
A Numerical Investigation of Sloshing in a 3D Prismatic Tank with Various Baffle Types, Filling Rates, Input Amplitudes and Liquid Materials

Abstract
:1. Introduction
2. Materials and Methods
2.1. Modeling the Sloshing Motion of a Partially Liquid-Filled Fuel Tank
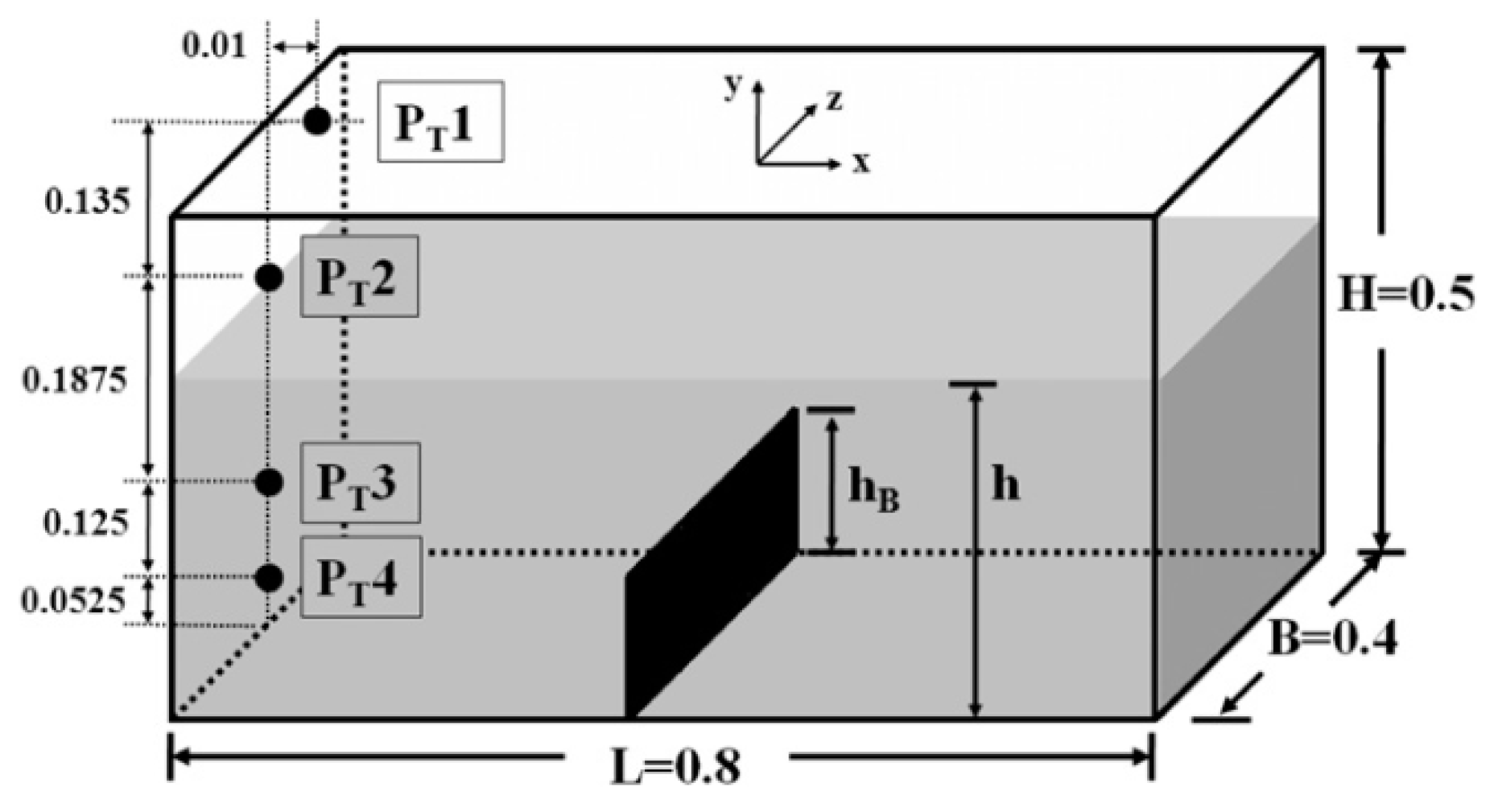
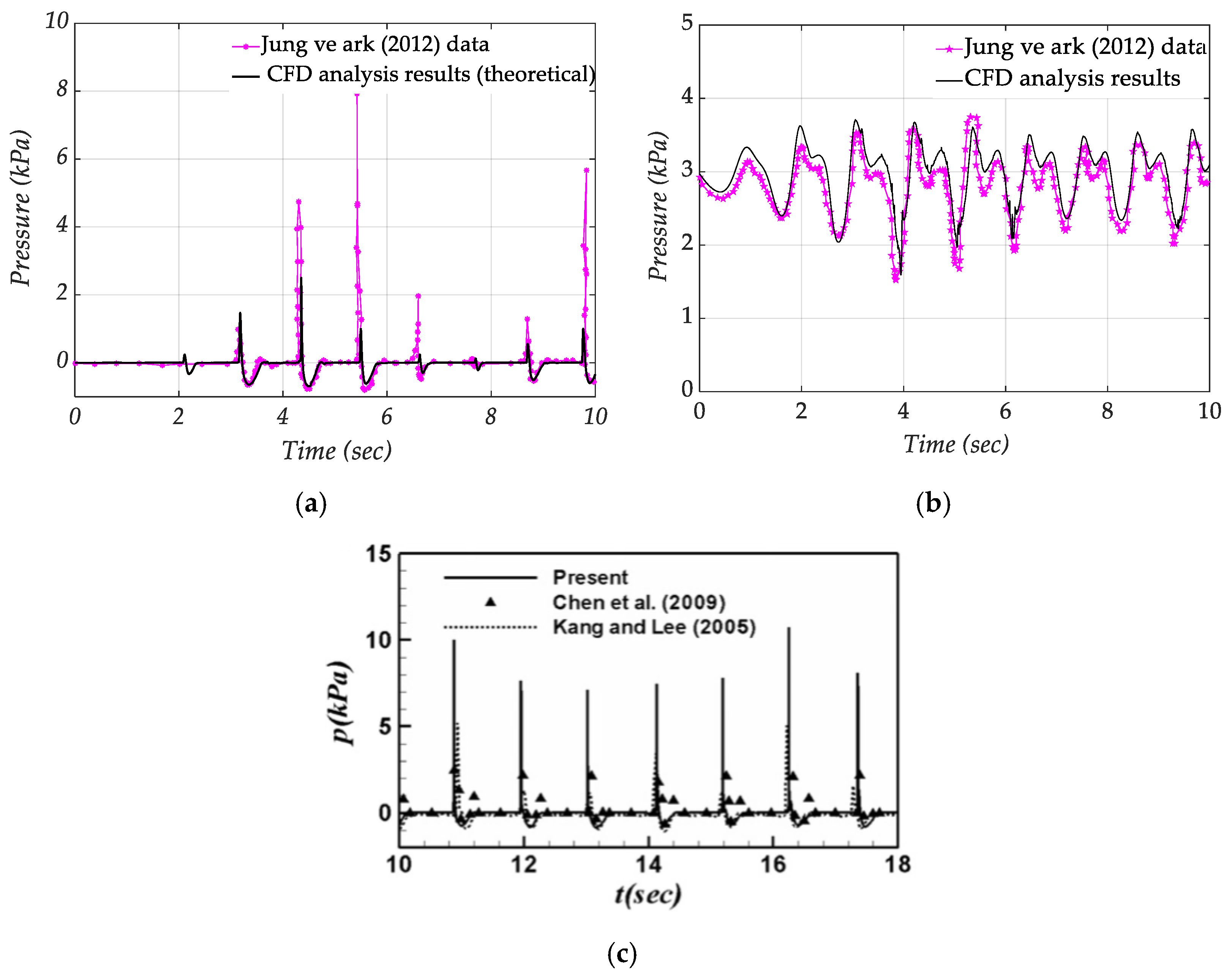
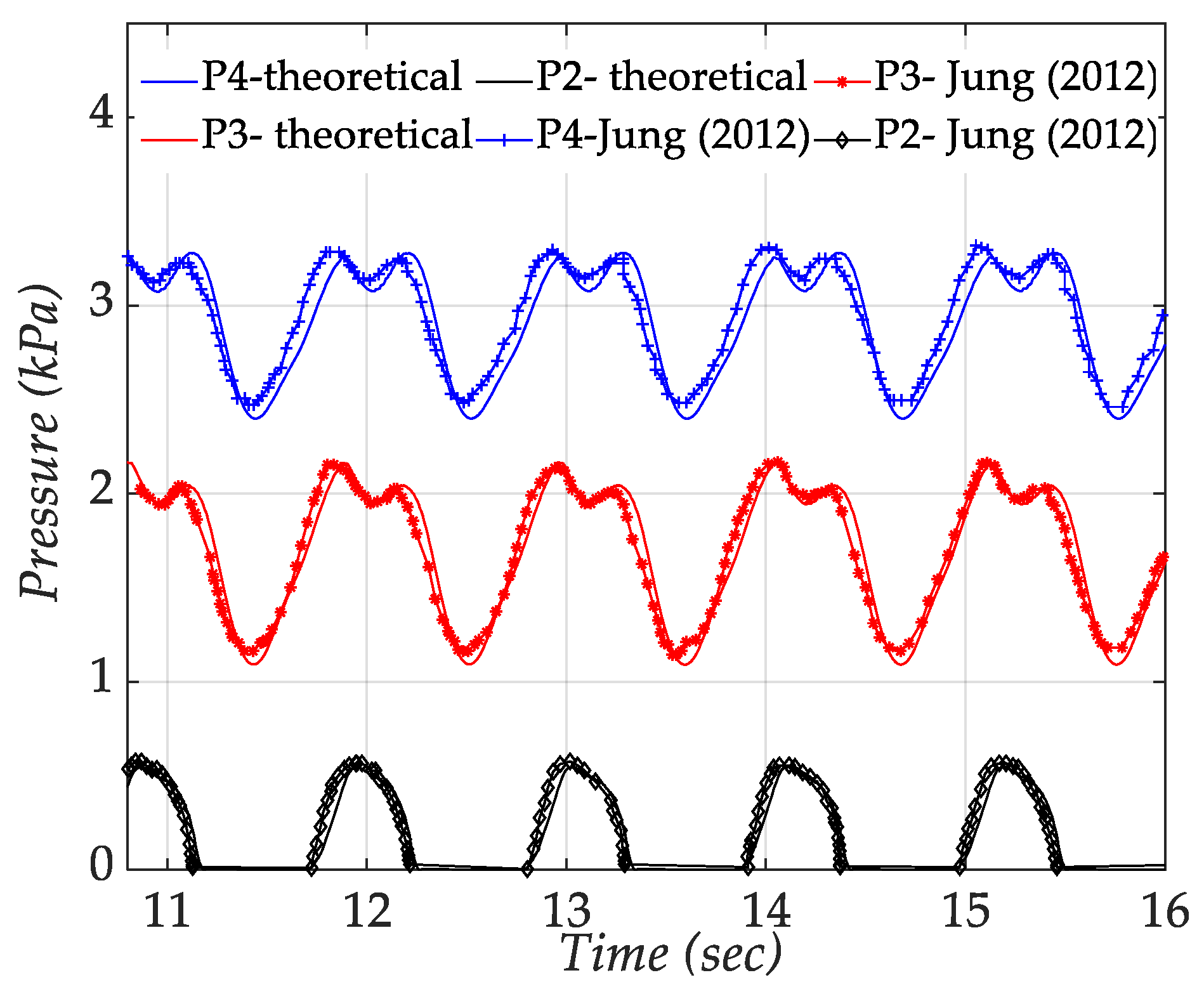
2.2. Validation Work
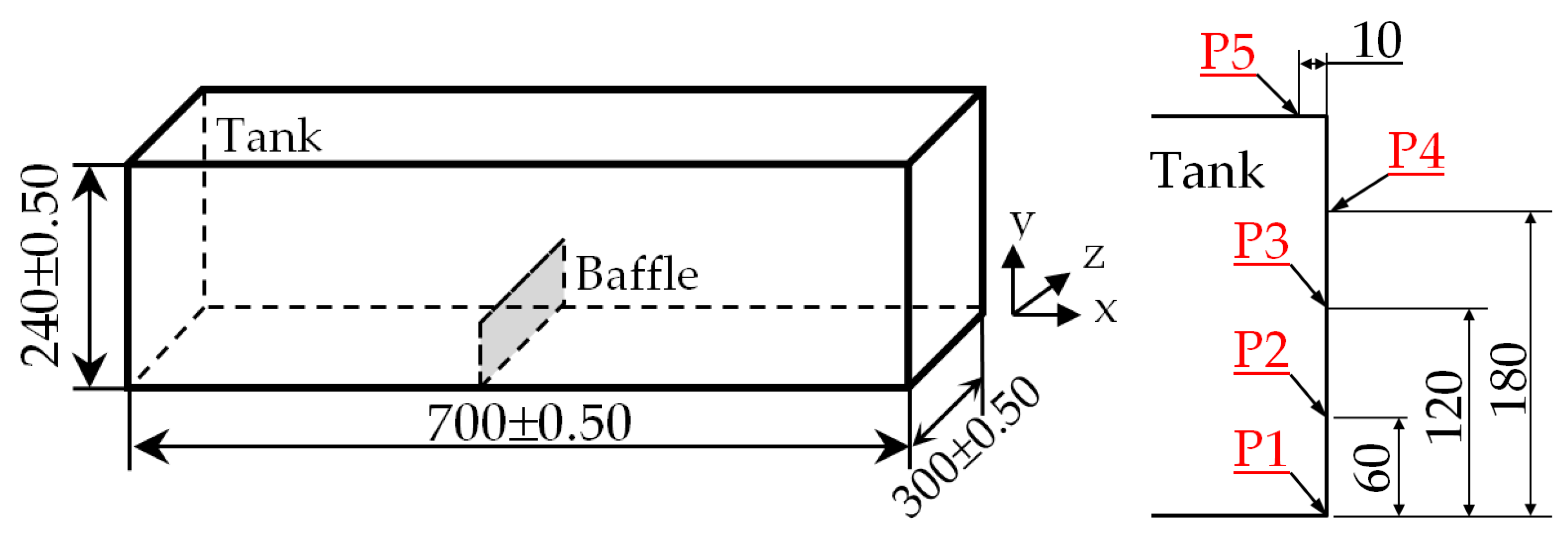
2.3. Definition of the Tank and Baffle Types
2.4. Definition of Numerical Simulation
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| a: Acceleration value of the excitation (m/s2) |
| A: Displacement amplitude (m) |
| ω: Angular frequency (rad/s) |
| ωn: Natural frequency (rad/s) |
| g: Gravitational acceleration (m/s2) |
| L: Tank length in the direction of the warning (m) |
| h: Liquid level in the tank (m) |
| n: Mode number |
| p: Pressure (Pa) |
| ρ: Density of the fluid (kg/m3) |
| μ: Viscosity of the fluid (kg/(m·s)) |
| g: Gravity vector |
| u: Velocity vector |
| : Gradient operator |
References
- Ibrahim, R.A. Liquid Sloshing Dynamics: Theory and Applications; Cambridge University Press: New York, NY, USA, 2005. [Google Scholar]
- Ibrahim, R.A.; Pilipchuk, V.N.; Ikeda, T. Recent Advances in Liquid Sloshing Dynamics. Appl. Mech. Rev. 2001, 54, 133–199. [Google Scholar] [CrossRef]
- Zhang, E.; Zhu, W.; Wang, L. Influencing Analysis of Different Baffle Factors on Oil Liquid Sloshing in Automobile Fuel Tank. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 3180–3193. [Google Scholar] [CrossRef]
- He, R.; Zhang, E.; Fan, B. Numerical Analysis on the Sloshing of Free Oil Liquid Surface under the Variable Conditions of Vehicle. Adv. Mech. Eng. 2019, 11, 168781401982996. [Google Scholar] [CrossRef]
- Akyıldız, H.; Ünal, N.E.; Aksoy, H. An Experimental Investigation of the Effects of the Ring Baffles on Liquid Sloshing in a Rigid Cylindrical Tank. Ocean Eng. 2013, 59, 190–197. [Google Scholar] [CrossRef]
- Akyildız, H.; Ünal, N.E. Sloshing in a Three-Dimensional Rectangular Tank: Numerical Simulation and Experimental Validation. Ocean Eng. 2006, 33, 2135–2149. [Google Scholar] [CrossRef]
- Jin, Q.; Xin, J.; Shi, F.; Shi, F. Parametric Studies on Sloshing in a Three-Dimensional Prismatic Tank with Different Water Depths, Excitation Frequencies, and Baffle Heights by a Cartesian Grid Method. Int. J. Nav. Archit. Ocean Eng. 2021, 13, 691–706. [Google Scholar] [CrossRef]
- Jung, J.H.; Yoon, H.S.; Lee, C.Y.; Shin, S.C. Effect of the Vertical Baffle Height on the Liquid Sloshing in a Three-Dimensional Rectangular Tank. Ocean Eng. 2012, 44, 79–89. [Google Scholar] [CrossRef]
- Rebollo, X.V.; Sadeghi, E.; Kusano, I.; García-Granada, A.-A. Study of the Sloshing Dynamics in Partially Filled Rectangular Tanks with Submerged Baffles Using VOF and LES Turbulence Methods for Different Impact Angles. Computation 2022, 10, 225. [Google Scholar] [CrossRef]
- Zhang, E.; He, R. Numerical Analysis on the Sloshing of Free Oil Liquid Surface Based on Fuel Tanks of Different Shapes. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 3584–3599. [Google Scholar] [CrossRef]
- Liu, Z.; Feng, Y.; Liu, Y.; Yan, J.; Li, Y. Effect of External Heat Input on Fluid Sloshing Dynamic Performance in a Liquid Oxygen Tank. Int. J. Aeronaut. Space Sci. 2020, 21, 879–888. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, H.; Chen, Q.; Chen, L. Numerical Study on Thermodynamic Performance in a Cryogenic Fuel Storage Tank under External Sloshing Excitation. Int. J. Aeronaut. Space Sci. 2021, 22, 1062–1074. [Google Scholar] [CrossRef]
- Ahmed, S.; Xin, H.; Faheem, M.; Qiu, B. Stability Analysis of a Sprayer UAV with a Liquid Tank with Different Outer Shapes and Inner Structures. Agriculture 2022, 12, 379. [Google Scholar] [CrossRef]
- Der Wiesche, S.A. Noise Due to Sloshing within Automotive Fuel Tanks. Forsch. Im Ing. Eng. Res. 2005, 70, 13–24. [Google Scholar] [CrossRef]
- Djavareshkian, M.H.; Khalili, M. Comparison of Finite Volume and Pendulum Models for Simulation of Sloshing. In Proceedings of the 14th Annual (International) Mechanical Engineering Conference, Isfahan, Iran, May 2006. [Google Scholar]
- Xue, M.-A.; Lin, P. Numerical Study of Ring Baffle Effects on Reducing Violent Liquid Sloshing. Comput. Fluids 2011, 52, 116–129. [Google Scholar] [CrossRef]
- Cho, J.R.; Lee, H.W. Numerical Study on Liquid Sloshing in Baffled Tank by Nonlinear Finite Element Method. Comput. Methods Appl. Mech. Eng. 2004, 193, 2581–2598. [Google Scholar] [CrossRef]
- Craig, K.J.; Kingsley, T.C. Multidisciplinary Design and Optimisation of Liquid Containers for Sloshing and Impact. Struct. Multidiscip. Optim. 2005, 33, 71–87. [Google Scholar] [CrossRef]
- Chitkara, T.K.; Kittur, Z.; Soman, R. Computational Simulation of Fuel Tank Sloshing Using CFD Techniques. SAE Tech. Pap. 2013, 2013, 12. [Google Scholar] [CrossRef]
- Vaishnav, D.; Dong, M.; Shah, M.; Gomez, F.; Usman, M. Investigation and Development of Fuel Slosh CAE Methodologies. SAE Int. J. Passeng. Cars Mech. Syst. 2014, 7, 278–288. [Google Scholar] [CrossRef]
- Tan, Y.; Ni, Y.; Wu, J.; Li, L.; Tan, D. Machinability Evolution of Gas-Liquid-Solid Three-Phase Rotary Abrasive Flow Finishing. Int. J. Adv. Manuf. Technol. 2023, 2023, 1–20. [Google Scholar] [CrossRef]
- Li, L.; Tan, D.; Yin, Z.; Wang, T.; Fan, X.; Wang, R. Investigation on the Multiphase Vortex and Its Fluid-Solid Vibration Characters for Sustainability Production. Renew. Energy 2021, 175, 887–909. [Google Scholar] [CrossRef]
- Li, L.; Xu, W.; Tan, Y.; Yang, Y.; Yang, J.; Tan, D. Fluid-Induced Vibration Evolution Mechanism of Multiphase Free Sink Vortex and the Multi-Source Vibration Sensing Method. Mech. Syst. Signal Process. 2023, 189, 110058. [Google Scholar] [CrossRef]
- Liu, Z.; Yuan, K.; Liu, Y.; Andersson, M.; Li, Y. Fluid sloshing hydrodynamics in a cryogenic fuel storage tank under different order natural frequencies. J. Energy Storage 2022, 52, 104830. [Google Scholar] [CrossRef]
- Sanapala, V.S.; Rajkumar, M.; Velusamy, K.; Patnaik, B. Numerical simulation of parametric liquid sloshing in a horizontally baffled rectangular container. J. Fluids Struct. 2018, 76, 229–250. [Google Scholar] [CrossRef]
- Ünal, U.O.; Bilici, G.; Akyıldız, H. Liquid sloshing in a two-dimensional rectangular tank: A numerical investigation with a T-shaped baffle. Ocean Eng. 2019, 187, 106183. [Google Scholar] [CrossRef]
- Topçu, E.E.; Kiliç, E.; Çavdar, K. Experimental Investigation of a Vehicle Fuel Tank Sloshing Behavior. Afyon Kocatepe Univ. J. Sci. Eng. 2017, 17, 292–301. [Google Scholar] [CrossRef]
- Wei, G.; Zhang, J. Numerical Study of the Filling Process of a Liquid Hydrogen Storage Tank under Different Sloshing Conditions. Processes 2020, 8, 1020. [Google Scholar] [CrossRef]
- Yu, L.; Xue, M.-A.; Zhu, A. Numerical Investigation of Sloshing in Rectangular Tank with Permeable Baffle. J. Mar. Sci. Eng. 2020, 8, 671. [Google Scholar] [CrossRef]
- Yuan, X.; Su, Y.; Xie, P. Frequency Characteristics of Sloshing Resonance in a Three-Dimensional Shallow-Water Rectangular Tank. J. Mar. Sci. Eng. 2022, 10, 1792. [Google Scholar] [CrossRef]
- Martinez-Carrascal, J.; González-Gutiérrez, L.M.; Calderon-Sanchez, J. Experimental and Numerical Characterization of Violent Sloshing Flows Using a Single Degree of Freedom Approach. Appl. Sci. 2022, 12, 7897. [Google Scholar] [CrossRef]
- Sun, Y.; Zhou, D.; Wang, J.; Gu, Z.; Qian, W. Sloshing of Liquid in a Cylindrical Tank with Multiple Baffles and Considering Soil-Structure Interaction. Appl. Sci. 2022, 12, 11841. [Google Scholar] [CrossRef]
- Wright, M.D.; Gambioli, F.; Malan, A.G. CFD Based Non-Dimensional Characterization of Energy Dissipation Due to Verticle Slosh. Appl. Sci. 2021, 11, 10401. [Google Scholar] [CrossRef]
- Kılıç, E. Analysis of Sloshing in Vehicle Fuel Tank; Uludağ University: Bursa, Türkiye, 2015. [Google Scholar]
- Toussi, I.B.; Kianoush, R.; Mohammadian, A. Numerical and Experimental Investigation of Rectangular Liquid-Containing Structures under Seismic Excitation. Infrastructures 2021, 6, 1. [Google Scholar] [CrossRef]
- Gao, J.-L.; Lyu, J.; Wang, J.-H.; Zhang, J.; Liu, Q.; Zang, J.; Zou, T. Study on Transient Gap Resonance with Consideration of the Motion of Floating Body. China Ocean Eng. 2022, 36, 994–1006. [Google Scholar] [CrossRef]
- Xue, M.-A.; Chen, Y.; Zheng, J.; Qian, L.; Yuan, X. Fluid dynamics analysis of sloshing pressure distribution in storage vessels of different shapes. Ocean Eng. 2019, 192, 106582. [Google Scholar] [CrossRef]
- Gao, J.; Ma, X.; Zang, J.; Dong, G.; Ma, X.; Zhu, Y.; Zhou, L. Numerical investigation of harbor oscillations induced by focused transient wave groups. Coast. Eng. 2020, 158, 103670. [Google Scholar] [CrossRef]
- Cengel, Y.A.; Cimbala, J.M. Fluid Mechanics: Fundamentals and Applications, 4th ed.; McGraw-Hill Education: Columbus, OH, USA, 2017; ISBN 9781259696534. [Google Scholar]
- Jadon, V.; Agawane, G.; Baghel, A.; Balide, V.; Banerjee, R.; Getta, A.; Viswanathan, H.; Awasthi, A. An Experimental and Multiphysics Based Numerical Study to Predict Automotive Fuel Tank Sloshing Noise. SAE Tech. Pap. 2014, 2014, 1–11. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Hou, L.; Li, F.; Wu, C. A numerical study of liquid sloshing in a two-dimensional tank under external excitations. J. Mar. Sci. Appl. 2012, 11, 305–310. [Google Scholar] [CrossRef]
- Chen, Y.G.; Price, W.G. Numerical simulation of liquid sloshing in a partially filled container with inclusion of compressibility effects. Phys. Fluids 2009, 21, 112105. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Baffle Structure | Input Excitation | Shape of the Baffle |
|---|---|---|
| 1. Tank without baffle | A = 0.1 m, w = 5.02 rad/s | - |
| 2. Flat baffle mounted from the bottom of the tank | A = 0.1 m, w = 5.02 rad/s |  x-y view x-y view |
| 3. Flat baffle mounted from the ceiling of the tank | A = 0.1 m, w = 5.02 rad/s |  x-y view x-y view |
| 4. Circular perforated baffled tank (There are 8 holes in the baffle with a diameter of 2.5 cm) | A = 0.1 m, w = 5.02 rad/s |  y-z view y-z view |
| 5. Rectangular perforated baffled tank (There are 8 rectangular holes of size 20 × 140 mm on the baffle) | A = 0.1 m, w = 5.02 rad/s |  y-z view y-z view |
| 6. Multi-baffled tank (3 baffles placed on the bottom) | A = 0.1 m, w = 5.02 rad/s |  x-y view x-y view |
| 7. Base-angled baffled tank (Two opposing baffle structures placed at 45° to the base surface) | A = 0.1 m, w = 5.02 rad/s |  x-y view x-y view |
| 8. Wall-angled baffled tank (Baffles are placed on the side walls at a height of 12 cm at 45°. Baffle length is 9.6 cm) | A = 0.1 m, w = 5.02 rad/s |  x-y view x-y view |
| 9. Tank without baffle | A = 0.02 m, w = wn | |
| 10. Tank with one flat baffle | A = 0.02 m, w = wn |  |
| 11. Perforated baffled tank (There are 8 holes in the baffle of diameter 2.5 cm) | A = 0.02 m, w = wn |  |
| 12. Multi-baffled tank (3 baffles placed on the bottom) | A = 0.02 m, w = wn |  |
| Tank Model | Node Number | Elements Number | Model |
|---|---|---|---|
| Tank without baffle | 55,025 | 50,400 | - |
| Flat baffle mounted from the bottom of the tank | 55,800 | 50,730 | |
| Flat baffle mounted from the ceiling of the tank | 55,800 | 50,760 | |
| Circular perforated baffled tank | 121,807 | 115,183 | Multizone |
| Rectangular perforated baffled tank | 442,080 | 422,476 | Multizone |
| Multi-baffled tank | 55,800 | 49,950 | - |
| Base-angled baffled tank | 56,451 | 51,300 | - |
| Wall-angled baffled tank | 56,265 | 50,910 | - |
| ρ (kg/m3) | μ (kg/(m·s)) | cp (J/kgK) | k (W/(mK)) | |
|---|---|---|---|---|
| Water | 998.2 | 0.001 | 4182 | 0.6 |
| Kerosene | 780 | 0.0024 | 2090 | 0.149 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Erzan Topçu, E.; Kılıç, E. A Numerical Investigation of Sloshing in a 3D Prismatic Tank with Various Baffle Types, Filling Rates, Input Amplitudes and Liquid Materials. Appl. Sci. 2023, 13, 2474. https://doi.org/10.3390/app13042474
Erzan Topçu E, Kılıç E. A Numerical Investigation of Sloshing in a 3D Prismatic Tank with Various Baffle Types, Filling Rates, Input Amplitudes and Liquid Materials. Applied Sciences. 2023; 13(4):2474. https://doi.org/10.3390/app13042474
Chicago/Turabian StyleErzan Topçu, Elif, and Eyüp Kılıç. 2023. "A Numerical Investigation of Sloshing in a 3D Prismatic Tank with Various Baffle Types, Filling Rates, Input Amplitudes and Liquid Materials" Applied Sciences 13, no. 4: 2474. https://doi.org/10.3390/app13042474