNG cargo containment system are proposed based on the statistical analysis results from current series FE assessments;
- Finally, the ultimate shear and bending capacities were calculated using the method proposed in this study and the results were compared with those obtained through direct nonlinear FE simulations. It showed conservative results against direct nonlinear FE simulations;
- In this study, a simple design method based on 5h3 TIRF is presented to design the LNG cargo containment system for use in the early design stage. However, the current study was limited to the GTT NO96-type LNG cargo containment system and further study of the GTT MARK III-type system is required.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Park, Y.I.; Kim, J. Artificial neural network based prediction of ultimate buckling strength of liquid natural gas cargo containment system under sloshing loads considering onboard boundary conditions. Ocean Eng. 2022, 249, 110981. [Google Scholar] [CrossRef]
- Lu, Y.; Zhou, T.; Cheng, L.; Zhao, W.; Jiang, H. Dependence of critical filling level on excitation amplitude in a rectangular sloshing tank. Ocean Eng. 2018, 156, 500–511. [Google Scholar] [CrossRef]
- Xue, M.A.; Zheng, J.; Lin, P.; Yuan, X. Experimental study on vertical baffles of different configurations in sup-pressing sloshing pressure. Ocean Eng. 2017, 136, 178–189. [Google Scholar] [CrossRef]
- Zhang, C.; Su, P.; Ning, D. Hydrodynamic study of an anti-sloshing technique using floating foams. Ocean Eng. 2019, 175, 62–70. [Google Scholar] [CrossRef]
- Ahn, Y.; Kim, Y.; Kim, S. Database of model-scale sloshing experiment for LNG tank and application of artificial neural network for sloshing load prediction. Mar. Struct. 2019, 66, 66–82. [Google Scholar] [CrossRef]
- Pilloton, C.; Bardazzi, A.; Colagrossi, A.; Marrone, S. SPH method for long-time simulations of sloshing flows in LNG tanks. Eur. J. Mech. B Fluids 2022, 93, 65–92. [Google Scholar] [CrossRef]
- Xue, M.A.; Jiang, Z.; Hu, Y.A.; Yuan, X. Numerical study of porous material layer effects on mitigating sloshing in a membrane LNG tank. Ocean Eng. 2020, 218, 108240. [Google Scholar] [CrossRef]
- Ding, S.; Wang, G.; Luo, Q. Study on sloshing simulation in the independent tank for an ice-breaking LNG carrier. Int. J. Nav. Archit. Ocean Eng. 2020, 12, 667–679. [Google Scholar] [CrossRef]
- Tang, Y.Y.; Liu, Y.D.; Chen, C.; Chen, Z.; He, Y.P.; Zheng, M.M. Numerical study of liquid sloshing in 3D LNG tanks with unequal baffle height allocation schemes. Ocean Eng. 2021, 234, 109181. [Google Scholar] [CrossRef]
- Bureau Veritas. Strength Assessment of LNG Membrane Tanks under Sloshing Loads. BV Guidance Note. 2011. Available online: https://erules.veristar.com/dy/data/bv/pdf/564-NI_2011-05.pdf (accessed on 1 September 2022).
- Det Norske Veritas 2009, Sloshing Analysis of LNG Membrane Tanks. DNV Classification Notes No.30.9. Available online: https://rules.dnv.com/docs/pdf/dnvpm/cn/2006-06/cn30-9.pdf (accessed on 1 September 2022).
- Kim, J.W.; Kim, K. Response-based evaluation of design sloshing loads for membrane-type LNG carriers. In Proceedings of the 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; pp. 1–9. [Google Scholar]
- Kim, Y. Rapid response calculation of LNG cargo containment system under sloshing load using wavelet transformation. Int. J. Nav. Archit. Ocean Eng. 2013, 5, 227–245. [Google Scholar] [CrossRef] [Green Version]
- Nho, I.S.; Ki, M.; Kim, S. A study on Simplified Sloshing Impact Response Analysis for Membrane-Type LNG Cargo Containment System. J. Soc. Nav. Archit. Korea 2011, 48, 451–456. [Google Scholar] [CrossRef] [Green Version]
- Det Norske Veritas 2016, DNVGL-CG-0158, 2016, Sloshing Analysis of LNG Membrane Tanks, Class Guideline. Available online: https://global.ihs.com/doc_detail.cfm?document_name=DNVGL%2DCG%2D0158&item_s_key=00672076 (accessed on 1 September 2022).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 9 mm | 12 mm | |||
|---|---|---|---|---|
| 20 °C | −163 °C | 20 °C | −163 °C | |
| [Nmm/mm] | 1100 | 935 | 1850 | 1580 |
| [Nmm/mm] | 760 | 650 | 1380 | 1180 |
| [N/mm] | 59 | 59 | 79 | 79 |
| [N/mm] | 43 | 43 | 58 | 58 |
| Model ID | Models | Geometric Nonlinearity | Boundary Nonlinearity | Assessment Approach | Load Area | Rise Time |
|---|---|---|---|---|---|---|
| Model 1 | Steel boxes (1) | Large deflection theory | Linear | TIRF | Full load (6) | 1 ms, 2 ms, 5 ms, 10 ms, 20 ms |
| DIR (5) | Full load (6) | |||||
| Nonlinear (4) | TIRF | Full load (6) | ||||
| DIR (5) | Full load (6) | |||||
| Model 2 | CCS (2) | Linear | TIRF | 12 cases (7) | ||
| DIR (5) | 12 cases (7) | |||||
| Nonlinear (4) | TIRF | 12 cases (7) | ||||
| DIR (5) | 12 cases (7) | |||||
| Model 3 | CCS + Hull (3) | Linear | TIRF | 12 cases (7) | ||
| DIR (5) | 12 cases (7) | |||||
| Nonlinear (4) | TIRF | 12 cases (7) | ||||
| DIR (5) | 12 cases (7) |
| Parameter | Temperature | |
|---|---|---|
| 20 °C | −163 °C | |
| Em,1 [MPa] | 9450 | 13,200 |
| Em,2 [MPa] | 8000 | 11,200 |
| Em,3 [MPa] | 820 | 1800 |
| Gm,12 [MPa] | 790 | 2900 |
| Gm,13 [MPa] | 325 | 700 |
| Gm,23 [MPa] | 260 | 550 |
| ν12 | 0.1 | 0.1 |
| ν13 | 0.1 | 0.1 |
| ν23 | 0.1 | 0.1 |
| Eb,1 9 mm [MPa] | 10,950 | 15,350 |
| Eb,2 9 mm [MPa] | 6550 | 9150 |
| Eb,1 12 mm [MPa] | 10,450 | 14,650 |
| Eb,2 12 mm [MPa] | 7000 | 9800 |
| Density [ton/mm3] | 6.8 × 10−10 | 6.8 × 10−10 |
| SHEAR RESPONSE | PEAK DIFF. | IMP. DIFF | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Rise Time [msec] | Peak Value (Linear) | Peak Value (Nonlinear) | Impulse (Linear) | Impulse (Nonlinear) | [2)-1)]/2)] | [4)-3)]/4) | [4)-1)]/4) | [6)-5)]/6) | [8)-7)]/8) | [8)-5)]/8) | ||||
| TIRF (Shear) 1) | DIR (Shear) 2) | TIRF (Shear) 3) | DIR (Shear) 4) | TIRF (Shear) 5) | DIR (Shear) 6) | TIRF (Shear) 7) | DIR (Shear) 8) | |||||||
| [N/mm] | [Nmm msec/mm] | |||||||||||||
| 1 | 4.28 | 4.32 | 4.40 | 4.32 | 4.30 | 4.30 | 4.52 | 4.29 | 0.8% | −1.8% | 0.9% | 0.1% | −5.5% | −0.3% |
| 2 | 4.29 | 4.30 | 4.48 | 4.31 | 8.50 | 8.50 | 8.98 | 8.50 | 0.4% | −4.0% | 0.6% | 0.0% | −5.6% | 0.1% |
| 3 | 4.27 | 4.28 | 4.49 | 4.28 | 12.75 | 12.74 | 13.92 | 12.72 | 0.2% | −4.9% | 0.3% | −0.1% | −9.4% | 0.2% |
| 5 | 4.26 | 4.26 | 4.51 | 4.26 | 21.25 | 21.21 | 23.19 | 21.20 | 0.0% | −5.9% | 0.0% | −0.2% | −9.4% | 0.2% |
| 10 | 4.25 | 4.24 | 4.58 | 4.24 | 42.48 | 42.40 | 46.39 | 42.38 | −0.4% | −8.0% | −0.4% | −0.2% | −9.4% | 0.2% |
| 20 | 4.23 | 4.24 | 4.59 | 4.24 | 84.95 | 84.80 | 92.77 | 84.76 | 0.2% | −8.2% | 0.1% | −0.2% | −9.5% | 0.2% |
| Max | 0.8% | −1.8% | 0.9% | 0.1% | −5.5% | 0.1% | ||||||||
| SHEAR RESPONSE | PEAK DIFF. | IMP. DIFF | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Rise Time [msec] | Peak Value (Linear) | Peak Value (Nonlinear) | Impulse (Linear) | Impulse (Nonlinear) | [2)-1]/2)] | [4)-3)]/4) | [4)-1]/4) | [6)-5)]/6) | [8)-7)]/8) | [8)-5)]/8) | ||||
| TIRF (Shear) 1) | DIR (Shear) 2) | TIRF (Shear) 3) | DIR (Shear) 4) | TIRF (Shear) 5) | DIR (Shear) 6) | TIRF (Shear) 7) | DIR (Shear) 8) | |||||||
| [N/mm] | [Nmm msec/mm] | |||||||||||||
| 1 | 86.51 | 87.26 | 88.85 | 87.32 | 89.09 | 89.19 | 94.80 | 89.68 | 0.9% | −1.7% | 0.9% | 0.1% | −5.7% | 0.7% |
| 2 | 86.65 | 87.01 | 92.55 | 89.03 | 168.10 | 168.19 | 180.79 | 171.52 | 0.4% | −3.9% | 2.7% | 0.1% | −5.4% | 2.0% |
| 3 | 84.60 | 84.81 | 90.39 | 86.12 | 260.39 | 251.59 | 285.69 | 254.30 | 0.2% | −5.0% | 1.8% | −3.5% | −12.3% | −2.4% |
| 5 | 85.55 | 84.64 | 91.02 | 85.85 | 433.83 | 418.89 | 476.15 | 424.18 | −1.1% | −6.0% | 0.3% | −3.6% | −12.3% | −2.3% |
| 10 | 86.15 | 84.22 | 93.12 | 85.03 | 867.54 | 838.04 | 952.30 | 846.94 | −2.3% | −9.5% | −1.3% | −3.5% | −12.4% | −2.4% |
| 20 | 86.45 | 83.68 | 93.44 | 84.56 | 1735.01 | 1675.74 | 1904.60 | 1693.46 | −3.3% | −10.5% | −2.2% | −3.5% | −12.5% | −2.5% |
| Max | 0.9% | −1.7% | 2.7% | 0.1% | −5.4% | 2.0% | ||||||||
| Rise Time [msec] | Area [m2] | Peak (Linear) [N/mm] | Peak (Nonlinear) [N/mm] | Impulse (Linear) [Nmsec/mm] | Impulse (Nonlinear) [Nmsec/mm] | Peak DIFF. | Impulse DIFF. | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TIRF 1) | DIR 2) | TIRF 3) | DIR 4) | TIRF 5) | DIR 6) | TIRF 7) | DIR 8) | [2)-1)]/2) | [4)-3]/4) | [4)-1]/4) | [6)-5)]/6) | [-8)-7)]-8) | [8)-5)]-8) | ||
| 1 | 0.13 | 56.2 | 59.5 | 58.7 | 59.3 | 55.0 | 56.1 | 60.7 | 56.3 | 5.5% | 1.0% | 5.2% | 2.1% | −7.8% | 2.4% |
| 0.40 | 55.5 | 57.3 | 57.3 | 57.1 | 55.4 | 55.0 | 58.0 | 55.0 | 3.1% | −0.4% | 2.8% | −0.8% | −5.4% | −0.8% | |
| 0.53 | 56.0 | 56.7 | 57.4 | 56.5 | 55.8 | 55.0 | 59.4 | 54.9 | 1.2% | −1.6% | 0.8% | −1.4% | −8.3% | −1.6% | |
| 0.80 | 56.0 | 56.6 | 57.4 | 56.4 | 56.0 | 55.0 | 59.3 | 54.9 | 1.1% | −1.9% | 0.7% | −1.8% | −8.0% | −2.0% | |
| 1.20 | 51.3 | 50.9 | 52.0 | 50.7 | 53.1 | 51.6 | 55.9 | 51.6 | −0.7% | −2.7% | −1.3% | −3.0% | −8.4% | −2.9% | |
| 2 | 0.13 | 55.3 | 55.8 | 59.1 | 56.0 | 109.1 | 108.5 | 121.3 | 108.6 | 1.0% | −5.5% | 1.4% | −0.5% | −11.7% | −0.5% |
| 0.40 | 55.5 | 54.6 | 57.1 | 54.6 | 111.1 | 106.2 | 114.2 | 106.3 | −1.7% | −4.5% | −1.6% | −4.6% | −7.4% | −4.5% | |
| 0.53 | 55.4 | 54.3 | 58.4 | 54.3 | 110.2 | 105.0 | 118.8 | 104.8 | −2.0% | −7.6% | −2.1% | −4.9% | −13.3% | −5.1% | |
| 0.80 | 55.6 | 54.4 | 58.2 | 54.3 | 110.8 | 105.5 | 118.1 | 105.3 | −2.2% | −7.2% | −2.3% | −5.0% | −12.2% | −5.2% | |
| 1.20 | 52.2 | 51.2 | 53.9 | 50.9 | 106.3 | 98.0 | 111.3 | 98.0 | −2.0% | −5.7% | −2.5% | −8.5% | −13.6% | −8.5% | |
| 5 | 0.13 | 54.8 | 54.2 | 59.4 | 54.3 | 272.2 | 270.6 | 303.2 | 270.8 | −1.0% | −9.3% | −0.8% | −0.6% | −11.9% | −0.5% |
| 0.40 | 55.5 | 53.0 | 56.9 | 53.0 | 277.9 | 264.9 | 274.3 | 264.4 | −4.7% | −7.4% | −4.8% | −4.9% | −7.5% | −5.1% | |
| 0.53 | 55.1 | 52.4 | 59.0 | 52.2 | 274.5 | 261.8 | 296.9 | 260.8 | −5.0% | −12.9% | −5.4% | −4.8% | −13.8% | −5.3% | |
| 0.80 | 55.6 | 52.7 | 58.7 | 52.5 | 276.0 | 262.8 | 294.8 | 262.0 | −5.1% | −11.7% | −5.4% | −5.0% | −12.5% | −5.4% | |
| 1.20 | 52.2 | 48.8 | 55.0 | 52.2 | 265.7 | 243.6 | 278.8 | 260.8 | −8.1% | −5.3% | −1.0% | −9.1% | −6.9% | −1.9% | |
| 10 | 0.13 | 54.6 | 54.2 | 59.5 | 54.2 | 544.2 | 541.2 | 606.4 | 541.4 | −0.8% | −9.7% | −0.7% | −0.6% | −12.0% | −0.5% |
| 0.40 | 55.6 | 53.0 | 56.9 | 52.9 | 555.9 | 541.2 | 568.2 | 529.1 | −4.9% | −7.4% | −5.0% | −4.9% | −7.4% | −5.1% | |
| 0.53 | 55.0 | 52.4 | 56.9 | 52.2 | 548.7 | 529.7 | 593.8 | 521.7 | −4.9% | −13.4% | −5.4% | −4.8% | −13.8% | −5.2% | |
| 0.80 | 55.3 | 52.6 | 59.2 | 52.4 | 551.8 | 523.7 | 568.2 | 524.0 | −5.0% | −8.4% | −5.4% | −5.0% | −8.4% | −5.3% | |
| 1.20 | 53.1 | 48.8 | 56.9 | 48.6 | 1062.9 | 525.7 | 1114.9 | 969.8 | −8.7% | −14.4% | −9.2% | −9.1% | −15.0% | −9.6% | |
| 20 | 0.13 | 54.5 | 54.2 | 59.5 | 54.2 | 1088.6 | 1082.3 | 1212.8 | 1082.7 | −0.7% | −9.8% | −0.6% | −0.6% | −12.0% | −0.5% |
| 0.40 | 55.6 | 53.0 | 56.8 | 53.0 | 1111.7 | 1059.4 | 1136.2 | 1058.1 | −4.9% | −7.3% | −4.9% | −4.9% | −7.4% | −5.1% | |
| 0.53 | 54.9 | 52.4 | 59.3 | 52.2 | 1097.3 | 1047.4 | 1043.3 | 1043.3 | −4.8% | −13.6% | −5.2% | −4.8% | 0.0% | −5.2% | |
| 0.80 | 55.2 | 52.6 | 56.8 | 52.4 | 1103.5 | 1051.3 | 1136.2 | 1047.9 | −5.0% | −8.4% | −5.3% | −5.0% | −8.4% | −5.3% | |
| 1.20 | 53.1 | 48.8 | 55.6 | 48.6 | 1062.9 | 974.4 | 1114.9 | 969.8 | −8.7% | −14.4% | −9.2% | −9.1% | −15.0% | −9.6% | |
| Max | 5.5% | 1.0% | 5.2% | 2.1% | 0.0% | 2.4% | |||||||||
| Rise Time [msec] | Area [m2] | Peak (Linear) [N/mm] | Peak (Nonlinear) [N/mm] | Impulse (Linear) [Nmsec/mm] | Impulse (Nonlinear) [Nmsec/mm] | Peak DIFF. | Impulse DIFF. | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TIRF 1) | DIR 2) | TIRF 3) | DIR 4) | TIRF 5) | DIR 6) | TIRF 7) | DIR 8) | [2)-1)]/2) | [4)-3]/4) | [4)-1]/4) | [6)-5)]/6) | [-8)-7)]-8) | [8)-5)]-8) | ||
| 1 | 0.13 | 681.5 | 700.0 | 687.2 | 693.9 | 666.2 | 672.1 | 703.8 | 675.2 | 2.6% | 1.0% | 1.8% | 0.9% | −4.2% | 1.3% |
| 0.40 | 783.0 | 839.8 | 762.1 | 868.5 | 749.1 | 781.0 | 670.2 | 804.4 | 6.8% | 12.3% | 9.8% | 4.1% | 16.7% | 6.9% | |
| 0.53 | 756.2 | 819.7 | 755.3 | 853.6 | 708.3 | 742.0 | 668.9 | 773.6 | 7.7% | 11.5% | 11.4% | 4.5% | 13.5% | 8.4% | |
| 0.80 | 760.6 | 817.4 | 757.6 | 851.2 | 724.0 | 746.8 | 773.6 | 773.6 | 7.0% | 11.0% | 10.6% | 3.1% | 0.0% | 6.4% | |
| 1.20 | 759.6 | 806.4 | 750.2 | 759.3 | 728.2 | 751.8 | 801.1 | 749.2 | 5.8% | 1.2% | 0.0% | 3.1% | −6.9% | 2.8% | |
| 2 | 0.13 | 647.6 | 663.9 | 687.7 | 667.8 | 1253.8 | 1281.0 | 1383.8 | 1287.1 | 2.5% | −3.0% | 3.0% | 2.1% | −7.5% | 2.6% |
| 0.40 | 740.6 | 778.0 | 632.1 | 800.9 | 1421.6 | 1499.7 | 1283.3 | 1541.6 | 4.8% | 21.1% | 7.5% | 5.2% | 16.8% | 7.8% | |
| 0.53 | 965.8 | 738.0 | 622.9 | 768.8 | 1306.7 | 1405.5 | 1083.9 | 1454.4 | 5.7% | 19.0% | 9.5% | 7.0% | 25.5% | 10.2% | |
| 0.80 | 712.0 | 744.0 | 636.5 | 770.2 | 1357.2 | 1431.8 | 1122.5 | 1477.4 | 4.3% | 17.4% | 7.6% | 5.2% | 24.0% | 8.1% | |
| 1.20 | 719.5 | 749.6 | 775.4 | 744.8 | 1383.0 | 1437.4 | 1601.3 | 1414.1 | 4.0% | −4.1% | 3.4% | 3.8% | −13.2% | 2.2% | |
| 5 | 0.13 | 627.2 | 640.5 | 687.8 | 642.5 | 3078.7 | 3194.6 | 3442.8 | 3203.9 | 2.1% | −7.1% | 2.4% | 3.6% | −7.5% | 3.9% |
| 0.40 | 715.3 | 752.6 | 636.8 | 774.0 | 3502.0 | 3742.1 | 3201.0 | 3846.6 | 5.0% | 17.7% | 7.6% | 6.4% | 16.8% | 9.0% | |
| 0.53 | 659.7 | 706.4 | 543.3 | 727.2 | 3192.3 | 3512.9 | 2492.4 | 3614.4 | 6.6% | 25.3% | 9.3% | 9.1% | 31.0% | 11.7% | |
| 0.80 | 683.0 | 719.1 | 563.8 | 742.6 | 3330.5 | 3578.3 | 2613.0 | 3719.7 | 5.0% | 24.1% | 8.0% | 6.9% | 29.8% | 10.5% | |
| 1.20 | 695.6 | 721.6 | 790.3 | 70,737 | 3407.7 | 3585.0 | 4002.5 | 3514.8 | 3.6% | −11.7% | 1.7% | 4.9% | −13.9% | 3.0% | |
| 10 | 0.13 | 620.4 | 639.6 | 687.9 | 641.5 | 6141.3 | 6391.0 | 6880.8 | 6410.6 | 3.0% | −7.2% | 3.3% | 3.9% | −7.3% | 4.2% |
| 0.40 | 706.9 | 752.1 | 638.4 | 773.0 | 6989.2 | 7486.5 | 6399.9 | 7695.7 | 6.0% | 17.4% | 8.6% | 6.6% | 16.8% | 9.2% | |
| 0.53 | 647.6 | 705.0 | 516.8 | 724.1 | 6363.3 | 7019.7 | 4922.8 | 7228.1 | 8.1% | 28.6% | 10.6% | 9.4% | 31.9% | 12.0% | |
| 0.80 | 673.4 | 718.8 | 539.5 | 741.6 | 6643.2 | 7141.6 | 5170.7 | 7382.9 | 6.3% | 27.2% | 9.2% | 7.0% | 30.0% | 10.0% | |
| 1.20 | 683.6 | 718.2 | 798.0 | 705.8 | 13,595.1 | 14,302.4 | 16,009.5 | 14,048.2 | 4.8% | −13.1% | 3.1% | 4.9% | −14.0% | 3.2% | |
| 20 | 0.13 | 617.0 | 640.0 | 687.9 | 641.8 | 12,274.7 | 12,782.0 | 13,759.3 | 12,824.2 | 3.6% | −7.2% | 3.9% | 4.0% | −7.3% | 4.3% |
| 0.40 | 702.6 | 752.6 | 639.2 | 773.4 | 13,971.0 | 14,982.7 | 12,798.9 | 15,399.1 | 6.6% | 17.4% | 9.1% | 6.8% | 16.9% | 9.3% | |
| 0.53 | 641.6 | 704.2 | 503.5 | 723.4 | 12,715.9 | 14,156.1 | 9814.5 | 14,435.3 | 8.9% | 30.4% | 11.3% | 10.2% | 32.0% | 11.9% | |
| 0.80 | 668.6 | 716.9 | 527.4 | 739.7 | 13,277.4 | 14,363.1 | 10,313.9 | 14,739.5 | 6.7% | 28.7% | 9.6% | 7.6% | 30.0% | 9.9% | |
| 1.20 | 683.6 | 718.2 | 798.0 | 705.8 | 13,595.1 | 14,302.4 | 16,009.5 | 14,048.2 | 4.8% | −13.1% | 3.1% | 4.9% | −14.0% | 3.2% | |
| Max | 8.9% | 30.4% | 11.4% | 10.2% | 32.0% | 12.0% | |||||||||
| Hull Plate Thickness [mm] | Longitudinal Spacing [mm] | Frame Spacing [mm] | Longitudinal Stiffener—Angle Type [mm] |
|---|---|---|---|
| 14 | 810 | 2800 | 200 × 90 × 9/14 |
| Rise Time [msec] | Area [m2] | Peak (Linear) [N/mm] | Peak (Nonlinear) [N/mm] | Impulse (Linear) [Nmsec/mm] | Impulse (Nonlinear) [Nmsec/mm] | Peak DIFF. | Impulse DIFF. | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TIRF 1) | DIR 2) | TIRF 3) | DIR 4) | TIRF 5) | DIR 6) | TIRF 7) | DIR 8) | [2)-1)]/2) | [4)-3]/4) | [4)-1]/4) | [6)-5)]/6) | [-8)-7)]-8) | [8)-5)]-8) | ||
| 1 | 0.13 | 56.9 | 62.1 | 59.8 | 58.7 | 56.6 | 57.7 | 61.7 | 54.9 | 8.4% | −2.0% | 3.0% | 1.9% | −12.4% | −3.1% |
| 0.40 | 53.1 | 56.5 | 57.4 | 56.5 | 51.9 | 52.8 | 58.5 | 52.8 | 6.2% | −1.7% | 6.1% | 1.9% | −10.7% | 1.9% | |
| 0.53 | 52.7 | 55.7 | 57.1 | 55.6 | 50.7 | 51.7 | 60.0 | 51.6 | 5.4% | −2.8% | 5.2% | 1.9% | −16.2% | 1.9% | |
| 0.80 | 52.8 | 55.3 | 57.0 | 55.3 | 51.0 | 51.8 | 61.0 | 52.6 | 4.6% | −3.1% | 4.5% | 1.5% | −15.9% | 3.0% | |
| 1.20 | 47.8 | 50.4 | 51.9 | 50.4 | 46.1 | 46.8 | 54.5 | 47.1 | 5.3% | −3.0% | 5.2% | 1.5% | −15.7% | 2.1% | |
| 2 | 0.13 | 57.6 | 57.5 | 60.8 | 54.6 | 115.9 | 112.7 | 123.4 | 107.8 | −0.2% | −11.2% | −5.4% | −2.8% | −14.5% | −7.5% |
| 0.40 | 52.5 | 52.8 | 57.8 | 52.6 | 103.9 | 106.9 | 116.4 | 106.3 | 0.6% | −9.8% | 0.3% | 2.8% | −9.5% | 2.3% | |
| 0.53 | 51.0 | 51.6 | 58.5 | 51.5 | 99.3 | 100.7 | 119.9 | 101.1 | 1.1% | −13.6% | 1.0% | 1.3% | −18.5% | 1.8% | |
| 0.80 | 51.2 | 52.0 | 59.0 | 51.8 | 100.0 | 105.4 | 121.9 | 103.8 | 1.5% | −13.8% | 1.2% | 5.1% | −17.5% | 3.7% | |
| 1.20 | 47.1 | 47.2 | 53.2 | 47.0 | 93.0 | 279.2 | 109.0 | 97.8 | 0.1% | −13.1% | −0.2% | 7.8% | −11.4% | 4.9% | |
| 5 | 0.13 | 58.1 | 56.3 | 61.3 | 53.7 | 291.6 | 268.3 | 308.4 | 267.4 | −3.1% | −14.1% | −8.0% | −4.4% | −15.3% | −9.0% |
| 0.40 | 52.2 | 53.3 | 58.0 | 53.1 | 569.8 | 262.4 | 290.6 | 265.4 | 2.1% | −9.2% | 1.7% | 3.2% | −9.5% | 2.1% | |
| 0.53 | 50.0 | 51.0 | 59.3 | 50.8 | 247.1 | 267.1 | 299.5 | 260.1 | 1.9% | −16.7% | 1.6% | 5.9% | −15.1% | 5.0% | |
| 0.80 | 50.3 | 52.2 | 60.2 | 52.1 | 248.6 | 248.5 | 304.8 | 265.4 | 3.6% | −15.4% | 3.6% | 6.9% | −14.8% | 6.3% | |
| 1.20 | 46.8 | 47.4 | 46.7 | 48.4 | 232.2 | 559.6 | 272.5 | 245.7 | 1.3% | 3.4% | 3.2% | 6.2% | −10.9% | 5.1% | |
| 10 | 0.13 | 58.2 | 56.0 | 61.5 | 53.4 | 583.8 | 536.4 | 616.8 | 533.0 | −4.0% | −15.1% | −9.0% | −4.3% | −15.7% | −9.5% |
| 0.40 | 52.1 | 53.7 | 58.0 | 53.1 | 519.7 | 522.2 | 581.1 | 531.8 | 2.9% | −9.2% | 2.0% | 3.1% | −9.3% | 2.3% | |
| 0.53 | 49.7 | 52.3 | 59.6 | 52.3 | 493.7 | 539.0 | 599.0 | 522.4 | 4.9% | −14.0% | 5.0% | 5.4% | −14.7% | 5.5% | |
| 0.80 | 50.0 | 53.7 | 60.6 | 52.3 | 496.9 | 539.0 | 609.5 | 525.3 | 6.8% | −15.7% | 4.5% | 7.8% | −16.0% | 5.4% | |
| 1.20 | 46.7 | 48.0 | 54.4 | 47.9 | 932.6 | 964.7 | 1089.9 | 959.9 | 2.7% | −13.6% | 2.5% | 3.3% | −13.5% | 2.8% | |
| 20 | 0.13 | 58.3 | 56.0 | 61.6 | 53.2 | 1167.6 | 1117.4 | 1233.5 | 1063.0 | −4.2% | −15.7% | −9.5% | −4.5% | −16.0% | −9.8% |
| 0.40 | 52.0 | 53.7 | 58.1 | 53.3 | 1039.5 | 1068.8 | 1162.0 | 1062.4 | 3.1% | −8.9% | 2.4% | 2.7% | −9.4% | 2.2% | |
| 0.53 | 49.5 | 52.2 | 59.8 | 52.3 | 987.3 | 1037.6 | 1198.1 | 1039.1 | 5.2% | −14.2% | 5.3% | 4.9% | −15.3% | 5.0% | |
| 0.80 | 49.8 | 53.2 | 60.8 | 52.7 | 993.5 | 1056.9 | 1219.0 | 1048.3 | 6.3% | −15.2% | 5.5% | 6.0% | −16.3% | 5.2% | |
| 1.20 | 46.7 | 48.0 | 54.4 | 47.9 | 932.6 | 964.7 | 1089.9 | 959.9 | 2.7% | −13.6% | 2.5% | 3.3% | −13.5% | 2.8% | |
| Max | 8.4% | 3.4% | 6.1% | 7.8% | −9.3% | 6.3% | |||||||||
| Rise Time [msec] | Area [m2] | Peak (Linear) [N/mm] | Peak (Nonlinear) [N/mm] | Impulse (Linear) [Nmsec/mm] | Impulse (Nonlinear) [Nmsec/mm] | Peak DIFF. | Impulse DIFF. | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TIRF 1) | DIR 2) | TIRF 3) | DIR 4) | TIRF 5) | DIR 6) | TIRF 7) | DIR 8) | [2)-1)]/ 2) | [4)-3]/4) | [4)-1] /4) | [6)-5)]/ 6) | [-8)-7)]-8) | [8)-5)]-8) | ||
| 1 | 0.13 | 968.0 | 1082.0 | 854.4 | 869.4 | 958.8 | 1026.1 | 879.4 | 852.1 | 10.5% | 1.7% | −11.3% | 6.6% | −3.2% | −12.5% |
| 0.40 | 670.2 | 670.2 | 836.5 | 847.3 | 663.3 | 828.7 | 865.8 | 831.2 | 20.5% | 1.3% | 20.9% | 20.0% | −4.2% | 20.2% | |
| 0.53 | 655.4 | 655.4 | 762.5 | 657.8 | 646.8 | 671.1 | 760.0 | 672.2 | 7.4% | −15.9% | 0.4% | 3.6% | −13.1% | 3.8% | |
| 0.80 | 782.3 | 782.3 | 709.9 | 712.1 | 747.2 | 818.3 | 747.7 | 677.2 | 10.5% | 0.3% | −9.9% | 8.7% | −10.4% | −10.3% | |
| 1.20 | 659.6 | 659.6 | 712.2 | 713.9 | 653.7 | 678.3 | 746.9 | 679.5 | 7.3% | 0.2% | 7.6% | 3.6% | −9.9% | 3.8% | |
| 2 | 0.13 | 971.4 | 995.4 | 860.3 | 846.9 | 1941.7 | 1934.6 | 1738.9 | 1623.1 | 2.4% | −1.6% | −14.7% | −0.4% | −7.1% | −19.6% |
| 0.40 | 669.0 | 799.3 | 849.5 | 825.8 | 1345.3 | 1528.8 | 1726.8 | 1564.6 | 16.3% | −2.9% | 19.0% | 12.0% | −10.4% | 14.0% | |
| 0.53 | 653.0 | 656.2 | 733.7 | 669.4 | 1299.2 | 1290.7 | 1520.0 | 1338.8 | 0.5% | −9.6% | 2.5% | −0.7% | −13.5% | 3.0% | |
| 0.80 | 746.3 | 790.9 | 737.6 | 674.7 | 1438.9 | 1602.7 | 1530.6 | 1325.6 | 5.6% | −9.3% | −10.6% | 10.2% | −15.5% | −8.5% | |
| 1.20 | 659.6 | 664.2 | 729.6 | 676.9 | 1316.1 | 1274.5 | 1493.9 | 1296.7 | 0.7% | −7.8% | 2.6% | −3.3% | −15.2% | −1.5% | |
| 5 | 0.13 | 973.5 | 966.8 | 863.8 | 812.3 | 4871.1 | 4790.7 | 4333.3 | 3985.0 | −0.7% | −6.3% | −19.8% | −1.7% | −8.7% | −22.2% |
| 0.40 | 673.0 | 764.0 | 857.4 | 783.2 | 3376.2 | 3748.6 | 4313.7 | 3899.7 | 11.9% | −9.5% | 14.1% | 9.9% | −10.6% | 13.4% | |
| 0.53 | 651.6 | 647.2 | 749.5 | 656.2 | 3252.2 | 3168.1 | 3800.0 | 3264.4 | −0.7% | −14.2% | 0.7% | −2.7% | −16.4% | 0.4% | |
| 0.80 | 725.0 | 798.1 | 754.2 | 658.2 | 3560.6 | 3878.6 | 3826.5 | 3325.2 | 9.2% | −14.6% | −10.1% | 8.2% | −15.1% | −7.1% | |
| 1.20 | 659.5 | 636.1 | 740.0 | 647.5 | 3296.4 | 3142.0 | 3734.7 | 3319.8 | −3.7% | −14.3% | −1.9% | 4.9% | −12.5% | 0.7% | |
| 10 | 0.13 | 974.2 | 962.0 | 865.0 | 797.3 | 9747.1 | 9580.1 | 8662.6 | 7913.5 | −1.3% | −8.5% | −22.2% | −1.7% | −9.5% | −23.2% |
| 0.40 | 674.4 | 754.9 | 860.0 | 777.2 | 6756.2 | 7584.4 | 8626.5 | 7760.2 | 10.7% | −10.7% | 13.2% | 10.9% | −11.2% | 12.9% | |
| 0.53 | 651.1 | 636.4 | 754.7 | 649.9 | 6505.5 | 6406.7 | 7600.0 | 6494.4 | −2.3% | −16.1% | −0.2% | −1.5% | −17.0% | −0.2% | |
| 0.80 | 717.8 | 774.2 | 759.8 | 654.9 | 7110.7 | 8060.3 | 7652.9 | 6563.7 | 7.3% | −16.0% | −9.6% | 11.8% | −16.6% | −8.3% | |
| 1.20 | 659.5 | 639.2 | 745.2 | 653.1 | 13,189.9 | 12,732.1 | 14,938.6 | 13,007.4 | −3.2% | −14.1% | −1.0% | −3.6% | −14.8% | −1.4% | |
| 20 | 0.13 | 974.5 | 962.7 | 865.5 | 795.2 | 19,496.6 | 19,198.4 | 17,323.2 | 15,928.4 | −1.2% | −8.9% | −22.6% | −1.6% | −8.8% | −22.4% |
| 0.40 | 675.1 | 761.1 | 861.3 | 781.0 | 13,514.3 | 15,128.6 | 17,252.5 | 15,501.5 | 11.3% | −10.3% | 13.6% | 10.7% | −11.3% | 12.8% | |
| 0.53 | 650.8 | 640.6 | 757.4 | 651.1 | 13,011.7 | 12,757.0 | 15,199.8 | 12,955.3 | −1.6% | −16.3% | 0.0% | −2.0% | −17.3% | −0.4% | |
| 0.80 | 714.3 | 797.7 | 762.5 | 657.8 | 14,216.1 | 16,025.4 | 15,305.8 | 13,101.9 | 10.5% | −15.9% | −8.6% | 11.3% | −16.8% | −8.5% | |
| 1.20 | 659.5 | 639.2 | 745.2 | 653.1 | 13,189.9 | 12,732.1 | 14,938.6 | 13,007.4 | −3.2% | −14.1% | −1.0% | −3.6% | −14.8% | −1.4% | |
| Max | 20.5% | 1.7% | 20.9% | 20.0% | −3.2% | 20.2% | |||||||||
| Model 2 | Model 3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Median | Max. | Mean | SD. | Mean ± 2 × SD | Median | Max. | Mean | SD. | Mean ± 2 × SD | |
| Shear | −2.3% | 5.2% | −2.7% | 3.4% | 4.2, −9.5% | 2.5% | 6.1% | 1.4% | 4.5% | 10.3, −7.5% |
| Bending | 7.6% | 11.4% | 6.6% | 3.5% | 13.6, −0.4% | −1.0% | 20.9% | −2.0% | 11.9% | 21.9, −25.8% |
| Rise Time [msec] | Area = 0.13 m2 | Area = 0.40 m2 | Area = 0.53 m2 | Area = 0.80 m2 | Area = 1.20 m2 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| TIRF | DIR | TIRF | DIR | TIRF | DIR | TIRF | DIR | TIRF | DIR | |
| 1 | 12.6 | 13.5 | 13.5 | 14.0 | 13.6 | 14.2 | 13.6 | 14.3 | 15.0 | 15.7 |
| 2 | 12.5 | 14.5 | 13.7 | 15.0 | 14.1 | 15.3 | 14.0 | 15.3 | 15.2 | 16.8 |
| 5 | 12.4 | 14.7 | 13.8 | 14.9 | 14.4 | 15.5 | 14.3 | 15.2 | 15.3 | 16.3 |
| 10 | 12.3 | 14.8 | 13.8 | 14.9 | 14.5 | 15.1 | 14.4 | 15.1 | 15.4 | 16.5 |
| 20 | 12.3 | 14.8 | 13.8 | 14.8 | 14.5 | 15.1 | 14.4 | 15.0 | 15.4 | 16.5 |
| Rise Time [msec] | Area = 0.13 m2 | Area = 0.40 m2 | Area = 0.53 m2 | Area = 0.80 m2 | Area = 1.20 m2 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| TIRF | DIR | TIRF | DIR | TIRF | DIR | TIRF | DIR | TIRF | DIR | |
| 1 | 15.2 | 21.3 | 21.9 | 21.8 | 22.4 | 28.1 | 18.8 | 26.0 | 22.3 | 25.9 |
| 2 | 15.1 | 21.8 | 21.9 | 23.4 | 22.5 | 27.6 | 19.7 | 27.4 | 22.3 | 27.3 |
| 5 | 15.1 | 22.8 | 21.9 | 23.6 | 22.5 | 28.2 | 20.3 | 28.1 | 22.3 | 28.6 |
| 10 | 15.1 | 23.2 | 21.8 | 23.8 | 22.6 | 28.5 | 20.5 | 28.2 | 22.3 | 28.3 |
| 20 | 15.1 | 23.3 | 21.7 | 23.7 | 22.6 | 28.4 | 20.6 | 28.1 | 22.3 | 28.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, Y.I.; Lee, S.H.; Kim, J.-H. Study of Applicability of Triangular Impulse Response Function for Ultimate Strength of LNG Cargo Containment Systems under Sloshing Impact Loads. Appl. Sci. 2023, 13, 2883. https://doi.org/10.3390/app13052883
Park YI, Lee SH, Kim J-H. Study of Applicability of Triangular Impulse Response Function for Ultimate Strength of LNG Cargo Containment Systems under Sloshing Impact Loads. Applied Sciences. 2023; 13(5):2883. https://doi.org/10.3390/app13052883
Chicago/Turabian StylePark, Young IL, Seung Ha Lee, and Jeong-Hwan Kim. 2023. "Study of Applicability of Triangular Impulse Response Function for Ultimate Strength of LNG Cargo Containment Systems under Sloshing Impact Loads" Applied Sciences 13, no. 5: 2883. https://doi.org/10.3390/app13052883